2019年 第5卷 第1期
《工程(英文)》 >> 2019年 第5卷 第1期 doi: 10.1016/j.eng.2018.11.014
通过双RGB-D传感器融合增强对未知环境的自主探索和地图绘制
a Institute of Robotics and Automatic Information Systems, Nankai University, Tianjin 300353, China
b Tianjin Key Laboratory of Intelligent Robotics, Nankai University, Tianjin 300353, China
c State Key Laboratory of Robotics, Shenyang Institute of Automation, Chinese Academy of Sciences, Shenyang 110016, China
下一篇 上一篇
摘要
对未知环境的自主探索和地图构建具有广泛的应用价值和重要的现实意义。现有方法多采用距离传感器生成二维栅格地图。红/ 绿/ 蓝深度(red/green/blue-depth,RGB-D)传感器提供环境的颜色和深度信息,从而生成三维(three-dimensional,3D)点云地图,便于人类直观感知。本文提出了一种利用双RGB-D 传感器实现未知室内环境自动探测和测绘的系统方法。通过同步处理RGB-D数据,生成定位点,逐步构建三维点云图和二维栅格地图。紧接着,探索方法被建模为一个部分可观测的马尔科夫决策过程,将局部地图推演和全局边界搜索方法相结合进行自主探索,将动态行为约束用于运动控制。这有效避免了局部最优,保证了探测效果。在单连通和多分支区域的实验表明,该方法具有较好的鲁棒性和较高的效率。
图片
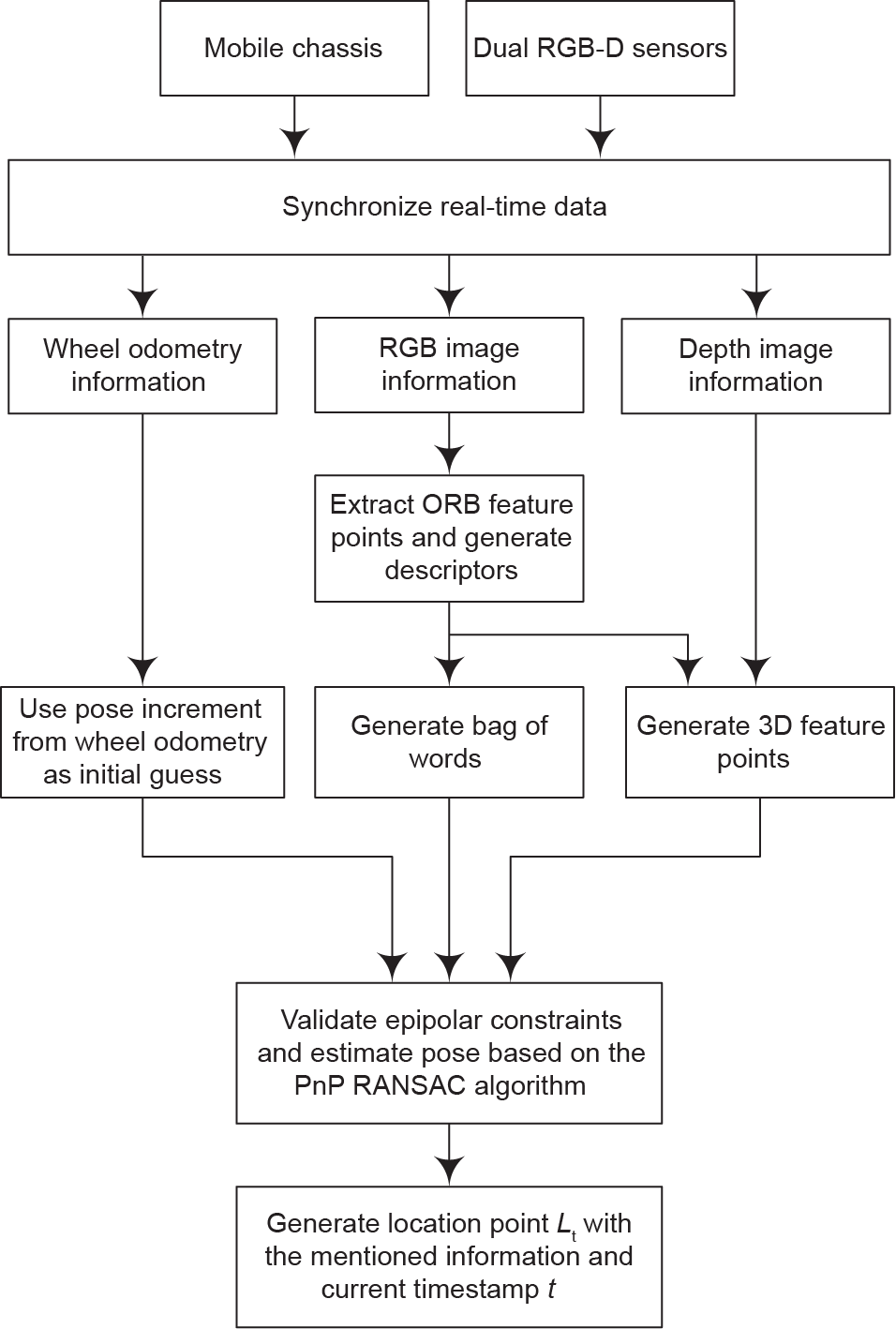
图1
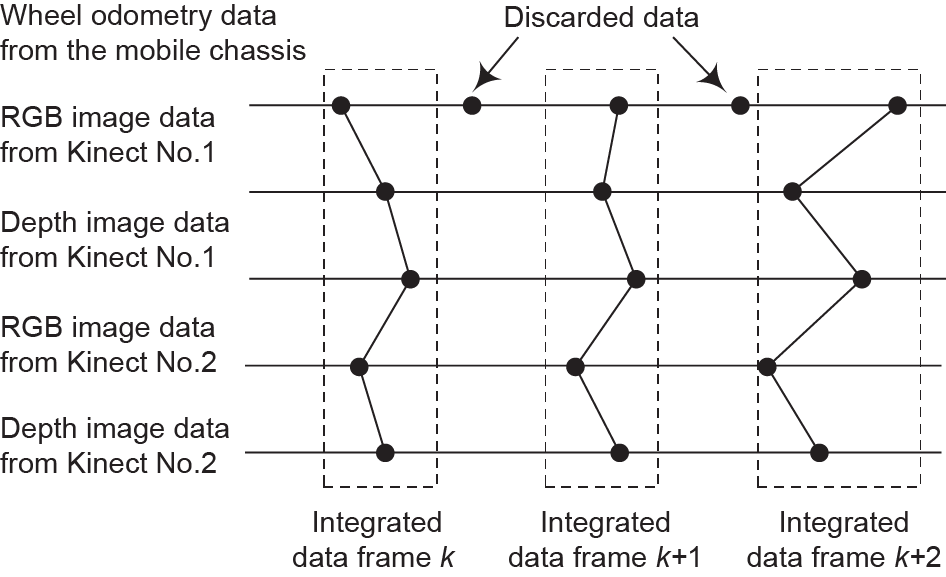
图2
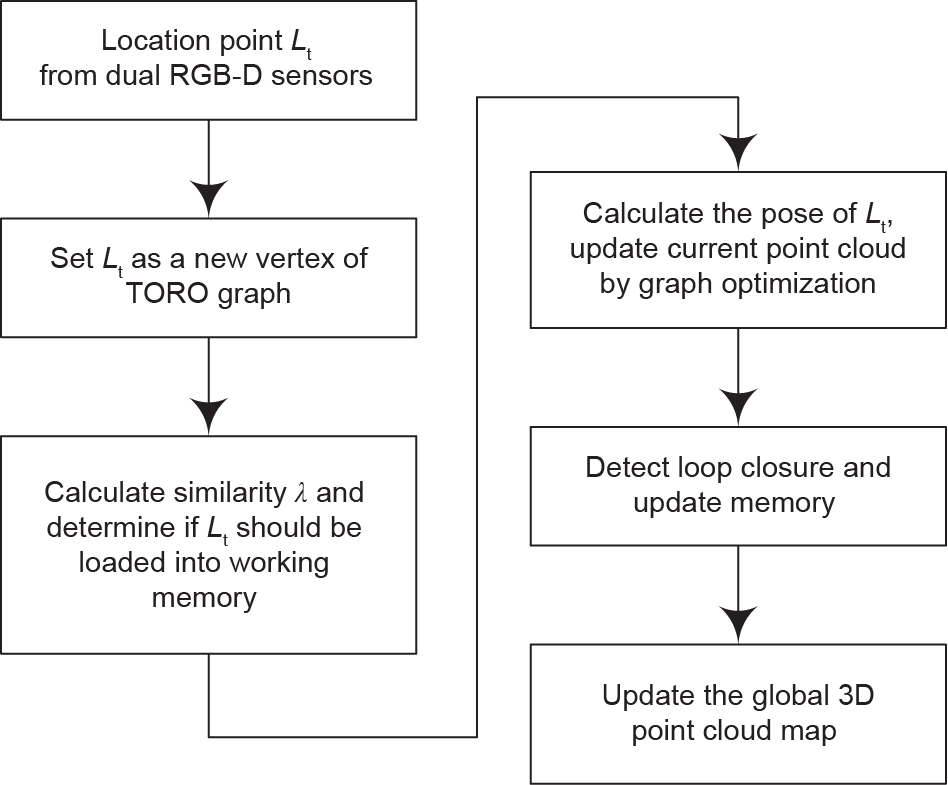
图3
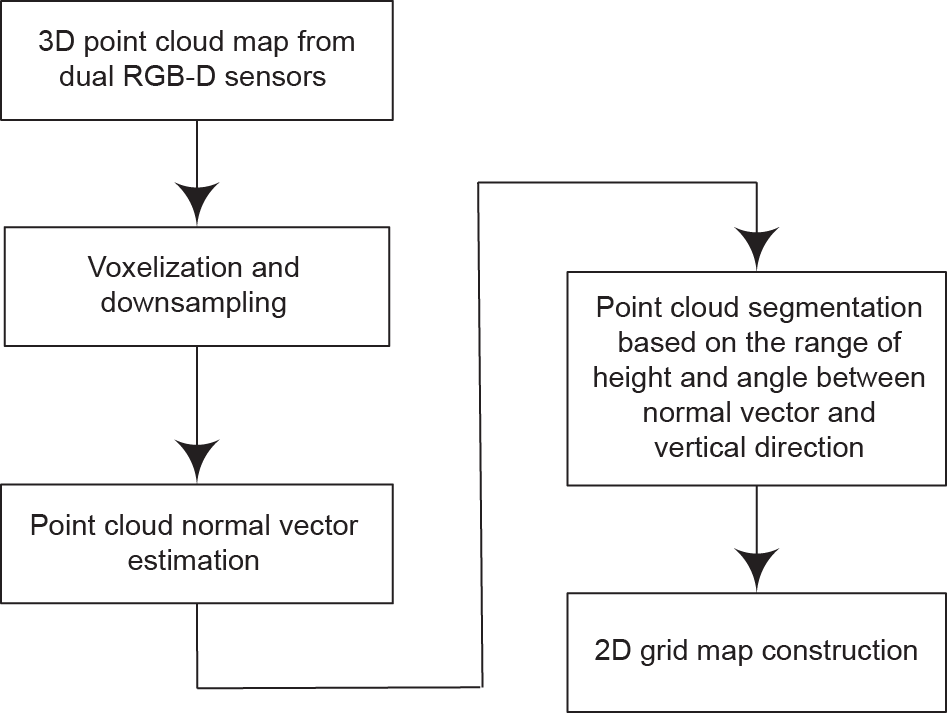
图4
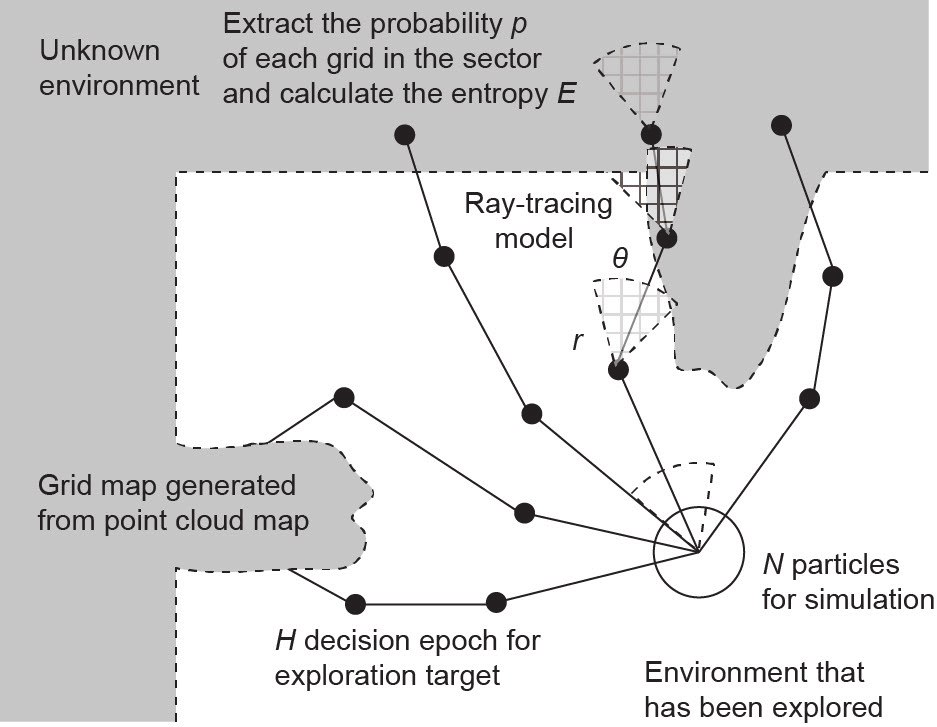
图5
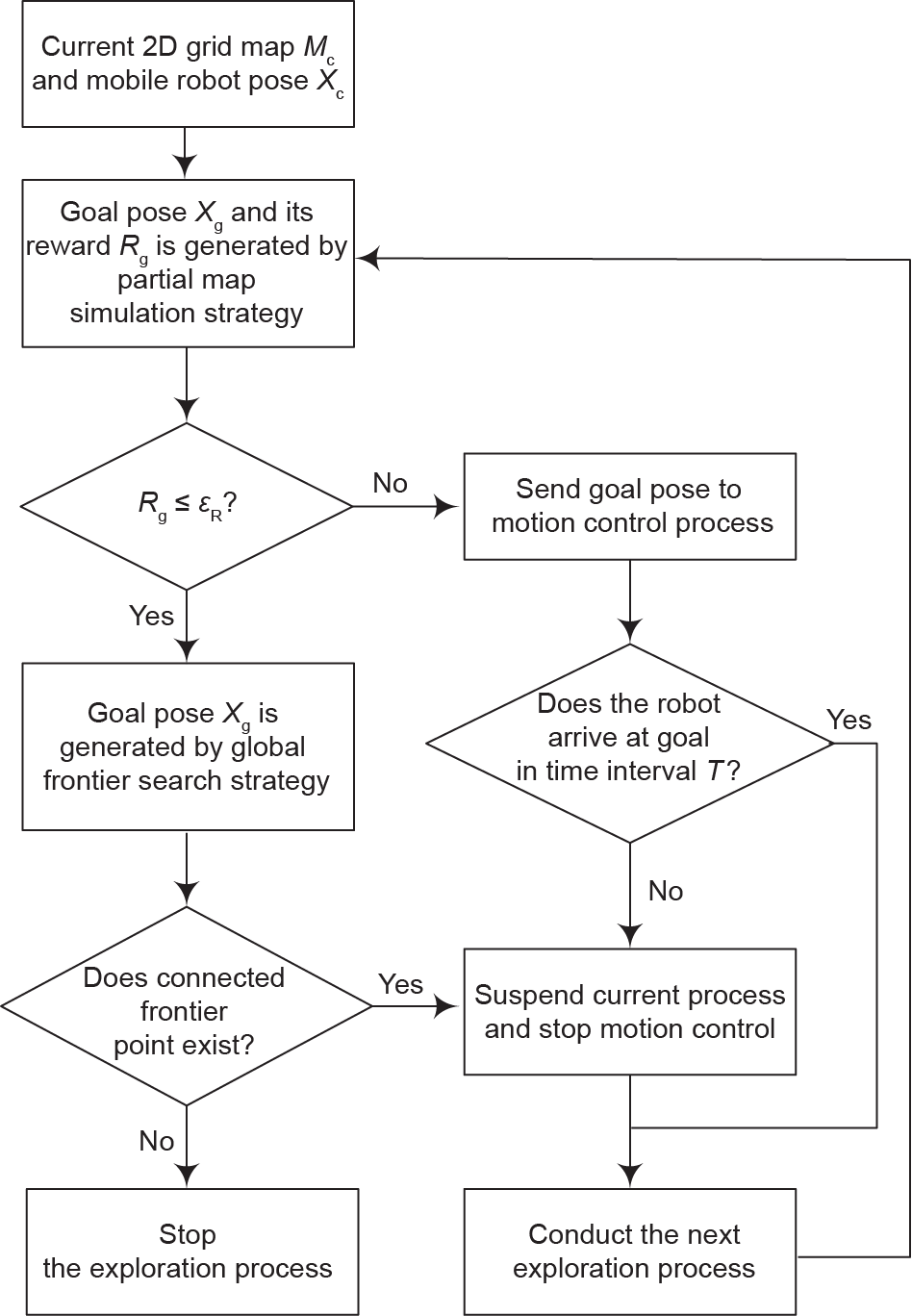
图6
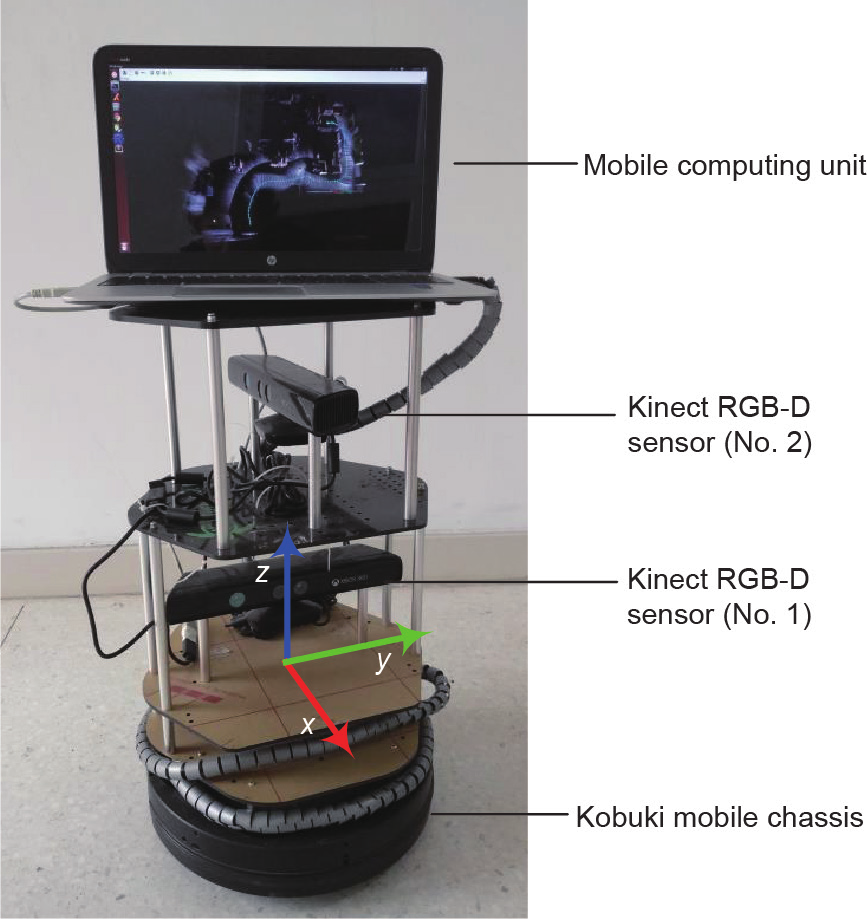
图7
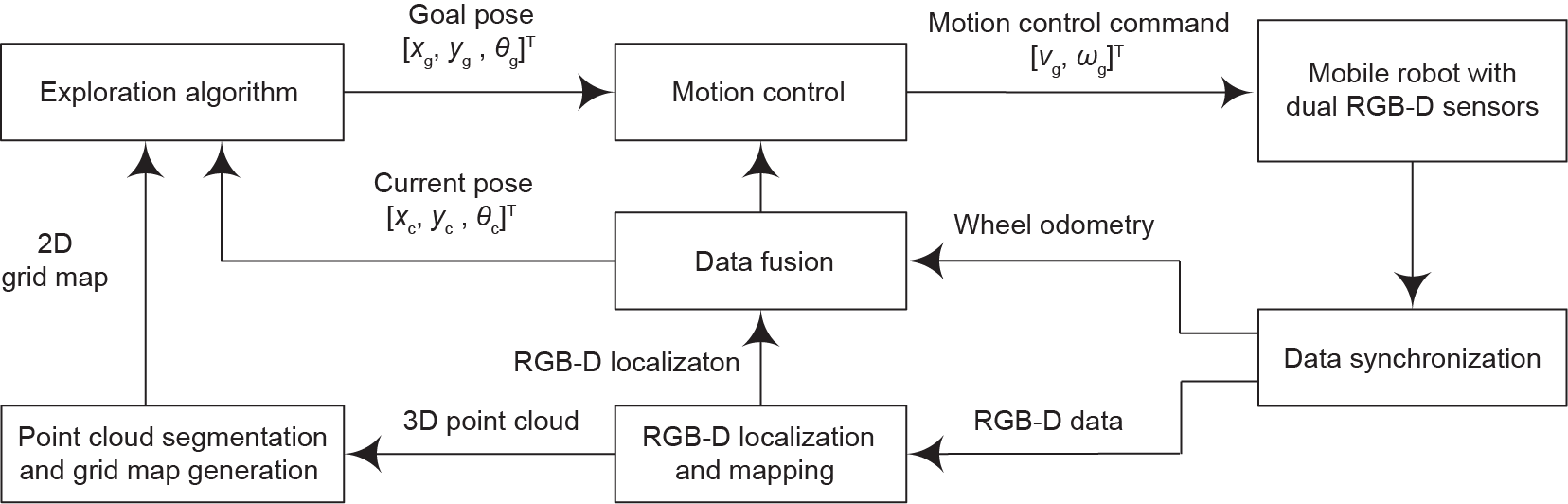
图8
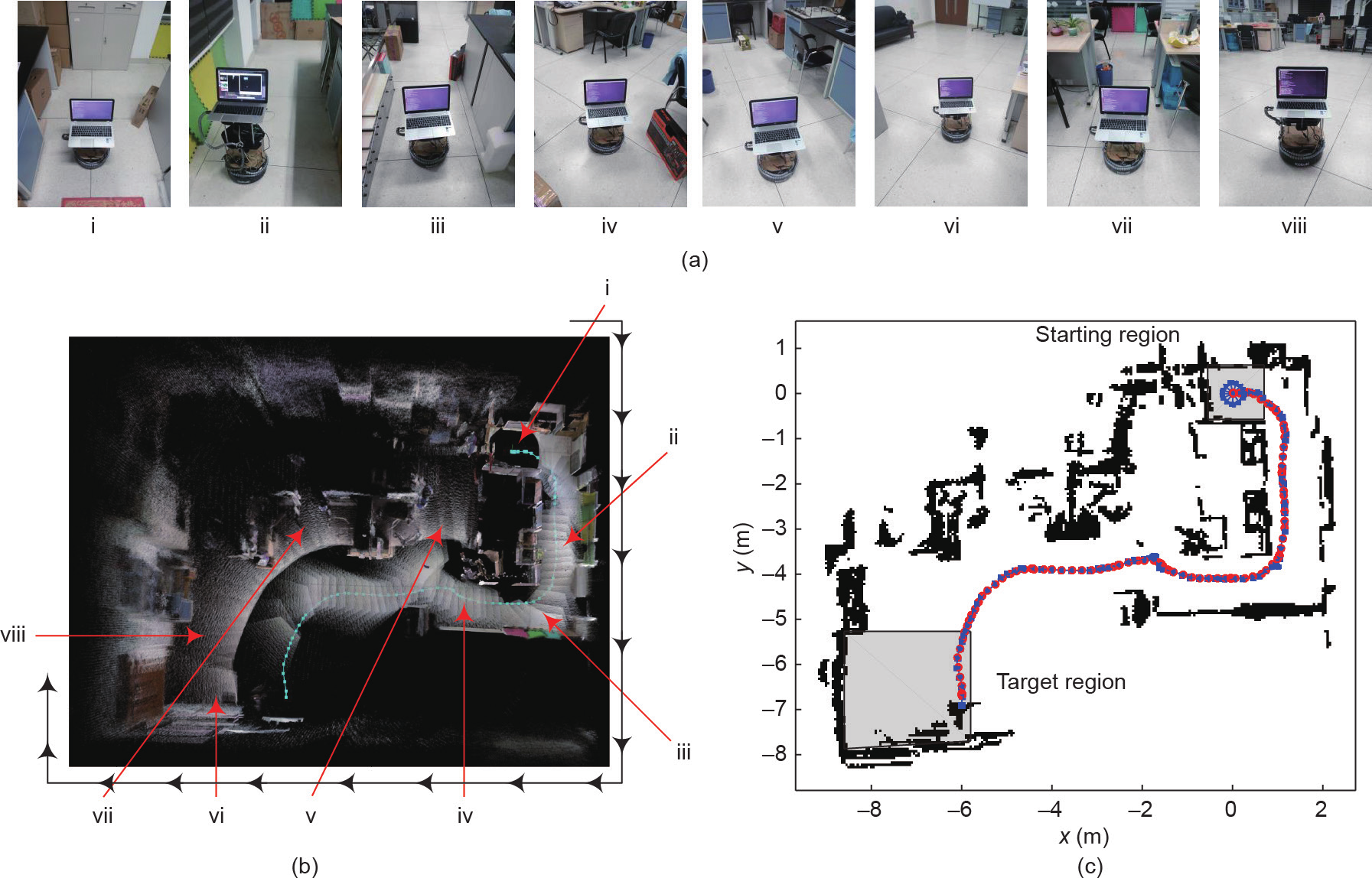
图9
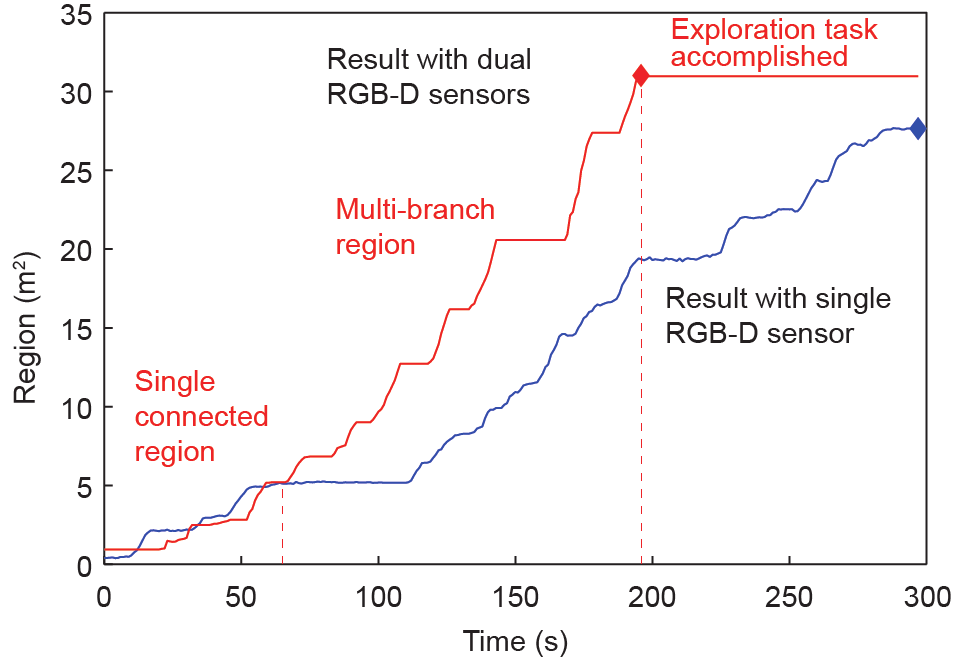
图10
参考文献
[ 1 ] Ström DP, Bogoslavskyi I, Stachniss C. Robust exploration and homing for autonomous robots. Robot Auton Syst 2017;90:125–35. 链接1
[ 2 ] Zhang Z, Nejat G, Guo H, Huang P. A novel 3D sensory system for robot-assisted mapping of cluttered urban search and rescue environments. Intell Serv Robot 2011;4(2):119–34. 链接1
[ 3 ] Huang J, Ri M, Wu D, Ri S. Interval type-2 fuzzy logic modeling and control of a mobile two-wheeled inverted pendulum. IEEE Trans Fuzzy Syst 2017;26 (4):2030–8. 链接1
[ 4 ] Gai S, Jung EJ, Yi BJ. Multi-group localization problem of service robots based on hybrid external localization algorithm with application to shopping mall environment. Intell Serv Robot 2016;9(3):257–75. 链接1
[ 5 ] Pirbhulal S, Zhang H, Alahi M, Ghayvat H, Mukhopadhyay SC, Zhang Y, et al. A novel secure IoT-based smart home automation system using a wireless sensor network. Sensors 2016;17(1):69–87. 链接1
[ 6 ] Huang J, Xu W, Mohammed S, Shu Z. Posture estimation and human support using wearable sensors and walking-aid robot. Robot Auton Syst 2015;73:24–43. 链接1
[ 7 ] Krajnïk T, Santos JM, Duckett T. Life-long spatiotemporal exploration of dynamic environments. In: Proceedings of the European Conference on Mobile Robots; 2015 Sep 2–4. Lincoln, UK. New York: IEEE; 2015. p. 1–8. 链接1
[ 8 ] Yamauchi B. A frontier-based approach for autonomous exploration. In: Proceedings of 1997 IEEE International Symposium on Computational Intelligence in Robotics and Automation; 1997 Jul 10–11. Monterey, CA, USA. New York: IEEE; 1997. p. 146–51. 链接1
[ 9 ] Lee K, Doh NL, Chung WK. An exploration strategy using sonar sensors in corridor environments. Intell Serv Robot 2010;3(2):89–98. 链接1
[10] Ryu H, Chung WK. Local map-based exploration for mobile robots. Intell Serv Robot 2013;6(4):199–209. 链接1
[11] Keidar M, Kaminka GA. Efficient frontier detection for robot exploration. Int J of Rob Res 2014;32(2):215–36. 链接1
[12] Cieslewski T, Kaufmann E, Scaramuzza D. Rapid exploration with multi-rotors: a frontier selection method for high speed flight. In: Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent robots and Systems; 2017 Sep 24–28. Vancouver, Canada. New York: IEEE; 2017. p. 2135–42. 链接1
[13] Carrillo H, Dames P, Kumar V, Castellanos JA. Autonomous robotic exploration using occupancy grid maps and graph SLAM based on Shannon and Renyi Entropy. In: Proceedings of the 2015 IEEE International Conference on Robotics and Automation; 2015 May 26–30; Seattle, WA, USA. New York: IEEE; 2015. p. 487–94. 链接1
[14] Lauri M, Ritala R. Planning for robotic exploration based forward simulation. Robot Auton Syst 2016;83:15–31. 链接1
[15] Bai S, Wang J, Chen F, Englot B. Information-theoretic exploration Bayesian optimization. In: Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems; 2016 Oct 9–14; Daejeon, Korea. New York: IEEE; 2016. p. 1816–22. 链接1
[16] Shade R, Newman P. Choosing where to go: complete 3D exploration with stereo. In: Proceedings of the 2011 IEEE International Conference on Robotics and Automation; 2011 Sep 9–13; Shanghai, China. New York: IEEE; 2011. p. 2806–11. 链接1
[17] Yu N, Wang S, Xu C. RGB-D based autonomous exploration mapping of a mobile robot in unknown indoor environment. ROBOT 2017;39(6):860–71. 链接1
[18] Umari H, Mukhopadhyay S. Autonomous robotic exploration and on multiple rapidly-exploring randomized trees. In: Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots Systems; 2017 Sep 24–28; Vancouver, Canada. New York: IEEE; 2017. p. 1396–402. 链接1
[19] Vallvé J, Andrade-Cetto J. Potential information fields for mobile t exploration. Robot Auton Syst 2015;69(205):68–79. 链接1
[20] Henry P, Krainin M, Herbst E, Ren X, Fox D. RGB-D mapping: using depth cameras for dense 3D modeling of indoor environments. In: Proceedings of the 12th International Symposium on Experimental Robotics; 2010 Dec 18–21; New Delhi, India. Berlin: Springer; 2010. p. 22–5. 链接1
[21] Engelhard N, Endres F, Hess J, Sturm J, Burgard W. Realtime 3D visual SLAM with a hand-held RGB-D camera. In: Proceedings of the RGB-D Workshop on 3D Perception in Robotics at the Euro Robotics Forum. Sweden: Vasteras; 2011. p. 1–5. 链接1
[22] Klein G, Murray D. Parallel tracking and mapping for small AR workspaces. In: Proceedings of the 6th IEEE and ACM International Symposium Mixed and Augmented Reality; 2017 Nov 13–16; Nara, Japan. Berlin: Springer; 2007. p. 225–34. 链接1
[23] Labbé M, Michaud F. Online global loop closure detection large-scale multisession graph-based SLAM. In: Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems; 2014 Sep 14–18; Chicago, IL, USA. Berlin: Springer; 2014. p. 2661–6. 链接1
[24] Yu N, Li Y, Xu C, Liu J. Localization and motion planning and control of mobile robots with RGB-D SLAM. J Syst Sci Math Sci 2015;35(7):838–47. 链接1
[25] Yang S, Yi X, Wang Z, Wang Y, Yang X. Visual SLAM using Multiple RGB-D cameras. In: Proceedings of the 2015 IEEE International Conference on Robotics and Biomimetics; 2015 Dec 6–9; Zhuhai, China. Berlin: Springer; 2015. p. 1389–95. 链接1
[26] Chow JC, Lichti DD, Hol JD, Bellusci G, Luinge H. IMU and multiple RGB-D camera fusion for assisting indoor stop-and-go 3D terrestrial laser scanning. Robotics 2014;3(3):247–80. 链接1
[27] Munaro M, Basso F, Menegatti E. Openptrack: Open source multi-camera calibration and people tracking for RGB-D camera networks. Robot Auton Syst 2016;75:525–38. 链接1
[28] Huang C, Yang T. Line detecting and tracking of a mobile robot with multiple RGB-D cameras. In: Proceedings of the 2016 IEEE 13th International Conference on Networking, Sensing, and Control; 2016 Apr 28–30; Mexico City, Mexico. Berlin: Springer; 2015. p. 1–4. 链接1
[29] Grisetti G, Grzonka S, Stachniss C, Pfa P, Burgard W. Efficient estimation of accurate maximum likelihood maps in 3D. In: Proceedings of the 2007 IEEE/ RSJ International Conference on Intelligent Robots and Systems; 2007 Oct 29– Nov 2; San Diego, CA, USA. Berlin: Springer; 2007. p. 3472–8. 链接1
[30] Rusu RB. Semantic 3D object maps for everyday manipulation in human living environments. Könstliche Intelligenz 2010;24(4):345–8. 链接1
[31] Sarbolandi H, Leoch D, Kolb A. Kinect range sensing: Structured-light versus time-of-flight Kinect. Comput Vis Image Underst 2015;139:1–20. 链接1
[32] Thrun S, Burgard W, Fox D. Probabilistic robotics. Commun ACM 2002;45 (3):52–7. 链接1
[33] Khoshelham K, Elberink SO. Accuracy and resolution of Kinect depth data for indoor mapping applications. Sensors 2012;12(2):1437–54. 链接1
[34] Faion F, Friedberger S, Zea A, Hanebeck UD. Intelligent sensor-scheduling for multi-Kinect-tracking. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems; 2012 Oct 7–12; Vilamoura, Portugal. New York: IEEE; 2012. p. 3993–9. 链接1
[35] Fox D, Burgard W, Thrun S. The dynamic window approach to collision avoidance. IEEE Trans Robot Autom 1997;4(1):23–33. 链接1
[36] Zheng S, Zhang Q, Zheng R, Huang B, Song Y, Chen X. Combining a multi-agent system and communication middleware for smart home control: a universal control platform architecture. Sensors 2017;17(9):2135–59. 链接1
[37] Yu N, Wang K, Li Y, Xu C, Liu J. A haptic shared control algorithm for flexible human assistance to semi-autonomous robots. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems; 2015 Sep 28–Oct 2; Hamburg, Germany. Berlin: Springer; 2015. p. 5241–6. 链接1











 京公网安备 11010502051620号
京公网安备 11010502051620号




