

《1 工程研究前沿》
1 工程研究前沿
《1.1 Top 10 工程研究前沿发展态势》
1.1 Top 10 工程研究前沿发展态势
机械与运载工程领域(以下简称机械领域)所研判的 Top 10 工程研究前沿涉及机械工程、船舶与海洋工程、航空宇航科学技术、兵器科学与技术、动力及电气设备工程与技术、交通运输工程等学科方向(见表 1.1.1)。其中,“高能固态锂电池”“超声速流中的减阻减热研究”“高性能微纳生物传感器”“车联网信息安全与隐私保护”“空间系留机器人自适应目标捕获控制”“基于可再生能源 / 燃料电池的混合动力系统”是传统研究的深入,“基于工业物联网的智能制造”“多机器人系统的协同控制”“基于拓扑优化和增材制造的设计与制造一体化”“智能电网的资源调度和风险评估”是新兴前沿。2013—2018 年的论文逐年发表情况见表 1.1.2,“基于可再生能源 / 燃料电池的混合动力系统”和“多机器人系统的协同控制”是近年来论文发表增速最显著的方向。
(1) 基于工业物联网的智能制造
工业物联网通过制造资源的网络互联、数据互通和系统互操作,实现制造资源的合理配置、制造过程的按需执行、制造工艺的持续优化和制造环境的快速适应,从而构建创新服务驱动的智能制造体系。当前相关研究体现在三个维度:一是智能产品全生命周期的智能感知和迭代优化,包括传感器、射频识别器等手段的感知设计、生产、物流、销售、服务等产业链海量数据并处理;二是制造系统层级的泛在连通和精准控制,包括设备层、控制层、车间层、企业层和供应链协同层的传感装置,分布式控制系统、制造执行系统、企业资源计划系统和产业链不同企业协同研发等;三是制造系统智能功能的数字建模和实时分析,包括要素协同、系统集成、信息融合和新兴业态,比如智能产品的个性化定制和预测性维修等。这些研究面临着互联互通技术和协议的复杂多样、应用实施的深度和广度各不相同、
《表 1.1.1》
表 1.1.1 机械领域 Top 10 工程研究前沿
| 序号 | 工程研究前沿 | 核心论文数 | 被引频次 | 篇均被引频次 | 平均出版年 |
| 1 | 基于工业物联网的智能制造 | 21 | 460 | 21.9 | 2017.1 |
| 2 | 高能固态锂电池 | 26 | 828 | 31.85 | 2015.4 |
| 3 | 超声速流中的减阻减热研究 | 48 | 983 | 20.48 | 2016.3 |
| 4 | 多机器人系统的协同控制 | 23 | 764 | 33.22 | 2017.1 |
| 5 | 高性能微纳生物传感器 | 45 | 1478 | 32.84 | 2016.6 |
| 6 | 车联网信息安全与隐私保护 | 17 | 617 | 36.29 | 2015.6 |
| 7 | 基于拓扑优化和增材制造的设计与制造一体化 | 5 | 86 | 17.2 | 2017 |
| 8 | 空间系留机器人自适应目标捕获控制 | 34 | 779 | 22.91 | 2015.5 |
| 9 | 基于可再生能源 / 燃料电池的混合动力系统 | 47 | 1179 | 25.09 | 2016.7 |
| 10 | 智能电网的资源调度和风险评估 | 18 | 689 | 38.28 | 2016.5 |
《表 1.1.2》
表 1.1.2 机械领域 Top 10 工程研究前沿逐年核心论文发表数
| 序号 | 工程研究前沿 | 2013 年 | 2014 年 | 2015 年 | 2016 年 | 2017 年 | 2018 年 |
| 1 | 基于工业物联网的智能制造 | 0 | 0 | 0 | 3 | 13 | 5 |
| 2 | 高能固态锂电池 | 3 | 7 | 2 | 8 | 4 | 2 |
| 3 | 超声速流中的减阻减热研究 | 3 | 5 | 5 | 10 | 14 | 11 |
| 4 | 多机器人系统的协同控制 | 0 | 2 | 1 | 0 | 10 | 10 |
| 5 | 高性能微纳生物传感器 | 2 | 2 | 5 | 4 | 23 | 9 |
| 6 | 车联网信息安全与隐私保护 | 2 | 2 | 2 | 6 | 5 | 0 |
| 7 | 基于拓扑优化和增材制造的设计与制造一体化 | 0 | 0 | 1 | 0 | 2 | 2 |
| 8 | 空间系留机器人自适应目标捕获控制 | 2 | 6 | 5 | 14 | 7 | 0 |
| 9 | 基于可再生能源 / 燃料电池的混合动力系统 | 0 | 1 | 3 | 16 | 17 | 10 |
| 10 | 智能电网的资源调度和风险评估 | 0 | 0 | 3 | 5 | 8 | 2 |
网络和数据安全的隐患众多等挑战,为此,近年来5G 新型移动网络、人 – 信息 – 物理系统、软件定义网络、边缘计算、数字孪生等技术成为基于工业物联网的智能制造研究前沿和发展趋势。
(2)高能固态锂电池
目前广泛使用的液态锂电池在能量密度、安全性等关键指标上已接近理论或工程极限,必须发展新型储能模式才能满足未来发展的需求。固态电池采用固态电解质替代传统有机小分子液态电解质, 从而在能量密度、安全性和循环寿命等方面具有潜在优势,被认为是最具颠覆性影响的下一代化学电源。固态电池前沿技术主要涉及到表 / 界面传质、匹配性关键材料、低界面阻抗制备技术、全寿命周期性能演化机理等前沿科学问题。表 / 界面传质与界面阻抗是影响固态电池技术的关键,未来主要是针对界面阻抗问题开发原位分析与表征技术;高比能匹配性关键材料包括高容量 / 高电压正极材料、高性能固态电解质以及高容量金属锂负极, 是现阶段需要重点关注的领域;设计与材料匹配性的微界面、低阻抗制备工艺是解决量产化的关键;全寿命周期内电池性能衰减机理、材料体系演化途径等是固态电池健康状态评估与预测的关键。进一步开发基于长寿命固态电解质的固态金属 – 空气电池将会是电化学电源器件研究的终极目标,其理论容量接近燃油比能密度,因而将会是未来研究的重点和发展趋势。
(3) 超声速流中的减阻减热研究
超声速流中的减阻减热主要针对固体表面与气体或等离子体相对运动速度马赫数 3 以上的流动进行研究,这类流动主要发生于高超声速飞行器、航天器再入大气层、高空高速侦察机或喷气式发动机的喷管内流等情形,这类情形经常伴随着强烈的气动加热、空气电离、激波、燃烧等问题。理论上通常牵涉等离子体流动、激波、稀薄空气动力学、复杂流动情形下的传热等问题,用现有的使用较广的基于 Navier-Stokes 方程的数值仿真方法只能勉强模拟以上问题,还需要强化研究基于蒙特卡洛直接模拟法和 Fokker-Planck 方程的方法,真实实验方法要进一步发展高速高温风洞及可耐受高温高冲击力的传感技术。目前主要使用在飞行器前端增加针状物、逆向喷流、边界层内喷流、等离子体边界层控制、激光能量沉积、飞行器底部排气、在表面制备烧蚀牺牲层、在内表面制备隔热层等方法来实现超声速流中的减阻减热,对在复杂曲面制造射流孔及供气系统、实验技术和数值仿真技术都提出了很高要求。
(4) 多机器人系统的协同控制
多机器人系统由一系列交互机器人组成,各个机器人之间通过通信、协调、调度、合作和控制等方式表达系统的结构,功能和行为特性,表现出高度协调的集群动力学行为,完成单个机器人难以完成的复杂工作。由于计算机科学,人工智能和自动化科学等学科的交叉渗透发展,多机器人系统已成为工程控制学科的前沿问题,在解决实际问题的过程中具有很强的鲁棒性和可靠性。传统的多机器人生产系统通常采用集中控制结构,难以适应小批量、多品种的生产方式,缺乏敏捷制造的能力;随着制造业向大型、复杂、动态和开放的方向发展,其复杂作业往往需要多个机器人协同工作,因此亟需研究具有更好的顺应性、一致性和优化性能的多机器人系统。
(5) 高性能微纳生物传感器
微纳生物传感器技术是生化信息检测的重要方向,融合生物、电子、纳米等高新技术,正在向小型便携、实时快速、高灵敏、集成化和低成本方向发展,在医学诊疗、食品分析、环境检测等领域具有重要应用。高性能微纳生物传感器主要发展方向包括免疫传感器、表面等离子体共振生物传感器、真菌毒素超痕量传感检测、肿瘤生物标志物检测等。目前生物传感器在真菌毒素检测、肿瘤细胞检测等应用中面临着灵敏度、选择性不足的问题,迫切需要开发超痕量高选择性微纳生物传感器件。基于具有优异生物兼容性的新型纳米材料如金属硫化物量子点、纳米复合材料、氧化石墨烯、二维纳米材料等开发超痕量高选择性微纳传感器,可以极大提升器件的灵敏度、响应速度和选择性,因而成为了该领域的研究重点和发展趋势。
(6) 车联网信息安全与隐私保护
车联网是无线通信技术与现代汽车工业结合产生的一种新型智能系统,其融合了大数据、云计算、人工智能等先进技术,在道路规划、资源调度、改善交通等方面做出了巨大贡献。但是,由于车联网具有网络规模庞大、通信环境开放、移动轨迹可预判等特点,使得其极易遭受攻击从而引发系统崩溃与隐私泄露等一系列安全问题。因此,保障车联网系统与数据安全受到了学术界与汽车工业界的广泛关注。在安全通信研究方面,由于基于公开密钥基础设施(PKI)的数字签名通信开销大,聚合签名与周期性证书忽略等方案的提出使得验证效率与通信效率得以提升;在身份隐私保护研究方面,匿名认证、共享证书、群签名等方案的提出可减少使用唯一证书的车辆数目,从而增强用户隐私;在位置隐私保护方面,k– 匿名、混合区、群导航等方案的提出可混淆车辆位置信息,使得位置服务器无法区分真实请求,从而加强位置隐私保护。以上科研进展有效提升了车联网的通信效率与安全性。然而, 在无人驾驶技术高速发展的今天,车联网将面临更复杂的网络环境与更庞大的数据处理量,其信息安全与隐私保护研究任重道远。
(7) 基于拓扑优化和增材制造的设计与制造一体化
拓扑优化与增材制造是近年来发展的先进设计与制造新方法、新技术,是传统设计与制造模式的重大革新,两者的有机融合代表了以“性能优先” 为宗旨的创新研制模式发展趋势,成为引领我国高端装备设计制造一体化技术发展的重要学术研究前沿。目前拓扑优化与增材制造的结合大多是尝试采用增材制造加工拓扑优化设计样件的串行模式,而直接面向增材制造的拓扑优化设计方法研究仍然较为有限。一方面,大量增材制造构件仍然沿用基于铸造、钣金、机械加工等传统工艺要求而进行设计,难以充分发挥增材制造的优势与潜力; 另一方面,现有拓扑优化方法未从多材料、多尺度、多组件集成的整体角度考虑结构的性能设计, 在设计中较少考虑增材制造工艺约束,特别是增材制造工艺约束对设计构型的影响,使得现有结构设计制造串行模式不可避免地牺牲了结构性能。目前已开展的研究虽然已取得初步成效,但仍未能从材料 – 结构 – 工艺一体化的深度上揭示其设计原理,所蕴含的增材制造材料结构力学行为建模、工艺约束影响机理、复杂整体结构拓扑优化设计、设计工具开发和应用构成了增材制造与结构创新设计融合的瓶颈难题。
(8) 空间系留机器人自适应目标捕获控制
随着人类太空探索事业的不断发展,失效或退役的航天器逐年增加,轨道垃圾也不断累积,因此利用机器人进行空间目标捕获以达到清理轨道垃圾的目的,正在逐渐成为当前航天技术研究的前沿之一。空间系留机器人是主动进行目标捕获和拖曳的有效解决方案,尤其适用于对复杂运动的大型空间碎片进行捕获。由于空间系留机器人在对目标进行捕获和拖曳时,容易与目标发生冲击、碰撞、摆动或翻滚等动力学行为,为克服这些行为带来的影响, 空间系留机器人需要做到灵巧、轻便,并具有成本效益。在微重力或真空环境下,空间系留机器人技术的关键在于基于视觉的姿态测量技术和协调控制系统。为保证空间系留机器人在太空运行的可靠性, 对其目标捕获过程中的碰撞分析、动力学演化及其控制设计都具有重要意义。
(9) 基于可再生能源 / 燃料电池的混合动力系统
传统内燃机汽车的普及在给人们带来方便舒适的现代生活的同时,也带来了严重的环境污染和能源危机。为了有效地应对能源和环境问题,各国都在大力开展绿色能源以及可再生能源的应用和研究。基于可再生能源 / 燃料电池的混合动力系统以其无污染、零排放等性能优势逐渐成为汽车领域的研究前沿之一。可再生能源 / 燃料电池的运行温度范围广、功率密度高、稳定性好。因此,可再生能源 / 燃料电池是未来解决能源和环境问题的首选动力源。目前,一般采用主、辅能量源共同供电的多能源动力系统结构。由于混合动力系统多样,控制复杂,且可再生能源/ 燃料电池本身动态性能较弱, 研究混合动力系统结构及其优化,并选用合理的控制策略以恰当分配各能量源的功率是目前混合动力系统研究的核心问题。
(10) 智能电网的资源调度与风险评估
智能电网是以物理电网为基础,将现代先进传感测量技术、通信技术、信息技术、计算机技术和控制技术与物理电网高度集成而形成的新型电网。通过集成应用分布式智能、宽带通信以及自动控制系统,可保证电网各成员之间的无缝连接与实时互动,使电网更加可靠安全、经济高效、环境友好。建立智能电网的关键技术包括坚强、灵活电网结构的建立;可再生能源和分布式能源的接入;开放式电力信息通信系统的集成以及高效应急调度中心网络的构建等。随着人类社会对电力依赖程度的加重, 电力系统规模不断扩大,电网运行的潜在风险也越来越多,资源调度任务变得更加复杂且繁重,针对智能电网开发新型资源调度与风险评估方法,提升电力系统的弹性、安全性与可靠性,已成为该领域的研究前沿和发展趋势。
《1.2 Top 3 工程研究前沿重点解读》
1.2 Top 3 工程研究前沿重点解读
1.2.1 基于工业物联网的智能制造
为应对新工业革命下的全球竞争,“德国工业 4.0”“美国先进制造”“中国制造 2025”“英国工业 2050”“日本再兴战略”等国家发展战略将智能制造列为制造业未来发展的重要方向。作为智能制造的关键使能技术,工业物联网研究已经全面渗透到了智能制造的各个领域,包括制造领域实体间的互联互通技术与方法、制造领域中数据信息建模与流动、制造领域创新应用模式和制造资源优化配置研究等。当前基于工业物联网的智能制造研究前沿和发展趋势,主要从三个维度(生命周期、系统层级和智能功能)、六个方向(智能感知、泛在连通、精准控制、数字建模、实时分析和迭代优化)上展开,积累了大量的理论方法及工程实践。
在维度上,当前生命周期维度研究工业物联网在系统架构生命周期的所有环节的应用,包括设计、生产、物流、销售、服务等一系列相互联系的价值创造活动组成的链式集合,侧重企业之间的协同互联;系统层级维度研究工业物联网在设备层、控制层、车间层、企业层和供应链协同层的应用,偏重企业内部的互联互通;智能功能维度研究工业物联网在要素协同、系统集成、信息融合和新兴业态中的应用,偏重制造到服务的转型,以及新的业务形态,比如产品预测性维修等。在方向上,当前工业物联网的智能感知研究,探索高效利用传感器、射频识别等感知手段获取产品全生命周期内的不同维度的信息数据方法;泛在连通研究制造资源数据的互联互通方法,包括机器与机器、机器与人、机器与环境之间的互联互通技术;数字建模研究制造资源到数字空间的映射,包括工业物联网下生产过程全要素的抽象建模;实时分析研究制造资源数据的直观化和可视化分析,探究工业资源状态在虚拟空间和现实空间的内在联系;精准控制研究工业物联网下制造资源精准的信息交互和无间隙协作;迭代优化研究工业物联网体系的自我学习与提升方法, 探究制造资源、制造过程、制造工艺和制造环境的优化配置。
尽管基于工业物联网的智能制造在三个维度和各个方向取得重要进展,但仍面临着互联互通技术和协议的复杂多样、应用实施的深度和广度各不相同、网络和数据安全隐患众多等问题和挑战。近年来,人 – 信息 – 物理系统、5G 新型移动、网络软件定义网络、边缘计算、数字孪生等得到了广泛的重视,包括三元体系与框架,大带宽、低时延和大连接通信,自动化和可编程网络,设备端本地计算, 虚拟数字空间和物理设备空间映射等。
“基于工业物联网的智能制造”工程研究前沿中核心论文发表量排在前三的国家 / 地区分别为中国(7)、德国(6)、瑞典(6)和意大利(6), 篇均被引频次排在前三的国家/ 地区为德国(38)、巴西(28)和法国(23.75),见表 1.2.1。在发文量Top 10 国家/ 地区中,中国、瑞典和瑞士合作较多, 见图 1.2.1。核心论文发文量排在前三的机构分别为 ABB Corp Res(4)、Beijing Univ Posts & Tele- commun(3)、Tsinghua Univ(3) 和 Univ Padua(3),篇均被引频次排在前三的机构分别为 Asea Brown Boveri Corp Res(34)、Cisco Syst(34)和Ctr Commun Syst Res(34),见表 1.2.2,在发文量 Top 10 机构中 ABB Corp Res、Beijing Univ Posts & Telecommun 和 Tsinghua Univ 间合作较 多,见图 1.2.2。施引核心论文发文量排在前三的国家 / 地
《表 1.2.1》
表 1.2.1 “基于工业物联网的智能制造”工程研究前沿中核心论文的主要产出国家/ 地区
| 序号 | 国家 / 地区 | 核心论文数 | 论文比例 | 被引频次 | 被引频次比例 | 篇均被引频次 |
| 1 | China | 7 | 33.33% | 97 | 21.09% | 13.86 |
| 2 | Germany | 6 | 28.57% | 228 | 49.57% | 38 |
| 3 | Sweden | 6 | 28.57% | 106 | 23.04% | 17.67 |
| 4 | Italy | 6 | 28.57% | 76 | 16.52% | 12.67 |
| 5 | USA | 5 | 23.81% | 70 | 15.22% | 14 |
| 6 | Switzerland | 4 | 19.05% | 68 | 14.78% | 17 |
| 7 | France | 4 | 19.05% | 95 | 20.65% | 23.75 |
| 8 | Canada | 3 | 14.29% | 66 | 14.35% | 22 |
| 9 | Brazil | 2 | 9.52% | 56 | 12.17% | 28 |
| 10 | South Korea | 2 | 9.52% | 22 | 4.78% | 11 |
《表 1.2.2》
表 1.2.2 “基于工业物联网的智能制造”工程研究前沿中核心论文的主要产出机构
| 序号 | 机构 | 核心论文数 | 论文比例 | 被引频次 | 被引频次比例 | 篇均被引频次 |
| 1 | ABB Corp Res | 4 | 19.05% | 39 | 8.48% | 9.75 |
| 2 | Beijing Univ Posts & Telecommun | 3 | 14.29% | 49 | 10.65% | 16.33 |
| 3 | Tsinghua Univ | 3 | 14.29% | 49 | 10.65% | 16.33 |
| 4 | Univ Padua | 3 | 14.29% | 43 | 9.35% | 14.33 |
| 5 | City Univ Hong Kong | 2 | 9.52% | 39 | 8.48% | 19.5 |
| 6 | KTH | 2 | 9.52% | 44 | 9.57% | 22 |
| 7 | Royal Inst Technol | 2 | 9.52% | 14 | 3.04% | 7 |
| 8 | Asea Brown Boveri Corp Res | 1 | 4.76% | 34 | 7.39% | 34 |
| 9 | Cisco Syst | 1 | 4.76% | 34 | 7.39% | 34 |
| 10 | Ctr Commun Syst Res | 1 | 4.76% | 34 | 7.39% | 34 |
《图 1.2.1》
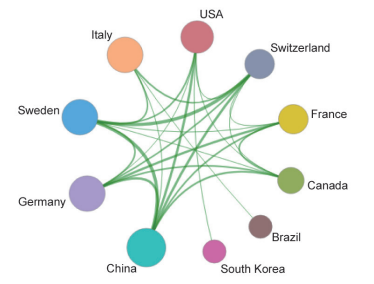
图 1.2.1 “基于工业物联网的智能制造”工程研究前沿主要国家 / 地区间的合作网络
《图 1.2.2》
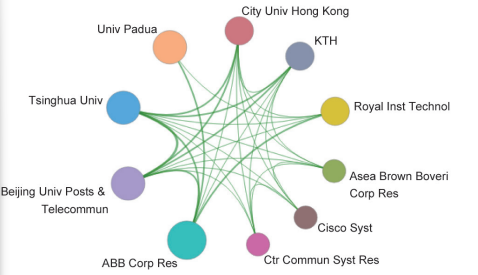
图 1.2.2 “基于工业物联网的智能制造”工程研究前沿主要机构间的合作网络
区分别为中国(71)、意大利(61)和美国(52), 见表 1.2.3。施引核心论文的主要产出机构分别为ABB Corp Res(12)、Natl Res Council Italy(11)、Univ Fed Santa Catarina(7) 和 Univ Padua(7), 见表 1.2.4。
1.2.2 高能固态锂电池
液态电解质锂电池受限于材料体系和器件结构模式,在能量密度、安全性、循环寿命等关键指标上已接近理论值或工程极限,进一步通过材料或工艺改良很难在关键性能上获得大幅度的提升。因此, 必须发展新型储能材料和与之匹配的器件结构才能从根本上满足未来高比能的需求。液态电解质因采用易燃、易降解的小分子有机溶剂,在电化学反应过程中产生副反应从而引发系列连锁反应而导致电池性能衰减。固态电池采用固态电解质替代传统有机小分子液态电解质,有效避免小分子副反应的同时匹配高电压正极,且能选用更紧凑的结构模式, 从而在能量密度、安全性和循环寿命等方面具有巨大优势,被认为是最具潜力的下一代高比能电化学电源。
尽管固态电池具有良好的潜在优势,要实现固态电池的产业化还面临几个主要的挑战。首先是高性能固态电解质,要满足倍率条件下的高离子传导率,也要满足制备工艺中的温和工艺条件以避免对微结构的破坏;基于人工智能材料基因组与机器学
《表 1.2.3》
表 1.2.3 “基于工业物联网的智能制造”工程研究前沿中施引核心论文的主要产出国家/ 地区
| 序号 | 国家 / 地区 | 施引核心论文数 | 施引核心论文比例 | 平均施引年 | |
| 1 | China | 71 | 18.88% | 2017.8 | |
| 2 | Italy | 61 | 16.22% | 2017.6 | |
| 3 | USA | 52 | 13.83% | 2018 | |
| 4 | Germany | 47 | 12.50% | 2017.7 | |
| 5 | Sweden | 27 | 7.18% | 2017.7 | |
| 6 | UK | 22 | 5.85% | 2017.9 | |
| 7 | Brazil | 22 | 5.85% | 2017.9 | |
| 8 | South Korea | 20 | 5.32% | 2017.7 | |
| 9 | Spain | 20 | 5.32% | 2017.8 | |
| 10 | France | 19 | 5.05% | 2017.6 | |
《表 1.2.4》
表 1.2.4 “基于工业物联网的智能制造”工程研究前沿中施引核心论文的主要产出机构
| 序号 | 机构 | 施引核心论文数 | 施引核心论文比例 | 平均施引年 | |
| 1 | ABB Corp Res | 12 | 15.79% | 2017.7 | |
| 2 | Natl Res Council Italy | 11 | 14.47% | 2017.4 | |
| 3 | Univ Fed Santa Catarina | 7 | 9.21% | 2017.9 | |
| 4 | Univ Padua | 7 | 9.21% | 2017.3 | |
| 5 | KTH Royal Inst Technol | 6 | 7.89% | 2017.8 | |
| 6 | Beijing Univ Posts & Telecommun | 6 | 7.89% | 2017.8 | |
| 7 | Berlin Sch Econ & Law | 6 | 7.89% | 2017.3 | |
| 8 | Old Dominion Univ | 6 | 7.89% | 2018.2 | |
| 9 | National Institute of Standards and Technology | 5 | 6.58% | 2017.6 | |
| 10 | Univ Texas Dallas | 5 | 6.58% | 2018.4 | |
习的前沿技术为高性能固态电解质材料的设计、开发提供了高效途径,从而摒弃传统试错模式下的材料开发,将会极大地促进固态电池的产业化发展。另一个挑战主要涉及到与材料匹配的制备技术,以表/ 界面传质与界面阻抗为核心的关键工艺与装备, 材料体系、结构工艺的改变必定需要系统性的改变来匹配制造工艺,一体化、卷对卷制备工艺是现阶段重点关注的工程技术方向。另外一个瓶颈是全寿命周期性能演化规律及其机理尚不明确,实况下全寿命周期的监测耗时太长(>10 年),给演化机理的研究带来巨大挑战;具有大数据分析和深度学习能力的人工技术的应用将会解决全寿命周期内的电池性能衰减机理、材料体系演化途径。
固态电池在一定程度上能满足高比能要求,但是基于固态电解质材料的金属 – 空气电池理论容量(11 430 Wh/kg)接近燃油比能密度,将会是电化学电源器件研究的终极目标,因而是未来研究的前沿和发展趋势。针对固态金属 – 空气电池的研究主要面临空气正极副反应的抑制、金属负极稳定化以及循环性能的提升,关键科学与工程化前沿涉及到催化机理研究、空气电池结构设计、成组与电源管理等,未来在关键材料体系、工程与工艺等方面将是关注的重点。
“高能固态锂电池”工程研究前沿中核心论文发表量排在前三的国家 / 地区分别为印度(20)、斯洛文尼亚(5)、美国(2)和匈牙利(2),篇均被引频次排在前三的国家 / 地区为斯洛文尼亚(39.20)、印度(30.35)和美国(28),见表 1.2.5。在发文国家 / 地区中,印度和匈牙利间合作较多, 见图 1.2.3。核心论文发文量排在前三的机构分别为 Inst Chem Technol(17)、Univ Ljubljana(5) 和 Jozef Stefan Inst(3),篇均被引频次排在前三的机构分别为 Jozef Stefan Int Postgrad Sch(55.50)、Jozef Stefan Inst(49.67)和 Univ Ljubljana(39.20), 见表 1.2.6,在发文机构中 Univ Ljubljana、Jozef Stefan Inst 和 Jozef Stefan Int Postgrad Sch 间合作较多,见图 1.2.4。
施引核心论文发文量排在前三的国家 / 地区分别为中国(113)、印度(100)、马来西亚(30) 和意大利(30),见表 1.2.7。施引核心论文的主要产出机构分别为 Inst Chem Technol(50)、Univ Ljubljana(16)、Chinese Acad Sci(13) 和 Univ Malaya(13),见表 1.2.8。
1.2.3 超声速流中的减阻减热研究
现阶段对于超声速流中的问题大都使用基于Navier-Stokes 方程的数值仿真方法进行理论研究, 由于缺乏相对成熟的软件系统,很少使用基于蒙特卡洛直接模拟法和 Fokker-Planck 方程的方法, 但是只有使用上述方法才能更好地模拟稀薄空气条件、激波和有等离子体的情形。现有的高超风洞已经可以较好地进行相关的实验,并提供了较成熟的非接触式测试技术,但是缺乏可耐受 1000 ℃高温和高冲击力的传感技术进行接触式测试,难以对很
《表 1.2.5》
表 1.2.5 “高能固态锂电池”工程研究前沿中核心论文的主要产出国家/ 地区
| 序号 | 国家 / 地区 | 核心论文数 | 论文比例 | 被引频次 | 被引频次比例 | 篇均被引频次 | |
| 1 | India | 20 | 76.92% | 607 | 73.31% | 30.35 | |
| 2 | Slovenia | 5 | 19.23% | 196 | 23.67% | 39.2 | |
| 3 | USA | 2 | 7.69% | 56 | 6.76% | 28 | |
| 4 | Hungary | 2 | 7.69% | 48 | 5.80% | 24 | |
| 5 | China | 1 | 3.85% | 25 | 3.02% | 25 | |
《表 1.2.6》
表 1.2.6 “高能固态锂电池”工程研究前沿中核心论文的主要产出机构
| 序号 | 机构 | 核心论文数 | 论文比例 | 被引频次 | 被引频次比例 | 篇均被引频次 | |
| 1 | Inst Chem Technol | 17 | 65.38% | 528 | 63.77% | 31.06 | |
| 2 | Univ Ljubljana | 5 | 19.23% | 196 | 23.67% | 39.2 | |
| 3 | Jozef Stefan Inst | 3 | 11.54% | 149 | 18.00% | 49.67 | |
| 4 | Jozef Stefan Int Postgrad Sch | 2 | 7.69% | 111 | 13.41% | 55.5 | |
| 5 | Univ West Hungary | 2 | 7.69% | 48 | 5.80% | 24 | |
| 6 | Malaviya Natl Inst Technol | 2 | 7.69% | 39 | 4.71% | 19.5 | |
| 7 | Ecol Engn Inst Ltd | 1 | 3.85% | 29 | 3.50% | 29 | |
| 8 | FJP CCN Domzale Kamnik Doo | 1 | 3.85% | 29 | 3.50% | 29 | |
| 9 | Clarkson Univ | 1 | 3.85% | 31 | 3.74% | 31 | |
| 10 | Ecosphere Energy Serv LLC | 1 | 3.85% | 31 | 3.74% | 31 | |
多流动传热细节进行有效测试,研究基于氮化硅、蓝宝石、铂合金等材质的可耐受高温的传感器有望解决这类问题,对传感系统本身的隔热、制冷技术也提出了很高要求。
《图 1.2.3》
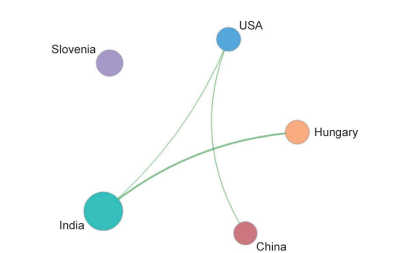
图 1.2.3 “高能固态锂电池”工程研究前沿主要国家/ 地区间的合作网络
针对高超声速飞行器、航天器再入大气层的问题,气流速度可达马赫数 6 以上,伴随着强烈的气动加热、空气电离、气动载荷等问题,而且主要在超高空、临近空间等位置,空气稀薄,理论上很难再用基于 Navier-Stokes 方程的数值仿真方法进行理论分析。在飞行器前端增加针状物因其容易被烧蚀而淡出研究重点,目前主要使用优化气动外形、在表面制备烧蚀牺牲层、在内表面制备隔热层等方法进行隔热,已经开展研究逆向喷流、等离子体边界层控制、激光能量沉积、飞行器底部排气等方法进行减阻甚至附带减热。
针对高空高速侦察机这类问题,气流速度一般在马赫数 2.5~6,有较强的气动加热,一般不会发
《图 1.2.4》
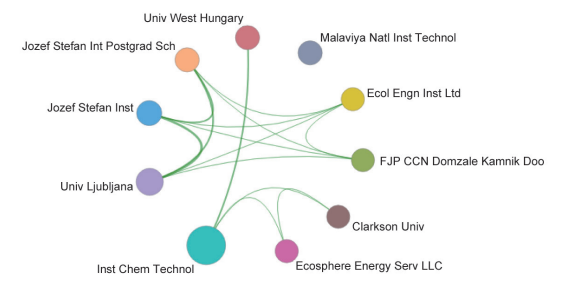
图 1.2.4 “高能固态锂电池”工程研究前沿主要机构间的合作网络
《表 1.2.7》
表 1.2.7 “高能固态锂电池”工程研究前沿中施引核心论文的主要产出国家/ 地区
| 序号 | 国家 / 地区 | 施引核心论文数 | 施引核心论文比例 | 平均施引年 |
| 1 | China | 113 | 27.49% | 2017 |
| 2 | India | 100 | 24.33% | 2016.7 |
| 3 | Malaysia | 30 | 7.30% | 2016.7 |
| 4 | Italy | 30 | 7.30% | 2016.6 |
| 5 | Iran | 29 | 7.06% | 2016.9 |
| 6 | Slovenia | 22 | 5.35% | 2016.2 |
| 7 | USA | 19 | 4.62% | 2017.1 |
| 8 | South Korea | 19 | 4.62% | 2016.6 |
| 9 | Spain | 18 | 4.38% | 2016.4 |
| 10 | Poland | 16 | 3.89% | 2017.6 |
《表 1.2.8》
表 1.2.8 “高能固态锂电池”工程研究前沿中施引核心论文的主要产出机构
| 序号 | 机构 | 施引核心论文数 | 施引核心论文比例 | 平均施引年 |
| 1 | Inst Chem Technol | 50 | 33.56% | 2016.5 |
| 2 | Univ Ljubljana | 16 | 10.74% | 2016.1 |
| 3 | Chinese Acad Sci | 13 | 8.72% | 2017.4 |
| 4 | Univ Malaya | 13 | 8.72% | 2016.5 |
| 5 | Jozef Stefan Inst | 10 | 6.71% | 2015.7 |
| 6 | Univ Chinese Acad Sci | 9 | 6.04% | 2017.1 |
| 7 | Natl Res Council of Italy | 8 | 5.37% | 2017.6 |
| 8 | Harbin Inst Technol | 8 | 5.37% | 2016.6 |
| 9 | Natl Inst Technol | 8 | 5.37% | 2017.3 |
| 10 | Korea Adv Inst Sci & Technol | 7 | 4.70% | 2016.3 |
生严重的空气电离,飞行高度一般在30 000 m 以下, 属于满足连续介质条件的环境,基本可以用基于Navier-Stokes 方程的数值仿真方法进行理论分析。可以通过在飞行器前端增加针状物进行减阻,在内表面制备隔热层等方法进行隔热。
针对喷气式发动机的喷管内流的问题,尤其是涡喷和冲压发动机,喷管扩张后的气流速度一般可达马赫数 2.5 以上,温度经常可达 1400 ℃以上, 空气基本完全等离子体化,热交换极其强烈,需要利用基于Fokker-Planck 方程的方法进行理论分析。现阶段主要研究集中于该情形下的减热方面,包括在表面制备烧蚀牺牲层、在内表面制备隔热层和边界层内喷流等方法进行热防护等,也有研究开始探索表面微结构和喷流控制流动进行减阻,进一步提高发动机效率。
“超声速流中的减阻减热研究”工程研究前沿中核心论文发表量排在前三的国家 / 地区分别为中国(34)、伊朗(10)、英国(3)和阿塞拜疆(3),篇均被引频次排在前三的国家/ 地区为伊朗(29.50)、澳大利亚(20)和中国(19.15),见表1.2.9。在发文量 Top 10 国家 / 地区中,中国、英国和阿塞拜疆间合作较多,见图 1.2.5。核心论文发文量排在前三的机构分别为 Natl Univ Def Technol(29)、Babol Noshirvani Univ Technol(5)和 Islamic Azad Univ(5),篇均被引频次排在前三的机构分别为Babol Univ Techno(l40)、Islamic Azad Univ (35.80)和 Isfahan Univ Technol(35.50),见表 1.2.10,在发文量 Top 10 机构中 Islamic Azad Univ 和 Babol Noshirvani Univ Technol 间合作较多,见图 1.2.6。施引核心论文发文量排在前 3 的国家 / 地区分别为中国(174)、伊朗(36)和印度(22),见表 1.2.11。施引核心论文的主要产出机构分别为 Natl Univ Def Technol(89)、Harbin Inst Technol(27)、Khazar Univ(15),见表 1.2.12。
《2 工程开发前沿》
2 工程开发前沿
《2.1 Top 10 工程开发前沿发展态势》
2.1 Top 10 工程开发前沿发展态势
机械与运载工程领域的 Top 10 工程开发前沿涉及机械工程、船舶与海洋工程、航空宇航科学技术、兵器科学与技术、动力及电气设备工程与技术、交通运输工程等学科方向(见表 2.1.1)。其中, “临近空间高超声速飞行器推进系统”“高效燃气涡轮发动机设计与制造技术”“波浪能发电与能量收集”“新型高效氢燃料电池”“船舶电力推进系统”“飞行器电磁隐身超材料开发与应用”是传
《表 1.2.9》
表 1.2.9 “超声速流中的减阻减热研究”工程研究前沿中核心论文的主要产出国家/ 地区
| 序号 | 国家 / 地区 | 核心论文数 | 论文比例 | 被引频次 | 被引频次比例 | 篇均被引频次 |
| 1 | China | 34 | 70.83% | 651 | 66.23% | 19.15 |
| 2 | Iran | 10 | 20.83% | 295 | 30.01% | 29.5 |
| 3 | UK | 3 | 6.25% | 30 | 3.05% | 10 |
| 4 | Azerbaijan | 3 | 6.25% | 29 | 2.95% | 9.67 |
| 5 | India | 1 | 2.08% | 15 | 1.53% | 15 |
| 6 | Japan | 1 | 2.08% | 7 | 0.71% | 7 |
| 7 | Australia | 1 | 2.08% | 20 | 2.03% | 20 |
| 8 | Pakistan | 1 | 2.08% | 8 | 0.81% | 8 |
| 9 | USA | 1 | 2.08% | 10 | 1.02% | 10 |
| 10 | Russia | 1 | 2.08% | 7 | 0.71% | 7 |
《表 1.2.10》
表 1.2.10 “超声速流中的减阻减热研究”工程研究前沿中核心论文的主要产出机构
| 序号 | 机构 | 核心论文数 | 论文比例 | 被引频次 | 被引频次比例 | 篇均被引频次 |
| 1 | Natl Univ Def Technol | 29 | 60.42% | 601 | 61.14% | 20.72 |
| 2 | Babol Noshirvani Univ Technol | 5 | 10.42% | 170 | 17.29% | 34 |
| 3 | Islamic Azad Univ | 5 | 10.42% | 179 | 18.21% | 35.8 |
| 4 | Khazar Univ | 3 | 6.25% | 29 | 2.95% | 9.67 |
| 5 | Babol Univ Technol | 2 | 4.17% | 80 | 8.14% | 40 |
| 6 | Isfahan Univ Technol | 2 | 4.17% | 71 | 7.22% | 35.5 |
| 7 | Nanjing Univ Aeronaut & Astronaut | 2 | 4.17% | 21 | 2.14% | 10.5 |
| 8 | Chinese Aerodynam Res & Dev Ctr | 2 | 4.17% | 13 | 1.32% | 6.5 |
| 9 | Amirkabir Univ Technol | 2 | 4.17% | 15 | 1.53% | 7.5 |
| 10 | Indian Inst Space Sci & Technol | 1 | 2.08% | 15 | 1.53% | 15 |
《图 1.2.5》
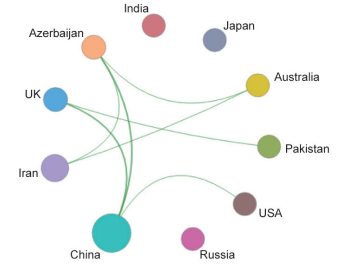
图 1.2.5 “超声速流中的减阻减热研究”工程研究前沿主要国家 / 地区间的合作网络
统研究的深入,“基于深度学习的人机智能交互系统”“生物 3D 打印制造技术”“面向无人驾驶的视觉传感与识别”“反小型无人机系统”是新兴前沿。上述各个前沿所涉及的 2013—2018 年的逐年核心专利公开量见表 2.1.2,“基于深度学习的人机智能交互系统”“面向无人驾驶的视觉传感与识别”是近年来专利公开量增速最显著的方向。
(1)临近空间高超声速飞行器推进系统
临近空间高超声速飞行器是指主要工作于临近空间区域(距地面 20~100 km)、飞行马赫数超过
《图 1.2.6》
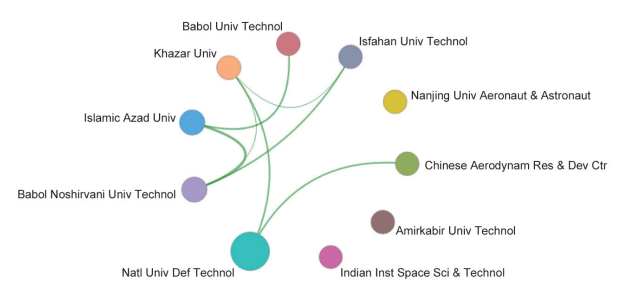
图 1.2.6 “超声速流中的减阻减热研究”工程研究前沿主要机构间的合作网络
《表 1.2.11》
表 1.2.11 “超声速流中的减阻减热研究”工程研究前沿中施引核心论文的主要产出国家/ 地区
| 序号 | 国家 / 地区 | 施引核心论文数 | 施引核心论文比例 | 平均施引年 | |
| 1 | China | 174 | 62.37% | 2017.1 | |
| 2 | Iran | 36 | 12.90% | 2017 | |
| 3 | India | 22 | 7.89% | 2017.3 | |
| 4 | Azerbaijan | 15 | 5.38% | 2018 | |
| 5 | UK | 9 | 3.23% | 2017.4 | |
| 6 | France | 7 | 2.51% | 2018 | |
| 7 | Russia | 4 | 1.43% | 2017.3 | |
| 8 | USA | 4 | 1.43% | 2017.8 | |
| 9 | Sweden | 3 | 1.08% | 2017.7 | |
| 10 | Australia | 3 | 1.08% | 2017.7 | |
《表 1.2.12》
表 1.2.12 “超声速流中的减阻减热研究”工程研究前沿中施引核心论文的主要产出机构
| 序号 | 机构 | 施引核心论文数 | 施引核心论文比例 | 平均施引年 | |
| 1 | Natl Univ Def Technol | 89 | 39.73% | 2016.6 | |
| 2 | Harbin Inst Technol | 27 | 12.05% | 2017.5 | |
| 3 | Khazar Univ | 15 | 6.70% | 2018 | |
| 4 | Babol Noshirvani Univ Technol | 14 | 6.25% | 2016.7 | |
| 5 | Beihang Univ | 13 | 5.80% | 2017.5 | |
| 6 | Nanjing Univ Aeronaut & Astronaut | 13 | 5.80% | 2017.8 | |
| 7 | Islamic Azad Univ | 12 | 5.36% | 2016.8 | |
| 8 | Northwestern Polytech Univ | 11 | 4.91% | 2017.9 | |
| 9 | Isfahan Univ Technol | 11 | 4.91% | 2017 | |
| 10 | Babol Univ Technol | 10 | 4.46% | 2017.3 | |
5 以上的一类高速飞行器,具有快响应、强突防、灵活机动等特点,是大国竞相发展的战略领域。国际上临近空间高超声速飞行器开发前沿主要包括高超声速巡航飞行器、水平起降高超声速飞机、两级入轨重复使用空天飞行器三个重点方向,而需要重点解决的共性基础与技术问题包括:飞行器总体设计与多学科优化、宽域高升阻比气动布局、高超声速推进、飞行器 / 推进系统一体化、结构热防护与能量管理、多功能结构设计优化、先进高动态控制等。在这些关键技术中,推进技术具有决定性作用, 是前沿开发领域。首先,以高超声速燃烧为基础、拓展吸气式工作边界的超高速吸气式推进技术是前沿方向,需要解决超高速气流下的燃烧组织、能量转化问题;多动力热力循环组合与匹配优化、循环工作模态转换是新型空天组合推进技术迈向实用的研究重点和关键前提,是世界各国目前研究的前沿; 宽域高效组合工作能力是基础支撑,需要融合热力循环优化、先进燃烧组织、过流部件流动控制、结构轻量化、余度控制等进行全速域综合效率提升。
(2)基于深度学习的人机智能交互系统
人机交互研究系统与用户之间的交互关系,其中系统可以是机器,也可以是程序化的系统和软件。
《表 2.1.1》
表 2.1.1 机械领域 Top 10 工程开发前沿
| 序号 | 工程开发前沿 | 公开量 | 引用量 | 平均被引数 | 平均公开年 | |
| 1 | 临近空间高超声速飞行器推进系统 | 217 | 338 | 1.56 | 2015.8 | |
| 2 | 基于深度学习的人机智能交互系统 | 603 | 1214 | 2.01 | 2017.3 | |
| 3 | 生物 3D 打印制造技术 | 195 | 363 | 1.86 | 2016.7 | |
| 4 | 高效燃气涡轮发动机设计与制造技术 | 765 | 2878 | 3.76 | 2015.4 | |
| 5 | 面向无人驾驶的视觉传感与识别 | 348 | 1745 | 5.01 | 2016.8 | |
| 6 | 波浪能发电与能量收集 | 147 | 214 | 1.46 | 2015.6 | |
| 7 | 反小型无人机系统 | 121 | 523 | 4.32 | 2016.8 | |
| 8 | 新型高效氢燃料电池 | 1464 | 1918 | 1.31 | 2015.5 | |
| 9 | 船舶电力推进系统 | 141 | 176 | 1.25 | 2015.7 | |
| 10 | 飞行器电磁隐身超材料开发与应用 | 242 | 348 | 1.44 | 2015.9 | |
《表 2.1.2》
表 2.1.2 机械领域 Top 10 工程开发前沿逐年核心专利公开量
| 序号 | 工程开发前沿 2013 年 | 2014 年 | 2015 年 | 2016 年 | 2017 年 | 2018 年 |
| 1 | 临近空间高超声速飞行器推进系统 25 | 42 | 25 | 43 | 33 | 49 |
| 2 | 基于深度学习的人机智能交互系统 16 | 14 | 23 | 48 | 130 | 372 |
| 3 | 生物 3D 打印制造技术 3 | 6 | 29 | 41 | 55 | 61 |
| 4 | 高效燃气涡轮发动机设计与制造技术 123 | 160 | 112 | 148 | 112 | 110 |
| 5 | 面向无人驾驶的视觉传感与识别 8 | 15 | 33 | 57 | 112 | 123 |
| 6 | 波浪能发电与能量收集 28 | 26 | 15 | 20 | 21 | 37 |
| 7 | 反小型无人机系统 4 | 7 | 11 | 11 | 43 | 45 |
| 8 | 新型高效氢燃料电池 253 | 257 | 216 | 208 | 263 | 267 |
| 9 | 船舶电力推进系统 21 | 24 | 16 | 21 | 39 | 20 |
| 10 | 飞行器电磁隐身超材料开发与应用 26 | 40 | 32 | 34 | 53 | 57 |
近年来,人机交互利用深度学习等人工智能技术, 研究具有多模态输入输出的新一代智能交互系统, 能够接收并处理外设指令、文字、语音、手势、表情、注视等多种输入 / 输出文本、图形、语音、手势、表情等多种信息,实现更加智能、更加自然的交互。尽管深度学习在语音识别、图像识别与分割、机器翻译等领域取得了显著的成果,远远超过以前的相关技术,但基于深度学习的人机智能交互系统尚有许多艰巨的难题亟需解决,比如语音中句法的模糊性、单词的边界界定、词义的歧义性,图像具有多物体、多目标、前景和背景具有依赖关系,深度学习算法训练方式(单节点多 GPU、多节点多 GPU 等),以及训练过程中的大量能耗等。在未来的人机交互系统中,深度学习依然是领域的前沿内容, 同时也是其中的重点和难点。
(3)生物 3D 打印制造技术
随着近年来科学技术的迅猛发展,生命组织制造及其功能再生成为人类探索的前瞻方向,制造技术与生物医学融合正在展示其巨大的科技引领作用和未来产业价值。本方向的技术含义是采用 3D 打印技术,按照生物体的结构与功能需要,制造类生命体组织,支撑生物医学的发展。近期《Science》杂志封面报道,美国研究团队提出一项具有里程碑意义的发明:一个由水凝胶 3D 打印而成的肺模型, 它具有与人体血管、气管结构相同的网络结构,能够像肺部一样朝周围的血管输送氧气,完成“呼吸” 过程,这就体现了制造技术向具有呼吸运动和传输功能的制造技术发展的趋势。以色列科学家也打印出可以跳动的人工心脏。脑科学一直是科技研究的热点,人脑具有非逻辑的思考能力,具有计算机无法实现的功能,也是人类创新的物质基础。通过认识脑细胞间的关系,进而培育和再生脑组织去发展类脑计算机,有望实现以极低的物质代谢成本产生巨大的创新和运算能力。本方向的主要研究包括以下技术方向:①复杂结构器官的制造:重点解决人体功能性器官的研究,例如心脏组织,解决组织与神经信号的协调机制,使构建的组织从简单的力学支撑组织向具有神经调控的功能组织发展,进而解决 3D 打印组织与人体宿主组织的融合共生,最终实现人体器官的再生与功能重建;②类脑组织制造: 脑组织中的神经元功能与信号发生和交换是形成思维功能的基础,其内部细胞的排列及它们在皮质各层内的类型和密度是大脑皮质分区功能的基础,从“认识脑”到“创造脑”是发展类脑计算机的方向, 在体外对脑组织进行形态和功能构建取决于对目标功能部位所对应的神经元类型、构筑结构及神经元组合的仿生设计和精确制造,是生物类脑功能 3D 打印发展的前瞻性方向;③生物能转化组织:探索人体的能量和电能的形成与释放机理,构建人工肌肉和生物电池,提供高效率的能量释放机制,形成软体组织的能量转化与释放器件,发展更为高效的能量集成与释放器件;④生物机械共生体:现有机器存在着能量转化效率低、灵活性低等局限,用活体肌肉组织或细胞驱动的生物共生机器发展具有高能量转化效率、本质安全性、运动灵活性的多自由度柔性类生命机器人。建立耦合生命体和机械体的类生命机器人多细胞 / 多材料复合制造方法,为柔性类生命机器人提供一种从运动功能需求出发、可重复、可定制的快速制造新途径。
(4) 高效燃气涡轮发动机设计与制造技术
燃气涡轮发动机,尤其是航空发动机,因其对材料、设计与制造的苛刻要求,被誉为“工业皇冠上的明珠”,一直处在工程开发的前沿,新技术不断涌现。为提升燃气涡轮发动机的各项性能,其设计与制造技术的开发前沿主要体现在以下几个方面:①叶片的设计与制造,包括低展弦比叶片、空心叶片、树脂基与陶瓷基复合材料叶片、单晶叶片、铸冷叶片、超冷叶片等;②叶盘和叶环的设计与制造,包括粉末高温合金涡轮盘,钛合金整体叶盘与整体叶环、空心双辐板涡轮盘、热等静压成型、超塑性等温锻造、高低压涡轮对转技术等;③低排放燃烧室技术,包括贫油直混(LDM)、贫油预混预蒸发(LPP)、部分蒸发和快速混合(PERM)、贫油直喷(LDI)和多点喷射贫油直喷(MP-LDI) 等;④涂层设计与制造,包括热障陶瓷涂层和耐磨涂层;⑤复杂结构增材制造与设计一体化,如燃油控制装置复杂壳体结构、喷油嘴等。
(5) 面向无人驾驶的视觉传感与识别
无人驾驶技术可以分为三大模块:感知、决策和控制。其中,环境感知技术是实现完全无人驾驶的关键,也是如今限制无人驾驶汽车发展的主要因素之一。目前无人驾驶汽车对周围目标的感知与识别主要依靠激光雷达与视觉相机。基于视觉的环境感知系统相比于雷达等具有更加丰富的图像信息。单目相机信息量小,运算速度较快,但是图像单一, 场景深度信息缺失。双目立体视觉结构相对简单, 受光照等影响较小并且提供场景信息更加丰富,可以对路况信息进行识别,受到国内外学者的青睐。近年来,由于计算机硬件技术的迅猛发展,作为双目视觉三维重建核心的立体匹配算法实时性空前提高,已经能够达到实际应用的需求。此外,对图像的分析处理是视觉识别的关键,这一功能通常由卷积神经网络实现。根据采集的图像信息智能地识别交通场景和预测交通状况,能够有效降低交通事故的发生及伤害。因此,越来越多的研究机构和高校致力于研究基于视觉的辅助驾驶与无人驾驶系统。
(6) 波浪能发电与能量收集
波浪能作为一种可再生清洁能源,具有能量密度高和分布面广等特点,其开发和利用将对解决能源危机、环境污染和气候变化等问题发挥巨大的作用。科学界对于波浪能的研究主要集中在两方面: 一是对波浪能储量和时空分布进行有效评估,以便为波浪能电站的建站选址和波浪能转换装置的设计提供有效的指导;二是对波浪能转换即发电装置的设计、开发和实验。目前,国内外波浪能发电方法依据原理主要分为振荡浮子式、越浪式、振荡水柱式和软囊式等。其中,离岸振荡浮子式相比于其他装置,具有结构简单、造价成本低、选址灵活、便于运输维护且效率较高的优点,是当今波浪能发电的主流技术。但由于海洋环境复杂多变,波浪能本身的不稳定、储量大、分布广和利用难等特点,应用于海洋之中的波浪能转换装置还易受到海洋灾害性气候的侵袭,波浪能资源在能量转换及能量收集等方面,尚有诸多艰巨的难题亟需解决,比如深化非线性波的研究、优化波浪能装置设计、提升波浪能装置响应速度和转换效率、提高波浪能装置稳定性和可靠性、降低制造和安装维护成本等。
(7) 反小型无人机系统
近年来,随着信息、控制、通信等领域技术的不断进步,无人机在民用及军事领域都得到了广泛应用。但随之而来的问题是“黑飞”无人机对公共安全甚至国家安全造成了严重威胁,因此加快无人机反制技术的研发已迫在眉睫。目前,主流反无人机技术体系主要包括无人机识别技术和无人机拦截技术。前者主要包括地面目视侦察技术、雷达探测跟踪技术、空中预警技术和卫星侦察技术,以实现无人机的探测跟踪与预警,并精准定位无人机。后者主要包括基于地面火力和高能激光武器的毁伤抓捕技术、基于电子对抗的干扰阻断技术,和基于光电、雷达等监测技术并借助数据链干扰技术的监测控制类技术。干扰阻断类技术虽然操作简单、成本较低且部分系统便于携带,但电磁干扰手段对环境要求高,易受空间其他电磁信号的影响。毁伤抓捕技术虽适用于复杂环境,但系统复杂且价格昂贵, 且会造成无人机永久损毁,不利于调查取证。干扰阻断技术对不利用外部通信控制的无人机,压制效果较差。为满足复杂环境中无人机的高效识别与捕获,未来反无人机技术的发展应朝着以下两个方向发展:①便携式、智能跟踪技术的发展;②多手段、多层次防御体系的构建。
(8) 新型高效氢燃料电池
在能源短缺与环境污染的双重压力下,世界各国对绿色高效能源技术的发展愈加重视。氢燃料电池以氢气作为燃料,通过化学反应将氢气中的化学能转化为电能,因具有清洁无污染和高能量转换效率等优点而受到广泛关注,但仍面临制氢成本高、储氢技术不成熟、输氢体系不完善等问题。新型高效氢燃料电池技术已成为新能源领域大力发展的核心前沿技术之一。其开发重点主要包括氢燃料电池核心材料、先进氢燃料电池电堆、关键辅助系统零部件、高性能氢燃料电池系统、混合型燃料电池动力系统、制氢、运氢、储氢以及加氢基础设施建设等方面。碳能源向氢能源转变将是未来能源转型的大趋势,氢燃料电池也将从新能源汽车、分布式发电等各个领域实现价值,具有广阔的发展前景。
(9) 船舶电力推进系统
船舶电力推进系统一般由电站和电站管理系统、配电系统、调速控制系统、推进电动机、监控系统和螺旋桨等组成,由推进电动机驱动螺旋桨等驱动器实现船舶的推进,广泛应用于大型油轮、水面战舰、工程船舶和潜艇等各类船舶。主要技术方向涉及发电技术、推进电机技术、谐波抑制技术、电子自动化、大功率储能技术、供配电技术、推进器技术和电机控制等技术。同时,面向船舶电力推进系统的建模与仿真分析技术,也成为提升船舶电力推进系统综合性能的重要手段之一。目前船舶电力推进系统的主要发展趋势为:以交流电力推进装置取代直流电力推进剂和交直流电力推进装置,发展超导电力推进,发展潜艇燃料电池推进系统取代铅酸电池,开发适合大功率要求的诸如磁流体推进器、喷水推进器等高效推进器,以及发展综合全电力推进系统。
(10) 飞行器电磁隐身超材料开发与应用
超材料是一种由亚波长结构单元作为基本单元构成的特种复合材料,通过对材料关键物理尺寸进行有序结构设计,使其获得常规材料不具备的超常物理性质。传统的飞行器隐身原理是通过改变雷达波反射或吸收雷达波来进行隐身,而超材料可以通过改变波的传播路线,使波发生弯曲, 以达到绕射传播的目的进而实现隐身,从而为雷达隐身吸波材料的研究提供了一个全新的思路。飞行器电磁隐身超材料的开发需要满足“ 薄、轻、宽、强”的要求,即厚度薄、重量轻、可实现宽频段(覆盖雷电波段与红外波段)吸收、具有良好的耐冲击性与耐腐蚀性,此外要易于维护。尽管目前针对飞行器电磁隐身超材料的研究已取得了一些进展与突破,但仍存在隐身频段有限、增重大、工艺复杂、难以批量化制造等问题。针对这些问题,飞行器电磁隐身超材料的研究主要集中在以下几个方向:①宽频超材料吸波结构的设计与开发;②新型可调谐有源超材料隐身技术;③新型柔性电磁隐身超材料的设计与开发;④ 3D 打印电磁隐身超材料。
《2.2 Top 3 工程开发前沿重点解读》
2.2 Top 3 工程开发前沿重点解读
2.2.1 临近空间高超声速飞行器推进系统
(1)超高速吸气式推进系统
当前,亚声速、超声速等相对低速阶段的动力推进技术发展已较为成熟,以冲压发动机为代表的马赫数 6~7 以下高超声速吸气式推进技术也在不断发展、成熟。因此发展面向更高马赫数、空天飞行需求的超高速吸气式推进技术成为重要前沿方向之一,也是空天组合推进向更高速度、更宽速域发展的必然选择。当飞行马赫数越来越高时(如飞行马赫数超过 10 时),经过进气道压缩后的燃烧室入口的马赫数也相应增加,甚至超过马赫数 5 以上, 即达到了所谓高超声速燃烧。因此在极高速度条件下,燃烧组织、能量释放成为超高速吸气式推进系统面临的首要技术难点。目前美国、澳大利亚在这方面开展诸多探索性研究与验证,2004 年美国国家航空航天局主导完成的 X-43A 第二次飞行试验, 在国际上率先实现了飞行马赫数 10 的超高速吸气式超燃冲压发动机燃烧、推进系统验证,之后美国、澳大利亚联合开展 HyShot、HyFire、HyCAUSE 等研究性飞行试验验证计划,重点开展飞行马赫数8~12 超高速流动、燃烧基础研究,在超高速吸气式推进系统验证方面取得突出进展。为了解决燃料空气混合的困难、充分利用预混激波诱导燃烧的优点,发动机前体燃料注入又被重新重视,即所谓激波诱导燃烧冲压发动机(SHCramjet),成为未来研究的前沿之一。
(2)宽域组合循环推进系统
未来水平起降高超声速飞机、空天飞行器的突出特点就是飞行马赫数、飞行高度范围极为宽广, 涵盖亚 – 跨 – 超 – 高超声速工作阶段,大大超出现有传统动力推进系统的工作能力范围。因此,组合循环推进成为必然选择,一是解决宽域工作能力问题,二是实现全速域高性能工作。目前,在传统动力基础上已发展有火箭基组合循环推进、涡轮基组合循环推进两大类组合循环推进系统方案,但面向实际应用需求仍面临性能、工程实现或任务适用性等方面的难题。从动力组成、热力循环优化出发, 探索宽适应性、高性能的新型空天组合循环推进系统方案仍然是研究前沿,基于涡轮、冲压、火箭的三组合循环推进系统是重要的发展方向。近几年来, 美国 Aerojet 针对性提出了基于涡轮、冲压、火箭的 Trijet 三组合循环推进方案,采用引射火箭冲压通道解决宽速域工作、模态转换接力问题;英国反应发动机公司提出了融合涡轮、火箭、冲压特征的协同吸气式火箭发动机(SABRE)方案,以深度预冷技术为核心,实现宽域组合循环动力。面向实用开发研制需求,当前空天组合推进系统需要重点解决热力循环匹配优化与系统集成、动力模态转换等关键问题。
(3)爆震组合推进技术
基于燃料燃烧的化学能量释放、转换,对于推进系统是十分重要的过程,燃烧有爆燃、爆震两种模式。传统航空航天动力推进装置均基于爆燃燃烧模式,已发展到相当成熟的阶段,大幅提高燃烧性能、推进效率已变得十分困难。爆震燃烧是与激波紧密耦合的超声速燃烧波,与传统发动机缓燃或爆燃不同,是具有自压缩性质的、近似等容燃烧方式, 热效率远高于等压燃烧系统。基于爆震燃烧模式有望突破现有能量循环效率瓶颈,成为具有更高性能、新型推进技术的必然选择。目前爆震燃烧模式主要聚焦在爆震燃烧组织方式上,国际上相应地提出了脉冲爆震发动机、连续爆震发动机、驻定爆震发动机,并开展了大量基础理论研究与实验验证,逐渐加深了人们对爆震现象、机理的认识,爆震燃烧越来越多从理论研究层次走向实际应用,其中连续旋转爆震燃烧方式最具潜力与优势,有望带来空天推进的颠覆性、跨越式发展。目前,掌握连续爆震燃烧传播机理机制、组织稳定可控的爆震燃烧是需要解决的核心关键问题,同时爆震燃烧模式在涡轮、冲压、火箭等传统动力类型上应用及组合循环集成是面向空天组合推进的发展重点。
“临近空间高超声速飞行器推进系统”工程开发前沿中核心专利公开量排在前三位的国家 / 地区分别为中国(100)、美国(51)和俄罗斯(40), 篇均被引频次排在前三位的国家 / 地区分别为美国(3.43)、加拿大(2.75)和中国(1.53), 见表2.2.1。在公开量Top 10 国家/ 地区中,美国和中国、加拿大有合作,见图 2.2.1。核心专利公开量排在前三位的机构分别为 UNUA(15)、UYXI(8)和BOEI(7),见表 2.2.2。从目前样本数据看,专利主要产出机构间基本不存在合作,见图 2.2.2。我国公开的与“临近空间高超声速飞行器推进系统” 工程开发前沿相关的核心专利达 100 项,排名第一。
《表 2.2.1》
表 2.2.1 “临近空间高超声速飞行器推进系统”工程开发前沿中核心专利的主要产出国家/ 地区
| 序号 | 国家 / 地区 | 公开量 | 公开量比例 | 被引数 | 被引数比例 | 平均被引数 |
| 1 | China | 100 | 46.08% | 153 | 45.27% | 1.53 |
| 2 | USA | 51 | 23.50% | 175 | 51.78% | 3.43 |
| 3 | Russia | 40 | 18.43% | 8 | 2.37% | 0.2 |
| 4 | South Korea | 6 | 2.76% | 1 | 0.30% | 0.17 |
| 5 | Canada | 4 | 1.84% | 11 | 3.25% | 2.75 |
| 6 | India | 4 | 1.84% | 0 | 0.00% | 0 |
| 7 | France | 3 | 1.38% | 2 | 0.59% | 0.67 |
| 8 | Germany | 3 | 1.38% | 1 | 0.30% | 0.33 |
| 9 | Brazil | 2 | 0.92% | 1 | 0.30% | 0.5 |
| 10 | Japan | 2 | 0.92% | 1 | 0.30% | 0.5 |
《表 2.2.2》
表 2.2.2 “临近空间高超声速飞行器推进系统”工程开发前沿中核心专利的主要产出机构
| 序号 | 机构 | 公开量 | 公开量比例 | 被引数 | 被引数比例 | 平均被引数 |
| 1 | UNUA | 15 | 6.91% | 40 | 11.83% | 2.67 |
| 2 | UYXI | 8 | 3.69% | 16 | 4.73% | 2 |
| 3 | BOEI | 7 | 3.23% | 20 | 5.92% | 2.86 |
| 4 | UNBA | 5 | 2.30% | 7 | 2.07% | 1.4 |
| 5 | UNDT | 5 | 2.30% | 6 | 1.78% | 1.2 |
| 6 | BEIT | 5 | 2.30% | 2 | 0.59% | 0.4 |
| 7 | ADCF | 4 | 1.84% | 13 | 3.85% | 3.25 |
| 8 | CAMH | 4 | 1.84% | 8 | 2.37% | 2 |
| 9 | UNAC | 4 | 1.84% | 5 | 1.48% | 1.25 |
| 10 | CAER | 4 | 1.84% | 3 | 0.89% | 0.75 |
注:UNUA 表示 Nanjing Aeronautics & Astronautics Univ;UYXI 表示 Xiamen Univ;BOEI 表示 Boeing Co.;UNBA 表示Beihang Univ;UNDT 表示 National Defence Univ of PLA;BEIT 表示 Beijing Inst Technology;ADCF 表示 Advanced Ceramic Fibers LLC;CAMH 表示 Chinese Acad Sci Inst Mechanics;UNAC 表示 United Technologies Corp.;CAER 表示 China Acad Space Technology。
《图 2.2.1》
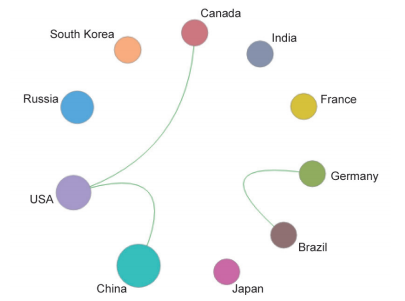
图 2.2.1 “临近空间高超声速飞行器推进系统”工程开发前沿主要产出国家 / 地区间的合作网络
《图 2.2.2》
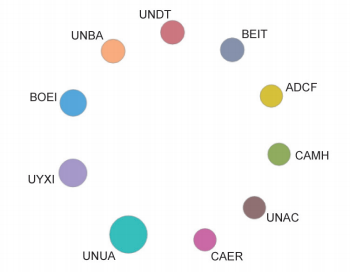
图 2.2.2 “临近空间高超声速飞行器推进系统”工程开发前沿主要产出机构间的合作网络
2.2.2 基于深度学习的人机智能交互系统
人机智能交互系统接收并处理外设指令、文字、语音、手势、表情、注视等多种输入 / 输出文本、图形、语音、手势、表情等信息,实现更加智能、更加自然的交互。近年来,人机智能交互系统逐渐应用于多个领域,如车载导航系统的语音识别技术, 可穿戴式计算机、隐身技术、浸入式游戏等领域的动作识别技术,虚拟现实、遥控机器人及远程医疗等领域的触觉交互技术,呼叫路由、家庭自动化及语音拨号等场合的语音识别技术,针对有语言障碍人士的无声语音识别技术,针对广告、网站、产品目录、杂志效用测试的眼动跟踪技术,针对有语言和行动障碍人士开发的基于脑电波的人机界面技术等。然而,人机智能系统依然存在诸多问题,如基于视觉的手势识别率低、实时性差,基于图像的多目标识别和分割准确率低,针对海量大数据的模型训练周期长、训练能耗高等问题,需要研究各种算法来改善精度和效率。
深度学习算法在数据挖掘、图像识别与分割、机器翻译、自然语言处理、多媒体学习、语音识别、推荐和个性化技术等领域都取得了显著的成果, 解决了大量、复杂的模式识别难题,促使人工智能相关技术取得了极大的进步,远远超越了已有相关技术。因此,基于深度学习的人机智能交互系统成为人机智能交互的领域前沿,同时也是其重点。但是,基于深度学习的人机智能交互系统尚有许多难题亟需解决,如语音中句法的模糊性、单词的边界界定、词义的歧义性,图像具有多物体、多目标、前景和背景具有依赖关系,深度学习算法训练方式(单节点多 GPU、多节点多 GPU 等)以及训练过程中的大量能耗等。未来的研究将从应用领域的问题出发,改进现有深度学习模型,研究新的深度学习框架,达到更高的识别精度和速度,最终实现让机器能够实时处理信息, 像人一样具有分析学习能力,能够准确分析文字、图像和声音等数据。
“基于深度学习的人机智能交互系统”工程开发前沿中核心专利公开量排在前三位的国家 / 地区分别为美国(231)、中国(225)和韩国(57), 篇均被引频次排在前三位的国家 / 地区分别为加拿大(4.9)、 美国(4.31)和印 度(2.45), 见表2.2.3。在公开量Top 10 国家/ 地区中,美国和中国、加拿大合作较多,见图 2.2.3。核心专利公开量排在前三位的机构分别为 IBMC(28)、YLIT(13) 和 SMSU(10),见表 2.2.4。从目前样本数据看, 专利主要产出机构间基本不存在合作,见图 2.2.4。
《表 2.2.3》
表 2.2.3 “基于深度学习的人机智能交互系统”工程开发前沿中核心专利的主要产出国家/ 地区
| 序号 | 国家 / 地区 | 公开量 | 公开量比例 | 被引数 | 被引数比例 | 平均被引数 |
| 1 | USA | 231 | 38.31% | 995 | 81.96% | 4.31 |
| 2 | China | 225 | 37.31% | 91 | 7.50% | 0.4 |
| 3 | South Korea | 57 | 9.45% | 19 | 1.57% | 0.33 |
| 4 | Japan | 26 | 4.31% | 7 | 0.58% | 0.27 |
| 5 | India | 20 | 3.32% | 49 | 4.04% | 2.45 |
| 6 | Canada | 10 | 1.66% | 49 | 4.04% | 4.9 |
| 7 | Germany | 5 | 0.83% | 0 | 0.00% | 0 |
| 8 | Israel | 4 | 0.66% | 3 | 0.25% | 0.75 |
| 9 | Ireland | 4 | 0.66% | 0 | 0.00% | 0 |
| 10 | Australia | 3 | 0.50% | 0 | 0.00% | 0 |
我国公开的与“基于深度学习的人机智能交互系统” 工程开发前沿相关的核心专利有 225 项,排名第二, 公开较多的大陆机构为 YLIT。
2.2.3 生物 3D 打印制造技术
生物组织的制造使得人类从木材、金属、硅材料向生命体材料发展。在这个过程中需要建立功能引导变革新进步的新产品,在研究中围绕以下方向开展工作。
(1)基于功能的生命体结构设计制造
在认识生命体自我生长特性的基础上,发展基于细胞 / 基因尺度的单元原始态与生长过程的结构与功能设计理论。突破现有的以结构设计和力学功能为主的机械设计理论,向结构、驱动、功能共生和演变的设计方法发展。需要认识细胞和基因在其自繁衍和自我复制过程中的规律,利用该规律,设计原始状态细胞的组成和结构,使得生命单元生长功能在随时间和功能的演变在设计中得以体现。具有可降解、工程强度及在一定环境下可活化、可生长的结构体的材料、制造工艺与工程控制研究。
(2)3D 打印的生命单元调控方法与活性保持
在 3D 打印中,生命体单元是进行组织生长与发育的基础,有机的细胞或基因的有机组合是后期
《表 2.2.4》
表 2.2.4 “基于深度学习的人机智能交互系统”工程开发前沿中核心专利的主要产出机构
| 序号 | 机构 | 公开量 | 公开量比例 | 被引数 | 被引数比例 | 平均被引数 |
| 1 | IBMC | 28 | 4.64% | 67 | 5.52% | 2.39 |
| 2 | YLIT | 13 | 2.16% | 0 | 0.00% | 0 |
| 3 | SMSU | 10 | 1.66% | 10 | 0.82% | 1 |
| 4 | MICT | 8 | 1.33% | 8 | 0.66% | 1 |
| 5 | EBAY | 6 | 1.00% | 1 | 0.08% | 0.17 |
| 6 | INEI | 6 | 1.00% | 1 | 0.08% | 0.17 |
| 7 | AMAZ | 5 | 0.83% | 68 | 5.60% | 13.6 |
| 8 | PURS | 5 | 0.83% | 6 | 0.49% | 1.2 |
| 9 | BOAI | 5 | 0.83% | 3 | 0.25% | 0.6 |
| 10 | DRTC | 5 | 0.83% | 0 | 0.00% | 0 |
注:IBMC 表示 Int Business Machines Corp.;YLIT 表示 Sichuan Yonglian Information Technology;SMSU 表示 Samsung Electronics Co., Ltd.;MICT 表示 Microsoft Corp.;EBAY 表示 Ebay Inc.;INEI 表示 Beijing Tianyuan Innovation Technology; AMAZ 表示 Amazon Technologies Inc.;PURS 表示 Pure Storage Inc.;BOAI 表示 Bonsai Ai Inc.;DRTC 表示 Dalian Roiland Technology Co., Ltd.。
《图 2.2.3》
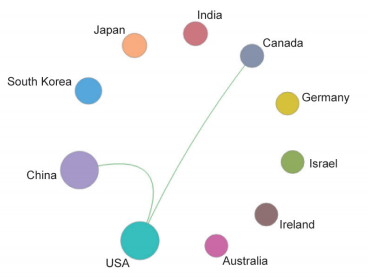
图 2.2.3 “基于深度学习的人机智能交互系统”工程开发前沿主要产出国家 / 地区间的合作网络
《图 2.2.4》
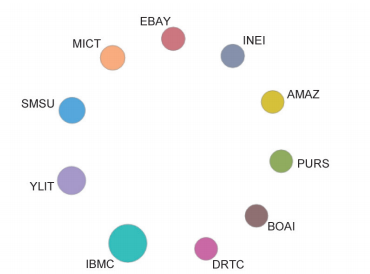
图 2.2.4 “基于深度学习的人机智能交互系统”工程开发前沿主要产出机构间的合作网络
功能呈现的核心,制造中需要进行单细胞和基因的微纳尺度的生命单元的堆积,需要研究其堆积的原理以及相互间的作用关系,通过调节细胞之间的关系,为生长和功能再生提供三维结构和时变功能调控能力。3D 打印的最大难点是生命体的应用,保证生命体的活性是基本保障,因此,生命体的制造需要与其适应的培养环境,包括培养液的更新、氧气与二氧化碳等气氛环境的调控,形成生物环境与打印工艺的复合。
(3) 功能形成机理与构件功能形成
3D 打印的初始结构与功能需要在特定环境下发展形成最终功能,这其中需要对功能的形成与设计制造的关系进行认识和发展。为形成这些功能, 需要认识功能与多细胞体系随时间发展而变化的规律,包括细胞互联和相互作用的关系,通过细胞之间的作用,形成的能量(肌细胞)释放或者信息(神经元)传递功能,为利用这些功能向具有多功能的器件发展提供基础。
(4) 多功能器件或组织的制造与功能评价
基于以上设计、制造和原理的认识,以特定的器官或生物器件为目标,进行系统的结构设计与功能生长设计,认识在生命体单元的发展中,需要研究调控 3D 打印的细胞或基因组合,控制打印过程中的工艺对生命体的损伤,调控形成的器官或器件所具有的功能以及在细胞生长中所进行的干预和导向。需要认识 3D 打印与功能形成的关系,对功能的评价和测定,形成生命体单元 – 功能设计 – 无损伤打印 – 功能生成的研究体系,为制备具有生命体的器官和器件提供技术。
(5) 类脑的设计与制造
人工智能的深度学习是按照模型猜想、数据训练及不断的学习积累,甚至采用了生物遗传算法来实现其功能的,恰如飞机实现了鸟类的飞翔。将来,类脑是采用 3D 打印方法把生物芯片植入再造的器官或者人造脑中,或者学习人脑神经元的随机互联来制造功能强大的生物芯片,或者采用基因手段来完全仿制一个具有生物活性的大脑, 实现人造大脑与人体原器官及若干人造器官的信息收集、决策控制与驱动等都是有待研究和创新的领域。
“基于 3D 打印的生物组织再生技术”工程开发前沿中核心专利公开量排在前三位的国家 / 地区分别为中国(143)、美国(28)和韩国(6), 篇均被引频次排在前三位的国家 / 地区分别为瑞典(21.5)、美国(3.11)和日本(1.25),见表 2.2.5。在公开量 Top 10 国家 / 地区中,美国和瑞典,英国和意大利之间存在合作,见图 2.2.5。核心专利公开量排在前三位的机构分别为 UYXJ(6)、UYQI(5) 和 UYJI(4),见表 2.2.6。从目前样本数据看,专利主要产出机构之间基本不存在合作,见图 2.2.6。我国公开的与“基于 3D 打印的生物组织再生技术”工程开发前沿相关的核心专利有 143 项, 公开较多的大陆机构为 XPCB 和 USWH。
《表 2.2.5》
表 2.2.5 “基于 3D 打印的生物组织再生技术”工程开发前沿中核心专利的主要产出国家/ 地区
| 序号 | 国家 / 地区 | 公开量 | 公开量比例 | 被引数 | 被引数比例 | 平均被引数 |
| 1 | China | 143 | 73.33% | 177 | 48.76% | 1.24 |
| 2 | USA | 28 | 14.36% | 87 | 23.97% | 3.11 |
| 3 | South Korea | 6 | 3.08% | 0 | 0.00% | 0 |
| 4 | Japan | 4 | 2.05% | 5 | 1.38% | 1.25 |
| 5 | Taiwan of China | 3 | 1.54% | 3 | 0.83% | 1 |
| 6 | Sweden | 2 | 1.03% | 43 | 11.85% | 21.5 |
| 7 | Germany | 2 | 1.03% | 3 | 0.83% | 1.5 |
| 8 | Italy | 2 | 1.03% | 1 | 0.28% | 0.5 |
| 9 | UK | 2 | 1.03% | 0 | 0.00% | 0 |
| 10 | India | 2 | 1.03% | 0 | 0.00% | 0 |
《表 2.2.6》
表 2.2.6 “基于 3D 打印的生物组织再生技术”工程开发前沿中核心专利的主要产出机构
| 序号 | 机构 | 公开量 | 公开量比例 | 被引数 | 被引数比例 | 平均被引数 |
| 1 | UYXJ | 6 | 3.08% | 11 | 3.03% | 1.83 |
| 2 | UYQI | 5 | 2.56% | 3 | 0.83% | 0.6 |
| 3 | UYJI | 4 | 2.05% | 40 | 11.02% | 10 |
| 4 | EBAY | 4 | 2.05% | 26 | 7.16% | 6.5 |
| 5 | CAAT | 4 | 2.05% | 6 | 1.65% | 1.5 |
| 6 | UYZH | 4 | 2.05% | 6 | 1.65% | 1.5 |
| 7 | XPCB | 4 | 2.05% | 5 | 1.38% | 1.25 |
| 8 | USWH | 4 | 2.05% | 4 | 1.10% | 1 |
| 9 | UYPO | 4 | 2.05% | 0 | 0.00% | 0 |
| 10 | UYBC | 3 | 1.54% | 6 | 1.65% | 2 |
注:UYXJ 表示 Xi’an Jiaotong Univ;UYQI 表示 Tsinghua Univ;UYJI 表示 Jilin Univ;EBAY 表示 Ebay Inc;CAAT 表示Shenzhen Inst Advanced Technology;UYZH 表 示 Zhejiang Univ;XPCB 表 示 Xi’an Particle Cloud Biotechnology Co., Ltd.; USWH 表示 Sichuan Univ West China Hospital;UYPO 表示 Postech Acad-Ind Found;UYBC 表示 Beijing Chem Technology Univ。
《图 2.2.5》
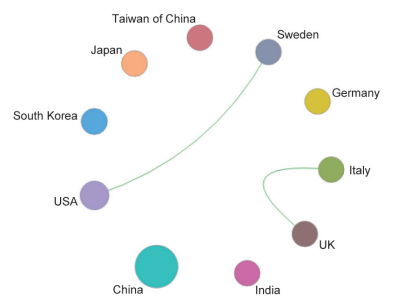
图 2.2.5 “基于 3D 打印的生物组织再生技术”工程开发前沿主要产出国家 / 地区间的合作网络
《图 2.2.6》
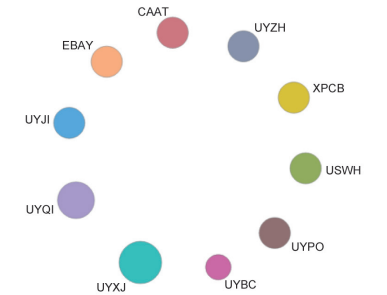
图 2.2.6 “基于 3D 打印的生物组织再生技术”工程开发前沿主要产出机构间的合作网络
领域课题组人员
课题组组长:段正澄 郭东明
课题组成员:
陈懋章 范本尧 樊会涛 顾国彪 关 杰
顾诵芬 黄先祥 金东寒 李 骏 李 明
刘友梅 钱清泉 邱志明 孙逢春 谭建荣
唐任远 王 浚 王振国 杨华勇 曾广商
张立同 赵 煦 史铁林 姬 学 李淼鑫
执笔组成员:
沈卫明 史彦军 曹元成 苑伟政 何 洋
李仁府 高 亮 李涤尘 夏 奇 夏 凉
陈修国 詹小斌 陈惜曦 龚 渤 谭先华
李俊杰 龚 渤 王 勐 刘智勇 孙 博
谷洪刚 石雅婷











 京公网安备 11010502051620号
京公网安备 11010502051620号




