
《1 工程研究前沿》
1 工程研究前沿
《1.1 Top10 工程研究前沿发展态势》
1.1 Top10 工程研究前沿发展态势
机械与运载工程领域(以下简称机械领域)所研判的 Top10 工程研究前沿涉及机械工程、船舶与海洋工程、航空宇航科学技术、兵器科学与技术、动力及电气设备工程与技术、交通运输工程等学科方向(见表 1.1.1)。其中,“自主水下航行器的自适应跟踪”“多智能体系统的一致性控制”“机械手的自适应神经网络控制”“水下自主导航系统”“全球导航卫星系统优化”和“近海岸波浪能资源评估及利用”是传统研究的深入,“锂离子电池热管理技术”“认知无线网络”“基于触觉的目标识别”和“电 / 磁场强化纳米流体对流传热”是新兴前沿。论文自 2012 年至 2017 年的逐年发表情况见表 1.1.2,“锂离子电池热管理技术”和“电/ 磁场强化纳米流体对流传热”是近年来论文发表增速最显著的方向。
(1)自主水下航行器的自适应跟踪
由于自主水下航行器是一个典型的强耦合非线性系统,易受到水下洋流等时变因素干扰,比一般刚体具有更强的模型、参数不确定性。针对未知参数具有线性化形式的非线性系统,目前一般采用自适应技术,在线预估未知参数;针对参数不具有线性化形式的系统,可采用神经网络方法补偿系统不确定性,保证跟踪误差的稳定性。根据推进器配置不同,自主水下航行器跟踪研究主要分为欠驱动水下航行器跟踪控制、全驱动水下航行器跟踪控制。欠驱动水下航行器跟踪控制系统各运动自由度之间跟踪误差具有很强的非线性耦合,国内外学者主要
《表 1.1.1》
表 1.1.1 机械领域 Top10 工程研究前沿
| 序号 | 工程研究前沿 | 核心论文数 | 被引频次 | 篇均被引频次 | 平均出版年 | 常被引论文占比 | 被专利引用的文献占比 |
| 1 | 自主水下航行器的自适应跟踪 | 6 | 75 | 12.5 | 2014.67 | 0.00% | 0 |
| 2 | 多智能体系统的一致性控制 | 18 | 1197 | 66.5 | 2014.72 | 11.10% | 0 |
| 3 | 机械手的自适应神经网络控制 | 3 | 376 | 125.33 | 2016 | 66.70% | 0 |
| 4 | 水下自主导航系统 | 5 | 106 | 21.2 | 2014.8 | 0.00% | 0 |
| 5 | 锂离子电池热管理技术 | 13 | 169 | 13 | 2016.23 | 15.40% | 0 |
| 6 | 全球导航卫星系统优化 | 8 | 217 | 27.13 | 2013.63 | 0.00% | 0.13 |
| 7 | 认知无线网络 | 22 | 755 | 34.32 | 2014.86 | 9.10% | 0 |
| 8 | 基于触觉的目标识别 | 4 | 112 | 28 | 2016.75 | 50.00% | 0 |
| 9 | 近海岸波浪能资源评估及利用 | 32 | 925 | 28.91 | 2014.19 | 9.40% | 0 |
| 10 | 电 / 磁场强化纳米流体对流传热 | 19 | 801 | 42.16 | 2017 | 10.50% | 0 |
《表 1.1.2 》
表 1.1.2 机械领域 Top10 工程研究前沿逐年核心论文发表数
| 序号 | 工程研究前沿 | 2012年 | 2013 年 | 2014 年 | 2015 年 | 2016 年 | 2017 年 |
| 1 | 自主水下航行器的自适应跟踪 | 0 | 1 | 1 | 3 | 1 | 0 |
| 2 | 多智能体系统的一致性控制 | 1 | 3 | 4 | 3 | 6 | 1 |
| 3 | 机械手的自适应神经网络控制 | 0 | 0 | 0 | 0 | 3 | 0 |
| 4 | 水下自主导航系统 | 0 | 1 | 1 | 1 | 2 | 0 |
| 5 | 锂离子电池热管理技术 | 0 | 0 | 0 | 1 | 8 | 4 |
| 6 | 全球导航卫星系统优化 | 1 | 4 | 0 | 3 | 0 | 0 |
| 7 | 认知无线网络 | 2 | 4 | 2 | 2 | 11 | 1 |
| 8 | 基于触觉的目标识别 0 | 0 | 0 | 0 | 0 | 1 | 3 |
| 9 | 近海岸波浪能资源评估及利用 | 4 | 9 | 4 | 8 | 6 | 1 |
| 10 | 电 / 磁场强化纳米流体对流传热 | 0 | 0 | 0 | 0 | 0 | 19 |
是利用反步控制方法及级联系统控制方法等来实现跟踪误差的渐近稳定性;由于全驱动水下航行器跟踪控制系统每个自由度均有独立的控制输入, 国内外学者主要采用自适应反步控制方法等来获得具有全局线性稳定性的轨迹跟踪控制器。自主水下航行器编队协同跟踪探测效能远优于单体跟踪探测,在逐步完善自主水下航行器自适应单体跟踪控制技术的基础上,对于自适应编队协同控制技术及智能路径规划技术等研究将是该研究方向的发展趋势。
(2) 多智能体系统的一致性控制
从人群到飞鸟、游鱼、昆虫、细菌、细胞,自然界广泛存在着大规模群体运动。相互联系而不断运动的个体组成的系统涌现出了丰富多彩而高度协调的群集动力学行为。多智能体系统是理解生物和自然群集行为的一个途径,同时在工业多机器人群体协同、无人机编队控制、人类群体行为调控疏导、无线传感网络优化等领域具有可观的应用价值。多智能体系统是由一系列相互作用的智能体构成,各个智能体之间通过通信、合作、协调、调度、管理和控制等方式来表达系统的结构、功能及行为特性,完成单个智能体不能完成的大量而又复杂的工作。多智能体系统具有自主性、分布性、协调性,并具有自组织能力、学习能力和推理能力,因而采用多智能体系统解决实际问题有很强的鲁棒性和可靠性。由于生物学、计算机科学、人工智能、自动化科学、物理科学等多个学科交叉和渗透发展, 多智能体系统已成为工程控制学科的前沿问题。初期多智能体系统协同的研究受自然界广泛存在的群集现象启发,利用数学、计算机仿真和系统科学的方法进行探索。近几十年来出现了大量的多智能体系统协同控制理论的研究。多智能体的协调控制的基本问题包括一致性控制、集聚控制、蜂拥控制和编队控制等。一致性控制是多智能体系统协调控制中一个最基本的问题,其研究可以推广应用到其他协同控制问题。一致性控制是指设计一致性协议使得各智能体之间通过局部信息交互,实现所有智能体的目标状态值一致。一致性控制研究主要从三个方面展开:智能体动力学复杂度、通信拓扑复杂度以及网络信息传输复杂度。当前多智能体系统最重要的应用是群体机器人的协同。特别是传统的多机器人生产线往往采取集中式控制结构,难以适应面向任务的小批量、多品种的生产,缺乏敏捷制造的能力。随着当今国际制造业正在向大型、复杂、动态和开放的方向转变,现代制造的复杂作业需要多机器人协同完成,因此亟待研制具有更好的顺应性、一致性和优化性能的群体机器人系统。
(3) 机械手的自适应神经网络控制
多指灵巧机械手是一个复杂的、动态耦合、具有时变特性的非线性系统,存在诸如系统建模误差、高频特性、关节摩擦以及信号检测误差等多种不确定性因素,这些客观存在的实际情况使得控制系统性能变差,以致常规的反馈技术不能满足控制要求。神经网络具有非线性变换特性和高度的并行运算能力,可以有效辨识出机械手系统的参数,但其不能完全解决机械手建模误差和外界干扰等带来的不确定性问题。为了利用神经网络对机械手系统进行自适应控制,往往还需要融合其他算法,包括滑模控制、鲁棒控制和智能控制等方法。目前基于知识规则和学习推理的智能控制算法,如模糊控制、学习控制、专家控制和遗传算法、粒子群寻优算法等, 在处理系统不确定性方面具有各自的优势,将多种控制方法相融合、取长补短、有机结合,形成新的控制方法已成为多指机械手自适应控制领域的研究前沿和发展趋势。
(4) 水下自主导航系统
自主水下航行器广泛应用于水下作业,是许多科学、工业和军事活动的基础,因此实现水下航行器的高精度定位以及多个水下航行器的协同导航已经成为当前国内外的研究前沿。超短基线定位系统在近年来已经得到普遍应用,它是一种以声波为信息载体的水下声学定位技术,由水下航行器的声信标发出声信号、水面上的超短基线基阵接收信号并测算水下方位及距离。该系统由基于卡尔曼滤波器、扩展卡尔曼滤波器或者分散扩展信息滤波器的算法提供软件方案,惯性测量单元、光纤陀螺仪和多普勒计程仪等传感元件则构成了硬件系统。在进行水下定位和导航时,影响其精度的重要因素是针对水下航行器运动的估计算法, 该算法不仅在期望路径和执行路径之间的位置误差方面影响定位和导航的结果,而且还影响由水下航行器获取的地理参考数据,因此自主水下航行器的运动估计算法需要精确且轻量。此外,声学调制解调器作为超短基线基阵的替代方案,在单个自主水下航行器的同步时钟单向行程时间声学导航方面也具有较大的应用潜力。
(5) 锂离子电池热管理技术
近些年,在能源危机与环境污染的双重威胁下, 电动汽车的发展得到了人们广泛关注。锂离子电池因具有能量密度高和功率密度强、循环寿命长以及自放电比率低等优点成为电动汽车动力首选。但锂离子电池在大电流快速充放电循环过程中会产生大量的热量并可能引发热逃逸,倘若处理不当会对电池性能、寿命、安全性等方面产生极大影响。实验和数值模拟通常用来分析电池和电池组的热行为,以便进行更好的热管理。精确的热学模型对于锂离子电池数值模拟至关重要,必须精确表达电池中的能量守恒、热产生以及边界条件,还需配合电化学及等效电路模型进行辅助计算。目前动力电池冷却的研究方法主要集中在风冷、液冷、相变材料冷却、沸腾冷却与热管冷却等。同时,电池加热技术的研究也不能忽视,这决定了锂离子电池能否正常应用于低温和高海拔地区。各类热管理技术各有利弊,实际应用中必须综合考虑成本、复杂度、重量、冷却效果、温度一致性、寄生功率消耗各个方面,方能实现锂离子电池的有效热管理。
(6) 全球导航卫星系统优化
全球卫星导航定位系统(GNSS)广泛应用于军事、导航、测绘、勘探、交通运输等领域, GNSS 技术的可靠性、响应速度及定位精度优化一直是国内外关注的研究前沿。近年来,GNSS 技术在汽车导航、智能手机等消费级产品中大量使用, 在城市中呈现出广泛的应用前景。GNSS 技术是通过从多个导航卫星信号中提取“伪距”参数以实现位置估算。然而,由于城市内建筑群密集程度高, 会形成对卫星信号一定程度的屏障与干扰,从而影响到 GNSS 的定位精度与响应速度。因此,提升GNSS 在城市工况中的鲁棒性并优化定位与导航精度的任务十分艰巨。近年来,GNSS 技术针对城市路况,在提升定位精度与相应速度的研究上取得了大量成果。其中,三维建筑模型辅助预测、数字地图辅助识别、阴影匹配定位算法等新型技术为城市中高精度定位的发展起到了重要作用,使得 GNSS 的可靠性得以巨大提升。此外,GNSS 技术还受城市高架、桥梁、隧道等一系列复杂工况影响,依然面临严峻挑战。
(7) 认知无线网络
认知无线网络是在无线网络的基础上发展出来的先进网络技术,其核心思想是通过频谱感知、自主决策及网络重构,实现频谱动态分配,以提高频谱资源利用效率并适应网络的动态变化。频谱感知是通过检测无线网络中的频谱使用信息,获得空闲的可用频段。自主决策与网络重构是分析可用的频谱资源,根据实时变化的用户需求和频谱利用策略, 进行网络参数的调整,实现频谱资源的自适应配置。近年来,认知无线网络出现了若干新的发展方向。其一,认知无线网络与电能传输结合,使网络可以同时传输信息与电能。其二,认知无线电网络中引入了协作中继,次级用户作为中继,帮助主用户协作传输数据,进行信息协作。在未来的物联网与智能交通中,密集的无线传感器与智能车辆将造成通信需求的爆发式增长和无线频谱资源短缺,基于认知无线网络提出的认知物联网与认知车联网在缓解频谱资源压力方面将发挥重要作用。
(8) 基于触觉的目标识别
机器人通过指尖触觉传感器实现对外部环境或目标物体的感知。触觉传感可以捕获多个对象属性, 如物体的纹理、粗糙度、空间特征、柔度或摩擦等, 因而成为智能机器人领域非常重要的传感模式。基于触觉的环境感知在需要精细操作的手术、对接触敏感的海底焊接等领域具有至关重要的作用。在实际的机器人操作中,机械手通常具有多指,不同手指的触觉数据构成序列,利用触觉序列数据集显示优势并考虑多指间的内在关系,开发联合核稀疏编码模型和核字典学习方法,有助于提高基于触觉的物体识别性能。此外,随着智能机器人技术迅猛发展,人们迫切希望赋予机器人类似人类皮肤的触觉感知能力,以提高智能仿生机器人的性能水平,因此柔性触觉传感器的研究也成为触觉传感领域的前沿内容,柔性多维触觉传感器的研制与开发是其中的重点与难点之一。
(9) 近海岸波浪能资源评估及利用
近海岸波浪能作为一种可再生清洁能源,具有能量密度高和分布面广等特点,其开发和利用将对解决能源危机、环境污染和气候变化等问题发挥巨大的作用。科学界对于近海岸波浪能的研究主要集中在两方面:一是对近海岸波浪能储量和时空分布进行有效评估,以便为波浪能电站的建站选址和波浪能转换装置的设计提供有效的指导;二是对波浪能转换装置的设计、开发和实验。目前, 在全球各海域海浪场分析和波浪能资源评估方面, 海浪数值模拟是获取海浪参数的主要手段,但是其预报精度受到诸多因素制约,对于复杂海浪场的模拟能力有限,与现场观测数据存在一定的差距,所以仍需寻找一种能获取长时间、大范围海浪结果的现场观测手段来提高评估的准确性,丰富评估手段。此外,由于海洋环境复杂多变,波浪能本身的不稳定、储量大、分布广和利用难等特点,应用于海洋之中的波浪能转换装置还易受到海洋灾害性气候的侵袭。因此,近海岸波浪能资源评估利用与开发,在理论研究与装置研制等方面,尚有诸多艰巨的难题亟需解决,比如提高波浪能资源评估及预测的全面性和准确度、优化波浪能装置设计、提升波浪能装置响应速度和转换效率、提高波浪能装置稳定性和可靠性、降低制造和安装成本等。
(10) 电 / 磁场强化纳米流体对流传热
纳米流体是在流体中加入纳米颗粒形成的一类新型传热冷却工质,具有较高的导热系数和良好的流体跟随性,将其应用于对流传热能够明显地提高系统的传热效果。近年来,在传统纳米流体的基础上,进一步利用电/ 磁场来强化对流传热逐渐成为国内外研究的前沿。目前,借助理论和数值仿真方法,阐述了在电/ 磁场作用下纳米流体分别作为单相流和多相流的对流传热特性,揭示了颗粒尺寸、形状、表面特性、颗粒和液体的化学性质等以及电 / 磁场特性参数对纳米流体对流传热的影响规律。然而,由于电 / 磁场中纳米颗粒的受力和流动状况相当复杂,提出的理论与仿真模型难以全面考虑对流传热的影响因素。因此,还需采用先进、精确的测试方法对电 / 磁场强化纳米流体对流传热进行实验研究,积累丰富的实验数据,进而完善电 / 磁场作用下纳米流体对流传热的模型。在此基础上,准确阐述电 / 磁场对纳米流体对流传热的作用机理,有望推动其在工业中的应用。
《1.2 Top3 工程研究前沿重点解读》
1.2 Top3 工程研究前沿重点解读
1.2.1 自主水下航行器的自适应跟踪
随着自主水下航行器在海洋科学调查、水下目标探测等方面的广泛应用,自主水下航行器自适应跟踪技术也得到了国内外学者的广泛关注,并开展了大量的理论研究工作及工程实践工作。
自主水下航行器跟踪控制问题是指为被控对象设计一个控制输入作用,使得水下航行器可以从初始状态出发跟踪惯性坐标系下给定的参考轨迹或路径。其主要包括轨迹跟踪问题和路径跟踪问题等, 两者区别主要体现在跟踪参考路径时是否跟时间有关,前者明确有时间上的严格约束,从理论角度出发,轨迹跟踪问题比路径跟踪问题更复杂。
根据推进器配置不同,自主水下航行器跟踪控制研究分为欠驱动水下航行器跟踪控制、全驱动水下航行器跟踪控制。目前,大多数的水下航行器属于欠驱动水下航行器范畴,其控制系统存在非完整约束,针对具体跟踪控制问题,国内外学者采用李雅普诺夫直接法、反步控制法、级联系统控制法、级联 – 反步联合法等开展了大量研究工作。目前主流的研究趋势主要是根据具体跟踪问题将当前复杂系统分解为若干级联系统,基于级联系统稳定性原理以及自适应反步方法,在获得较为简单的控制律的同时保证控制系统的全局一致渐进稳定性和对参数不确定的自适应性。
对于全驱动水下航行器跟踪控制问题,国内外学者采用滑膜控制及反馈线性化等非线性控制方法和模糊控制、神经网络控制及模型预测控制等智能控制方法开展了大量研究工作。目前主流的研究趋势主要是利用自适应反步方法等来保证跟踪误差的全局一致渐进稳定性,利用 BP 神经网络方法等解决自主水下航行器动力学模型中流体动力学参数等不确定项。
另外,在完成单体水下航行器跟踪控制研究的基础上,开展多水下航行器跟踪控制问题研究是未来主要的发展趋势。利用相互耦合的时空分步控制策略,保证单体水下航行器跟踪在其自身期望路径, 引入协同控制律,设计路径参数一致性算法,以此完成多水下航行器协同跟踪控制的目标。
“自主水下航行器的自适应跟踪”工程研究前沿中核心论文的发文国家/ 地区分别为中国(3)、印度(1)、韩国(1)和伊朗(1),篇均被引频次排在前三的国家/ 地区为印度(19)、韩国(13) 和中国(11),见表 1.2.1。从目前样本数据来看, 主要发文国家/ 地区间基本不存在合作,见图 1.2.1。核心论文的发文机构分别为 Dalian Maritime Univ(2)、IIT Delhi(1)、NIT Rourkela(1)、An- hui Sci & Technol Univ(1)、Chosun Univ(1)和Islamic Azad Univ(1),篇均被引频次排在前三的机构分别为 IIT Delhi(19)、NIT Rourkela(19) 和Chosun Univ(13),见表 1.2.2。在发文机构中,IIT Delhi 和 NIT Rourkela 存在合作,见图 1.2.2。施引核心论文发文量排在前三的国家 / 地区分别为中国(41)、伊朗(8)和印度(4),见表 1.2.3。施引核心论文的主要产出机构分别为 Harbin Engn Univ(12)、Shanghai Jiao Tong Univ(10)和 Da- lian Maritime Univ(10),见表 1.2.4。
1.2.2 多智能体系统的一致性控制
多智能体系统的一致性控制是指设计一致性协议使得各智能体之间通过局部信息交互,实现所有智能体的目标状态值一致。一致性控制研究主要可以分为三个方面:智能体动力学复杂度、通信拓扑复杂度以及网络信息传输复杂度。除了理论研究外, 多智能体系统一致性研究也陆续地被应用到工业多机器人群体协同、无人机 / 艇编队控制、人类群体行为调控疏导、无线传感网络优化等领域。
(1)智能体动力学复杂度
智能体不同的动力学特性给多智能体系统的一
《表 1.2.1》
表 1.2.1 “自主水下航行器的自适应跟踪”工程研究前沿中核心论文的主要产出国家/ 地区
| 序号 | 国家 / 地区 | 核心论文数 | 论文比例 | 被引频次 | 被引频次比例 | 篇均被引频次 |
| 1 | China | 3 | 50.00% | 33 | 44.00% | 11 |
| 2 | India | 1 | 16.67% | 19 | 25.33% | 19 |
| 3 | South Korea | 1 | 16.67% | 13 | 17.33% | 13 |
| 4 | Iran | 1 | 16.67% | 10 | 13.33% | 10 |
《表 1.2.2》
表 1.2.2 “自主水下航行器的自适应跟踪”工程研究前沿中核心论文的主要产出机构
| 序号 | 机构 | 核心论文数 | 论文比例 | 被引频次 | 被引频次比例 | 篇均被引频次 |
| 1 | Dalian Maritime Univ | 2 | 33.33% | 21 | 28.00% | 10.5 |
| 2 | IIT Delhi | 1 | 16.67% | 19 | 25.33% | 19 |
| 3 | NIT Rourkela | 1 | 16.67% | 19 | 25.33% | 19 |
| 4 | Anhui Sci & Technol Univ | 1 | 16.67% | 12 | 16.00% | 12 |
| 5 | Chosun Univ | 1 | 16.67% | 13 | 17.33% | 13 |
| 6 | Islamic Azad Univ | 1 | 16.67% | 10 | 13.33% | 10 |
《图 1.2.1》
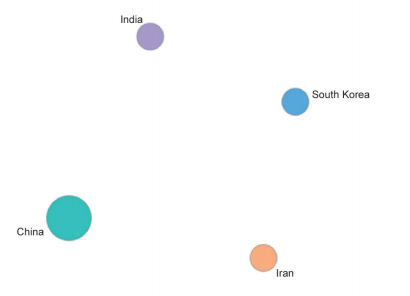
图 1.2.1 “自主水下航行器的自适应跟踪”工程研究前沿主要国家 / 地区间的合作网络
《图 1.2.2》

图 1.2.2 “自主水下航行器的自适应跟踪”工程研究前沿主要机构间的合作网络
《表 1.2.3》
表 1.2.3 “自主水下航行器的自适应跟踪”工程研究前沿中施引核心论文的主要产出国家/ 地区
| 序号 | 国家 / 地区 | 施引核心论文数 | 施引核心论文比例 | 平均施引年 |
| 1 | China | 41 | 62.12% | 2016.5 |
| 2 | Iran | 8 | 12.12% | 2016.3 |
| 3 | India | 4 | 6.06% | 2016.5 |
| 4 | UK | 3 | 4.55% | 2015.7 |
| 5 | South Korea | 3 | 4.55% | 2017 |
| 6 | USA | 2 | 3.03% | 2017 |
| 7 | Canada | 2 | 3.03% | 2017 |
| 8 | Italy | 1 | 1.52% | 2015 |
| 9 | Portugal | 1 | 1.52% | 2016 |
| 10 | Malaysia | 1 | 1.52% | 2016 |
《表 1.2.4》
表 1.2.4 “自主水下航行器的自适应跟踪”工程研究前沿中施引核心论文的主要产出机构
| 序号 | 机构 | 施引核心论文数 | 施引核心论文比例 | 平均施引年 |
| 1 | Harbin Engn Univ | 12 | 23.53% | 2016.5 |
| 2 | Shanghai Jiao Tong Univ | 10 | 19.61% | 2016.7 |
| 3 | Dalian Maritime Univ | 10 | 19.61% | 2017.3 |
| 4 | Islamic Azad Univ | 6 | 11.76% | 2016.17 |
| 5 | Minist Educ China | 3 | 5.88% | 2017.67 |
| 6 | Northwestern Polytech Univ | 2 | 3.92% | 2015.5 |
| 7 | Ocean Univ China | 2 | 3.92% | 2015.5 |
| 8 | Dalian Univ Technol | 2 | 3.92% | 2015.5 |
| 9 | Natl Inst Technol Rourkela | 2 | 3.92% | 2016.5 |
| 10 | Amirkabir Univ Technol | 2 | 3.92% | 2016.5 |
致性研究带来不同程度的难度。在已有的研究中, 同构多智能体系统的研究比较多。近些年来,对于异构多智能体系统的一致性研究越来越多,研究的目标主要是使得所有智能体的输出同步。这里的一致性分析通常包含两个方面:设计一个分布式同构参考多智能体系统并完成其一致性控制; 设计输出调节控制器实现每个智能体输出跟踪设计的参考系统。考虑到网络中传输的信息类型, 如果网络中传输的是参考多智能体系统的信息, 这两个方面可以看作两个相互独立的过程;如果网络中传输的信息只有智能体的输出,这两个方面是耦合的,需要同步进行,一致性分析将会更加复杂。
(2)通信拓扑复杂度
通信拓扑描述了智能体之间的信息交互关系。通信拓扑可以抽象成图,从而可以引入代数图论知识进行相关的分析。按照拓扑是否随时间变化,可以分为固定拓扑和时变拓扑。固定拓扑下多智能体系统的一致性研究已经相对成熟,而时变拓扑下的一致性研究尚有一些难题还未解决,研究内容也更丰富。其中联合连通是目前时变拓扑中最弱的一种假设,针对不同类型动力学的多智能体系统,目前的研究通常对联合连通拓扑添加另外的假设条件, 在静态或动态协同控制律下实现一致性,因此还需要进一步的研究。
(3)网络信息传输复杂度
多智能体系统的一致性依赖于智能体之间的信息交互。有交互的智能体需要将与自身相关的信息在网络中进行传输。考虑到在实际应用中,信息的传输是不连续的,因此出现了很多设计采样协同控制器实现一致性的研究工作。为了降低网络传输压力以及提高网络通信效率,近些年来很多工作集中于进行事件驱动策略下的一致性控制问题研究。基于事件驱动控制的一个难点在于分析 zeno 现象, 特别是对于非线性多智能体系统,目前的研究还存在较大的局限,需要更多的探索。
“多智能体系统的一致性控制”工程研究前沿中核心论文发文量排在前三的国家 / 地区分别为中国(10)、美国(8)和意大利(3),篇均被引频次排在前三的国家/ 地区为澳大利亚(549)、美国(95.13)和中国(82.9),见表 1.2.5。在发文量 Top10 国家 / 地区中,中国和美国、荷兰和俄罗斯合作较多,见图 1.2.3。核心论文发文量排在前三的机构分别为 Chinese Acad Sci(6)、Univ Calif Riverside(4)、Catholic Univ Louvain(2)、Univ Illinois(2)、Huazhong Univ Sci & Technol(2)、Univ Groningen(2)和 Beijing Inst Control Engn(2),篇均被引频次排在前三的机构分别为 City Univ Hong Kong(549)、RMIT Univ(549)和 Southeast Univ(549),见表 1.2.6。在发文量 Top10 机构中,Chinese Acad Sci 、 Univ Calif Riverside 和 Beijing Inst Control Engn 间合作较多,见图 1.2.4。施引核心论文发文量排在前三的国家 / 地区分别为中国(597)、美国(181)和澳大利亚(75),见表 1.2.7。施引核心论文的主要产出机构分别为 Chinese Acad Sci(63)、Southeast Univ(51)和 Univ Illinois(34), 见表 1.2.8。
1.2.3 机械手的自适应神经网络控制
机械手是典型的非线性、时变系统,具有受限的关节空间与任务空间,存在系统建模误差、高频特性、关节摩擦以及信号检测误差等不确定性因素, 系统的动态性能很难用精准的数学模型表示出来, 这些客观因素会导致机械手的控制系统性能变差, 以致常规的反馈控制技术,如鲁棒控制、计算力矩法、独立关节的 PID 控制、变结构控制和自适应控制等,都不能很好满足控制的要求。近年来,研究
《表 1.2.5》
表 1.2.5 “多智能体系统的一致性控制”工程研究前沿中核心论文的主要产出国家/ 地区
| 序号 | 国家 / 地区 | 核心论文数 | 论文比例 | 被引频次 | 被引频次比例 | 篇均被引频次 |
| 1 | China | 10 | 55.56% | 829 | 69.26% | 82.9 |
| 2 | USA | 8 | 44.44% | 761 | 63.58% | 95.13 |
| 3 | Italy | 3 | 16.67% | 211 | 17.63% | 70.33 |
| 4 | Belgium | 2 | 11.11% | 76 | 6.35% | 38 |
| 5 | The Netherlands | 2 | 11.11% | 34 | 2.84% | 17 |
| 6 | Russia | 2 | 11.11% | 34 | 2.84% | 17 |
| 7 | Australia | 1 | 5.56% | 549 | 45.86% | 549 |
| 8 | Sweden | 1 | 5.56% | 25 | 2.09% | 25 |
| 9 | France | 1 | 5.56% | 6 | 0.50% | 6 |
| 10 | Saudi Arabia | 1 | 5.56% | 28 | 2.34% | 28 |
《表 1.2.6》
表 1.2.6 “多智能体系统的一致性控制”工程研究前沿中核心论文的主要产出机构
| 序号 | 机构 | 核心论文数 | 论文比例 | 被引频次 | 被引频次比例 | 篇均被引频次 |
| 1 | Chinese Acad Sci | 6 | 33.33% | 239 | 19.97% | 39.83 |
| 2 | Univ Calif Riverside | 4 | 22.22% | 634 | 52.97% | 158.5 |
| 3 | Catholic Univ Louvain | 2 | 11.11% | 76 | 6.35% | 38 |
| 4 | Univ Illinois | 2 | 11.11% | 52 | 4.34% | 26 |
| 5 | Huazhong Univ Sci & Technol | 2 | 11.11% | 48 | 4.01% | 24 |
| 6 | Univ Groningen | 2 | 11.11% | 34 | 2.84% | 17 |
| 7 | Beijing Inst Control Engn | 2 | 11.11% | 43 | 3.59% | 21.5 |
| 8 | City Univ Hong Kong | 1 | 5.56% | 549 | 45.86% | 549 |
| 9 | RMIT Univ | 1 | 5.56% | 549 | 45.86% | 549 |
| 10 | Southeast Univ | 1 | 5.56% | 549 | 45.86% | 549 |
《图 1.2.3》
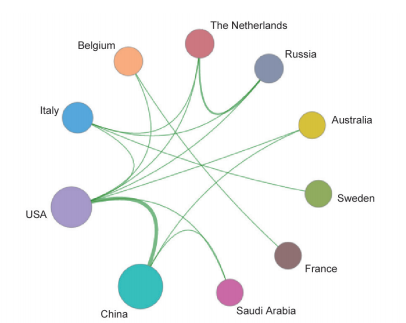
图 1.2.3 “多智能体系统的一致性控制”工程研究前沿主要国家 / 地区间的合作网络
人员利用神经网络所具有的一致逼近能力、并行分布式处理、学习以及自适应能力、故障容错能力以及易于硬件实现的结构等特性,开展了非线性系统的控制与辨识研究工作,取得积极的研究结果,为解决机械手建模与控制所遇到的不确定性问题提供了有效的途径。
要实现一个稳定的神经网络控制系统,神经网络在投入到闭环系统之前需要经过充分的离线训练。早期关于神经网络控制的研究主要侧重于仿真和具体实验特例分析,缺乏关于闭环神经网络控制系统稳定性、鲁棒性以及收敛等方面的分
《图 1.2.4》
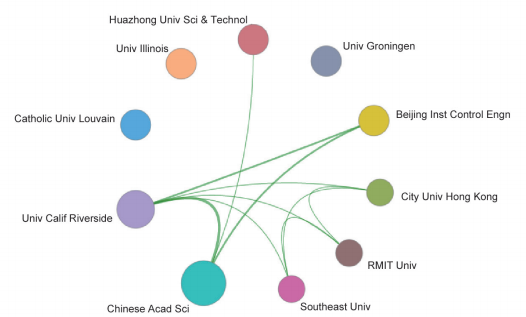
图 1.2.4 “多智能体系统的一致性控制”工程研究前沿主要机构间的合作网络
《表 1.2.7 》
表 1.2.7 “多智能体系统的一致性控制”工程研究前沿中施引核心论文的主要产出国家/ 地区
| 序号 | 国家 / 地区 | 施引核心论文数 | 施引核心论文比例 | 平均施引年 |
| 1 | China | 597 | 54.82% | 2015.7 |
| 2 | USA | 181 | 16.62% | 2015.7 |
| 3 | Australia | 75 | 6.89% | 2015.9 |
| 4 | Singapore | 40 | 3.67% | 2015.7 |
| 5 | Italy | 38 | 3.49% | 2015.4 |
| 6 | The Netherlands | 35 | 3.21% | 2015.7 |
| 7 | Sweden | 35 | 3.21% | 2015.7 |
| 8 | UK | 34 | 3.12% | 2015.5 |
| 9 | France | 30 | 2.75% | 2015.8 |
| 10 | Russia | 24 | 2.20% | 2015.6 |
《表 1.2.8》
表 1.2.8 “多智能体系统的一致性控制”工程研究前沿中施引核心论文的主要产出机构
| 序号 | 机构 | 施引核心论文数 | 施引核心论文比例 | 平均施引年 |
| 1 | Chinese Acad Sci | 63 | 19.03% | 2015.3 |
| 2 | Southeast Univ | 51 | 15.41% | 2015.39 |
| 3 | Univ Illinois | 34 | 10.27% | 2015.44 |
| 4 | Nanyang Technol Univ | 31 | 9.37% | 2015.81 |
| 5 | Peking Univ | 28 | 8.46% | 2015.46 |
| 6 | Australian Natl Univ | 27 | 8.16% | 2016.19 |
| 7 | City Univ Hong Kong | 25 | 7.55% | 2015.56 |
| 8 | Shanghai Jiao Tong Univ | 25 | 7.55% | 2015.8 |
| 9 | Huazhong Univ Sci & Technol | 24 | 7.25% | 2015.38 |
| 10 | Univ Elect Sci & Technol China | 23 | 6.95% | 2015.3 |
析,其难点主要在于函数逼近时所采用的非线性参数网络。当初始神经网络权重的选取足够接近于理想权重时,神经网络控制能够保证闭环系统的稳定性与收敛。为了避免离线训练学习这个步骤,诸多基于 Lyapunov 稳定性理论的神经网络控制方法被研究人员相继提出,其最大的优点在于神经网络权重的自适应律是通过 Lyapunov 分析法得到的,在保证闭环系统稳定性的同时不需要离线训练。
尽管自适应神经网络控制已经取得了重大突破和进展,并在机械手的运动轨迹控制方面得到了应用,但其并不能完全解决机械手建模误差和外界干扰等带来的不确定性问题。近年来,基于知识规则和学习推理的智能控制算法,如模糊控制、学习控制、专家控制和遗传算法、粒子群寻优算法等得到广泛的研究,它们在处理系统不确定性方面具有各自的优势。尽管如此,不同的控制理论与方法在具有相应优点的同时又存在弊端,很难通过某一种方法达到理想的控制效果。为此往往需要将多种控制方法相融合、取长补短、有机结合,进而形成一种新的控制方法,这一策略已成为当今机器人控制的研究前沿,以模糊神经网络控制、神经网络鲁棒控制、模糊滑模变结构控制以及鲁棒自适应控制等为代表的混合方法己经在机械手的控制方法研究中得到发展和应用。
“机械手的自适应神经网络控制”工程研究前沿中核心论文的发文国家 / 地区为中国(3),篇均被引频次为 125.33,见表 1.2.9。核心论文的发文机构分别为 Univ Elect Sci & Technol China(3)、Univ Sci & Technol Beijing(2)和Southeast Univ(1),篇均被引频次排在前三的机构分别为 Southeast Univ(138)、Univ Elect Sci & Technol China(125) 和 Univ Sci & Technol Beijing(119),见表 1.2.10。在发文机构中,Univ Elect Sci & Technol China 和Univ Sci & Technol Beijing 合作较多,见图 1.2.5。施引核心论文发文量排在前三的国家 / 地区分别为中国(216)、英国(27)和美国(17),见表 1.2.11。施引核心论文的主要产出机构分别为 Univ Sci & Technol Beijing(46)、Univ Elect Sci & Technol China(34) 和 South China Univ Technol(31), 见表 1.2.12。
《2 工程开发前沿》
2 工程开发前沿
《2.1 Top10 工程开发前沿发展态势》
2.1 Top10 工程开发前沿发展态势
机械与运载工程领域的 Top10 工程开发前沿涉及机械工程、船舶与海洋工程、航空宇航科学技术、兵器科学与技术、动力及电气设备工程与技术、交通运输工程等学科方向(见表 2.1.1)。其中,“MEMS 传感器”“燃气轮机”“海洋探测与定位技术”“无人汽车的自主控制”“海上通信、导航与定位技术”“新一代图像显示技术”“飞行器起降与飞行”和“新型发动机技术”是传统研究的深入,“船舶新型推进系统”和“无人机”
《表 1.2.9》
表 1.2.9 “机械手的自适应神经网络控制”工程研究前沿中核心论文的主要产出国家/ 地区
| 序号 | 国家 / 地区 | 核心论文数 | 论文比例 | 被引频次 | 被引频次比例 | 篇均被引频次 |
| 1 | China | 3 | 100.00% | 376 | 100.00% | 125.33 |
《表 1.2.10》
表 1.2.10 “机械手的自适应神经网络控制”工程研究前沿中核心论文的主要产出机构
| 序号 | 机构 | 核心论文数 | 论文比例 | 被引频次 | 被引频次比例 | 篇均被引频次 |
| 1 | Univ Elect Sci & Technol China | 3 | 100.00% | 376 | 100.00% | 125.33 |
| 2 | Univ Sci & Technol Beijing | 2 | 66.67% | 238 | 63.30% | 119 |
| 3 | Southeast Univ | 1 | 33.33% | 138 | 36.70% | 138 |
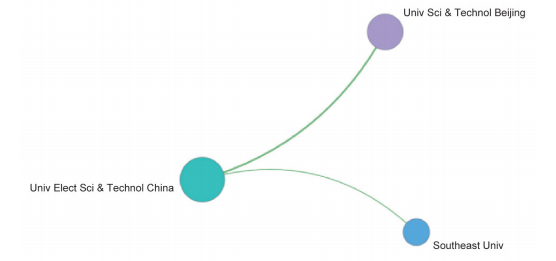
图 1.2.5 “机械手的自适应神经网络控制”工程研究前沿主要机构间的合作网络
《表 1.2.11》
表 1.2.11 “机械手的自适应神经网络控制”工程研究前沿中施引核心论文的主要产出国家/ 地区
| 序号 | 国家 / 地区 | 施引核心论文数 | 施引核心论文比例 | 平均施引年 |
| 1 | China | 216 | 68.14% | 2016.8 |
| 2 | UK | 27 | 8.52% | 2016.9 |
| 3 | USA | 17 | 5.36% | 2016.8 |
| 4 | Singapore | 16 | 5.05% | 2016.7 |
| 5 | Canada | 9 | 2.84% | 2016.9 |
| 6 | Iran | 9 | 2.84% | 2017.1 |
| 7 | Japan | 8 | 2.52% | 2016.5 |
| 8 | Australia | 7 | 2.21% | 2017 |
| 9 | India | 5 | 1.58% | 2017 |
| 10 | South Korea | 3 | 0.95% | 2016.7 |
《表 1.2.12》
表 1.2.12 “机械手的自适应神经网络控制”工程研究前沿中施引核心论文的主要产出机构
| 序号 | 机构 | 施引核心论文数 | 施引核心论文比例 | 平均施引年 |
| 1 | Univ Sci & Technol Beijing | 46 | 21.00% | 2016.57 |
| 2 | Univ Elect Sci & Technol China | 34 | 15.53% | 2016.5 |
| 3 | South China Univ Technol | 31 | 14.16% | 2016.97 |
| 4 | Liaoning Univ Technol | 19 | 8.68% | 2016.74 |
| 5 | Chinese Acad Sci | 17 | 7.76% | 2016.76 |
| 6 | Southeast Univ | 15 | 6.85% | 2016.73 |
| 7 | Harbin Inst Technol | 15 | 6.85% | 2016.93 |
| 8 | Natl Univ Singapore | 14 | 6.39% | 2016.71 |
| 9 | Northwestern Polytech Univ | 14 | 6.39% | 2016.86 |
| 10 | Swansea Univ | 14 | 6.39% | 2017 |
是新兴前沿。上述各个前沿所涉及的自 2012 年至2017 年的逐年核心专利公开量见表 2.1.2,“无人机”是近年来论文发表增速最显著的方向。
(1)MEMS 传感器
微机电系统(MEMS)传感器是采用微机械加工技术制造的新型传感器 , 是 MEMS 器件的一个重要分支。一直是各国大力发展的核心和前沿技术。近年来,智能装备与系统的快速发展再次引起研究机构对新型高性能 MEMS 传感器的高度重视。MEMS 传感器的门类品种繁多 , 按照被测量可分为加速度、压力、位移、流量、电磁场、图像、温度、气体成分以及离子浓度等类型传感器。作为获取信息的关键器件,MEMS 传感器对各种传感装备的微型化发展起着巨大的推动作用,已在航空航天、汽车工业、生物医学及消费电子产品等领域得到广泛应用。目前,随着纳米材料、生物材料、智能材料等新材料的引入以及纳米制造技术的不断进步, MEMS 传感器正向高精度、高可靠性、多功能集成化、智能化和微功耗方向快速发展。此外,物联网技术的兴起使无线 MEMS 传感器的需求急剧增加,电源已成为关键点。利用能量收集芯片将太阳能、风能、振动能、热能等转化为电能驱动无线传
《表 2.1.1》
表 2.1.1 机械领域 Top10 工程开发前沿
| 序号 | 工程开发前沿 | 公开量 | 被引频次 | 平均被引频次 | 平均公开年 |
| 1 | MEMS 传感器 | 227 | 5716 | 25.18 | 2013.16 |
| 2 | 船舶新型推进系统 | 152 | 884 | 5.82 | 2014.56 |
| 3 | 无人机 | 460 | 12880 | 28 | 2014.76 |
| 4 | 燃气轮机 | 265 | 3870 | 14.6 | 2013.45 |
| 5 | 海洋探测与定位技术 | 191 | 1567 | 8.2 | 2013.75 |
| 6 | 无人汽车的自主控制 | 70 | 1591 | 22.73 | 2014.19 |
| 7 | 海上通信、导航与定位技术 | 175 | 1857 | 10.61 | 2013.81 |
| 8 | 新一代图像显示技术 | 202 | 2626 | 13 | 2013.68 |
| 9 | 飞行器起降与飞行 | 99 | 955 | 9.65 | 2013.67 |
| 10 | 新型发动机技术 | 200 | 6400 | 32 | 2013.52 |
《表 2.1.2》
表 2.1.2 机械领域 Top10 工程开发前沿逐年核心专利公开量
| 序号 | 工程开发前沿 | 2012 年 | 2013 年 | 2014 年 | 2015 年 | 2016 年 | 2017 年 |
| 1 | MEMS 传感器 | 82 | 81 | 29 | 21 | 9 | 5 |
| 2 | 船舶新型推进系统 | 22 | 25 | 33 | 19 | 24 | 29 |
| 3 | 无人机 | 55 | 63 | 54 | 102 | 138 | 48 |
| 4 | 燃气轮机 | 76 | 82 | 46 | 43 | 10 | 8 |
| 5 | 海洋探测与定位技术 | 47 | 46 | 40 | 31 | 19 | 8 |
| 6 | 无人汽车的自主控制 | 11 | 11 | 21 | 14 | 7 | 6 |
| 7 | 海上通信、导航与定位技术 | 39 | 54 | 33 | 17 | 15 | 17 |
| 8 | 新一代图像显示技术 | 49 | 50 | 48 | 32 | 17 | 6 |
| 9 | 飞行器起降与飞行 | 27 | 19 | 26 | 15 | 11 | 1 |
| 10 | 新型发动机技术 | 67 | 35 | 53 | 29 | 4 | 12 |
感模块,实现 MEMS 传感器的无源化将成为重要发展趋势。
(2)船舶新型推进系统
目前,“原动机 – 传动系统 – 螺旋桨”是军船和商船应用最广泛的推进模式,这种模式虽然具有动力大、设计方法和制造工艺成熟等优点,但随着船舶的发展,它也暴露出诸多弊端,例如大型船舶的船体与推进轴系存在复杂的耦合振动,水下航行器多方向性和机动性不足,未来水 – 路 – 空三栖航行器需要适应多环境的推进器,推进轴系的振动和噪声更是制约潜艇隐身能力的世界性难题。在此背景下,发展高效、可靠的船舶新型推进系统是当今国内外研究前沿和难点。新型推进系统具有集成、仿生、高效和智能等特征。首先,多采用电机为动力,围绕电机效率和功率密度提升,感应电机、开关磁阻电机、永磁电机和超导电机等先后被论证, 低速电机结构拓扑优化、水环境适应性和高精度控制是研究重点;新型过流部件也是新型推进系统效率提升的关键,例如对转螺旋桨、泵喷导管 – 叶轮– 导叶、无轴推进器的内桨叶等,特殊过流结构导致复杂的耦合流动以及非定常流动,尚缺乏相应的流场描述和设计理论支持;高承载、长寿命轴承技术是新型推进系统的关键保障技术,针对低速、重载和泥沙环境开发轴承新材料和新结构是关键;新型推进系统的智能控制技术也是未来研究重点,除了实现推进系统自身的电机转速、仿生结构运动和矢量运动等控制,还涉及“推进装置—船舶”系统的运行控制。
(3) 无人机
无人机通常通过固定翼或旋翼方式产生升力保持其在空中运动。经过近几年的快速发展,人们的研究兴趣从简单平台设计和应用技术逐步转向多机平台系统和复杂功能技术。异构无人机群协同作业技术是目前十分有吸引力且极具挑战性的一个研究方向。异构无人机群是一个复杂的多智能体模型,既包含固定翼也包含旋翼,同时飞机的重量也可以相差比较大,不能把集群中的无人机作为刚体考虑,其气动弹性对集群产生的影响也必须在多智能体模型中体现。为了降低能耗、提高飞行效率和飞行可靠性,必须考虑协同飞行中无人机之间的气动干涉,因而催生了航迹优化﹑ 自主导航控制﹑防碰撞和智能避障的技术需求。此外,针对特殊场合的使用需求产生了一些新的开发前沿,例如便于运输或发射的机翼可折叠无人机,可垂直起降的可倾转旋翼无人机技术,以及为物流设计的无人飞行汽车技术,这些都是无人机技术的发展前沿。
(4) 燃气轮机
燃气轮机常用于船舶(军用舰艇为主)、车辆(坦克、工程车辆等大型载具)、发电机组等。近年来, 针对燃气轮机的研究前沿主要集中在通过改进燃烧室的结构和燃烧技术实现高效低排,以及结合先进智能检测算法和传感器技术实现实时的状态检测和故障诊断。随着环保要求的不断增强,高效低排成为评判燃气轮机先进性的重要性能指标之一。通过优化改进燃烧室冷却结构设计,增加结构紧凑、换热效率高的轻质间冷回热循环系统能够有效地提高发动机性能。然而,复杂的结构体系以及增加的部件导致发动机质量、制造和维护成本大幅提升,这些技术瓶颈都是目前燃气轮机实现高效低排的挑战。作为一个典型的复杂机械系统,燃气轮机结构形式复杂、工作状况恶劣、易发生各种机械故障。发动机的气路部件的失效、旋转部件的振动和摩擦副的磨损等各类故障均严重影响其运行的安全性、可靠性和高效性。燃气轮机复杂系统的状态诊断问题极具挑战性,由于强烈非线性、非平稳性、不确定性等复杂系统特征,基于传统经典数学理论建模求解十分困难。近年来得到快速发展的神经网络、遗传算法、专家系统等智能算法为解决此类问题提供了新的解决思路, 有望实现通过有限参数的故障检测,高效的实现定位、定性及定因。
(5) 海洋探测与定位技术
海洋蕴藏着丰富的自然资源,同时海洋也是开展地质学研究的巨大场地。近年来,海洋因其经济上的巨大潜力和战略上的重要地位越来越被人们重视。海洋探测是获取海洋环境、资源、能源、权益信息的重要手段。随着海洋事业的发展,探测技术手段不断更新换代,为高精度的海洋探测提供了技术保证,高精度导航定位是实现海洋高精度探测的基础。要实现高精度的导航定位,不仅需要对母船进行精确导航定位,同时还要实现对水下探测系统的精确导航定位。常用的海洋探测与定位技术有拖曳声纳、天波雷达、天线阵列、陀螺仪等。装备拖拽声纳的舰艇可以保证在对周边水下环境保持掌握的同时维持一定的巡逻速度;天波雷达具有远程探测能力,可以实现对 800~3500 km 范围内的海面特性、海下目标及海面上空目标进行探测;利用天线阵列可以对海洋盐度等参数进行探测;由陀螺仪组成的惯性导航系统可以实时测量当前载体的三维姿态。由于单一探测与定位系统存在一定的缺陷,使得其通常不能单独进行探测与定位,现在更多地使用组合系统,它集中了多种探测与定位系统的优点, 是未来的发展趋势。
(6) 无人汽车的自主控制
汽车智能化技术简化了汽车的驾驶操作并提高了行驶安全性,正逐步得到广泛应用。其中最典型也是最热门的未来应用就是无人驾驶汽车。无人汽车自主控制通过人工智能技术、雷达、数学计算、监控设备与导航系统协作,实现无人驾驶。目前,无人汽车自主控制的开发前沿主要包括高精度定位、导航、环境感知、避障、自动泊车系统等。无人驾驶汽车产业化的瓶颈问题主要有技术难题、成本、驾驶行为以及法律法规等。实现无人驾驶汽车的量产必须经历驾驶员辅助、半自动驾驶、高度自动驾驶和完全自动驾驶四个阶段。尽管目前无人驾驶汽车产业化仍存在各种问题, 但无人驾驶汽车实质上是建立在汽车主动安全技术、智能化技术逐步升级的基础上的,只要市场对这些技术有持续的需求,就能推动汽车向完全无人化自主控制演进。
(7) 海上通信、导航与定位技术
随着船舶趋于大型化、高速化,以及海上交通密度与船舶装载量的不断增加,海上交通事故与经济损失呈增长趋势,航运安全与海洋生态开始逐渐受到威胁。海上通信、导航与定位技术在航海事业中扮演着重要角色,为海上军事、海上运输业、海上旅游业、沿海渔业等快速、安全发展提供了有力保障。作为海上通信的一部分,海上导航与定位技术主要来自于美国的 GPS、俄罗斯的 GLONASS、欧洲的GALILEO 和中国的北斗卫星导航四大系统, 其中,导航定位的精确度、响应速度、可靠性以及通信定位的稳定性、安全性是此项技术的主要发展方向。此外,海上通信技术还包含海上无线通信系统、海洋卫星通信系统、岸基移动通信系统、集成海洋通信系统等,现阶段依然存在覆盖范围小、传输效率低、受环境影响的通信可靠性差、通信成本高等问题。近年来,5G 移动通信、三路径海洋信道模型、微波散射等技术使海上通信效率、通信质量及通信距离等实现了明显的改善。建设覆盖范围广、传输距离远、通信速率与可靠性高、价格低廉的海上通信技术的长期发展方向。
(8) 新一代图像显示技术
人类所获得的信息有 80% 来自视觉,成像、图像处理及图像显示在工业、医疗、航空航天、军事等重要领域有着广泛的应用。新一代图像显示技术的前沿包括红外成像技术,全彩夜视技术,三维图像显示等。红外成像探测系统将以多谱段、多体制、多模式、偏振成像、分布式网络化、多传感器数据融合等技术为手段,以快速获取并发掘利用各种目标的多维动态信息并更准确地识别、跟踪为目标,进入高分辨、大视场、多维以及多传感器协同工作的新阶段。全彩夜视能还原夜晚景物的真实色彩,克服传统夜视成像技术无彩色,亮度暗,对比度差等缺陷,目前国内外研究主要基于图像融合、颜色转换等方法实现全彩夜视。三维显示技术能展现物体的深度感、层次感、空间位置等信息,使人获取与现实事物一致的三维信息,包括体三维显示、全息三维显示和集成成像三维显示等。三维显示技术是当今国际信息电子产业的最前沿研究方向之一,而光电子产业的迅猛发展也必将推动三维显示技术的产业化进程。
(9) 飞行器起降与飞行
飞行器广泛应用于交通运输、勘探测量和军事侦察等领域。目前飞行器技术的开发前沿包括飞行器的垂直起降和飞行控制两方面的内容,前者包括飞行器的低空、低速性能,以及垂直起降和悬停功能;后者包括飞行器的自主控制,其中涉及到飞行器本体设计、环境感知、地图、定位、导航和避障多方面技术。近年来,飞行器的发展方向集中在无人飞行器方面,即实现飞行器自主控制的智能化形态,提高飞行器的自主性、适应性和稳定性;并实现多飞行器间的协同侦察、协同跟踪与碰撞预警, 构成多机集群系统。飞行器的飞行管理系统需要针对环境信息的多边性以及任务的多样性,进行飞行器的轨迹规划和动作部署,实现单个飞行器的路径和姿态的实时控制以及多个飞行器的集群控制。此外,为了适应多种任务环境的切换,飞行器外形的可变构型设计、长航时动力系统、高抗干扰多模态控制、高速高精度轨迹跟踪自适应控制以及运动过程中的障碍物检测、预测和避障技术等也是飞行器技术未来的发展趋势。
(10) 新型发动机技术
发动机是借助工质的状态变化将燃料燃烧产生的热能转变为机械能,从而为系统提供动力的装置, 决定着系统的动力性、经济性、稳定性和环保性。近年来,发动机在新型技术的驱使下不断向高效能、低油耗和少污染方向发展。发动机直喷技术优化了进气混合效率,在高效节油同时实现大功率输出; 可变气门正时技术能够满足发动机高速功率和低速转矩的要求;发动机增压技术能够在整个转速范围内提高燃烧效率,节约燃油并改善排放;废气再循环技术大幅度减少了机械损失和泵机损失的同时降低了排放;可变水泵技术能够根据温度自动改变泵入发动机缸体处的冷却液流量,满足发动机在不同工作状态下的冷却需求并减少了能耗。研发提升发动机动力性能、降低油耗和减少污染的新型发动机技术仍是发动机领域的工程开发前沿。迫于环保和节能的需求,小型化和轻量化也已成为发动机发展的主要趋势之一。此外,融合传感和大数据分析技术实现发动机的健康监测也成为提高发动机可靠性的前沿技术。
《2.2 Top3 工程开发前沿重点解读》
2.2 Top3 工程开发前沿重点解读
2.2.1 MEMS 传感器
微机电系统(MEMS)是集微传感器、微执行器、微机械结构、微能源、信号处理和控制电路、接口、通信等于一体的微型器件或系统,广泛应用于高新技术产业,是一项关系到国家的科技发展、经济繁荣和国防安全的关键技术。MEMS 传感器是MEMS 器件的一个重要分支。1962 年,第一个硅微型压力传感器的问世开创了MEMS 技术的先河。2000 年至今,在声学、光学、生物和能源等领域出现了形形色色的微传感器件。MEMS 传感器门类品种繁多,按其工作原理可分为物理型、 化学型和生物型三类。按照被测量可分为加速度、压力、位移、流量、电磁场、图像、温度、气体成分以及离子浓度等类型的传感器。MEMS 传感器不仅种类繁多,而且用途广泛。作为获取信息的关键器件, MEMS 传感器对各种传感装备的微型化发展起着巨大的推动作用,已在航空航天、汽车工业、生物医学及消费电子产品等领域得到了广泛的应用。
近年来,在市场引导、科技推动、风险投资和政府介入等多重作用下,MEMS 传感器技术发展迅速,新原理、新材料和新技术的研究不断深入, MEMS 传感器的新产品不断涌现。目前,MEMS 传感器正向高精度、高可靠性、多功能集成化、智能化、微型化和微功耗方向发展。借助新型材料,如 SiC、蓝宝石、金刚石及 SOI,开发出的各种新型高可靠 MEMS 传感器,具有耐高温、耐腐蚀和防辐射等性能。纳米管、纳米线、纳米光纤、光导、超导和智能材料也将成为制作 MEMS 传感器的材料。新的 MEMS 制作和组装技术使 MEMS 传感器体积更小、功耗更低且性能更高,具有耐振动和抗冲击的能力。利用专门的集成设计和工艺能够将敏感元件和电路元件制作在同一芯片上, 完成信号检测和信号处理,构成功能强大的智能传感器,满足传感器微型化和集成化的要求。传感器集成化是实现传感器小型化、智能化和多功能的重要保证。MEMS 传感器一直是研究的前沿和重点,是各国大力发展的核心和前沿技术,引起了各国研究机构、大学和公司的高度重视。美、德、日等世界大国将 MEMS 传感器技术作为战略性的研究领域之一,纷纷制定发展计划并投入巨资进行专项研究,已显示出明显的领先优势。国内的一些高校和研究机构已着手 MEMS 传感器技术的开发和研究,但在灵敏度、可靠性及新技术
能力提升方面与国外相比还存在较大差距。许多MEMS 传感器品种尚未具备批量生产的能力,离产品的实用化和产业化还很远,有待于进一步提高和完善。
“MEMS 传感器”工程开发前沿中核心专利公开量排在前三位的国家/ 地区分别为美国(105)、德国(34)和日本(32),篇均被引频次排在前三位的国家 / 地区分别为加拿大(44.5)、荷兰(30.33)和美国(27.15),见表 2.2.1。在公开量 Top10 国家 / 地区中,美国和中国、法国均有合作,见图 2.2.1。核心专利公开量排在前三位的机构分别为 BOSC(17)、FAID(17)和 INFN(11) ,见表 2.2.2。在公开量 Top10 机构中, FAID 和 Shortcut Semiconductor Suzhou Co Ltd 合作较多,见图 2.2.2。我国公开的与“MEMS 传感器”工程开发前沿相关的核心专利有 19 项,公开较多的大陆机构为 Shortcut Semiconductor Suzhou Co Ltd。
《表 2.2.1》
表 2.2.1 “MEMS 传感器”工程开发前沿中核心专利的主要产出国家/ 地区
| 序号 | 国家 / 地区 | 公开量 | 公开量比例 | 被引数 | 被引数比例 | 平均被引数 |
| 1 | USA | 105 | 46.26% | 2851 | 49.88% | 27.15 |
| 2 | Germany | 34 | 14.98% | 808 | 14.14% | 23.76 |
| 3 | Japan | 32 | 14.10% | 822 | 14.38% | 25.69 |
| 4 | China | 19 | 8.37% | 371 | 6.49% | 19.53 |
| 5 | France | 6 | 2.64% | 125 | 2.19% | 20.83 |
| 6 | South Korea | 6 | 2.64% | 94 | 1.64% | 15.67 |
| 7 | Taiwan of China | 4 | 1.76% | 82 | 1.43% | 20.5 |
| 8 | Italy | 3 | 1.32% | 51 | 0.89% | 17 |
| 9 | The Netherlands | 3 | 1.32% | 91 | 1.59% | 30.33 |
| 10 | Canada | 2 | 0.88% | 89 | 1.56% | 44.5 |
《表 2.2.2》
表 2.2.2 “MEMS 传感器”工程开发前沿中核心专利的主要产出机构
| 序号 | 机构 | 公开量 | 公开量比例 | 被引数 | 被引数比例 | 平均被引数 |
| 1 | BOSC | 17 | 7.49% | 385 | 6.74% | 22.65 |
| 2 | FAID | 17 | 7.49% | 475 | 8.31% | 27.94 |
| 3 | INFN | 11 | 4.85% | 248 | 4.34% | 22.55 |
| 4 | TOKE | 7 | 3.08% | 182 | 3.18% | 26 |
| 5 | FRSE | 6 | 2.64% | 170 | 2.97% | 28.33 |
| 6 | HONE | 6 | 2.64% | 123 | 2.15% | 20.5 |
| 7 | ROEC | 6 | 2.64% | 141 | 2.47% | 23.5 |
| 8 | SHIH | 6 | 2.64% | 152 | 2.66% | 25.33 |
| 9 | SHOR | 5 | 2.20% | 121 | 2.12% | 24.2 |
| 10 | SMSU | 5 | 2.20% | 78 | 1.36% | 15.6 |
注:BOSC 表示Robert Bosch GmbH;FAID 表示Fairchild Semiconductor Corporation;INFN 表示Infineon Technologies AG;TOKE 表示Kabushiki Kaisha Toshiba;FRSE 表示Freescale Semiconductor Inc.;HONE 表示Honeywell International Inc.; ROEC 表示Rosemount Aerospace Inc.;SHIH 表示Seiko Epson Corporation;SHOR 表示Shortcut Semiconductor Suzhou Co. Ltd.;SMSU 表示Samsung Electronics Co. Ltd。
《图 2.2.1》
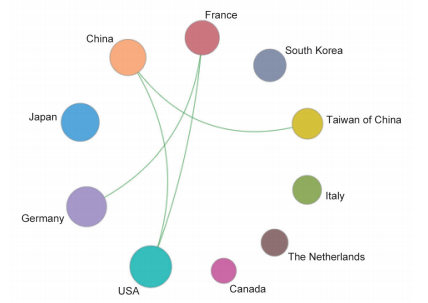
图 2.2.1 “MEMS 传感器”工程开发前沿主要产出国家/地区间的合作网络
《图 2.2.2》
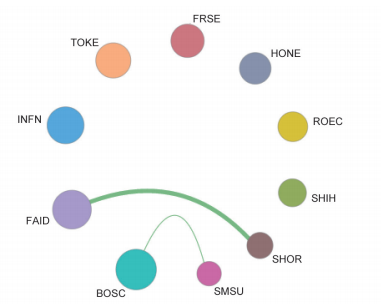
图 2.2.2 “MEMS 传感器”工程开发前沿主要产出机构间的合作网络
2.2.2 船舶新型推进系统
(1) 仿生推进系统
仿生推进在推进效率、适应特殊环境等方面具有明显优势,因此,开发仿生推进技术,是发展高性能水下航行器的重要内容之一。国内外在仿鱼类波动推进和仿生喷射推进方面展开了相关研究。其中对鱼类波动推进的研究集中在游动推进机制研究、鱼类仿生学实验研究;对鱼类仿生喷射推进模式的研究则是分析水母的推进机制和运动模式,并设计推进装置的驱动机构。同时也有将波动推进和喷射推进模式进行有机复合的多尾鳍协调推进方式。此外,还有基于升力拍翼运动的仿海龟式推进、仿鸭蹼式推进等新型推进机构。研制高效率、高机动性、低噪声、环境适应性强的推进机构,并采取有效、节能的方式驱动是仿生推进系统的技术难点所在。
(2) 机器鱼
仿生机器鱼的推进模式和体型具有隐蔽性,且机动性好、速度快、推进效率高、噪声低,在水下侦查追踪、海底探测、水质监测等一些特殊场合, 有着传统螺旋桨推动器难以比拟的优势。依据所模仿鱼类游动产生推进力的身体部位,仿生机器鱼可分为依靠身体和/或尾鳍推进(BCF)模式以及中鳍和/或对鳍推进(MPF)模式。BCF 模式适用于大多数鱼类,而采用 MPF 模式的鱼类具有较好的机动性、较高的稳定性和较强的抗干扰能力,是未来机器鱼研究领域的前沿。机器鱼的研究重点包括:①提高机器鱼的游速和推进效率;②提高机器鱼的灵活性和机动性;③快速上浮和下潜能力;④机器鱼的智能控制算法;⑤负载和续航能力,其设计和研制是机、光、电、自动控制、材料技术、密封技术和流体力学等多个学科的融合。
(3) 矢量推进系统
矢量推进系统采用推力矢量技术,通过直接改变推力方向来提供所需要的俯仰力和力矩、偏航力和力矩,代替船体操舵方式来提供操纵力,具有节省空间、摆动灵活等优点。从实现矢量推进的功能看,目前出现了多种方案,包括多推进器协作方案、机械导流板式矢量喷水推进方案、直翼推进方案和矢量螺旋桨推进方案。其中矢量螺旋桨推进方案的研究最多,先后出现了齿轮机构、连杆机构、球面并联机构、丝杠螺母机构和液压机构等机构方案。在大推力工况下,提高矢量机构的刚度、控制精度和耐海水腐蚀磨损的能力,减小其航行阻力等是研究重点。建立船舶 – 矢量推进器 – 流体系统动力学模型,提出运动 – 力 – 能量系统多目标、多变量协同设计方法和可靠的运动控制技术,是未来发展方向。
(4) 电力推进系统
船舶电力推进系统的主要特征是利用船舶综合电站向全船提供推进动力、辅机和日用电力, 完成船舶机动和相关任务的完整系统,具有较高的综合经济性、可靠性,可以提高有效舱容面积和操作性。船舶电力推进系统的技术发展主要集中在:推进装置的高效化、电能来源的绿色化和控制系统智能化。目前常用的电力推进器为吊舱推进器和全回转推进器,其中吊舱推进器集成度更高,实现了电能到机械能的同轴转化,但大功率吊舱推进器也面临着吊舱附体阻力大、轴承温升高和密封失效等难题。采用电机与螺旋桨一体化设计的无轴轮缘推进系统,功率密度高和噪声低,已成为新一代电力推进器的研究前沿。电能来源主要有柴油发电机组、动力电池、岸基电源、燃料电池和太阳能等,新型高效热能发电系统也具有广阔的发展前景。
(5) 两栖机器人可变形推进系统
两栖机器人的可变形推进系统通过综合多种常规推进方式,利用构型变换和运动模式自主切换实现其水中和陆地两栖环境下较高的机动性和环境适应性。利用模块化结构改变自身的构型,基于仿生学原理,实现模拟自然界生物的水中游动步态和陆地运动。按两栖机器人行走机构来区分,目前的两栖机器人可分为球形、腿式、轮桨一体和蛇形等几种。国内外围绕两栖机器人推进机构开展了探索性研究,并取得了一定的进展,但速度、机动性、地形适应性等服役性能相对较差,两栖活动能力难以同时得到保障。要研制出实用的水陆两栖机器人推进系统,还需解决复合推进系统建模、两栖复合推进机构设计与实现、两栖复合推进机构的运动控制与优化、水陆运动模式自主切换机制等问题。
“船舶新型推进系统”工程开发前沿中核心专利公开量排在前三位的国家 / 地区分别为中国(109)、韩国(18)和美国(11),篇均被引频次排在前三位的国家 / 地区分别为美国(9.36)、日本(7.88)和德国(5.8),见表 2.2.3。在公开量 Top10 国家 / 地区中,美国和韩国合作较多,见图 2.2.3。核心专利公开量排在前三位的机构分别为 HYMR(17)、Hangzhou Changdong Intelligent Technolog(13)和 CHSB(6),见表 2.2.4。从目前样本数据看,专利主要产出机构间基本不存在合作,见图 2.2.4。我国公开的与“船舶新型推进系统”工程开发前沿相关的核心专利有 109 项,公开较多的大陆机构为 Hangzhou Changdong Intelligent Technolog。
2.2.3 无人机
(1)飞行平台技术的发展
固定翼﹑旋翼及多旋翼这三类无人机的技术相对成熟,应用也比较广泛,尤其是多旋翼无人机占市场的 90%。近年来,出现了将固定翼和旋翼组合在一起的垂直起降无人机,这类无人机在固定翼两侧机翼上各安置两个旋翼,起飞时旋翼工作,平飞
《表 2.2.3》
表 2.2.3 “船舶新型推进系统”工程开发前沿中核心专利的主要产出国家/ 地区
| 序号 | 国家 / 地区 | 公开量 | 公开量比例 | 被引数 | 被引数比例 | 平均被引数 |
| 1 | China | 109 | 71.71% | 612 | 69.23% | 5.61 |
| 2 | South Korea | 18 | 11.84% | 83 | 9.39% | 4.61 |
| 3 | USA | 11 | 7.24% | 103 | 11.65% | 9.36 |
| 4 | Japan | 8 | 5.26% | 63 | 7.13% | 7.88 |
| 5 | Germany | 5 | 3.29% | 29 | 3.28% | 5.8 |
| 6 | Taiwan of China | 2 | 1.32% | 8 | 0.90% | 4 |
《表 2.2.4》
表 2.2.4 “船舶新型推进系统”工程开发前沿中核心专利的主要产出机构
| 序号 | 机构 | 公开量 | 公开量比例 | 被引数 | 被引数比例 | 平均被引数 |
| 1 | HYMR | 17 | 11.18% | 68 | 7.69% | 4 |
| 2 | HANG | 13 | 8.55% | 14 | 1.58% | 1.08 |
| 3 | CHSB | 6 | 3.95% | 49 | 5.54% | 8.17 |
| 4 | UHEG | 5 | 3.29% | 32 | 3.62% | 6.4 |
| 5 | HOND | 4 | 2.63% | 33 | 3.73% | 8.25 |
| 6 | UNWP | 4 | 2.63% | 29 | 3.28% | 7.25 |
| 7 | CAZD | 3 | 1.97% | 34 | 3.85% | 11.33 |
| 8 | CSHI | 3 | 1.97% | 22 | 2.49% | 7.33 |
| 9 | MITO | 3 | 1.97% | 20 | 2.26% | 6.67 |
| 10 | BRUH | 2 | 1.32% | 8 | 0.90% | 4 |
注:HYMR 表示Hyundai Motor Company;HANG 表示Hangzhou Changdong Intelligent Technology Co. Ltd;CHSB 表示Hudong-Zhonghua Shipbuilding (Group) Co. Ltd.;UHEG 表示Harbin Engineering University;HOND 表示Honda Motor Co. Ltd;UNWP 表示Northwestern Polytechnical University;CAZD 表示Institute of Automation Chinese Academy of Sciences;CSHI 表示719th Research Institute of China Shipbuilding Industry Corporation;MITO 表示Mitsubishi Heavy Industries Ltd.;BRUH表示Brunswick Corporation。
《图 2.2.3》
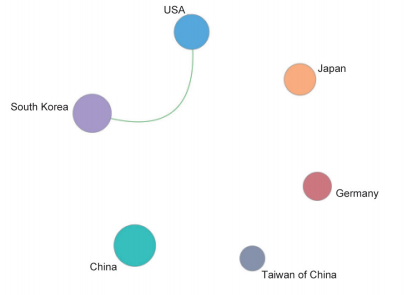
图 2.2.3 “船舶新型推进系统”工程开发前沿主要产出国家 / 地区间的合作网络
《图 2.2.4》

图 2.2.4 “船舶新型推进系统”工程开发前沿主要产出机构间的合作网络
时固定翼工作,能够完成垂直起降和空中悬停; 而两侧的可倾转旋翼在平飞时还可以增加推力。然而,此类无人机由于旋翼的桨叶半径较小,旋翼产生的升力有限,起飞重量也较小,提高其起飞重量是一个重要研究方向。此类无人机在工作时固定翼模式和旋翼模式间的切换也是一个重要研究方向。此外,可折叠式构型无人机、纳米无人机等用于特殊工作环境的无人机同样是值得深入研究的前沿领域。
(2)多无人机集群协同技术
目前大部分针对无人机的研究工作集中在单一平台技术上,而由多个无人机组成的无人机群则可以实现很多单个无人机无法实现的功能。组成无人机群的无人机不被构型和起飞重量的差异所限制, 因此这类异构多无人机集群协同技术备受瞩目。多智能体协同控制技术在地面机器人方面研究较为普遍,但是其控制方法大多基于刚体控制建模,研究的对象是二自由度运动。而在协同工作的无人机群中,单个无人机不能作为刚体考虑,其气动弹性对无人机群产生的影响也必须在多智能体模型中体现, 无人机群是一个基于六自由度运动的多体动力学模型。因此,在多无人机集群协同技术的研究中,除了航迹优化和自主飞行导航控制外,防碰撞和智能避障也是重要的研究领域。此外,基于智能算法的机载微传感器﹑多机协同飞行/ 任务管理系统和动态数据融合技术等研究也是无人机技术的研究前沿。
“无人机”工程开发前沿中核心专利公开量排在前三位的国家 / 地区分别为美国(249)、中国(62)和加拿大(8),篇均被引频次排在前三位的国家/ 地区分别为瑞士(50.33)、加拿大(40.88) 和英国(38.5),见表 2.2.5。在公开量 Top10 国家/ 地区中,英国和德国合作较多,见图 2.2.5。核心专利公开量排在前三位的机构分别为 DJII(34)、BOEI(31)和 GOOG(16),见表 2.2.6。从目前样本数据看,专利主要产出机构之间基本不存在合作,见图 2.2.6。我国公开的与“无人机”工程开发前沿相关的核心专利有 62 项,公开较多的大陆机构为 DJII。
《表 2.2.5》
表 2.2.5 “无人机”工程开发前沿中核心专利的主要产出国家/ 地区
| 序号 | 国家 / 地区 | 公开量 | 公开量比例 | 被引数 | 被引数比例 | 平均被引数 |
| 1 | USA | 249 | 67.12% | 6740 | 68.21% | 27.07 |
| 2 | China | 62 | 16.71% | 1428 | 14.45% | 23.03 |
| 3 | Canada | 8 | 2.16% | 327 | 3.31% | 40.88 |
| 4 | Germany | 7 | 1.89% | 195 | 1.97% | 27.86 |
| 5 | France | 7 | 1.89% | 163 | 1.65% | 23.29 |
| 6 | UK | 6 | 1.62% | 231 | 2.34% | 38.5 |
| 7 | South Korea | 5 | 1.35% | 62 | 0.63% | 12.4 |
| 8 | Israel | 4 | 1.08% | 144 | 1.46% | 36 |
| 9 | Switzerland | 3 | 0.81% | 151 | 1.53% | 50.33 |
| 10 | Italy | 3 | 0.81% | 78 | 0.79% | 26 |
《表 2.2.6》
表 2.2.6 “无人机”工程开发前沿中核心专利的主要产出机构
| 序号 | 机构 | 公开量 | 公开量比例 | 被引数 | 被引数比例 | 平均被引数 |
| 1 | DJII | 34 | 9.16% | 884 | 8.95% | 26 |
| 2 | BOEI | 31 | 8.36% | 867 | 8.77% | 27.97 |
| 3 | GOOG | 16 | 4.31% | 585 | 5.92% | 36.56 |
| 4 | AMAZ | 12 | 3.23% | 123 | 1.24% | 10.25 |
| 5 | VEZN | 12 | 3.23% | 373 | 3.77% | 31.08 |
| 6 | EADS | 11 | 2.96% | 252 | 2.55% | 22.91 |
| 7 | HONE | 8 | 2.16% | 449 | 4.54% | 56.13 |
| 8 | QCOM | 8 | 2.16% | 81 | 0.82% | 10.13 |
| 9 | UNMA | 8 | 2.16% | 138 | 1.40% | 17.25 |
| 10 | DISY | 6 | 1.62% | 240 | 2.43% | 40 |
注:DJII 表示SZ DJI Technology Co. Ltd;BOEI 表示Boeing Co.;GOOG 表示Google Inc.;AMAZ 表示Amazon Technologies Inc.; VEZN 表示Verizon Patent and Licensing Inc.;EADS 表示EADS Deutschland GmbH;HONE 表示Honeywell International Inc.; QCOM 表示Qualcomm Incorporated;UNMA 表示Unmanned Innovation Inc.;DISY 表示Disney Enterprises Inc.。
《图 2.2.5》
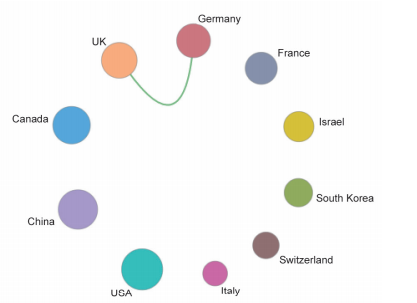
图 2.2.5 “无人机”工程开发前沿主要产出国家/ 地区间的合作网络
《图 2.2.6》

图 2.2.6 “无人机”工程开发前沿主要产出机构间的合作网络
领域课题组人员
课题组组长:段正澄 郭东明
课题组成员:
冯煜芳 杨德森 钟 掘 杜善义 唐任远
李德群 陈懋章 李魁武 王振国 黄庆学
蒋庄德 黄瑞松 黄先祥 范本尧 林尚扬
李鸿自 乐嘉陵 高金吉 郭孔辉 周志成
钱清泉 孙 聪 徐芑南 钟志华 张 璧
张立同 贾振元 钱林茂 范大鹏 李卫华
朱旻昊 陈云赛 张 珂 康瑛石 吴建军
管在林 田 野 江志斌 曾晓光 刘成良
董早鹏 史铁林 王晓俊 赵英俊 夏 奇
夏 凉 陈惜曦 龚 渤
执笔组成员:
李宝仁 熊蔡华 张海涛 严新平 李仁府
孙 博 夏 奇 夏 凉 陈惜曦 龚 渤
李俊杰 谭先华 刘智勇 谷洪刚 詹小斌











 京公网安备 11010502051620号
京公网安备 11010502051620号




