
《1.Introduction》
1.Introduction
With the expanding requirements of society, robotic technologies have developed rapidly in recent decades alongside electromechanical engineering technology and information technology. Robots are an integral component of human society and play very important roles in various fields. The first industrial robot, based on the fluid drive, was developed in the 1950s. With the development of electromechanical engineering and information technology, industrial robots based on electromechanical systems were then extensively and widely applied[1]. Various types of robots,including medical robots[2], service robots[3,4], bio-inspired robots[5], and humanoid robots[6], have attracted considerable attention from an increasing number of scientists.
However, critical issues that limit the development and application of robots remain to be solved. Most current robots are composed of electromechanical systems. Several energy transformations occur from the available energy to the electricity required for the electromechanical systems, thus greatly decreasing the energy efficiency. As previously reported, traditional electromechanical systems have a low transformation efficiency (<30%) for mechanical work, leading to large heat losses[7]. In addition, most traditional robots based on electromechanical systems are made of metals, wires, and other hard materials. These artificial materials and structures mean that the robots lack intrinsic safety, flexibility, and adaptability in applications that require human–robot interaction.
Biological entities offer many functional advantages that are difficult to achieve using artificial materials. For example, most biological materials are soft and environmentally safe[8] for human–machine collaboration and integration. Furthermore , biological muscles can be directly driven by chemical energy ;therefore, as long as the appropriate nutrients are supplied in the growing environment, these biological muscles can convert chemical energy into mechanical work [9] at much higher efficiencies (50%) than those of synthetic non-living actuators[7,10]. Biological materials also possess functional environmental compatibility as well as self-repair and self-assembly capabilities. Moreover, biological materials have developed excellent smart sensing, intelligence systems, and actuation systems, which are difficult to replicate using artificial materials with the currently available technologies[11].
Therefore, a new type of robot can be developed by merging electromechanical systems with biological materials at various scales of molecules, cells, and tissues,in order to obtain desirable functions that integrate the attributes of living biological materials (e.g., high energy efficiency[10], high power-to-weight ratio[12], and large energy storage[8]) with those of non-living systems (e.g.,high accuracy[13], high strength, favorable repeatability, and controllability[14]) (Fig.1). Due to the advantages of a combined system, compared with living biological materials or non-living traditional robots based on electromechanical systems, developing this new generation of robots—called bio-bots, bio-hybrid robots, or bio-syncretic robots—has been a topic of great interest. Significant progress has been achieved in this area over the past decade.
《Fig. 1》
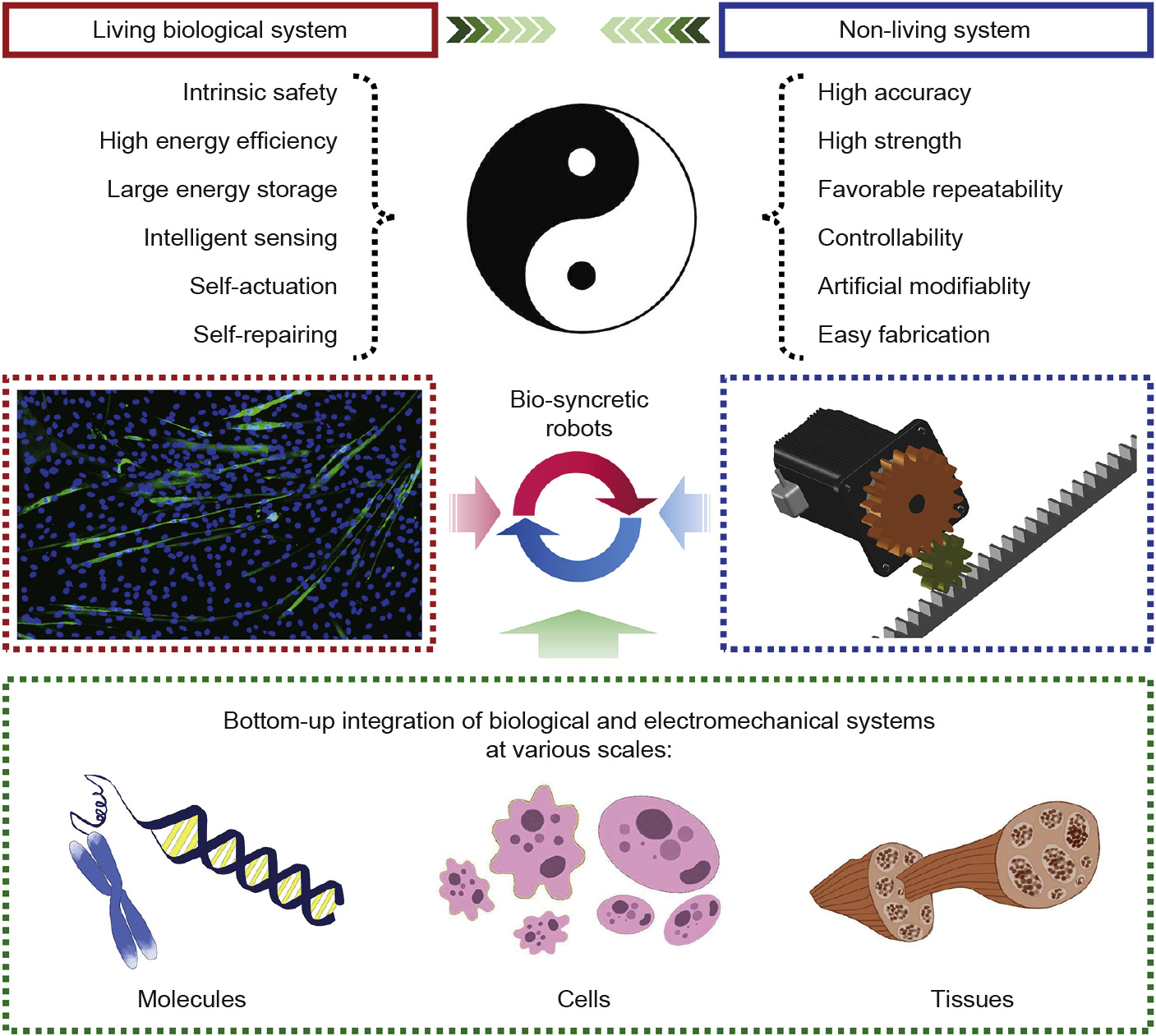
Fig.1.Bio-syncretic robots consisting of both living biological and non-living systems.
In this paper, we review existing studies relevant to bio-syncretic robots, including cardiomyocyte-actuated robots, skeletal muscle cell-based robots, and swimming cell-powered robots. We also summarize the development of bio-syncretic robots from various viewpoints. First, we review the performance development of biosyncretic robots. The capabilities of bio-syncretic robots have been promoted using various materials, fabrication methods, and control strategies. Second, we identify various relevant living biological materials, along with their corresponding characterization. These biological materials provide different properties, such as cellular force,size,and controllability. Third, we identify the non-living materials that are currently used in bio-syncretic robots. The properties and fabrication methods of these artificial materials determine not only the performance of the living biological materials,including differentiation, contractility, and survivability, but also the properties of the bio-syncretic robots,including velocity, force, and manipulation.Fourth, we review the control methods—including electrical stimulation,photic stimulation, temperature stimulation, and chemical stimulation, and magnetic stimulation—that are currently used in bio-syncretic robots, along with their corresponding features. Finally, we examine challenges facing the further development of bio-syncretic robots.
《2.An overview of the development of bio-syncretic robots》
2.An overview of the development of bio-syncretic robots
Over the past decade, many researchers have promoted the development of bio-syncretic robots. One current type of bio-syncretic robot with asymmetric structures can perform simple unidirectional movement actuated by the spontaneous contraction of cardiomyocytes [15]. Bio-syncretic robots with velocity control-lability have also been studied with controllable living biological materials. Furthermore, to enable bio-syncretic robots to execute certain functions, controllability of the movement velocity and direction has been developed. Details on the development of bio-syncretic robots based on muscle cells are listed in Table 1[15–31].
《Table 1》
Table 1 Development of bio-syncretic robots based on muscle cells
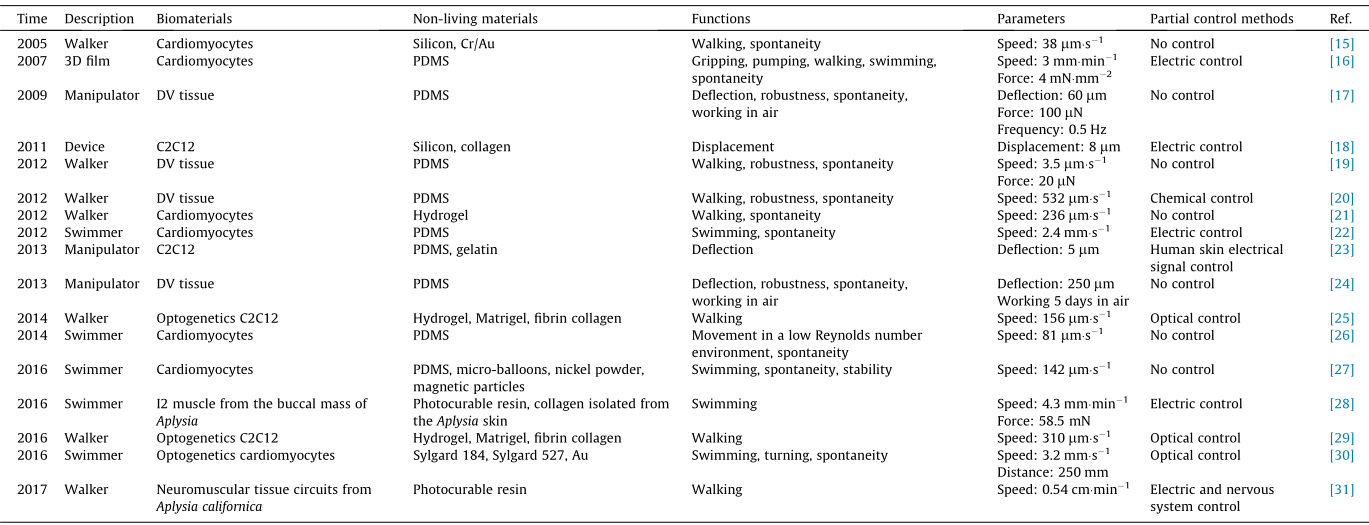
PDMS: polydimethylsiloxane; DV: dorsal vessel.
Bio-syncretic robots can implement spontaneous movement that is actuated by living spontaneously contractile bio-actuators, such as cardiomyocytes[15,21,26] and insect heart tissues (also called dorsal vessels (DVs)) [17,19,20]. Xi et al. [15] fabricated the first self-assembled walking bio-syncretic robot that can move autonomously; the movement of this robot was powered by the contractility of beating cardiomyocytes. This bio-syncretic robot was composed of a silicon backbone fabricated with single-crystal reactive etching, a connected chromium/ gold (Cr/Au) film fabricated using metallization processes, and a cardiomyocyte tissue growing on the metal film. The leg of the robot was 138 lm long, 40µm wide, and 20 nm/300 nm (Cr/Au) thick. By taking advantage of the cell growth inhibition of poly (N-isopropylacrylamide)(PNIPAAm), the cardiomyocytes were aligned on the patterned metal film. The contraction force of the aligned tissue was 14 mN.mm-2. After culturing for three days, the bio-syncretic robot was released by cooling the entire structure at room temperature in order to take advantage of the temperature response of PNIPAAm. The bio-syncretic robot was then able to walk automatically due to the actuation of the spontaneous contraction of the living cardiomyocyte tissue. The walker robot was able to move at a maximum velocity of 38 µm.s-1, with an average step frequency of 1.8 Hz.Akiyama et al.[19] fabricated a moving polypod bio-syncretic robot that can walk autonomously;this robot was driven by the spontaneous contraction of DV tissue at a wide range of temperatures.This bio-syncretic robot consisted of a polydimethylsiloxane (PDMS) structure that was fabricated using a casting method,and a DV tissue excised from an inchworm and then assembled onto the microstructure. The walker robot dimensions were 12.5 mm long,1.35 mm wide, and 0.2 mm thick.After 10 days of culturing, the micro-walker was able to move at an average velocity of 3.5µm·s-1; the contraction force of the DV tissue was 20µN.
Living biological materials with controllable contraction, such as cardiomyocytes[30] and engineered skeletal muscle tissues[25,29], have been used as bio-actuators to control the movement velocity of bio-syncretic robots.Based on the intrinsic and modified features of biological entities, different methods such as electric stimulation[22], photic stimulation[29,30], chemical stimulation[32,33], and magnetic stimulation [34,35] can be used to control bio-syncretic robots. For example, Feinberg et al.[16] fabricated a bio-syncretic robot consisting of engineered cardiomyocyte tissues and PDMS thin films. To promote the actuation performance by controlling the spatially ordered, two-dimensional (2D) myogenesis of the beating cells, extracellular matrix proteins (fibronectin) were used to pattern the cardiomyocytes on the thin films. The temperature response of PNIPAAm was used to release the films and form three-dimensional (3D) structures. Using an electric pulse (10V,10 ms pulse width) as a control, the centimeter-scale 3D structure can perform various functions, such as gripping, pumping, walking, and swimming (3 mm.min-1) with a contraction force of 4 mN.mm-2. Cvetkovic et al.[25] developed a bio-syncretic robot powered by engineered muscle tissue that can be controlled by electrical stimulation. To fabricate the robotic structure, stereolithographic 3D printing technology was used based on the geometric design of the robotic body and the material properties’analysis of the hydrogel. To promote the actuation force of the engineered skeletal muscle tissue, collagen I and fibrin extracellular matrix proteins and insulin-like growth factor 1 were used in the cell culturing. After the myoblasts differentiated to form the contractile myotube tissues, the bio-syncretic robot was able towalk with a maximum velocity of approximately 156 µm.s-1. The movement was actuated by electrical stimulation triggered by the contraction of cells in the muscle strip.Modeling and simulation were used to study the movement mechanism and the effects of different design parameters on the bio-syncretic robot.
Recently, some researchers have attempted to control the movement direction of a bio-syncretic robot with no other electromechanical mechanism[30,36,37]. For example,Park et al.[30] fabricated a bio-syncretic robot of an artificial ray by studying the inner structure of actual rays. The tissue-engineered artificial ray was able to swim and turn with an optical controlling stimulus. To form the biomimetic structure for this bio-syncretic robot, multilayer PDMS films with different concentrations were assembled with a metal skeleton,which improved the shape retention of the structure. To replicate the swimming performance of a ray, the muscle tissues on the fins were organized by patterning the structure surface using a micro-stamp method. Based on the muscle structure of an actual ray, the muscle circuits were designed and patterned with fibronectin. After culturing the engineered car-diomyocytes on the structure and releasing the bio-syncretic robot by dissolving the sacrificial dextran layer, the swimmer robot could be guided to swim and turn through an obstacle course by controlling the optical stimulation position on each fin.
《3.Living materials used for bio-syncretic robots》
3.Living materials used for bio-syncretic robots
To take advantage of the special features of biological entities,various living biological materials have been used to implement desirable functions, such as actuation[ 7,8,38–40], sensing[34,35], and supplying energy[41]. Popular biological materials used for the development of bio-syncretic robots are cardiomyocytes [15,16,21,22,26,27,30], skeletal muscle cells [18,25,29,42], insect DV tissues [17,19,20,23,33], flagellate swimming microorganisms [36,37,43–47], and others [11,28,31]. Each of these materials possesses suitable properties, such as size,force, controllability, and safety,for different applications.
《3.1.Cardiomyocytes》
3.1.Cardiomyocytes
Cardiomyocytes possess spontaneous contractility, which is caused by the electrical stimulation created by a sequence of ion fluxes through specialized channels in their membrane (sarcolemma) [48]. A single adult-cardiomyocyte is approximately 100µm long,and the length of heart cell sheets can range from millimeters to centimeters. Once the cardiomyocytes grow to touch each other, the electrical gap junctions enable synchronous contraction [7,49]. The contraction force of a single cardiomyocyte is at least 1µN [50–53], and cardiomyocyte clusters can generate contraction forces ranging from 1 to 4 kPa[16], which is comparable to actual cardiac muscle. The contraction force of cardiomyocytes is related to the concentration of the cells[54]. Moreover, to acquire more actuation force, cardiomyocytes can be engineered to form cell tissues with biocompatible materials, such as Matrigel and hydrogel[55–62]. In addition to the spontaneous contraction, the contraction frequency and force of the cardiomyocytes can be controlled by various external factors, such as electrical pulse stimulation[63,64], optical stimulation[30,65–67], and chemical stimuli[68–73]. Considering its size, a single cardiomyocyte can be used as an onboard actuator to power a microrobot, which is smaller than 100µm. For example, Williams et al.[26] developed a microscale self-propelled bio-syncretic swimmer that was able to swim in a low Reynolds number environment and was actuated by a spontaneous beating cardiomyocyte. To achieve the microscale bionic sperm robotic structure, a unique fabrication process was used. First, dry etching was used to carve the silicon model; the PDMS was then poured into the micro channels by capillary draw[74]. After curing, the model and PDMS structures were inundated with ethanol to facilitate the release of the filament from the channel. The PDMS microstructures were then manually released and transferred to a 35 mm Petri dish. To replicate the movement of a sperm,the cardiomyocytes were selectively seeded on the PDMS microstructure by selectively functionalizing the filaments with gelatin mask, fibronectin, and F127. Two to three days after seeding the cells, theswimmers could be propelled at a maximum velocity of 81µm. s-1. Fabricating a bio-syncretic robot with cardiomyocytes is convenient because cardiomyocytes can spontaneously beat with no external stimulation[25]. However, for the same reason,accurately controlling the timing and amplitude of the contraction, and thereby the movement of the bio-syncretic robot,is difficult[27].
《3.2.Skeletal muscles》
3.2.Skeletal muscles
Skeletal muscles can generate contraction forces under neural stimulation or external stimulation[75]. Therefore, electrical stimulation is used to control the contraction of engineered skeletal muscle tissues for bio-syncretic robots[76]. Skeletal muscle tissue may provide a more powerful force than cardiac tissue[18], with the contraction force of skeletal muscle cells being approximately 400µN[25,29]. In general, contractile myotubes are achieved by differentiating the myoblast (C2C12) with the induction of horse serum[77–79]. To improve the contraction force of biological materials, the contractility of engineered skeletal muscle tissues has been studied using various approaches including electrical stimulation[64,79–81], physical stimulation[82–85], optical stimulation and optogenetics[42,86,87], chemical stimulation[88], magnetic stimulation[89–91], and biological regulation[92]. These studies showed that the abovementioned external stimulation methods can increase the myotube differentiation rate, cell alignment, cellular force, and cell maturation. For example, Ahadian et al.[80] presented an interdigitated array of platinum(Pt) electrodes to promote engineered muscle tissues. To achieve 3D arrays of engineered muscle tissue, a synthetic hydrogel with grooves was fabricated on an electrode substrate. One day after electrical stimulation with a voltage of 6 V, a frequency of 1 Hz, and a duration of 10 ms, the myotube characteristics and gene expression were analyzed and quantified. The results showed that the engineered muscle tissues stimulated by the proposed electrode substrate demonstrated superior performance and maturation compared with those simulated by a conventional Pt wire electrode substrate.In particular, the engineered muscle tissue in the experimental group demonstrated a higher degree of C2C12 myotube alignment (approximately 80%) than the muscle tissue stimulated with Pt wires (approximately 65%). Moreover,higher amounts of C2C12 myotube coverage area, myotube length, muscle transcription factors, and protein biomarkers were found in the engineered muscle tissue that was stimulated with the proposed electrodes than in the tissue stimulated by the Pt wires. Due to the size, contraction force, and controllability of the engineered skeletal muscle cells, centimeter-scale robotic structures can be actuated by C2C12 cells [18,25,29]. However, mammalian muscle cells require a strictly controlled culturing environment[11]. To keep the cells alive, the culture conditions must be 37°C with a pH of 7.4 and 5% carbon dioxide in a sterile incubator. To maintain sufficient nutrients and the necessary liquid environment, the culture medium must be replaced every few days[20,93,94].
《3.3.DV tissues》
3.3.DV tissues
DV tissue is the alternative bio-actuator for bio-syncretic robots. These tissues can contract spontaneously and can be controlled by external stimulation; however, they do not require the strict culturing conditions that are necessary for living mammalian tissues[33]. In addition, DV tissue is more environmentally robust for the applications of bio-syncretic robots. As shown by previous reports, DV tissue can survive for more than 90 days without changing the culture medium[95] and can maintain its contractility in temperatures from 5 to 40°C[94,96]. Moreover,similar to mammalian skeletal muscle cells, DV tissues can contract spontaneously and meet the controllability requirement for bio-syncretic robots. Relevant studies have demonstrated that insect muscle cells can be controlled by an external electrical pulse[23,97]. A single DV tissue can reach dimensions of up to centimeter scale[20], and its contraction force is approximately 100µN[17,98]. Due to their size, contraction force, robustness, and controllability, insect muscle cells have been widely studied as a viable alternative bio-actuator to power bio-syncretic robots [19,20,24,32,94,97,99–101]. For example, Akiyama et al.[24] developed an atmospheric-operable bio-actuator powered by insect muscle cells packaged with medium. The bio-syncretic manipulator consisted of a micro-tweezer, a capsule, and living DV tissue. The micro-tweezer and the capsules were made of PDMS. As the executor,the micro-tweezer was used to manipulate objects and was powered by the contraction force of the DV tissue attached to it. The capsule was used to fix the micro-tweezer and store the culture medium (40µL) for the living tissue. To extend the maximum lifespan of the DV tissue, the medium was evaporated with paraffin. The gap between the tips of the tweezer could vary by approximately 250 µm under the actuation of the living DV tissue. When the bio-syncretic manipulator grasped a ring made of PDMS with a diameter of 250µm, the ring was deformed by 37µm in the vertical direction and 48µm in the lateral direction.Moreover,the proposed bio-syncretic manipulation robot was able to work for five days in air.
《3.4.Microorganisms》
3.4.Microorganisms
Microorganisms can move and respond to external stimulation,and can be used as bio-actuators for bio-syncretic robots[11]. Many types of microorganisms, such as flagellated bacterial species (e.g., Escherichia coli, Serratia marcescens, and Salmonella typhimurium), gliding bacterial species (e.g., Mycoplasma mobile), protozoa(e.g., Paramecium caudatum, Vorticella convallaria, and Tetrahymena pyriformis), and Tetrahymena pyriformis) algae (e.g.,Chlamydomonas reinhardtii), have been used to develop bio-syncretic robots[11,36]. These moving microorganisms can swim in a liquid environment or move on a substrate by themselves. The propelling force is provided by their bio-molecular motors, which consume simple nutrition (e.g.,glucose)[9,49] .In addition, the movement of a single microorganism or group of microorganisms can be steered using various control approaches based on the taxis response, which is a movement in response to environmental stimulation. A wide range of stimulation control approaches have been studied and utilized to control different types of microorganisms that are sensitive to various types of stimulation,which include chemotaxis(chemicals), magnetotaxis (magnetic field), galvanotaxis (electric field), phototaxis (light), thermotaxis (temperature), and aerotaxis(oxygen) [102]. Beyond the generally small size and accessible controllability of bio-syncretic robots that are based on microorganisms, the key advantage of using microorganisms as living biological actuators is that most can live in a wide range of environmental conditions. Some microorganisms can withstand high temperatures (more than 100°C), and some can survive in environments with pH values as low as 2 or as high as 11.5[103]. Because microorganisms possess so many advantages, including their small size, strong swimming ability, easy controllability, extensive survivability, and high energy efficiency, many researchers have developed microorganisms for various applications, such as detecting agents[104–109], manipulating micro-objects[36, 44–46, 110–112], and delivering drugs [102,109,113–115]. For example, Cho et al.[115] developed a biomedical bio-syncretic microrobot actuated by flag-ellate bacteria for delivering anti-cancer drugs and therapeutic bacteria. To form the polyethylene glycol (PEG) microbeads of the bio-syncretic microrobots,the PEG droplets were polymerized by ultraviolet (UV) radiation in a cross-junction microfluidic channel. To achieve effective movement of the bio-syncretic micro-robots powered by the living bacteria, the microbeads were selectively modified.In this process, the PEG microbeads were first half submerged in agarose gel based on the submerging property. Uncured PDMS was then poured on top of the agarose gel to create the other half of the surface. Next, the microbeads attached to the PDMS were dipped in poly-L-lysine (PLL) solution to modify the uncovered surface of the microbeads. Because of their hydrophilicity,the bacteria do not attach to the hydrophobic surface of the PEG material.Therefore,after the selective surface modification, the attenuated Salmonella typhimurium only attach to the PLL-modified hemisphere of the PEG microbeads. Under the actuation of the swimming bacteria, the selectively modified bio-syncretic robots showed an average velocity that was 12.33 and 7.40 times higher than those of the unmodified and completely modified bio-syncretic microrobots,respectively.
《4.Non-living materials and fabrication methods used for bio-syncretic robots》
4.Non-living materials and fabrication methods used for bio-syncretic robots
As an important part of bio-syncretic robots, non-living materials provide the structural support, growing environment, and attachment substrate for the living biological materials. Previous studies have shown that the mechanical properties of the non-living materials determine the robot performance,such as the float[27], deformation[25], and velocity[30]. Moreover, properties such as the microscopic structure, Young’s modulus, hydrophilicity, biocompatibility,and conductance affect the state of the living biological materials, such as the adherence [15,26,36,109,114–116], proliferation [29], differentiation [25, 59, 65, 80, 82, 117–119], alignment [16,22,30,120], and contractility [63,73,82,84,121–123]. For example, Bhana et al.[124] demonstrated the influence of substrate stiffness on the phenotype of heart cells by characterizing the influence of the substrate stiffness on the cardiomyocyte phenotype and functional properties. Collagen-modified polyacry-lamide substrates with different Young’s moduli (3,22,50,and 144 kPa) and collagen-coated glass coverslips (infinite stiffness) were used to culture cardiomyocytes from neonatal rats based on the elasticity of the native rat heart tissue(ranging from 4 to 46.2 kPa). After culturing for 120 h, the cells on the intermediate stiffness substrates, which were comparable to those of the native adult rat myocardium (22–50 kPa), displayed optimal cellular morphology, function, and differentiation, such as well-developed striations, reasonable excitation threshold, superior elongation, and high contraction force.
Common non-living materials used in bio-syncretic robots include structural materials (e.g.,PDMS [16, 17, 19, 20, 22, 24,26,27,30], hydrogel[21,25,29], resin materials[28,36,46,114], and SU-8 [125]) and growing materials (e.g., Matrigel [25], fibrinogen [78,84,85,126,127], fibronectin[16,22,30], and collagen[60,128]). Different materials possess different mechanical and biological properties, which require correspondingly different fabrication methods. PDMS is a popular non-living material for bio-syncretic robots because its stiffness can be tuned to the optimal substrate stiffness for muscle tissue (approximately 10 kPa[25]) and because of its many fabrication methods. Commonly used PDMS structures are cured from the solution mixed in 10:1 ratio of the base and the curing agent; the Young’s modulus of the cured structures changes with varying ratios, heating temperatures, and curing times[129,130]. In general,structures made of PDMS are manufactured by casting with molds[17,19,20,24,26], spin-coating on a surface[27,30], cutting the films[16,22] or 3D printing [73]. Moreover, the biocompatibility and hydrophilicity of PDMS can be adjusted by modifying the growing materials or by plasma treatment[54]. For example, Holley et al.[27] fabricated a type of bio-syncretic micro-swimmer actuated by living cardiomyocytes on PDMS films using the fin-based propulsion mechanism. This bio-syncretic robot was able to achieve self-stabilizing swimming by maintaining its submersion depth,pitch, and roll without external interven-tion. The robot was composed of a triangular head made from two composite PDMS materials and a thin PDMS tail with many living cardiomyocytes. Under the actuation of the contraction force of the beating PDMS film actuator, the bio-robot was able to stably swimat a maximum velocity of 142 μm·s-1,even withstanding a disturbance within a certain angle.
Biocompatible hydrogel is an alternative material for the development of bio-syncretic robots. With the development of 3D stereolithographic printing technology, photo polymer hydrogel liquid can be selectively cured in individual layers using a UV laser or another light source according to the designed 3D structure[131,132]. To meet the requirements of the living biological materials, the Young’s modulus can be regulated by changing the molecular structure of the polymers and the cross-linking agent. The chemical properties can be spatially modified using a 3D printer[133]. Moreover,the porousness of the hydrogel can promote the survival of the living biological materials growing on or in the hydrogel by providing sufficient nutriment and the necessary gas environment. In addition, the microstructure of hydrogel materials can contribute to the proliferation and differentiation of the cells[134,135]. Given the advantages of hydrogel materials, a great deal of research has attempted to use these materials to fabricate the structures of bio-syncretic robots [21,25,29,37,131]. For example, Chan et al.[21] fabricated a locomotive bio-syncretic robot called a “bio-bot,”which was made of hydrogel materials and cardiomyocytes, and was constructed using a 3D stereolithographic printer. The bio-bot consisted of a"tail”that served as the actuator to provide power for the bio-bot and a “leg”that served as the main body of the bio-bot in order to define the asymmetric structure for locomotion.Living cardiomyocytes were seeded on the tail and spontaneously deformed the tail to provide the propelling force of the bio-bot.Under the actuation force of the beating cells ,the bio-bot was able to move at a maximum velocity of 236 mm·s-1,with a mean beating frequency of 1.5 Hz.
Combining multiple materials, such as stiff materials, soft materials,and conductive materials,may be helpful for achieving key robot functions, including sensing,intelligence, and actuation. Therefore, multi-material 3D fabrication technology has been studied by researchers. For example , Lind et al.[73] developed a device made of multiple non-living materials and heart cells that was constructed using a multimaterial 3D printer. The non-living structure consisted of six functional inks, including piezoresistive, high-conductance, and biocompatible soft materials,according to the requirements of the device. The soft structure of the device was actuated by the living cells, without the non-living materials influencing the living biological materials. Therefore, multi-material 3D printing technology can be used in the fabrication of bio-syncretic robots in the future. To achieve multifunctional bio-syncretic robots, many new materials and fabrication methods, including intelligent materials and four-dimensional (4D) printing technology,should be studied and used.
《5.Methods for the control of bio-syncretic robots》
5.Methods for the control of bio-syncretic robots
Controllability is one of the main attributes needed in order for bio-syncretic robots to perform tasks—such as transportation, manipulation, and navigation—under human control or as part of a self-autonomous system. In general, bio-syncretic robots can be controlled by a wide variety of control approaches based on the intrinsic program of the living biological materials, through integrated sensing and control pathways or an external control force.
Control approaches based on the intrinsic program of the living biological materials utilize the special properties of the biological entities. Many living biological cells and tissues can respond to external factors, such as mechanical force and strain[136–138], chemical gradients, electrical stimulation[22,73,80], optical stimulation[29,30,66,86], and magnetic fields[34,35,90]. Neural stimulation is one of the major factors in controlling the contraction of muscle cells and tissues in animal bodies[31,139,140]. Neural signals can be simulated by electrical stimulation to recreate the excitation–contraction process of muscle cells or tissues [75,141]. Therefore, many researchers have used electrical stimulation to improve the development of bio-syncretic robots in recent decades. This form of stimulation can be used to optimize the stateof living biological materials; promote cell proliferation,maturation, and differentiation; control the contraction (frequency and force) of muscle cells or tissues; and guide the movement direction of bacteria. Previous studies have demonstrated that cardiomy-ocytes can respond to electrical fields, leading to optimal cellular morphology and function[124]. In addition, the application of electrical stimulation can induce synchronous contraction of cardiac myocytes after more than eight days of culture[142]. For example, Nawroth et al.[22] reverse-engineered an electrically controlled bio-syncretic robot called a "biomimetic medusoid.”This swimmer was composed of a PDMS film and a sheet of living cardiomyocytes, which provided the propelling force for the bio-syncretic robot. To replicate the swimming mode of native jellyfish, the proposed bio-syncretic swimmers were designed using computer simulations and experiments. The design aimed to match the major swimming motions of jellyfish by quantitatively mimicking the structural design, stroke kinematics, and animal–fluid interactions. Under the actuation of living biological materials, the artificial medusoids were able to swim in a manner similar to a jellyfish in a liquid environment, and their velocity could be controlled by external electrical pulse stimulation. Under electrical pulses of 1 Hz,2.5 V ·cm-1, and 10 ms, the bio-syncretic swimmer could move with a maximum velocity of 2.4 mm·s-1. Although electrical stimulation has been widely used to promote and control the behavior of the living biological materials in bio-syncretic robots with high temporal resolution, the spatial resolution of electrical stimulation cannot be accurately controlled due to the propagation of the action potentials in a liquid environment. The spatial resolution depends only on the gap between the electrodes and the biological materials [63]. This issue can be solved by integrating the stimulation electrodes into the substrate, or by requiring the stimulation electrodes to be attached to the muscle cells or tissues. However, this approach requires the integration of soft electrodes and may damage the living biological materials.
Optical stimulation has also been widely used in bio-syncretic robots and offers the advantages of control location precision and non-invasion. Optical control can be directly used to guide phototropic living biological materials, such as algae and photosyn-thetic bacteria. We have previously proposed a bio-syncretic tweezer system to flexibly and accurately manipulate micro-objects using the swimming force of local light-induced high-concentration microorganisms[37]. In that study, living swimming Pandorina and Chlamydomonas reinhardtii were used to provide the propelling force of the bio-syncretic tweezer, and a light source (500 nm wavelength) was focused and controlled to guide the movement of the swimming microorganisms. Two different manipulation modes were implemented: a light-spot-induced mode and a geometric shape-induced mode. In the first manipulation mode, the micro-objects could be moved in the 2D plane by the bio-actuation controlled by the focused light spot; in the second manipulation mode, the micro-object shapes could be actuated to rotate due to the impact force of the group of swimming microorganisms. The experiment showed that the micro-objectscould be actuated to move at a maximum velocity of 7.59µm · s-1 and to rotate at a maximum angular rate of 0.032 rad · s-1.
In addition to heliotropic living biological materials that can easily be controlled using optical stimulation,other biological cells and tissues,such as cardiomyocytes and skeletal muscle cells, can be enhanced to become light sensitive using optogenetics. Optogenetics permits the user-defined spatiotemporal activation of muscle actuators by genetically programming the cells to express light-sensitive proteins[65,86,87]. Light can then be accurately focused onto different regions of the muscle cells or tissues in order to selectively control the contraction of the living biological materials. A previous experiment showed that the contractile pattern and magnitude of the skeletal muscle stimulated by optics (blue light with intensity of 0.12 mW mm-2 and 100 ms pulse width) were almost the same as those of the muscle motivated by electrical stimulation (0.8 V mm-1 and 100 ms pulse width)[87]. Moreover, most phototactic cells,muscle cells, and tissues can respond to optical stimulation within short periods of time (i.e.,dozens of milliseconds) [36,86,87]. Using optogenetics and optical stimulation, many researchers have achieved the simple optical control of bio-syncretic robots actuated by living cardiomy-ocytes[30,65] and skeletal muscle cells[29,86,143]. For example,Raman et al.[29] developed a bio-syncretic robot, bio-bot, actuated by skeletal muscle cell tissue controlled by noninvasive optical stimulation. This bio-syncretic robot was composed of a hydrogel structure and muscle tissue containing many differentiated myo-tubes. The hydrogel skeleton structure of the bio-syncretic robot was fabricated with a 3D printer. To achieve a controllable bio-actuator, the existing lentiviral transduction protocol was used to engineer C2C12 murine myoblast cells with a mutated variant of the blue light-sensitive ion channel , Channelrhodopsin-2(ChR2). The cells were mixed with Matrigel basement membrane, fibrinogen, and thrombin to form the 3D muscle tissue.When optical stimulation was used, the skeletal muscle-powered actuator couldgenerate up to 300µN (0.56 kPa) of active tensile force. When skeletal muscle tissue was assembled into a 3D printed flexibleskeleton, the bio-syncretic robot could move at a velocity of 310µm · s-1 and demonstrated 2D rotational steering at an angular rate of 2°s-1 using optical stimulation.
Although optical stimulation has been extensively studied and used for the development of bio-syncretic robots due to its high spatiotemporal resolution,some drawbacks limit the application of optical control. For example, living biological materials may be damaged by the heat from the focused light being used for stimulation [144]; moreover, some light sources, such as UV, may damage the DNAs and proteins in living biological materials, including microorganisms and cells. Therefore, optical stimulation with certain special light sources should be limited to a short exposure time when used to control bio-syncretic robots[145]. Furthermore, the effective penetration depth of light (470 nm wavelength) into biological tissues is less than 740 μm[146,147]. Therefore, the control light cannot penetrate through opaque screens such as the human body.
Chemical stimulation has been widely studied as another control approach for the development of bio-syncretic robots. Because disease cells and tissues can change the microenvironment around a nidus in the body[109], bio-syncretic robots used for in vivo therapy may be able to achieve automatic control using chemical responses. To study the control of bio-syncretic robots using chemical stimulation, many drugs have been used to control the magnitude and frequency of the contraction in muscle cells and tissues[71] and cardiomyocytes[148], and the swimming velocity and direction of bacteria[109,114]. For example, Park et al. [109] proposed and investigated a bio-syncretic robot “bacteriobot”to achieve active drug delivery, active tumor targeting, bacteria-mediated tumor diagnosis,and therapy. The microrobots were actuated by selectively adhered flagellar bacteria (Salmonella typhimurium) on the polystyrene (PS) microbeads, which were selectively patterned with bovine serum albumin (BSA). The results showed that many bacteria could be selectively attached on only the unpatterned surface of the PS microbeads. The bio-syncretic robots were able to sense the chemical gradient in the microfluidic chamber consisting of two different drugs (bacterial chemoattractant (L-aspartic acid) and chemorepellent (NiSO4)). Most bio-syncretic robots automatically guided the swimming direction toward L-aspartic acid using the actuation force of the living bacteria based on chemical stimulation. However, the low spatiotemporal resolution and potential toxic effects of chemical stimulation may limit its application in the control of bio-syncretic robots. Moreover, if a bio-hybrid device is located far away from the chemical source, the chemical concentration could be weakened during the diffusion process, decreasing the control effect.
Magnetic control methods offer the advantages of being non-toxic, non-contact, and highly penetrating techniques. These methods have been used to control the behavior of living biological materials such as protein molecules[35], cells, and nematodes[34], as well as the direction and velocity of strains of magnetotactic bacteria[102,149–152]. For example, Martel et al.[152] demonstrated that the displacement speed, direction, and behavior of a single magnetotactic bacterium could be controlled using a closed-loop computer system. Moreover, external force control can be achieved using a remote magnetic field to control micronano magnetic particles embedded in bio-syncretic robots in order to control the velocity of bio-syncretic robots and assist with the actuation of biological materials[153,154]. In addition , a remote magnetic field can steer the movement direction of bio-syncretic robots[116,155]. For example, Carlsen et al.[116] demonstrated a remote magnetic field control method to control the movement of a bio-syncretic robot and reduce the stochasticity of the motion. The proposed bio-syncretic micro-swimmers were made of many Serratia marcescens bacteria adhered onto a superparamagnetic microparticle (6 μm in diameter). The living bacteria provided the propelling force for actuating the bio-syncretic robot, and themagnetic microparticle was used to steer the bio-syncretic robots under the action of a remote magnetic field. By researching the relationship between the magnetic control parameters and the motion of the micro-swimmers, the control strategy could be optimized. A weak magnetic field (10 mT) was used to control the micro-swimmers along 2D trajectories at a maximum speed of7.3µm s-1. However, magnetic control methods require a large, complicated external control algorithm.
Although various control methods have been studied and used to promote the performance of bio-syncretic robots, the requirements of each control approach limit the application of the current bio-syncretic robots. Therefore, in order to control bio-syncretic robots in multiple work environments, new types of control stimulation approaches may be needed with novel action mechanisms and tools that involve both engineering and biology.
《6.Challenges in the development of bio-syncretic robots》
6.Challenges in the development of bio-syncretic robots
The development of bio-syncretic robots has been greatly promoted by studies in various fields, including micro-electromechanical systems (MEMSs), micro-/nano- fabrication, biology, and pharmacy. The early integration of biological entities with non-living materials has already been realized. Previous studies have presented bio-syncretic robots with the functions of simple movement,turning, and manipulation, powered by living biological materials. However, many important challenges, which may prevent the further development of bio-syncretic robots, must be considered and studied in the future. These potential challenges are listed below.
《6.1.Lack of bio-syncretic sensing and intelligence for the development of bio-syncretic robots》
6.1.Lack of bio-syncretic sensing and intelligence for the development of bio-syncretic robots
Sensing, intelligence, and actuation are the key functions of robots, and future bio-syncretic robots should incorporate these three elements. However, most of the current work on developing bio-syncretic robots is focused only on movement actuated by living biological materials. Few studies have considered the process of information acquisition using biological sensing capabilities or intelligent processing using the natural functions of living materials. Therefore, based on the same principle of utilizing living biological materials, such as cardiomyocytes and skeletal muscle cells, in the development of bio-actuation, bio-syncretic sensing and intelligence using living materials should be thoroughly investigated. In the future, a bio-syncretic robot will possess sensitive perception, intelligent response, and efficient actuation capabilities.
《6.2.The living biological materials of bio-syncretic robots》
6.2.The living biological materials of bio-syncretic robots
Living biological materials are a basic part of bio-syncretic robots, and are used to execute the main functions, such as actuation and sensing. The properties of the living materials determine the performance of bio-syncretic robots. However, obtaining living biological cells or tissues for bio-syncretic robots can be difficult. For example,most of the cardiomyocytes used for biological actuation are extracted from the hearts of neonatal rats. Therefore, the amount of living cardiomyocytes depends on the number of available rats. The facial pits of snakes are temperature sensitive and could be used in the sensing systems of bio-syncretic robots in the future. However, each snake has only two facial pits, and the pits are easily damaged during the extraction process. To achieve multipotency of bio-syncretic robots, such as smell, memory,and learning, new living biological materials and technologies should be studied and used. Moreover, biomaterials with powers such as actuation force and sensitivity need to be studied with new tools, such as biological integration and genetic engineering,for the development of bio-syncretic robots.
《6.3.Long-term maintenance and supply of energy and nutrients for living materials in bio-syncretic robots》
6.3.Long-term maintenance and supply of energy and nutrients for living materials in bio-syncretic robots
Most living biological entities are wet materials that need to be soaked in appropriate culture media in order to maintain their bioactivity, thus limiting the application of bio-syncretic robots in other environments. When bio-syncretic robots are used in air, the temperature, nutrition, gas, and sterility of the environment must be maintained within narrow condition-ranges. In natural biological bodies, the skin and circulation system provide protection and maintenance for the tissues and organs.
However, obtaining smart materials similar to skin and fabricating artificial blood capillaries is difficult in bio-syncretic robots. In addition, the heat generated by metabolism needs to be extracted. Therefore,new materials for the structure and culture environment, and the corresponding fabrication technologies—such as smart biomaterials, 4D printing technology, and constant-temperature approaches—urgently need to be developed for the further development and application of bio-syncretic robots.
《6.4.The control of bio-syncretic robots》
6.4.The control of bio-syncretic robots
The controllability of robots is one of the main evaluation indicators, and many research groups have implemented simple control of bio-syncretic robots using optics, electricity,and chemistry. However, some factors still limit the existing control approaches. For example, electrical stimulation using action potential propagation has a poor spatial resolution; electrical stimulation using contact electrodes may damage the biological materials; optical control requires a transparent environment; chemical control has a low spatiotemporal resolution because of diffusivity;and magnetic control requires a complicated external equipment and computer algorithms. Therefore, universal control methods that can be used in various work environments need to be investigated.
《6.5.The information interface,acquisition,and processing of bio-syncretic robots》
6.5.The information interface,acquisition,and processing of bio-syncretic robots
Information technology, including information acquisition, transmission,and processing, is the determinant of intelligent robots. The information acquired by the information acquisition modules should be nondestructively transmitted to the intelligent module to be processed and recorded . Next, the output information should be used to control the execution module. Information inter-face technology is the critical factor for intelligent robots. However,few of the current studies have considered information issues. Introducing information technology may improve the development of intelligent bio-syncretic robots. In addition,the integration of the information module, sensing part,and execution unit needs to be studied for the further development of bio-syncretic robots.
《7.Conclusion》
7.Conclusion
Bio-syncretic robots, which offer the advantages of both living biological materials and non-living systems, may be a potential development trend due to their high energy efficiency, intrinsic safety,and high sensitivity. This review described the recent development of bio-syncretic robots based on their functions, living biological materials, non-living materials, and control methods. The development challenges facing bio-syncretic robots were also discussed from various viewpoints, including sensing and intelligence, living and non-living materials, control approaches, and information technology. This review mentioned only some of the relevant studies on bio-syncretic robots; in addition, studies in many other fields, including cell culture, tissue engineering, optogenetics, micro-fabrication, 3D printing, and MEMSs, have greatly contributed to the development of bio-syncretic robots. Exploring the opportunities and overcoming the development challenges of bio-syncretic robots requires concerted efforts in different research fields, including robotics, mechanics, biology,pharmacy, and chemistry. Although most current bio-syncretic robots have magnitudes of millimeters or microns, micro bio-syncretic robots that are actuated by living cells have some advantages when compared with traditional microrobots. For example, cardiomyocytes have the capability for self-actuation because they consume the environment’s chemical energy; this may lay the foundation for resolving the challenges of energy supply and control for microrobots in special (e.g.,in vivo) working environments. In the future, bio-syncretic robots may possess multiple features, such as intrinsic safety, high-sensitivity sensing, rapid information processing, high intelligence, high-efficiency execution, and self-repairing capabilities, in order to serve people in various fields.
《Acknowledgements》
Acknowledgements
This work was supported by the National Natural Science Foundation of China (61673372, 61522312, 91748212, and 61433017), the Key Research Program of Frontier Sciences, CAS (QYZDB-SSW-JSC008), and the CAS/ SAFEA International Partnership Program for Creative Research Teams.
《Compliance with ethics guidelines》
Compliance with ethics guidelines
Chuang Zhang, Wenxue Wang,Ning Xi, Yuechao Wang, and Lianqing Liu declare that they have no conflict of interest or financial conflicts to disclose.











 京公网安备 11010502051620号
京公网安备 11010502051620号




