
《1 工程研究前沿》
1 工程研究前沿
《1.1 Top 10 工程研究前沿发展态势》
1.1 Top 10 工程研究前沿发展态势
机械与运载工程领域 Top 10 工程研究前沿涉及机械工程、船舶与海洋工程、航空宇航科学技术、兵器科学与技术、动力及电气设备工程与技术、交通运输工程等学科方向(表 1.1.1)。其中,属于传统研究深化的有人 – 机器人非接触式协作、水下导航定位技术、协同式无人驾驶与运行优化技术、高速列车湍流流场的主动 / 被动控制技术、机器人变刚度控制技术和小微型无人机探测;新兴前沿包括飞行器船舶甲板自主着陆技术、摩擦纳米发电技术、连续多维变构型飞行控制理论与方法和微型机器人主动给药技术。2016—2021 年,各前沿相关的核心论文发表情况见表 1.1.2。
(1)飞行器船舶甲板自主着陆技术
飞行器船舶甲板自主着陆是指在飞行器降落阶段,将机载设备得到的信息通过处理,获得精度足够高的降落信息,使飞行器自行完成着陆的过程,涉及船舶与海洋工程、飞行器设计、卫星导航、雷达跟踪、计算机视觉、人工智能等多学科的交叉融合。飞行器船舶甲板着陆技术经历了全人工模式、人工辅助半自动模式、全自动模式以及无人飞行器全自主模式四个阶段。相关研究主要分为两个方面:一是自主着陆引导技术研究, 主要用于确定机舰相对位置、生成基准下滑轨迹、计算或测量轨迹跟踪误差等;二是自主着陆控制技术研究,探究具有鲁棒性的着陆控制策略及方法, 在复杂环境下实现快速跟踪理想下滑轨迹,并能保持飞行器姿态的稳定性。到目前为止,飞行器船舶甲板着陆技术的研究已经向多信息、全方位、自主化方向发展,同时随着卫星导航、精密雷达、视觉导航、人工智能以及先进控制等相关技术的不断发展,飞行器甲板着陆的可靠性将越来越高, 最终实现自动化、智能化着陆。
《表 1.1.1》
表 1.1.1 机械与运载工程领域 Top 10 工程研究前沿
| 序号 | 工程研究前沿 | 核心论文数 | 被引频次 | 篇均被引频次 | 平均出版年 |
| 1 | 飞行器船舶甲板自主着陆技术 | 8 | 191 | 23.88 | 2018 |
| 2 | 人 – 机器人非接触式协作 | 3 | 161 | 53.67 | 2019.7 |
| 3 | 摩擦纳米发电技术 | 21 | 1 157 | 55.1 | 2019.5 |
| 4 | 水下导航定位技术 | 85 | 2 836 | 33.36 | 2017.6 |
| 5 | 协同式无人驾驶与运行优化技术 | 10 | 226 | 22.6 | 2018 |
| 6 | 连续多维变构型飞行控制理论与方法 | 15 | 232 | 15.47 | 2017.7 |
| 7 | 微型机器人主动给药技术 | 41 | 2 564 | 62.54 | 2019 |
| 8 | 高速列车湍流流场的主动 / 被动控制技术 | 20 | 866 | 43.3 | 2017.7 |
| 9 | 机器人变刚度控制技术 | 6 | 344 | 57.33 | 2017.2 |
| 10 | 小微型无人机探测 | 6 | 175 | 29.17 | 2017 |
《表 1.1.2》
表 1.1.2 机械与运载工程领域 Top 10 工程研究前沿逐年核心论文发表数
| 序号 | 工程研究前沿 | 2016 | 2017 | 2018 | 2019 | 2020 | 2021 |
| 1 | 飞行器船舶甲板自主着陆技术 | 1 | 2 | 2 | 2 | 1 | 0 |
| 2 | 人 – 机器人非接触式协作 | 0 | 0 | 1 | 0 | 1 | 1 |
| 3 | 摩擦纳米发电技术 | 0 | 0 | 5 | 6 | 4 | 6 |
| 4 | 水下导航定位技术 | 26 | 16 | 20 | 13 | 9 | 1 |
| 5 | 协同式无人驾驶与运行优化技术 | 2 | 3 | 2 | 0 | 2 | 1 |
| 6 | 连续多维变构型飞行控制理论与方法 | 4 | 2 | 3 | 6 | 0 | 0 |
| 7 | 微型机器人主动给药技术 | 1 | 5 | 10 | 9 | 9 | 7 |
| 8 | 高速列车湍流流场的主动 / 被动控制技术 | 3 | 6 | 7 | 3 | 1 | 0 |
| 9 | 机器人变刚度控制技术 | 1 | 3 | 2 | 0 | 0 | 0 |
| 10 | 小微型无人机探测 | 2 | 3 | 0 | 1 | 0 | 0 |
(2) 人 – 机器人非接触式协作
人– 机器人非接触式协作是指在同一物理空间中机器人与人保持足够的安全距离,同时辅助人类完成特定作业任务、降低人类劳动负担。它凸显了协作机器人的安全性、适应性和舒适性,即在人机协作过程中,机器人不伤害人,机器人能够准确理解人的需求并主动适应人的运动,机器人的动作符合人的认知习惯,让人理解机器人的动作意图。主要的研究方向包括:① 预防碰撞事件的传感技术与机器人设计方法,探究感知物体距离、接触力、关节力矩等多模态信息的新型传感技术,研究刚 – 柔– 软耦合的机器人运动规律与变形机理,研发自主回避碰撞的协作机器人;② 基于机器视觉的人体运动意图的预测方法,研究非结构化环境中的物体识别算法,建立顺应人体操作意图、手眼协调的自适应控制算法,建立人机交互的混合现实界面;③ 分析人体肢体多自由度运动的生物力学特征,揭示人体肢体自然运动规律,建立机器人拟人运动的仿生设计理论与机械生成方法,建立符合人类认知习惯的机器人运动轨迹规划方法与反馈控制技术。随着软材料科学、智能感知技术、人因工程等学科的发展, 协作机器人可望在多模态感知、意图识别、环境建模、拟人运动、决策优化等关键技术取得突破,强化人– 机器人非接触式协作的交互体验与作业效能。
(3) 摩擦纳米发电技术
摩擦纳米发电技术是指两种不同材料在机械力的作用下接触和分离时产生正负静电荷,相应地在材料的上下电极上产生感应电势差,从而驱动电子通过外电路在两个电极之间流动,进而将机械能转变为电能的技术。摩擦纳米发电技术经历了发电原理与工作模式探索、复合式发电拓展与电路集成和自驱动智能微系统三个阶段。相关研究主要分为三个方面:一是对摩擦纳米发电机的机理、材料、结构与性能提升的研究,探究摩擦起电的原理、发电机的工作模式,进而开发高性能的发电机;二是摩擦与压电等多机理融合的复合式发电机拓展并与电源管理电路进行集成,重点研究如何高效采集环境中的多元能量并进行有效转化存储和应用的技术; 三是将发电机与传感等功能进行一体化集成,实现能够长期稳定工作的“功能 + 供能”自驱动智能微系统。摩擦纳米发电技术以其高效采集环境能量、主动式高灵敏传感、易于微小型系统集成等优势, 为低功耗可穿戴智能电子器件和微系统的创新发展提供了具有吸引力的技术方案,代表了微系统的发展趋势,在微纳能源、主动传感、自驱动系统等领域具有广泛的应用前景。
(4) 水下导航定位技术
水下导航定位技术是解决各类水下潜航器在特定坐标系下的位置、姿态、速度等运动状态信息主被动测量问题的一类技术的总称。惯性导航、水声导航、海洋地球物理特性导航是传统水下导航的基本方法。随着导航定位性能要求的不断提升,单一的导航模式已不能满足精度要求。以惯性导航为主, 地球物理匹配导航和水声导航等为辅的组合导航系统已成为水下高精度、长航时导航定位技术发展的重要特点。惯性导航装置、海洋地磁场与重力场传感器、水下声波、海床地图、海洋水文环境、全球定位系统、水面浮标、水下信标等多源信息的高精度感知、时间同步、特征融合与匹配、位置推算处理等问题是当前该领域主要的研究热点。天文导航、多潜航器集群协同导航等新型水下自主高精度、高可靠导航方法也越来越受到关注。
(5) 协同式无人驾驶与运行优化技术
由于道路和水路运输系统的复杂性与多样性, 其无人化研发应用相较于航空、铁路运输方式起步较晚,但近年来以上两种运输方式运载工具的无人化、少人化以及单体智能技术取得了长足进步,道路交通中港口、物流园区、露天矿山等特定区域的无人驾驶已有规模化应用。水路交通的岛际间航行、渡轮和封闭水域的船舶智能航行也有应用案例。但在道路交通的干线运输和城市交通运输的车辆无人化,水路交通的远距离内河航道、远海和远洋船舶的智能航行仍存在技术瓶颈,突破道路和水路交通运输协同式无人驾驶与运行优化技术关键理论及方法,可以大幅提升无人驾驶可靠性和实现交通系统的高效运行。车辆无人驾驶和运行优化主要集中在群体智能决策控制方面,主要研究方向包括:车辆群体多维立体感知技术;运载过程车辆状态、道路条件、交通环境等各因素对车辆动力学的作用机理; 特定区域下时间、空间和任务等高约束影响下的车辆群体决策优化方法,以及时变拓扑结构下异构车辆群体智能控制方法。船舶智能航行与运行优化主要集中在船舶协同远程控制技术方面,主要研究方向包括:复杂海况环境扰动下的船舶多体动力学建模、单船环境态势感知与自主航行、多船协同运动控制理论与方法、多船编队布局与路径规划方法等。未来发展重点强调单体动力学向群体动力学、个体感知向协同感知以及自主决策向交互决策转变,体现单个动作规划向群体系统优化的技术跃迁。
(6) 连续多维变构型飞行控制理论与方法
连续多维变构型飞行器作为一种新兴前沿武器装备,已成为世界各主要军事强国重点发展的方向之一。该类飞行器能够大尺度改变气动构型,实现大飞行包线内的多任务飞行,在未来战场必将发挥颠覆性作用,对维护我国国家安全和发展利益具有重大意义。连续多维变构型飞行控制的主要研究方向包括:连续变形引起的飞行器模型不确定性和非线性分析方法;强不确定环境下飞行动力学耦合控制机理;刚 – 柔 – 液耦合的动力学特性与控制系统建模理论;大攻角敏捷机动下的平滑切换控制理论; 变构型与飞行器的一体化智能控制方法;跨域无缝自主导航及环境 – 任务自匹配的在线自主规划决策等。未来连续多维变构型飞行器控制,将在以下方向实现突破:基于自适应强化学习方法的飞行器变形控制;分布式变形结构的网络通信特性和分布式驱动器之间的协调控制问题;时变特性、非线性和不确定性大尺度变体飞行器的飞行控制理论;通信受约束的大数目的驱动器的协调控制;共享信道的大规模分布式系统的协调控制;连续多维大变构下适应力学与控制弱模型、多物理场强耦合、任务与环境等强不确定条件的智能决策、自主控制与轨迹规划方法。
(7) 微型机器人主动给药技术
微型机器人由于其具有体积小、可自主运动与可精确操控等特点,在主动给药和精准治疗等生物医学领域具有很好的发展前景。与传统药物粒子被动依赖于人体循环系统相比,微型机器人主动给药技术可以通过自我驱动或外部环境驱动,让微型机器人精确到达预定组织,从而实现精准给药的目标。目前,主要的驱动方式有化学/ 生化驱动、外场驱动和生物驱动等。这一技术的关键在于根据病理情况,有针对性地设计微型机器人的载药、驱动与释药方式,实现药物的精确送达,提高药物的效率, 并减少药物副作用。未来,微型机器人主动给药技术在生物/ 人体安全性,驱动及导航等方面仍然存在诸多挑战。
(8) 高速列车湍流流场的主动 / 被动控制技术
随着高铁列车速度的不断提高,列车所受到的气动阻力急剧增高,并在总阻力中所占的比重越来越大;与此同时,气动噪声将超过牵引噪声与轮轨噪声成为最主要的噪声源。上述现象会导致巨大的能源消耗和噪声污染问题。列车在高速运行时受到的气动阻力和产生的噪声均与列车周围的湍流流场密切相关。因此,为了保证列车安全运行并达到“节能、环保、舒适”的要求,对列车周围的湍流流场实施主、被动控制成为一个日益突出并亟待解决的问题。而近年来不断发展的主、被动流动控制技术和理论为高速列车湍流流场的控制提供了可能,并已成为领域研究热点。高速列车湍流流场的控制研究旨在通过控制大尺度湍流涡结构或近壁湍流特征, 实现减阻的目标,具体的研究方向包括:基于列车气动外形优化的减阻降噪研究;基于仿生结构扰流装置的高速列车气动减阻研究;基于表面球窝结构的被动减阻研究;基于尾部射流的列车减阻研究; 基于新型等离子体激励器的高速列车壁面湍流减阻研究等。未来的发展趋势和研究方向包括开发能够适应列车严苛运行环境的高可靠性、高鲁棒性主动流动控制新技术,突破目前控制技术的瓶颈,以及发展基于机器学习的闭环式湍流流动控制方案和理论。
(9) 机器人变刚度控制技术
机器人的刚度刻画了其与外部环境接触交互的行为特性。机器人变刚度技术将顺应机器人的优势与传统刚性机器人的性能相融合,不仅是机器人领域诸多分支的一项使能技术,而且也是机器人“具身智能”的重要体现。随着机器人从空间隔离的自动生产线走进人类工作生活环境,蓬勃兴起的人机协作共融、医疗康复助力、多指精细作业、足式仿生移动、软体机器人等应用依据交互过程的动态事件主动、实时地改变刚度,可以更好地达到任务鲁棒性、协作安全性、动作柔顺性、操作灵巧性、运动高能效的目标。传统变刚度技术通常采用被动变刚度方式,依靠在机器人的刚性结构上串联 / 并联弹性部件,离线调整弹性元件形态、尺寸的方式来改变机器人的支链刚度,往往导致结构尺寸大、整体质量重、刚度变比小、动态响应慢、“软”“硬” 难以兼顾,无法满足新兴应用领域大刚度变比、高带宽、快速响应的要求。融合机器人的材料、结构和控制,实现“结构 – 驱动 – 传动 – 感知 – 控制” 一体化,达成机器人主动变刚度是机器人技术发展的必然趋势,已成为机器人领域的热点。机器人变刚度控制技术的主要研究方向包括:智能材料 – 智能结构一体设计和控制,实现大变形运动和大刚度变比的统一,达到软体结构的“软”“硬”兼施; 突破高功率密度( 准) 直驱技术,实现“驱动– 传动– 感知 – 控制”一体化,降低结构惯量,提高变刚度控制的快速性;突破机器人全身优化控制方法,降低高维复杂变刚度控制的复杂性,提高变刚度实时性和精准性;针对人– 机器人– 环境交互应用场景, 采用机器学习方法,构建应用场景下的刚度规划库, 提高应用场景引导的变刚度智能决策水平。
(10) 小微型无人机探测
近年来,由于携带便利、操控简单、获取渠道多,小微型无人机已经出现滥用状况,无人机被用于非法肇事的可能性大幅增加,成为日益突出的安全威胁。然而,由于小微型无人机具有飞行高度低、速度慢、体积小等特点(“低慢小”目标),导致小微型无人机探测面临诸多挑战。目前探测手段主要有雷达探测、无线电探测、声波探测和光电探测等。雷达探测必须在低空复杂的背景和杂波的干扰下完成目标检测,目前相关研究集中于杂波和干扰抑制技术、回波信号的精细化信号处理技术等方面。无线电探测设备只能被动侦测空中目标的无线电信号。声学探测方面, 由于无人机为电动机式驱动方式,其扰动小、噪声低、速度慢,以致很难被探测到。光电探测设备可以利用不同波段实现目标无人机图像的采集,具有广泛的应用前景。但是,可见光相机的探测距离相对有限,且与探测视野、探测细节不可兼得。红外探测分辨率有限,当距离较远时,很难将无人机像素与噪声点区别开来,基于人工智能的图像信息处理技术逐渐受到高度关注。为了满足实际复杂环境下的无人机探测需求, 借助多源信息融合技术集成两种及以上传感器进行联合探测成为未来发展趋势。
《1.2 Top 3 工程研究前沿重点解读》
1.2 Top 3 工程研究前沿重点解读
1.2.1 飞行器船舶甲板自主着陆技术
飞行器船舶甲板着陆技术是衡量舰载飞行器安全飞行的重要指标。根据相关数据统计,在起飞和降落阶段,人为因素所导致的航空事故甚至高达50%。因此,为飞行器提供自动化程度高、导航定位精度可靠的系统性引导降落方案将有助于进一步推广其应用场景,降低人员操作负担,所以研究飞行器甲板着陆技术具有极其重要的现实意义。与固定平台上降落相比较,在移动的船舶上成功降落需要克服更多的挑战,主要是着陆区域狭窄,并且在降落过程中会同时进行平移和旋转运动。此外,着陆阶段不可避免地会面临大气湍流、甲板风、舰船尾流等严重的外部扰动,当天气和海况条件恶劣时, 这些情况将会更加复杂。
随着科学技术的发展与应用,飞行器自主控制成为当前航空宇航科学与技术、控制科学与工程、信息与通信工程等学科领域的研究热点。为此,飞行器船舶甲板自主着陆是舰载机自主着陆和飞行器自主控制等相关技术的重要发展趋势。飞行器船舶甲板着陆技术经历了全人工模式、人工辅助半自动模式、全自动模式和无人飞行器全自主模式四个阶段。由于着陆环境十分复杂,精确的制导与控制技术成为舰载飞行器安全着陆的重中之重。我国关于飞行器船舶甲板自主着陆技术的研究起步较晚,但近年发展迅速。相关研究主要分为两个方面:一是自主着陆引导方面,探究多模态信息融合着陆引导技术,设计高可靠性的无线数据链路,发展高效率的实时图像处理技术,实现高精准度的自主导航定位;二是自主着陆控制方面,开发具有强鲁棒性的飞行控制技术,利用人工智能方法提高舰船甲板运动状态的估计精度,抑制舰船尾流、甲板运动、空中阵风等因素干扰,研究多系统集成的自主着陆控制技术,在复杂环境下实现快速跟踪理想下滑轨迹, 并能保持飞行器姿态的稳定性。飞行器船舶甲板着陆技术离不开控制工程、传感器、计算机、人工智能等信息技术的发展,在导航、制导与控制、仪器科学、飞行器设计等学科领域具有重要理论研究价值,对我国实现强大海军力量、迈向海洋强国具有重要实际意义。
“飞行器船舶甲板自主着陆技术”工程研究前沿中,核心论文发表量靠前的国家是中国和新加坡,篇均被引频次靠前的国家是澳大利亚、加拿大和突尼斯(表 1.2.1)。在发文量前六的国家中, 中国与新加坡合作较多,加拿大与突尼斯合作较多(图 1.2.1)。核心论文发文机构方面,南洋理工大学、北京航空航天大学和南京航空航天大学具有优势,篇均被引频次排在前列的机构是新南威尔士大学、迦太基学院、斯法克斯大学和魁北克大学(表 1.2.2)。在发文量前十的机构中,迦太基学院、斯法克斯大学、魁北克大学合作较多, 而南洋理工大学、新加坡国立大学、新加坡国防科技研究院合作较多(其中南洋理工大学与北京航空航天大学存在合作)(图 1.2.2)。施引核心论文的主要产出国家是中国(表 1.2.3),施引核心论文的主要产出机构是北京航空航天大学和南京航空航天大学(表 1.2.4)。图 1.2.3 为“飞行器船舶甲板自主着陆技术”工程研究前沿的发展路线。
《表 1.2.1》
表 1.2.1 “飞行器船舶甲板自主着陆技术”工程研究前沿中核心论文的主要产出国家
| 序号 | 国家 | 核心论文数 | 论文比例 /% | 被引频次 | 篇均被引频次 | 平均出版年 |
| 1 | 中国 | 4 | 50 | 84 | 21 | 2018.5 |
| 2 | 新加坡 | 2 | 25 | 46 | 23 | 2017.5 |
| 3 | 澳大利亚 | 1 | 12.5 | 42 | 42 | 2017 |
| 4 | 加拿大 | 1 | 12.5 | 33 | 33 | 2017 |
| 5 | 突尼斯 | 1 | 12.5 | 33 | 33 | 2017 |
| 6 | 韩国 | 1 | 12.5 | 13 | 13 | 2020 |
《图 1.2.1》
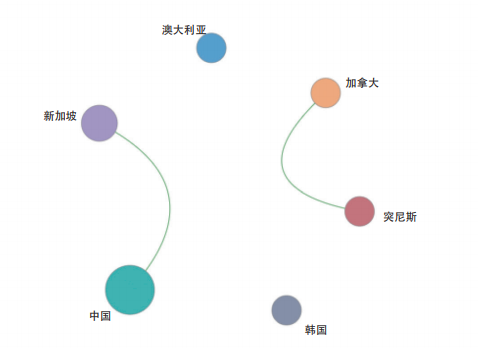
图 1.2.1 “飞行器船舶甲板自主着陆技术”工程研究前沿主要国家间的合作网络
《表 1.2.2》
表 1.2.2 “飞行器船舶甲板自主着陆技术”工程研究前沿中核心论文的主要产出机构
| 序号 | 机构 | 核心论文数 | 论文比例 /% | 被引频次 | 篇均被引频次 | 平均出版年 |
| 1 | 南洋理工大学 | 2 | 25 | 46 | 23 | 2017.5 |
| 2 | 北京航空航天大学 | 2 | 25 | 44 | 22 | 2019 |
| 3 | 南京航空航天大学 | 2 | 25 | 40 | 20 | 2018 |
| 4 | 新南威尔士大学 | 1 | 12.5 | 42 | 42 | 2017 |
| 5 | 迦太基学院 | 1 | 12.5 | 33 | 33 | 2017 |
| 6 | 斯法克斯大学 | 1 | 12.5 | 33 | 33 | 2017 |
| 7 | 魁北克大学 | 1 | 12.5 | 33 | 33 | 2017 |
| 8 | 新加坡国防科技研究院 | 1 | 12.5 | 19 | 19 | 2016 |
| 9 | 新加坡国立大学 | 1 | 12.5 | 19 | 19 | 2016 |
| 10 | 蔚山国立科学技术研究所 | 1 | 12.5 | 13 | 13 | 2020 |
《图 1.2.2》
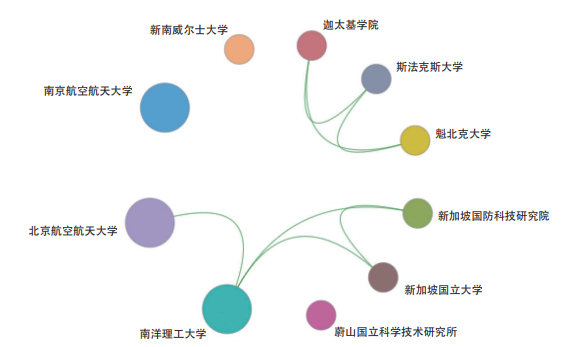
图 1.2.2 “飞行器船舶甲板自主着陆技术”工程研究前沿主要机构间的合作网络
《表 1.2.3》
表 1.2.3 “飞行器船舶甲板自主着陆技术”工程研究前沿中施引核心论文的主要产出国家
| 序号 | 国家 | 施引核心论文数 | 施引核心论文比例 /% | 平均施引年 |
| 1 | 中国 | 105 | 63.64 | 2020 |
| 2 | 美国 | 13 | 7.88 | 2019.1 |
| 3 | 韩国 | 12 | 7.27 | 2019.6 |
| 4 | 意大利 | 7 | 4.24 | 2019.4 |
| 5 | 新加坡 | 6 | 3.64 | 2020 |
| 6 | 英国 | 5 | 3.03 | 2019.6 |
| 7 | 加拿大 | 5 | 3.03 | 2020.2 |
| 8 | 澳大利亚 | 4 | 2.42 | 2020.2 |
| 9 | 罗马尼亚 | 3 | 1.82 | 2020.3 |
| 10 | 印度 | 3 | 1.82 | 2020.7 |
《表 1.2.4》
表 1.2.4“飞行器船舶甲板自主着陆技术”工程研究前沿中施引核心论文的主要产出机构
| 序号 | 机构 | 施引核心论文数 | 施引核心论文比例 /% | 平均施引年 |
| 1 | 北京航空航天大学 | 18 | 21.95 | 2019.9 |
| 2 | 南京航空航天大学 | 15 | 18.29 | 2020.3 |
| 3 | 北京理工大学 | 9 | 10.98 | 2019.7 |
| 4 | 同济大学 | 7 | 8.54 | 2019.7 |
| 5 | 哈尔滨工程大学 | 7 | 8.54 | 2020 |
| 6 | 北京科技大学 | 6 | 7.32 | 2019.7 |
| 7 | 南洋理工大学 | 5 | 6.1 | 2020 |
| 8 | 西北工业大学 | 4 | 4.88 | 2020 |
| 9 | 湖北经济学院 | 4 | 4.88 | 2020.2 |
| 10 | 重庆大学 | 4 | 4.88 | 2020.2 |
《图 1.2.3》
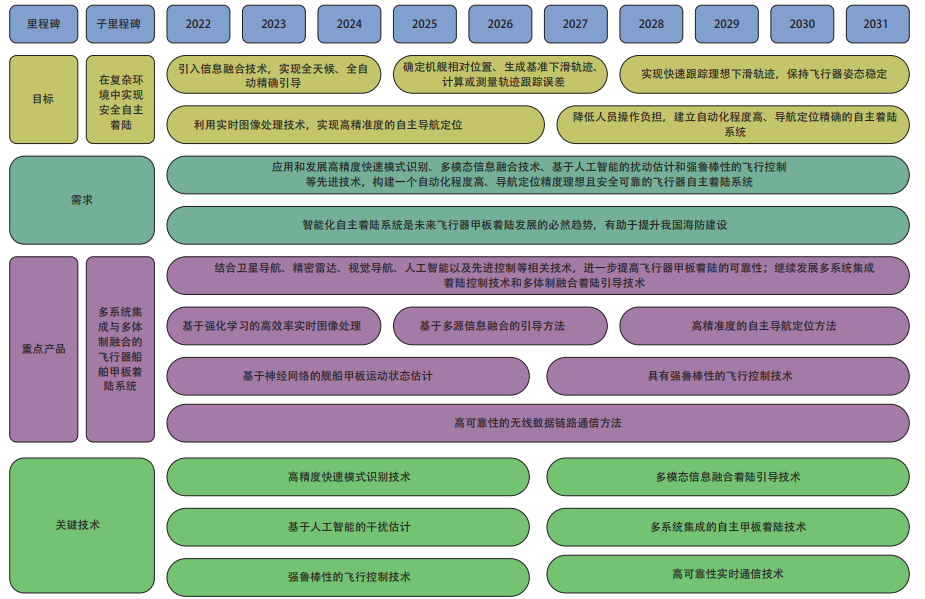
图 1.2.3 “飞行器船舶甲板自主着陆技术”工程研究前沿的发展路线
1.2.2 人– 机器人非接触式协作
随着绿色制造、智能制造、个性化定制等先进制造需求的日益强烈,机器人将人类专家的智慧与经验物化在制造活动中,使得制造系统能进行自主感知、推理、学习、决策等智能活动,并在制造中通过与人合作共事分担人类体力劳动,扩大、延伸和部分地取代专家的脑力劳动,提高制造系统的灵活性、适应性和自治性。人与机器人的密切协作正向人机共融方向发展,与人共融是新一代机器人系统的本质特征。传统工业机器人由于刚性高、响应快、力矩大等特点,只能在与人隔离的物理环境中工作以确保人员安全。协作机器人由于具有体积紧凑、灵活度高、主从示教等优点,已作为智能制造过程中的重要组成部分被广泛应用于电子加工、零件打磨、油漆喷涂、货物分拣或部件装配等场景中。自 1995 年通用汽车试图研制与工人协同工作的机器人起,相继出现了优傲机器人公司(Universal Robots)的 UR5、库卡机器人有限公司(KUKA) 的 LBR iiwa、ABB 公司的 YuMi、发那科公司(FANUC)的 CR-35iA 等协作机器人,2016 年国际标准化组织针对协作机器人发布了最新的工业标准 ISO/TS 15066。
人机共融的应用场景要求协作机器人具有安全性、适应性和舒适性,即通过人 – 机器人非接触式协作来防止人员伤害,机器人能够准确理解人的需求并主动适应人的运动,机器人的动作符合人的认知习惯,让人理解机器人的动作意图。主要的研究方向包括:① 预防碰撞事件的传感技术与机器人设计方法,探究感知物体距离、接触力、关节力矩等多模态信息的新型传感技术,研究刚 – 柔 – 软耦合的机器人运动规律与变形机理,研发自主回避碰撞的协作机器人;② 基于机器视觉的人体运动意图的预测方法,研究非结构化环境中的物体识别算法,建立顺应人体操作意图、手眼协调的自适应控制算法,建立人机交互的混合现实界面;③ 分析人类肢体多自由度运动的生物力学特征,揭示人类肢体自然运动规律,建立机器人拟人运动的仿生设计理论与机械生成方法,建立符合人类认知习惯的机器人运动轨迹规划方法与反馈控制技术。随着软材料科学、智能感知技术、人因工程等学科的发展, 有望在多模态感知、意图识别、环境建模、拟人运动、决策优化等关键技术上取得突破,强化人– 机器人非接触式协作的交互体验与作业效能。
“人– 机器人非接触式协作”工程研究前沿中, 核心论文的主要产出国家是意大利(表 1.2.5); 核心论文的主要产出机构为莫德纳和勒佐艾米利亚大学与罗马大学(表 1.2.6),这两所机构有较多合作(图 1.2.4)。施引核心论文发文量排在前三位的国家是意大利、中国和美国(表 1.2.7)。施引核心论文的主要产出机构是莫德纳和勒佐艾米利亚大学、中国科学院和武汉理工大学(表 1.2.8)。图 1.2.5 为“人 – 机器人非接触式协作”工程研究前沿的发展路线。
《表 1.2.5》
表 1.2.5“人- 机器人非接触式协作”工程研究前沿中核心论文的主要产出国家
| 序号 | 国家 核心论文数 论文比例 /% 被引频次 | 篇均被引频次 | 平均出版年 |
| 1 | 意大利 3 100.00 161 | 53.67 | 2019.7 |
《表 1.2.6》
表 1.2.6“人- 机器人非接触式协作”工程研究前沿中核心论文的主要产出机构
| 序号 | 机构 核心论文数 论文比例 /% 被引频次 | 篇均被引频次 | 平均出版年 |
| 1 | 莫德纳和勒佐艾米利亚大学 2 66.67 158 | 79 | 2019 |
| 2 | 罗马大学 2 66.67 22 | 11 | 2020.5 |
《图 1.2.4》

图 1.2.4 “人– 机器人非接触式协作”工程研究前沿主要机构间的合作网络
《表 1.2.7》
表 1.2.7 “人- 机器人非接触式协作”工程研究前沿中施引核心论文的主要产出国家
| 序号 | 国家 | 施引核心论文数 | 施引核心论文比例 /% | 平均施引年 |
| 1 | 意大利 | 47 | 23.74 | 2020.5 |
| 2 | 中国 | 43 | 21.72 | 2020.3 |
| 3 | 美国 | 23 | 11.62 | 2020.6 |
| 4 | 英国 | 18 | 9.09 | 2020.7 |
| 5 | 德国 | 14 | 7.07 | 2020.3 |
| 6 | 瑞典 | 13 | 6.57 | 2020.2 |
| 7 | 西班牙 | 9 | 4.55 | 2020.2 |
| 8 | 法国 | 8 | 4.04 | 2020.2 |
| 9 | 芬兰 | 8 | 4.04 | 2020.5 |
| 10 | 葡萄牙 | 8 | 4.04 | 2020.8 |
《表 1.2.8》
表 1.2.8 “人- 机器人非接触式协作”工程研究前沿中施引核心论文的主要产出机构
| 序号 | 机构 | 施引核心论文数 | 施引核心论文比例 /% | 平均施引年 |
| 1 | 莫德纳和勒佐艾米利亚大学 | 11 | 17.19 | 2020.5 |
| 2 | 中国科学院 | 9 | 14.06 | 2020.2 |
| 3 | 武汉理工大学 | 7 | 10.94 | 2020.4 |
| 4 | 都灵理工大学 | 5 | 7.81 | 2020.4 |
| 5 | 意大利技术研究院 | 5 | 7.81 | 2020.4 |
| 6 | 意大利国家研究委员会 | 5 | 7.81 | 2020.8 |
| 7 | 梅拉达伦大学 | 5 | 7.81 | 2020 |
| 8 | 米尼奥大学 | 5 | 7.81 | 2020.8 |
| 9 | 米兰理工大学 | 4 | 6.25 | 2020.2 |
| 10 | 伯明翰大学 | 4 | 6.25 | 2020 |
《图 1.2.5》

图 1.2.5 “人– 机器人非接触式协作”工程研究前沿的发展路线
1.2.3 摩擦纳米发电技术
进入 21 世纪,随着电子产品的推广和普及, 便携式电子设备激增,随之而来的能源供给和存储问题也愈发突出。虽然器件本身能耗低,但是整体数目巨大,且分布式、高集成、智能化特性突出, 依赖单一的传统电池技术已无法满足其深入发展的迫切需求。因此,能够收集人体自身和所处环境中无处不在的多源能量并转化为电能的摩擦纳米发电技术应运而生。它能够为穿戴式电子、电子皮肤、柔性电子等器件和系统提供可持续、无人值守、清洁的能源供给,是一种稳定可靠、高效的能量来源, 在健康监测、生物传感、环境监测、人工智能等领域有着巨大的应用潜力。
过去 10 年里,国内外研究机构针对摩擦纳米发电技术开展了深入广泛的研究,并经历了发电原理与工作模式探索、复合式发电拓展与电路集成和自驱动智能微系统三个发展阶段。当前相关研究主要聚焦在以下三个方面:① 在发电原理与工作模式方面,以电磁场分析和物理模型构建为切入点从源头分析摩擦起电的原理,全面研究接触分离、相对滑动、单电极、悬浮层等四种工作模式及其应用, 建立摩擦发电机的理论模型,研究能量转换机制, 实现高性能的材料 – 结构 – 应用一体化设计;② 在复合式发电与电路集成方面,重点研究摩擦与压电、电磁、光电等原理融合,从而实现高效采集多种环境能量的复合式发电机,研发与发电机输出特性相适应的高效电源管理与存储电路,实现能够高效稳定为微系统供能的电源模块;③ 在自驱动智能微系统方面,研发集中在发电机与传感功能的集成上, 一方面从发电机的输出信号中分析实现外界信号的传感,另一方面让发电机输出的电能为分布式传感器供能,从而让低功耗的微系统能够在无须人为更换电池的情况下长期稳定工作。
摩擦纳米发电机作为可持续发展的微能源领域的下一个难点和制高点是实现智能微系统长期稳定工作的重要技术支撑,通过技术创新和性能提升, 有望满足电子器件分布广、数量大、种类多、长期不间断工作的实际需求,为探索微系统的可持续供能模式提供了极具吸引力的实现方法和技术手段。推进摩擦纳米发电技术的深入发展,可提高我国在可持续发展微能源领域的自主技术水平,从而在自驱动智能微系统的研发领域占据领先地位。
“摩擦纳米发电技术”工程研究前沿中,核心论文发表量与篇均被引频次排在前列的国家是中国和美国(表 1.2.9),且两个国家合作较多(图1.2.6)。在发文量前十的机构中,核心论文发文量排在前列的机构是加利福尼亚大学洛杉矶分校与电子科技大学,篇均被引频次排在前列的机构是斯坦福大学、重庆师范大学和重庆大学(表1.2.10)。其中,重庆师范大学、重庆大学、中国科学院、斯坦福大学合作较多(图 1.2.7)。施引核心论文发文量排在前三位的国家分别是中国、美国和韩
《表 1.2.9》
表 1.2.9 “摩擦纳米发电技术”工程研究前沿中核心论文的主要产出国家
| 序号 | 国家 | 核心论文数 | 论文比例 /% | 被引频次 | 篇均被引频次 | 平均出版年 |
| 1 | 中国 | 18 | 85.71 | 1 053 | 58.5 | 2019.3 |
| 2 | 美国 | 13 | 61.9 | 711 | 54.69 | 2020.2 |
| 3 | 英国 | 2 | 9.52 | 44 | 22 | 2020 |
| 4 | 加拿大 | 1 | 4.76 | 30 | 30 | 2019 |
《图 1.2.6》
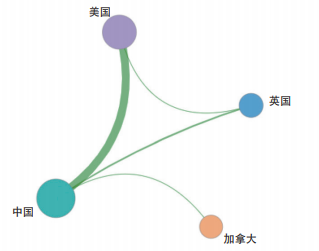
图 1.2.6 “摩擦纳米发电技术”工程研究前沿主要国家间的合作网络
国(表 1.2.11)。施引核心论文的主要产出机构是中国科学院、佐治亚理工学院和加利福尼亚大学洛杉矶分校(表 1.2.12)。图 1.2.8 为“摩擦纳米发电技术”工程研究前沿的发展路线。
《表 1.2.10》
表 1.2.10 “摩擦纳米发电技术”工程研究前沿中核心论文的主要产出机构
| 序号 | 机构 | 核心论文数 | 论文比例 /% | 被引频次 | 篇均被引频次 | 平均出版年 |
| 1 | 加利福尼亚大学洛杉矶分校 | 11 | 52.38 | 449 | 40.82 | 2020.5 |
| 2 | 电子科技大学 | 6 | 28.57 | 353 | 58.83 | 2019.2 |
| 3 | 重庆师范大学 | 3 | 14.29 | 347 | 115.67 | 2019 |
| 4 | 重庆大学 | 3 | 14.29 | 347 | 115.67 | 2019 |
| 5 | 中国科学院 | 3 | 14.29 | 326 | 108.67 | 2018.3 |
| 6 | 斯坦福大学 | 2 | 9.52 | 262 | 131 | 2018.5 |
| 7 | 苏州大学 | 2 | 9.52 | 90 | 45 | 2018.5 |
| 8 | 西南交通大学 | 1 | 4.76 | 96 | 96 | 2020 |
| 9 | 佐治亚理工学院 | 1 | 4.76 | 95 | 95 | 2019 |
| 10 | 宾夕法尼亚州立大学 | 1 | 4.76 | 71 | 71 | 2020 |
《图 1.2.7》
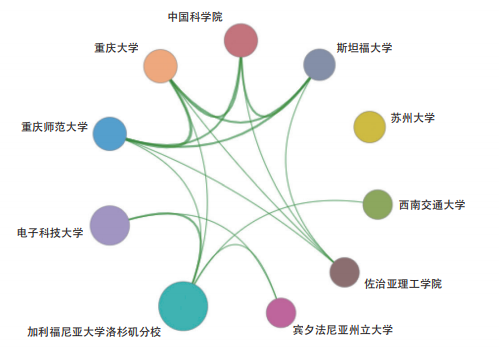
图 1.2.7 “摩擦纳米发电技术”工程研究前沿主要机构间的合作网络
《表 1.2.11》
表 1.2.11 “摩擦纳米发电技术”工程研究前沿中施引核心论文的主要产出国家
| 序号 | 国家 | 施引核心论文数 | 施引核心论文比例 /% | 平均施引年 |
| 1 | 中国 | 524 | 53.58 | 2020.3 |
| 2 | 美国 | 180 | 18.4 | 2020.3 |
| 3 | 韩国 | 86 | 8.79 | 2020.1 |
| 4 | 新加坡 | 47 | 4.81 | 2020.3 |
| 5 | 印度 | 38 | 3.89 | 2020.4 |
| 6 | 英国 | 36 | 3.68 | 2020.4 |
| 7 | 澳大利亚 | 24 | 2.45 | 2020.6 |
| 8 | 马来西亚 | 13 | 1.33 | 2020.8 |
| 9 | 伊朗 | 11 | 1.12 | 2020.7 |
| 10 | 沙特阿拉伯 | 10 | 1.02 | 2020.7 |
《表 1.2.12》
表 1.2.12 “摩擦纳米发电技术”工程研究前沿中施引核心论文的主要产出机构
| 序号 | 机构 | 施引核心论文数 | 施引核心论文比例 /% | 平均施引年 |
| 1 | 中国科学院 | 115 | 25.5 | 2020.2 |
| 2 | 佐治亚理工学院 | 53 | 11.75 | 2019.9 |
| 3 | 加利福尼亚大学洛杉矶分校 | 53 | 11.75 | 2020.6 |
| 4 | 电子科技大学 | 40 | 8.87 | 2020 |
| 5 | 新加坡国立大学 | 39 | 8.65 | 2020.3 |
| 6 | 重庆大学 | 31 | 6.87 | 2020.1 |
| 7 | 广西大学 | 30 | 6.65 | 2020.4 |
| 8 | 苏州大学 | 29 | 6.43 | 2019.7 |
| 9 | 清华大学 | 26 | 5.76 | 2020.2 |
| 10 | 西南交通大学 | 18 | 3.99 | 2020.3 |
《图 1.2.8》
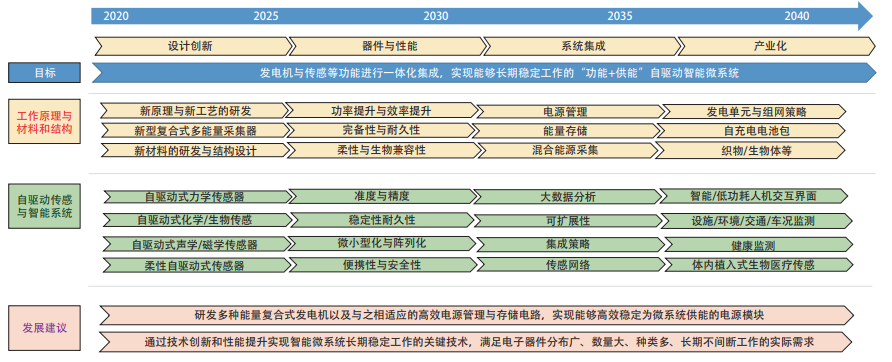
图 1.2.8 “摩擦纳米发电技术”工程研究前沿的发展路线
《2 工程开发前沿》
2 工程开发前沿
《2.1 Top 10 工程开发前沿发展态势》
2.1 Top 10 工程开发前沿发展态势
机械与运载工程领域的 Top 10 工程开发前沿涉及机械工程、船舶与海洋工程、航空宇航科学技术、兵器科学与技术、动力及电气设备工程与技术、交通运输工程等学科方向(表 2.1.1)。其中, 属于传统研究深入的前沿有自主无人系统多传感器融合技术、大涵道比涡扇发动机、航空碳纤维增强复合材料 3D 打印技术、基于声光探测的水下无人机、智能移动机器人控制与感知系统和高功率密度高效率电动机;新兴前沿包括用于船舶舰艇的隐身超材料、新一代氢能燃料电池汽车技术、可回收复用航天器和可调曲度变形柔性机翼。各个开发前沿涉及的核心专利 2016—2021 年公开情况见表 2.1.2。
(1)用于船舶舰艇的隐身超材料
超材料具有天然材料所不具备的性能,拥有超常的物理特性,可以在电磁、声学、光学等维度上
《表 2.1.1》
表 2.1.1 机械与运载工程领域 Top 10 工程开发前沿
| 序号 | 工程开发前沿 | 公开量 | 引用量 | 平均被引数 | 平均公开年 | ||
| 1 | 用于船舶舰艇的隐身超材料 | 52 | 496 | 9.54 | 2018.7 | ||
| 2 | 自主无人系统多传感器融合技术 | 468 | 2 117 | 4.52 | 2019.5 | ||
| 3 | 新一代氢能燃料电池汽车技术 | 333 | 1 335 | 4.01 | 2018.1 | ||
| 4 | 可回收复用航天器 | 71 | 348 | 4.9 | 2017.9 | ||
| 5 | 大涵道比涡扇发动机 | 360 | 4 094 | 11.37 | 2015.8 | ||
| 6 | 可调曲度变形柔性机翼 | 359 | 1 965 | 5.47 | 2017.5 | ||
| 7 | 航空碳纤维增强复合材料 3D 打印技术 | 67 | 219 | 3.27 | 2019.1 | ||
| 8 | 基于声光探测的水下无人机 | 93 | 344 | 3.7 | 2018.6 | ||
| 9 | 智能移动机器人控制与感知系统 | 146 | 2 359 | 16.16 | 2018.5 | ||
| 10 | 高功率密度高效率电动机 | 112 | 303 | 2.71 | 2017.9 | ||
《表 2.1.2》
表 2.1.2 机械与运载工程领域 Top 10 工程开发前沿核心专利逐年公开量
| 序号 | 工程开发前沿 | 2016 | 2017 | 2018 | 2019 | 2020 | 2021 |
| 1 | 用于船舶舰艇的隐身超材料 | 0 | 3 | 12 | 11 | 16 | 6 |
| 2 | 自主无人系统多传感器融合技术 | 12 | 38 | 56 | 80 | 105 | 169 |
| 3 | 新一代氢能燃料电池汽车技术 | 48 | 35 | 45 | 58 | 49 | 65 |
| 4 | 可回收复用航天器 | 3 | 5 | 10 | 13 | 16 | 11 |
| 5 | 大涵道比涡扇发动机 | 50 | 37 | 24 | 23 | 18 | 15 |
| 6 | 可调曲度变形柔性机翼 | 44 | 44 | 59 | 54 | 58 | 36 |
| 7 | 航空碳纤维增强复合材料 3D 打印技术 | 3 | 6 | 8 | 10 | 14 | 22 |
| 8 | 基于声光探测的水下无人机 | 9 | 6 | 23 | 11 | 19 | 18 |
| 9 | 智能移动机器人控制与感知系统 | 6 | 21 | 26 | 22 | 26 | 32 |
| 10 | 高功率密度高效率电动机 | 11 | 17 | 20 | 20 | 14 | 15 |
展现优越的隐身效果。电磁隐身超材料通过多个谐振结构单元耦合、加载高阻超表面等手段提高隐身性能,与传统雷达吸波材料相比,厚度小、吸波性能强,对水面舰艇对抗雷达探测优势显著,在各类隐身超材料中通用性最强。利用声学超材料的低频带隙特性和超常物理特性,可以实现超强的低频吸声、减振、声目标强度控制等功能,其对潜艇的隐身效果最佳,有效降低声波探测的威胁。光学隐身超材料使目标目视发现距离大幅缩短,对光电探测隐蔽性好,但难以对抗雷达探测,适合视距范围内的隐身。目前,舰艇隐身正逐步从以隐身外形为主、局部应用吸波材料向隐身外形和隐身材料并重的方向发展,隐身超材料必将极大地提高装备隐蔽性和作战效能。
(2) 自主无人系统多传感器融合技术
自主无人系统的多传感器融合技术是指以多无人个体构成的集群系统通过融合不同个体间以及同一个体不同类型传感器之间的信息来实现对周围环境的感知,进而完成集群对于复杂环境的理解、目标追踪、区域探测和灾害救援等任务。一方面,各类非结构化作业环境遮挡严重,电磁干扰强, 且无人系统户外作业容易受到各类恶劣天气影响,
导致单一的探测手段精准性差、探测范围严重受限。此外,复杂环境下的待检测目标存在类型多、尺度变化多、形态多样、特征不显著等特点,极大地加大了目标检测识别的难度。另一方面,多传感器融合可以实现各类传感器之间的优势互补以及系统内个体间的信息融合,从而有效地增大无人系统的感知范围,拓展其在各类复杂恶劣环境下的感知能力,显著提升目标检测的准确率。因此, 实现多传感器融合技术将成为无人系统自主化、智能化的重要基石。主要研究方向包括:克服恶劣天气条件和复杂环境影响的多源信息预处理; 异源、异构、异步信息的时空配准;大差异低质、弱相关信息的精确关联。
(3) 新一代氢能燃料电池汽车技术
氢燃料电池汽车是一种用车载燃料电池装置产生的电力作为动力的汽车。在“碳中和”背景下, 氢能已成为加快能源转型升级的重要战略选择。氢燃料电池与现有技术(如内燃机、柴油发动机)相比具有多个优势,如高能量转换效率和扭矩、零排放和低噪声等。氢燃料电池车系统的核心部件包括空压机、氢循环系统、车载储氢系统以及燃料电池电堆。其中燃料电池电堆约占汽车总成本的 60%, 电堆中核心材料部分包括催化剂、质子交换膜、气体扩散层和双极板等。目前的商业贵金属铂基催化剂成本较高(约占电堆成本的 45%),同时其活性和稳定性仍需提高,因此发展高性能的低铂或非铂催化剂是未来方向。质子交换膜是一种固态电解质, 目前研究集中于全氟磺酸质子交换膜和复合质子交换膜,但膜稳定性需要提升,同时制备工艺需要优化。气体扩散层需要满足收集电流、传导气体和排出反应产物水等重要作用,在导电性、结构稳定性、传质特性上仍需提升。双极板是电堆中的“骨架”, 高导电导热性、超薄超轻是发展方向。目前,氢燃料电池关键材料(如催化剂和质子交换膜)仍严重依赖进口,部分技术被国外垄断,因此国内研究仍需不断深入。
(4) 可回收复用航天器
可回收复用航天器作为未来航天器发展的重要方向,是一种能够以有效延长航天器寿命、降低航天器运行成本、提升航天器可靠性和使用便捷性为目标的先进航天器应用模式,可复用载人飞船和货运飞船、航天飞机、重复使用可机动轨道飞行器等均属于典型的可回收复用航天器。随着人类太空探索与开发活动的日益频繁,目前一次使用的航天器由于成本高、准备周期长,已很难满足需求。因此,能更加便捷与廉价地探索、开发和利用太空资源的可回收复用航天器应运而生,已成为当前世界航天技术研究的前沿热点, 各航天大国均将其作为未来航天技术可持续发展的重点突破方向。可回收复用航天器需具备的可回收及可重复使用要求,对传统一次使用航天器的设计理念和方法提出重大挑战,其重点研究方向包括:可重复使用设计理论与方法、可回收复用航天器总体设计、可靠精确返回着陆技术、长时在轨精确轨 / 姿 / 热控与维护技术、高可靠可复用耐高温抗烧蚀热防护技术、结构寿命评估与健康管理技术等。
(5) 大涵道比涡扇发动机
大涵道比涡扇发动机通常是指涵道比为 4 以上的涡扇发动机。大涵道比涡扇发动机的耗油率低、噪声小,广泛应用于大型民用和军用运输机等。大涵道比涡扇发动机的关键技术和发展方向包括:① 高性能,包括大尺寸风扇、高压压气机和低压涡轮的先进热力气动设计与加工制造,如三维叶片的气动设计、叶顶间隙的控制等;② 低污染,采用燃烧控制技术降低氮氧化物等污染物的排放,如分级燃烧、贫油直接喷射、富油 / 快速掺混 / 贫油燃烧等;③ 低噪声,采用先进的气动声学设计和吸声降噪技术降低叶轮机械噪声、喷气噪声和燃烧噪声等;④ 高可靠性,提升发动机整机和关键部件的可靠性,如长寿命大功率减速器的设计和加工制造等。
(6) 可调曲度变形柔性机翼
可调曲度变形柔性机翼是通过结构的柔性变形来调控机翼弯度和厚度的连续、无缝变化。和传统刚性翼面相比,柔性翼面延迟了气流分离,提高了机翼升阻比,降低了气动噪声。相关研究包括四个方面:一是柔性可变形蒙皮,探究面内弹性大变形与面外抗弯承载的解耦设计机制,研究周期性胞元微结构的大变形机制与成型工艺,研究新型拓扑胞元微结构/ 超弹基体复合材料结构技术与变形协调, 目标是实现柔性可变形蒙皮在变形方向具有良好的弹性、在非变形方向具有足够刚度、同时驱动蒙皮变形的力较小;二是可变形支撑骨架结构,开发基于刚柔耦合的结构型式和通过协同优化设计的全柔性结构,研究考虑柔性结构的可调曲度变形柔性机翼气动弹性分析方法与验证,研究变形骨架结构的低应力和高寿命设计方法;三是轻质高效驱动机构, 开发新型轻巧驱动机构,研制高效比的压电、人工肌肉等驱动器,设计智能化控制策略,实现高效率、轻量化和高稳定性驱动系统;四是可调曲度变形柔性机翼集成与实验平台,研究新型结构、智能材料、先进传感与测试技术、高效小型化驱动器等技术与飞机机体集成,开展典型样件风洞测试和全尺寸机翼试飞验证。可调曲度变形柔性机翼技术是变体飞行器的重要方向,是未来绿色航空的发展趋势和飞机结构设计变革的大趋势。
(7) 航空碳纤维增强复合材料 3D 打印技术
航空碳纤维增强复合材料 3D 打印技术是一种基于三维模型数据,通过逐层堆积的方式实现航空碳纤维复合材料零部件制造的技术。该技术根据实现方法的不同,可分为熔丝沉积成形(fused deposition modeling,FDM)法、陶瓷膏体光固化成形(stereolithography apparatus,SLA)法、激光选区烧结(selective laser sintering,SLS) 法、薄材叠层快速成形(laminated object manufacturing, LOM)法,其中 FDM 法因其工艺成熟、成本低、可设计强等优点是当下 3D 打印航空碳纤维复合材料特别是连续碳纤维增强复合材料最常用、研究最广泛的方法。目前大量研究聚焦于揭示 FDM 工艺相关控制参数,如打印路径、打印温度、打印层厚度、打印材料、材料堆叠方式、打印扫描间距等对碳纤维复合材料的微观结构、孔隙率、界面特性、宏观力学性能的影响规律,由此提出针对打印设备、工艺参数、材料预处理等方面的改进与优化方法, 并建立针对 3D 打印航空碳纤维复合材料的力学性能测试方法与评价体系,实现高力学特性复杂航空碳纤维复合材料结构一体化打印制造的目标。
(8) 基于声光探测的水下无人机
基于声光探测的水下无人机主要是指搭载声学和光学类探测传感器执行水下环境目标探测任务的一类水下无人机。目前典型的水下声光类探测传感器包括声呐、激光雷达、视觉摄像头等。
不同探测传感器由于探测原理不同,其探测的效果、完备性也各不相同。水下声学探测传感器原理是指通过接受水声目标辐射噪声或者散射回波, 在一定范围内实现对水声目标的探测、跟踪、定位与识别,在广域海洋环境目标探测中,声学探测是最重要的也是最有效的方式。水下光学探测传感器探测效果易受海洋光学环境条件影响,在可见度良好、平静的浅水海域可实现高精度的目标定位,是声学探测手段的有效补充。
目前该领域主要技术方向包括基于声光传感器的水下目标定位技术、基于深度学习的水下目标检测与识别技术、基于特征学习的自主探测技术等。结合水下无人机自主可控、隐身性能好、机动性能强等优点,为了实现在高维、动态、复杂、多变的水下环境中的有效探测,基于无人移动平台的声光联合探测技术将是该领域未来的发展方向,主要包括环境背景场建模、海洋环境目标特征库构建、多源传感器信息融合、水下无人机结构匹配优化等研究方向。
(9) 智能移动机器人控制与感知系统
智能移动机器人是集环境感知、动态决策与规划、行为控制与执行等多功能于一体的综合系统, 包括陆地移动机器人、水下移动机器人和以无人机为代表的飞行机器人。大部分移动机器人工作在非结构化动态环境,其性能的优劣涉及自主感知、自主导航、运动控制等多种关键技术。自主感知是移动机器人能够自主移动、适应环境、自主完成作业的前提,涉及多传感器信息融合、外参标定、三维目标检测与识别、场景识别与理解等技术。自主导航是移动机器人最为基础和核心的技术,涉及环境感知、地图创建、自主定位、运动规划等一系列技术。运动控制方法影响移动机器人运动和作业的稳定性,代表性的方法有基于运动学、动力学的同时镇定和跟踪控制,基于动态非完整约束的神经网络自适应控制等。移动机器人应用场景众多,要实现移动机器人的自主工作,需要发展高自适应性、高实时性、高可靠性和高移植性的智能化导航系统, 其中涉及的环境信息获取、环境建模、环境认知、导航避障等关键技术将成为智能化移动机器人控制与感知研究的重点。
(10) 高功率密度高效率电机
高功率密度高效率电机是一类结构紧凑、功重比高、节能性好的电磁机电能量转换装置,应用于新能源发电、电气化交通、高档数控机床和机器人以及航空航天装备等多领域,是上述装置装备的核心动力单元和关键执行部件。以电气化为代表的新一轮能量动力系统技术革命正在重构全球载运工具、制造业等产业格局,高功率密度高效率电机技术作为电气化核心机电能量转换装备,成为各国竞相争抢的技术制高点。但是由于受到材料、热管理及严苛环境条件等因素的制约,电机功率密度和效率的提升遇到多重挑战。目前业界主要围绕新型高转矩密度电磁拓扑、先进电工材料应用及精细化建模、高频损耗抑制、高效散热方法、结构集成与轻量化、多物理场协同优化设计等方向来展开研究, 力图从强聚磁及多谐波磁场调制电磁新原理,超级铜线、超导等新电工材料,相变传热及直接油冷等新冷却技术,电 – 热 – 力多物理场协同智能优化新设计方法等方面进行关键技术突破来进一步提高电机的功率密度与效率运行极限,满足高功率密度高效率电机在新一代电气化交通载运工具和智能制造等新兴产业及多电战机、多电坦克等尖端武器装备中的应用需求并实现性能突破。
《2.2 Top 3 工程开发前沿重点解读》
2.2 Top 3 工程开发前沿重点解读
2.2.1 用于船舶舰艇的隐身超材料
增强隐蔽性、对抗敌方综合探测体系,能直接提高舰艇生命力和作战效能。面对不断发展的探测手段,传统吸波材料的性能亟须提升,具有超常物理特性的超材料成为研究热点,在电磁、声学、光学等维度上展现出优越的隐身效果。
电磁隐身超材料通过多个谐振结构单元耦合、加载高阻超表面等手段提高隐身性能,与传统雷达吸波材料相比,其厚度小、吸波性能强,美军DDG1000 大型驱逐舰、雷神公司透波率可控人工复合蒙皮材料是其典型应用。利用声学超材料的低频带隙特性和超常物理特性,可以实现超强的低频吸声、减振、声目标强度控制等功能。美国研究机构将六角晶胞铝制超材料用于水下装备的涂覆层,使水下装备可在声呐探测下隐身,拟将其应用于“弗吉尼亚”级核潜艇。中国科学院声学研究所研制的“三维水下隐身毯”、美国杜克大学的“声学斗篷”均利用超材料实现对声波隐身。此外,可见光波段的隐身超材料使目标目视发现距离大幅缩短,以“变色龙”超材料为代表, 美国、俄罗斯等国家的研究机构利用电致变色玻璃原理研制出能随环境改变颜色和纹理的超材料, 并应用于装备涂层实现光学隐身。
总体来看,电磁超材料对水面舰艇对抗雷达探测优势显著,在各类隐身超材料中通用性最强。声学超材料对潜艇的隐身效果最佳,可以有效降低声波探测的威胁。光学隐身超材料对光电探测隐蔽性好,但难以对抗雷达探测,适合视距范围内的隐身。目前,舰艇隐身正逐步从隐身外形为主、局部应用吸波材料向隐身外形和隐身材料并重的方向发展,隐身超材料必将极大地提高装备隐蔽性和作战效能。
目前,该前沿核心专利产出数量较多的国家是中国,核心专利的平均被引数排在前列的国家是加拿大、英国和美国(表 2.2.1)。其中,加拿大与英国合作较多,美国与印度合作较多(图 2.2.1)。核心专利产出数量较多的机构是光启尖端技术股份有限公司、航天特种材料及工艺技术研究所和洛阳尖端装备技术有限公司(表 2.2.2)。在核心专利的主要产出机构中,中国航空工业集团公司沈阳飞机设计研究所与中国人民解放军国防科技大学存在合作(图 2.2.2)。图 2.2.3 为“用于船舶舰艇的隐身超材料”工程开发前沿的发展路线。
2.2.2 自主无人系统多传感器融合技术
近年来,世界各发达国家和经济体纷纷提出了无人系统技术发展路线图,加紧布局,抢占战略制高点。国务院印发的《“十三五”国家信息化规划》中提到,海洋无人系统需要与北斗导航、卫星、浮空平台和飞机遥感协作形成全球服务能力,强调了多源信息融合的重要性。国家“十四五”规划进一步指出要加强重大灾害防治先进技术装备创新与应用,对自主无人系统在复杂环境下的感知与探测能力提出了越来越严苛的要求。如何兼顾高精度和大范围这两个需求,保证无人系统探测既“看得清”
《表 2.2.1》
表 2.2.1 “用于船舶舰艇的隐身超材料”工程开发前沿中核心专利的主要产出国家
| 序号 | 国家 | 公开量 | 公开量比例/% | 被引数 | 被引数比例 /% | 平均被引数 |
| 1 | 中国 | 38 | 73.08 | 114 | 22.98 | 3 |
| 2 | 美国 | 8 | 15.38 | 322 | 64.92 | 40.25 |
| 3 | 韩国 | 2 | 3.85 | 2 | 0.4 | 1 |
| 4 | 加拿大 | 1 | 1.92 | 44 | 8.87 | 44 |
| 5 | 英国 | 1 | 1.92 | 44 | 8.87 | 44 |
| 6 | 印度 | 1 | 1.92 | 20 | 4.03 | 20 |
| 7 | 日本 | 1 | 1.92 | 10 | 2.02 | 10 |
| 8 | 荷兰 | 1 | 1.92 | 3 | 0.6 | 3 |
| 9 | 西班牙 | 1 | 1.92 | 1 | 0.2 | 1 |
《图 2.2.1》
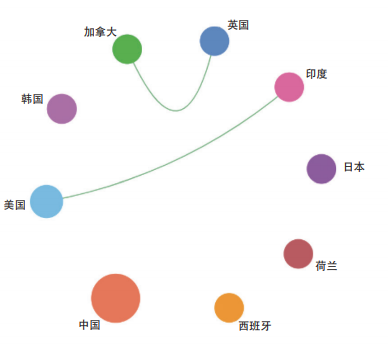
图 2.2.1 “用于船舶舰艇的隐身超材料”工程开发前沿主要国家间的合作网络
《表 2.2.2》
表 2.2.2 “用于船舶舰艇的隐身超材料”工程开发前沿中核心专利的主要产出机构
| 序号 | 机构 | 公开量 | 公开量比例/% | 被引数 | 被引数比例/% | 平均被引数 |
| 1 | 光启尖端技术股份有限公司 | 7 | 13.46 | 8 | 1.61 | 1.25 |
| 2 | 航天特种材料及工艺技术研究所 | 5 | 9.62 | 20 | 4.03 | 4 |
| 3 | 洛阳尖端装备技术有限公司 | 3 | 5.77 | 7 | 1.41 | 2.33 |
| 4 | 东南大学 | 2 | 3.85 | 10 | 2.02 | 5 |
| 5 | 豪威集团 | 1 | 1.92 | 285 | 57.46 | 285 |
| 6 | Lamda Guard 科技公司 | 1 | 1.92 | 44 | 8.87 | 44 |
| 7 | Invictus Oncology 公司 | 1 | 1.92 | 20 | 4.03 | 20 |
| 8 | 中国航空工业集团公司沈阳飞机设计研究所 | 1 | 1.92 | 17 | 3.43 | 17 |
| 9 | 中国人民解放军国防科技大学 | 1 | 1.92 | 17 | 3.43 | 17 |
| 10 | 中国船舶工业集团有限公司 | 1 | 1.92 | 13 | 2.62 | 13 |
《图 2.2.2》
图 2.2.2 “用于船舶舰艇的隐身超材料”工程开发前沿主要机构间的合作网络
又“识得全”已经成为研究的重点。多传感器融合技术可以实现多体多源传感器协同动态感知,做到同时提升感知系统的精度和范围,是解决复杂环境感知问题必不可少的一环。
目前国内外已开展了自主无人系统多传感器融合的相关研究,出现了搭载双目视觉、激光雷达、导航雷达、毫米波雷达、侧扫声呐等传感器的多源信息配准系统,以及搭载侧扫声呐、磁力仪等多源传感器的异构无人集群海洋探测系统,对空中、水面、水下传感信息的动态配准与同步传输也已取得了一定的成果。例如,华中科技大学人工智能与自动化学院已实现多源配准– 深度融合 – 协同追踪的一体化技术将探测模式从平面拓展为立体,检测遗落率小于 0.8%。
但是,自主无人系统多传感器融合仍存在着低质信息关联、深度特征融合、时空同步配准等重大挑战。不同传感器之间存在采样频率不一致、空间坐标不统一、数据形式多样化的特点,给多传感器融合带来了困难。而集群中个体之间的姿态差异以及环境特征不显著的特点进一步加剧了空间配准的难度。此外,坑洼、泥泞、树林、障碍物等会阻挡和衰减信号,影响无线通信的可靠性,导致个体间的信息交互不能保证连续,由此产生的大量异质和残缺信息难以关联和互补。因此,亟须提出异源、异构、异步传感器信息的融合方法,开展自主无人集群多传感器融合,构建广域感知地图,使系统具
《图 2.2.3》
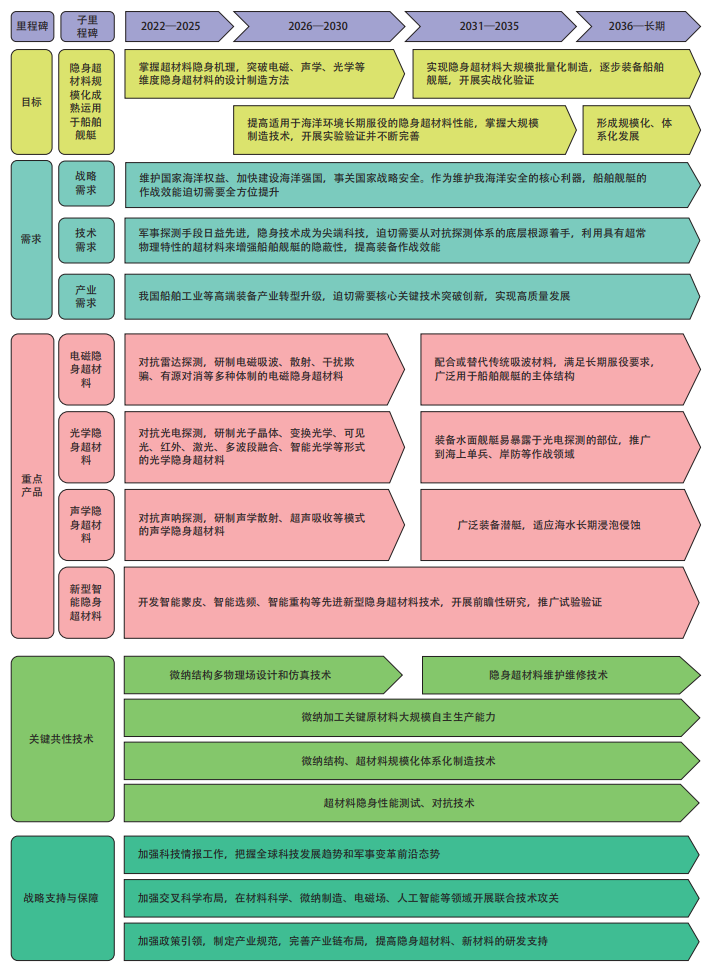
图 2.2.3 “用于船舶舰艇的隐身超材料”工程开发前沿的发展路线
备全天候、适应复杂天气的环境感知能力。相关研究方向包括:针对传感器之间标定步骤多、耗时长的特点,研究传感器快速标定与配准方法;研究异源、异构、异步信息的时空配准方法,揭示异源、异构、异步感知信息的融合规律;研究大差异弱相关传感信息的精确关联方法;研究基于多传感器数据融合的语义地图和环境网络的构建方法;研究各类传感器特征空间的映射方法,实现信息的特征层深度融合。
目前,该前沿核心专利产出数量较多的国家是中国,核心专利的平均被引数排在前列的国家是美国和英国(表 2.2.3),核心专利的主要产出国家之间没有合作。核心专利产出数量排在前列的机构是南京航空航天大学、国家电网有限公司和航天特种材料及工艺技术研究所(表 2.2.4),其中,南京航空航天大学与北京航空航天大学存在合作(图2.2.4)。图 2.2.5 为“自主无人系统多传感器融合技术”工程开发前沿的发展路线。
《表 2.2.3》
表 2.2.3 “自主无人系统多传感器融合技术”工程开发前沿中核心专利的主要产出国家
| 序号 | 国家 | 公开量 | 公开量比例 /% | 被引数 | 被引数比例 /% | 平均被引数 |
| 1 | 中国 | 458 | 97.86 | 1 940 | 91.64 | 4.24 |
| 2 | 美国 | 5 | 1.07 | 152 | 7.18 | 30.4 |
| 3 | 韩国 | 2 | 0.43 | 1 | 0.05 | 0.5 |
| 4 | 日本 | 2 | 0.43 | 0 | 0 | 0 |
| 5 | 英国 | 1 | 0.21 | 24 | 1.13 | 24 |
《表 2.2.4》
表 2.2.4 “自主无人系统多传感器融合技术”工程开发前沿中核心专利的主要产出机构
| 序号 | 机构 | 公开量 | 公开量比例 /% | 被引数 | 被引数比例 /% | 平均被引数 |
| 1 | 南京航空航天大学 | 15 | 3.21 | 138 | 6.52 | 9.2 |
| 2 | 国家电网有限公司 | 12 | 2.56 | 29 | 1.37 | 2.42 |
| 3 | 航天特种材料及工艺技术研究所 | 10 | 2.14 | 37 | 1.75 | 3.7 |
| 4 | 哈尔滨工程大学 | 9 | 1.92 | 49 | 2.31 | 5.44 |
| 5 | 北京航空航天大学 | 9 | 1.92 | 33 | 1.56 | 3.67 |
| 6 | 中国电子科技集团公司 | 9 | 1.92 | 27 | 1.28 | 3 |
| 7 | 深圳大疆创新科技有限公司 | 8 | 1.71 | 109 | 5.15 | 13.62 |
| 8 | 清华大学 | 8 | 1.71 | 71 | 3.35 | 8.88 |
| 9 | 中国人民解放军国防科技大学 | 8 | 1.71 | 22 | 1.04 | 2.75 |
| 10 | 天津大学 | 7 | 1.5 | 88 | 4.16 | 12.57 |
《图 2.2.4》
图 2.2.4 “自主无人系统多传感器融合技术”工程开发前沿主要机构间的合作网络
《图 2.2.5》
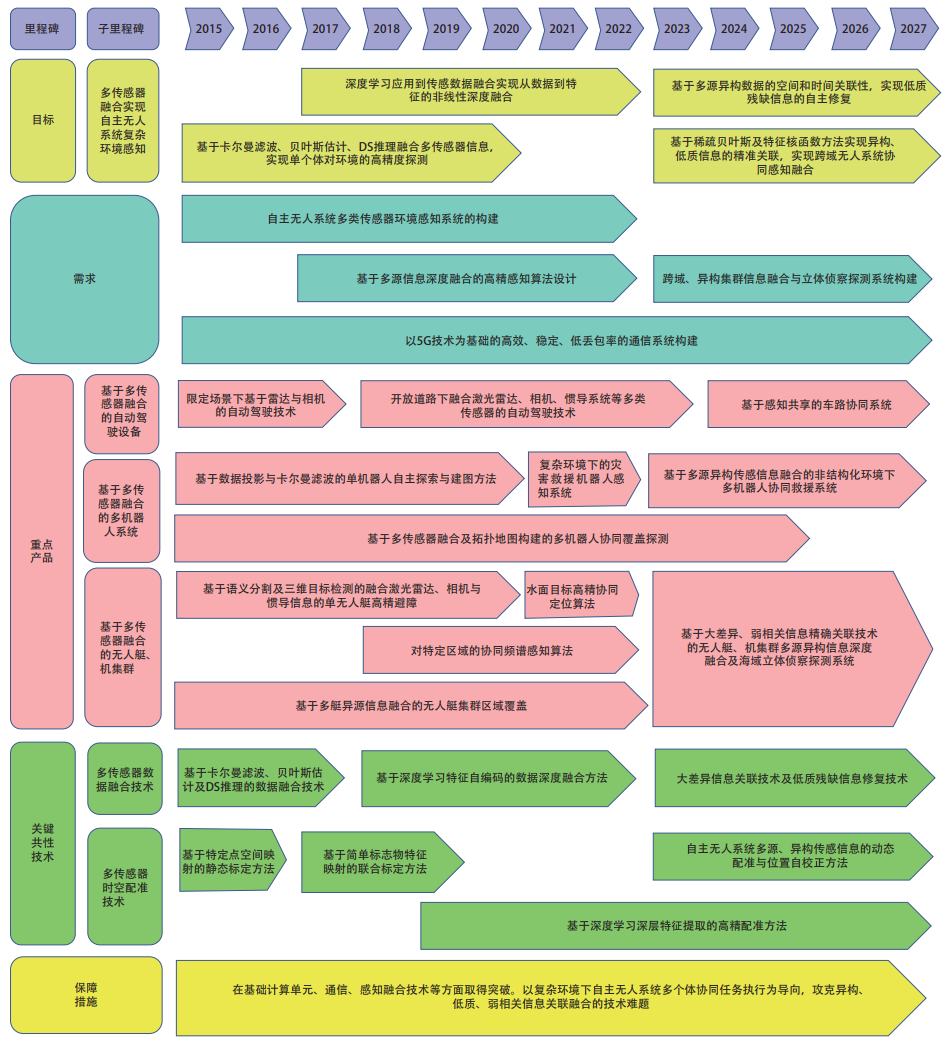
图 2.2.5 “自主无人系统多传感器融合技术”工程开发前沿的发展路线
2.2.3 新一代氢能燃料电池汽车技术
氢燃料电池可实现氢能的移动化、轻量化和大规模普及,能广泛应用于交通、工业、建筑、军事等领域。在道路交通领域中,氢能凭借零污染、可再生、加氢快、续航足等优势被誉为车用能源的“终极形式”。 20 世纪 60 年代,燃料电池在美国国家航空航天局(NASA)双子星航天飞船上首次被应用。21 世纪,氢能技术发展逐渐成熟,日本丰田 2014 年推出全球首款量产型氢燃料电池汽车 MIRAI,2020 年推出的二代车续航里程可达到850 km。结合氢燃料电池的技术特性,我国工业和信息化部与中国汽车工程学会确定氢燃料电池未来主要应用于固定路线、中长途干线、高载重的卡车,计划在未来 5~10 年内实现燃料电池重型载卡车商业化运营,逐步替代传统燃油车市场。
为了满足商业化的需求,目前氢燃料电池中的关键材料如催化剂、质子交换膜、气体扩散层和双极板的性能仍需改进。在催化剂侧,通过铂颗粒纳米化和合金化能够显著提升催化剂的质量活性并降低铂使用量,但是合金催化剂在燃料电池高电压、强酸性工况条件下的稳定性仍需要进一步提升。非贵金属催化剂如金属– 氮 – 碳催化剂的活性已经可以媲美商业铂碳,但是稳定性亟须提升。商业的质子交换膜为全氟磺酸树脂,需要通过材料复合提升其结构强度并降低成本。气体扩散层由宏观多孔基材和微孔层组成,需要满足高电阻率、电极结构稳定、亲水 / 憎水平衡以及气体传输效率高等,目前技术仍被国外垄断。双极板的质量和体积占电堆的80% 以上,所以降低双极板密度和厚度是提升电堆功率密度的重要一环。除电堆外,在储氢技术方面,低温液态储氢将成为未来车载长续航使用需求的最佳解决方案。同时在整个燃料电池系统管理中,氢气供给循环系统、空气供给系统、水热管理系统、电控系统以及数据采集系统都需要进一步优化,以保证燃料电池具有高的能量转换效率以及能量输出功率。
总的来说,发展氢燃料电池汽车,需要进一步降低燃料电池中关键材料的成本并提升材料的重要性能指标(如在工况条件下的稳定性)。同时, 配套的电解水制氢以及氢的运输技术问题也亟待解决。
目前,该前沿核心专利产出数量较多的国家是中国、日本和韩国,核心专利的平均被引数排在前列的国家是沙特阿拉伯、法国和比利时(表2.2.5)。其中,日本与美国、奥地利两个国家存在合作,美国与韩国之间存在合作(图 2.2.6)。核心专利产出数量较多的机构是现代汽车公司、丰田汽车公司和起亚汽车公司(表 2.2.6)。专利主要产出机构中,现代汽车公司与起亚汽车公司存在合作(图 2.2.7)。图 2.2.8 为“新一代氢能燃料电池汽车技术”工程开发前沿的发展路线。
《表 2.2.5》
表 2.2.5 “新一代氢能燃料电池汽车技术”工程开发前沿中核心专利的主要产出国家
| 序号 | 国家 | 公开量 | 公开量比例 /% | 被引数 | 被引数比例 /% | 平均被引数 |
| 1 | 中国 | 123 | 36.94 | 222 | 16.63 | 1.8 |
| 2 | 日本 | 94 | 28.23 | 484 | 36.25 | 5.15 |
| 3 | 韩国 | 84 | 25.23 | 412 | 30.86 | 4.9 |
| 4 | 美国 | 14 | 4.2 | 93 | 6.97 | 6.64 |
| 5 | 德国 | 14 | 4.2 | 37 | 2.77 | 2.64 |
| 6 | 比利时 | 2 | 0.6 | 21 | 1.57 | 10.5 |
| 7 | 沙特阿拉伯 | 1 | 0.3 | 52 | 3.9 | 52 |
| 8 | 法国 | 1 | 0.3 | 11 | 0.82 | 11 |
| 9 | 西班牙 | 1 | 0.3 | 3 | 0.22 | 3 |
| 10 | 奥地利 | 1 | 0.3 | 0 | 0 | 0 |
《图 2.2.6》
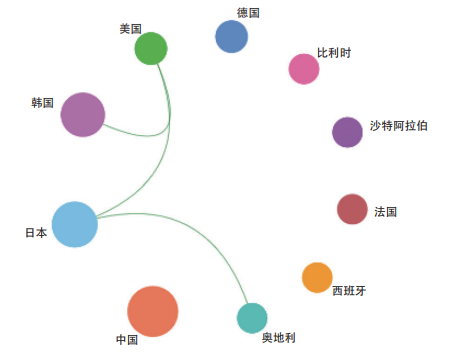
图 2.2.6 “新一代氢能燃料电池汽车技术”工程开发前沿主要国家间的合作网络
《表 2.2.6》
表 2.2.6 “新一代氢能燃料电池汽车技术”工程开发前沿中核心专利的主要产出机构
| 序号 | 机构 | 公开量 | 公开量比例 /% | 被引数 | 被引数比例 /% | 平均被引数 |
| 1 | 现代汽车公司 | 79 | 23.72 | 408 | 30.56 | 5.16 |
| 2 | 丰田汽车公司 | 63 | 18.92 | 272 | 20.37 | 4.32 |
| 3 | 起亚汽车公司 | 38 | 11.41 | 190 | 14.23 | 5 |
| 4 | 武汉格罗夫氢能汽车有限公司 | 32 | 9.61 | 41 | 3.07 | 1.28 |
| 5 | 本田汽车公司 | 9 | 2.7 | 45 | 3.37 | 5 |
| 6 | 东风日产汽车公司 | 5 | 1.5 | 113 | 8.46 | 22.6 |
| 7 | 奥迪汽车公司 | 5 | 1.5 | 30 | 2.25 | 6 |
| 8 | 国家电网有限公司 | 5 | 1.5 | 3 | 0.22 | 0.6 |
| 9 | 武汉地质资源环境工业技术研究院有限公司 | 4 | 1.2 | 11 | 0.82 | 2.75 |
| 10 | 三菱汽车公司 | 4 | 1.2 | 5 | 0.37 | 1.25 |
《图 2.2.7》
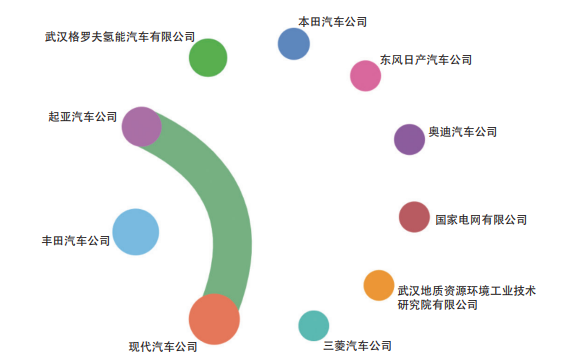
图 2.2.7 “新一代氢能燃料电池汽车技术”工程开发前沿主要机构间的合作网络
《图 2.2.8》
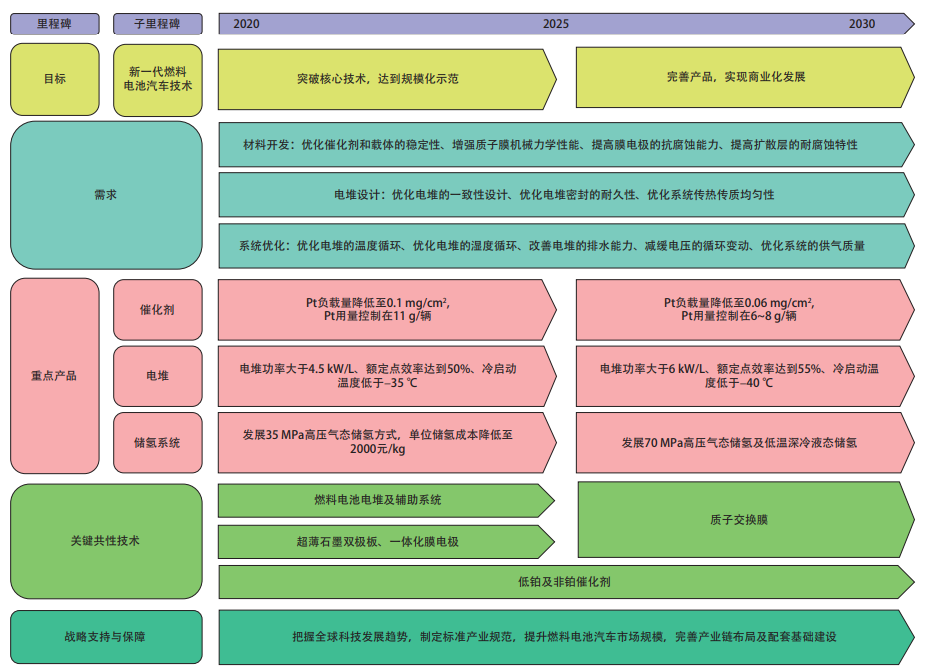
图 2.2.8 “新一代氢能燃料电池汽车技术”工程开发前沿的发展路线
领域课题组人员
课题组组长:李培根 郭东明
院士专家组:
王华明 冯煜芳 严新平 杨德森 林忠钦
高金吉 徐 青 肖龙旭 杨树兴 王向明
朱 坤 徐芑南 徐德民
其他专家组:
樊小强 吴家刚 杨勇平 杨树明 宋 波
司小胜 蔡建国 田大新 李隆球 刘 俊
刘海涛 刘 巍 刘辛军 田 煜 黄海鸿
向先波 陈玉丽 刘佳敏 李长河 袁成清
徐 兵 曹华军 侯淑娟 陈根良 武元新
姚 涛 王新云 李秦川 豆志河 王文先
王 平 张卫华 王少萍 王西彬 王开云
陈本永 陈 蓉 何清波 王海斗 毕传兴
朱继宏 张 珂 杨立兴 黄明辉 谷国迎
郭为忠 王文先 陈伟球 尧命发 殷国栋
杨明红 邾继贵 于溯源 詹 梅 李永兵
黄传真 蒋文春 曾祥瑞 李新宇 杨新文
史铁林 夏 奇 龙 胡 刘智勇
执笔组:
陈 欣 熊蔡华 郭家杰 张海霞 范大鹏
严新平 张 晖 金 朋 张园园 夏 奇
郑建国 罗 欣 孙 博 苑伟政 张海涛
黄志辉 黄云辉 李 箐 刘晓伟 毛义军
李毅超 李宝仁 张建星 陈文斌 曲荣海
史铁林 陈惜曦











 京公网安备 11010502051620号
京公网安备 11010502051620号




