

《1. Introduction》
1. Introduction
Over the past decade, multiple global navigation satellite systems (GNSSs) have emerged as a means for ubiquitous positioning and timing. The International GNSS Service (IGS) [1] is a service of the International Association of Geodesy (IAG), which was founded in 1994. According to the terms of reference given in Ref. [2], the mission of the IGS is to provide “the highest-quality GNSS data, products, and services in support of the terrestrial reference frame; Earth observation and research; positioning, navigation, and timing (PNT); and other applications that benefit the scientific community and society.” The core products of the IGS are precise satellite orbit and clock parameters for the GNSSs Global Positioning System (GPS) and GLONASS computed by the IGS analysis centers (ACs), which are input for the IGS combined orbit and clock products that are freely available at the IGS data centers.
In order to fulfill the IGS mission for the emerging GNSSs BeiDou and Galileo, the Japanese Quasi-Zenith Satellite System (QZSS), and the Indian Regional Navigation Satellite System (IRNSS), also known as Navigation with Indian Constellation (NavIC), the IGS multi-GNSS working group initiated the MultiGNSS Experiment (MGEX) [3] in 2012, which was renamed as the Multi-GNSS Pilot Project in 2016. MGEX consists of a global multi-GNSS tracking network of 247 stations (as of fall 2018), data centers, and ACs generating multi-GNSS orbit and clock products. A list of these ACs and the constellations covered by their products is given in Table 1 [4–8]. Three ACs cover the full range of global systems and five ACs generate products for QZSS. Center for Orbit Determination in Europe (CODE) and German Research Centre for Geosciences (GFZ) products are limited to BeiDou-2, as the number of IGS stations tracking BeiDou-3 is rather limited. Wuhan University (WHU) is the only AC providing BeiDou-3 orbit and clock products based on additional non-IGS stations, starting in 2019. No IRNSS products are provided due to the lack of dualfrequency tracking data. More details about MGEX and the products of the MGEX ACs can be found in Refs. [9–15] and in the references listed in Table 1 [4–8].
《Table 1》
Table 1 List of MGEX ACs and GNSS constellations included in their products.

BDS: BeiDou Navigation Satellite System.
Section 2 of this article discusses the consistency of the MGEX orbit products in terms of three-dimensional (3D) root mean square (RMS) orbit differences between individual ACs as well as satellite laser ranging (SLR) residuals. Satellite clock RMS differences are analyzed in Section 3, and Section 4 utilizes the concept of the signal-in-space range error (SISRE) as a measure for the combined orbit and clock consistency.
《2. Orbit consistency》
2. Orbit consistency
The consistency of GNSS satellite orbits can be evaluated by orbit comparisons between the solutions of different ACs. In the following, monthly 3D RMS values are used to study the consistency of the MGEX orbit products for the time period from 2015 until the middle of 2018. Fig. 1 shows these RMS values for all combinations of MGEX ACs providing orbits for the European GNSS Galileo. In the beginning of 2015, the consistency was on the 15–35 cm level. In subsequent years, the RMS values improved by a factor of two to three. The best agreement of about 5 cm in recent months has been achieved for the comparison of GFZ and WHU.
《Fig. 1》
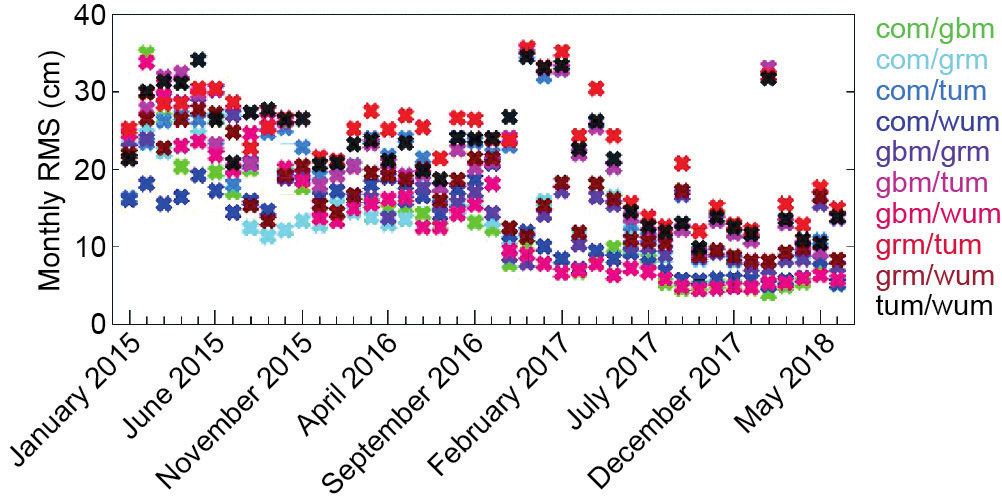
Fig. 1. Monthly RMS values of Galileo orbit comparisons between all combinations of MGEX ACs.
In the early years, the largest error source was solar radiation pressure modeling. As no detailed information on the Galileo satellites was available, the ACs inherited the models they were already using for GPS, such as the empirical CODE orbit model (ECOM) [16]. As these approaches were not appropriate for the stretched body shape of the Galileo satellites [12], more sophisticated models were developed, such as ECOM-2 [17] and a priori box-wing models [18,19], which significantly reduced systematic errors and improved orbit quality.
Further improvements in consistency are attributed to the antenna phase center model. In the beginning, conventional phase center offsets (PCOs) were used [20] and phase center variations (PCVs) were ignored. In 2016, GFZ and the German Aerospace Center (DLR) estimated PCOs for the Galileo in-orbit validation (IOV) and full operational capability (FOC) satellites [21]. These have been included in the IGS antenna model igs08.atx [22] since GPS week 1915, as well as in early releases of the newer model igs14.atx. Starting with GPS weeks 1972 and 1986, PCO and PCV chamber calibrations provided by Ref. [23] have been included in igs14.atx for Galileo IOV and FOC, respectively.
Compared with the rest of the constellation, notably larger orbit differences are present for the Galileo FOC satellites in eccentric orbit (E201/E202) for small absolute values of the elevation of the Sun above the orbital plane (β-angle) for dedicated ACs. These discrepancies might be attributable to differences in the attitude modeling of these satellites.
The comparisons for the Chinese BeiDou-2 system in Fig. 2 are limited to satellites in inclined geo-synchronous orbit (IGSO) and medium Earth orbit (MEO). Satellites in geo-stationary Earth orbit(GEO) are not considered, as they are only processed by two MGEX ACs. The BeiDou-2 GEO orbit consistency between GFZ and WHU is on the 2–4 m level. For MEO and IGSO satellites, only a small improvement over time can be seen in Fig. 2. This might be attributable to the lack of satellite metadata and to the fact that fewer stations track BeiDou-2 as compared with Galileo. The best agreement of about 15 cm is achieved between GFZ and WHU, whereas the comparisons with CODE are worse by a factor of two. Group delay variations [24] are a critical issue for BeiDou-2 data processing, and must be considered for IGSO and MEO satellites.
《Fig. 2》

Fig. 2. Monthly RMS values of BeiDou-2 MEO and IGSO comparisons between all combinations of MGEX ACs.
Even larger differences can be seen for individual satellites during the eclipse periods. BeiDou-2 MEO and IGSO satellites usually enter orbit-normal (ON) mode attitude for |β |<4° [20]. According to Ref. [25] several BeiDou-2 satellites do not enter ON mode anymore. Fig. 3 shows the cross-track orbit differences between GFZ and WHU for the BeiDou-2 MEO satellite C015, which has not entered ON mode since October 2016. Differences of up to ±80 cm occur as soon as the β-angle is within ±4°, due to different attitude modeling by both ACs. Consistent attitude modeling is particularly important for orbit combination and the users of undifferenced GNSS observations such as precise point positioning (PPP) [26].
《Fig. 3》

Fig. 3. Cross-track orbit differences between GFZ and WHU for the BeiDou-2 MEO satellite C015 and elevation of the Sun above the orbital plane β. The horizontal green lines indicate β = ±4°.
Table 2 summarizes the orbit consistency of the MGEX ACs for the four global systems—GPS, GLONASS, Galileo, and BeiDou-2—as well as for the regional system QZSS, for the first half of 2018. Epochs with gross outliers exceeding 1 m have been excluded. With a few centimeters, the GPS orbits have the highest consistency in terms of 3D RMS, followed by GLONASS. Due to the recent improvements discussed above, Galileo is only slightly worse than GLONASS, which has been processed by the IGS for the past 20 years. The BeiDou-2 consistency is on the few-decimeter level, whereas 3D RMS values of up to 80 cm occur for QZSS. The latter are partly attributed to solar radiation pressure modeling issues during the ON mode of QZS-1 [27], resulting in increased orbit differences.
The right part of Table 2 provides the average RMS values of SLR residuals obtained from SLR observations provided by the International Laser Ranging Service (ILRS) [28]. Station coordinates were fixed to the 33rd annual Second Language Research Forum (SLRF2014) [29] and outliers exceeding 50 cm were excluded. Due to the orbit height of the GNSS satellites, SLR mainly evaluates the radial orbit accuracy. Therefore, the radial orbit comparison RMS values are also given in Table 2. GPS cannot currently be observed by SLR, as the only two GPS satellites with SLR retro reflectors are no longer part of the active constellation. More details on the SLR tracking of GNSS satellites and on historic GPS SLR results are given in Ref. [30]. On the other hand, all GLONASS, Galileo, BeiDou, and QZSS satellites are equipped with laser retro reflectors. However, not all of them are tracked by the ILRS on a regular basis.
《Table 2》
Table 2 Consistency of MGEX GNSS satellite orbits in the first half of 2018.

For GLONASS, the RMS of the SLR residuals is on the 4 cm level with biases of generally less than 1 cm. With values of about 5 cm, the RMS residuals of Galileo are slightly higher and partly include systematic biases on the level of a few centimeters. These biases might be attributed to the neglect of Earth radiation pressure [31] and antenna thrust [32], which mainly affect the radial component. The BeiDou-2 SLR RMS values are between 6 and 8 cm, with a slightly β-dependent pattern for the IGSO satellites. For QZSS, SLR residual RMS values of up to 30 cm occur with a pronounced β-dependency for several ACs. These β-dependent SLR residuals of BeiDou-2 IGSO satellites and QZSS are related to solar radiation pressure mismodeling, and were also present in the early Galileo products using ECOM [12]. Due to these modeling issues, QZSS is the only system in which the accuracy of one particular solution (5 cm SLR RMS for Japan Aerospace Exploration Agency (JAXA)) is better than the consistency with other solutions (smallest radial RMS of 10 cm).
Fig. 4 illustrates the solar radiation pressure-related effects for QZS-1, the first satellite of the Japanese QZSS, which was launched in 2010. SLR residuals are plotted versus the Sun elongation, ε. Whereas the SLR residuals of JAXA do not exhibit a dependency on ε, the Technical University of Munich (TUM) orbits show a clear ε-dependent pattern that is responsible for increased RMS values.
《Fig. 4》

Fig. 4. SLR residuals of QZS-1 for two MGEX ACs. The Sun elongation is denoted by ε.
《3. Clock consistency》
3. Clock consistency
For simultaneous estimation of satellite and receiver clocks in a global GNSS solution, an additional datum constraint has to be applied. As a minimum constraint, the clock estimates of one station or satellite can be fixed, or a zero-mean condition for an ensemble of clocks can be applied. Common approaches include fixing the station clock of a receiver at a timing laboratory connected to a highly stable clock, a zero-mean condition for an ensemble of ground clocks, or a zero-mean condition for all or selected satellite clocks. As some of these approaches introduce a dependency on the a priori clocks, an additional alignment to, for example, broadcast clocks is performed by several ACs.
As the estimated satellite clocks refer to the antenna phase center, the PCOs must be considered for a clock comparison, particularly if different PCOs are used by the ACs. The latest release of the IGS antenna phase center model, called igs14.atx [33], contains estimated PCOs for GPS [34] and GLONASS [35], chamber calibrations for Galileo [23], and conventional PCOs for BeiDou [20]. However, CODE still uses the estimates of Ref. [21] for Galileo, which were included in earlier releases of igs14.atx. For BeiDou, CODE uses the conventional MGEX PCOs included in igs14.atx, whereas GFZ uses the offsets of Ref. [36] and WHU uses its own estimates, documented in Ref. [8].
As an example, Fig. 5 illustrates the clock differences of the Galileo constellation between CODE and GFZ for January 2018. The raw differences in Fig. 5(a) show a systematic bias with a mean value of about –2 m and peak-to-peak variations of 3.3 m. As the datum constraint is applied on a daily basis, daily biases are removed for Fig. 5(b), resulting in an RMS of 9 cm. If an epochwise bias is adjusted, the RMS drops down to 5 cm, as shown in Fig. 5(c). Only this value is relevant when assessing the consistency of different clock solutions for positioning applications, as receiver clock offsets are estimated every epoch that can absorb the mean epoch-to-epoch difference of the satellite clock offsets.
《Fig. 5》

Fig. 5. Galileo clock differences between CODE and GFZ for January 2018. (a) Raw clock differences; (b) daily bias adjusted; (c) epoch-wise bias adjusted.
For GPS, the biases between the various AC clock solutions are generally on the level of several decimeters, although biases of almost zero as well as biases of a few meters occur. The biases for the other constellations are larger and can reach up to several meters for Galileo, up to 12 m for GLONASS, and even up to 25 m for BeiDou-2 MEO and IGSO satellites. However, clock differences of up to several hundreds of meters are possible for individual days, ACs, and constellations.
The clock RMS values after removing a daily satellite-specific bias and a constellation mean per epoch for all AC combinations are shown in Fig. 6. The analysis covers the period from January until June 2018, and a fixed outlier limit of 1 m has been applied. For Centre National d’Etudes Spatiales (CNES)/Collecte Localisation Satellites (CLS), the GLONASS satellite R14 has been excluded until 17 February 2018, due to differences on the level of several meters. GPS shows the highest consistency of about 2 cm, with only small differences between individual ACs. The clock RMS ranges from 3 to 7 cm for GLONASS and from 2 to 7 cm for Galileo. Similar to the orbit comparisons, increased clock differences are present for BeiDou-2 during the eclipse periods, resulting in RMS values of around 10 cm.
《Fig. 6》

Fig. 6. RMS of inter-AC clock differences after removing a constellation mean bias per epoch and a daily satellite-specific bias for the period from January to June 2018.
《4. SISRE》
4. SISRE
The SISRE is commonly used for the quality assessment of broadcast ephemerides [37,38]. A precise orbit and clock product with significantly superior accuracy is used as reference. However, the SISRE concept can also be used for a consistency assessment of different precise products of similar quality. Epoch-wise, globally averaged SISRE values are obtained as follows:

where R, A, and C denote the orbit differences in the radial, alongtrack, and cross-track directions, respectively. T represents the clock differences corrected for a constellation mean value per epoch and a daily bias per satellite. w1 and w2 are constellation-specific weighting factors given in Table 4 of Ref. [38]. The SISRE provides a measure for the positioning accuracy that can be achieved, depending on the geometry of the observed satellites and the noise of the GNSS observations.
Constellation-specific SISRE values computed for the time interval from January until June 2018 are listed in Table 3. The orbit SISRE (T set to zero) as well as the 95th percentile of the SISRE are given in that table. A dynamic 3σ outlier screening has been applied. QZSS is not included, due to incomplete coverage by the MGEX ACs.
The orbit SISRE values in Table 3 are smaller than the 3D RMS in Table 2 for all constellations, due to the weighting factors in Eq. (1). The legacy systems show the highest consistency with GPS on the 1–2 cm level, and with GLONASS on the 2–5 cm level. The emerging systems have orbit SISRE values of 2–6 cm for Galileo and 7–14 cm for BeiDou-2 MEO and IGSO satellites. At a representative value of 60 cm, the orbit SISRE of BeiDou-2 GEO satellites obtained for GFZ and WHU is significantly worse, due to the static viewing geometry of these satellites.
《Table 3》
Table 3 SISRE(orbit) and SISRE(95%) for the period from January until June 2018.
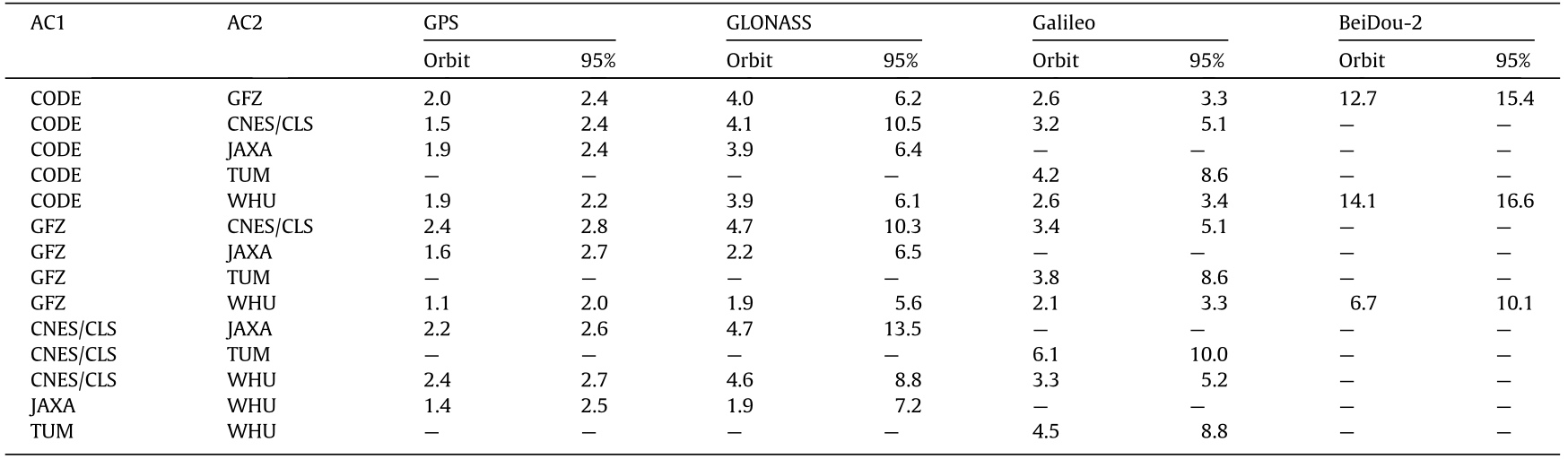
BeiDou-2 is limited to IGSO and MEO satellites. All values are given in centimeter.
The SISRE(95%) for GPS is smaller than 3 cm for all AC combinations. The differences between the ACs are larger for the other GNSSs, with SISRE(95%) mean values of 8 cm for GLONASS and 6 cm for Galileo. For BeiDou-2 MEO and IGSO satellites, a 10 cm SISRE(95%) is achieved for GFZ/WHU, whereas the comparisons with CODE are 50% worse. The SISRE(95%) of the BeiDou-2 GEO satellites even amounts to 1 m for GFZ/WHU, and the value for the complete BeiDou-2 constellation is 66 cm.
《5. Conclusions》
5. Conclusions
The consistency of the MGEX orbit and clock products has significantly improved in recent years. This is an important step forward to reach the ultimate goal of MGEX—namely, the generation of a combined orbit and clock product for all GNSSs. Combined orbit and clock products [39,40] are currently provided separately for GPS and GLONASS. Preliminary combination tests for Galileo, BeiDou, and QZSS have already been done by Refs. [41,42]. However, a prerequisite for a successful combination is a further harmonization of models for satellite antenna phase centers, attitude, Earth radiation pressure, and antenna thrust. Furthermore, improved solar radiation pressure models are required for BeiDou and QZSS. Another challenge for the future is the provision of precise products for BeiDou-3 and IRNSS in view of the limited/lacking availability of dual-frequency observations from the IGS tracking network.
Up-to-date analysis of MGEX orbit and clock products is available at the MGEX product analysis website at Ref. [43]. This website provides recent clock time series, SLR residual analysis, and orbit and clock comparisons of the different constellations, and is updated on a weekly basis.
《Acknowledgements》
Acknowledgements
We would like to acknowledge the efforts of the MGEX station operators, data, and analysis centers, as well as the ILRS for providing SLR normal points.
《Compliance with ethics guidelines》
Compliance with ethics guidelines
Peter Steigenberger and Oliver Montenbruck declare that they have no conflict of interest or financial conflicts to disclose.











 京公网安备 11010502051620号
京公网安备 11010502051620号




