
《1 前言》
1 前言
众所周知,新技术通常会让整个社会受益,尤其是国家的防御系统。世界上几乎所有国家都会投入大量资金进行突破性技术的研究与开发。美国国防部先进研究项目局(以下简称D且PA )是国防部下设的一个政府机关,该项目局会进行关键性的投资,旨在克服未来的多重威胁和挑战[1]。DARPA 最重要的成就是二十世纪对计算机网络的投资,与此同时,在许多并没有那么著名但是同样非常关键的发明上, DARPA 也做出了贡献。
自2004年以来, DARPA每几年举办一次大挑战赛。2004年的大挑战赛将无人驾驶车辆的自主驾驶技术作为比赛项目,当时只有2 辆参费车辆完成了最远距离11.78km该次比赛并无获胜者。随后2005 年举办的元人驾驶车辆太挑战赛成为最著名的比赛。2005 年的这场比赛要求参赛车辆在全长为212 km 的沙漠上通过狭窄的隧道、完成100 次以上的急转弯。该场比赛最具挑战性的部分是一段盘山路,盘山路的一边是垂直峭壁,另一边是岩壁,被称为啤酒瓶式通道。
在2005 年著名的大挑战赛的2 年后,即2007 年举办了城市挑战赛。该场比赛全程为96 km,全部在市区进行,这要比沙摸中的赛道更具挑战性。在这场城市挑战赛中,参赛成员第一次被分到两个赛道上去,赛道A 和赛道B。两队选手在同一个比赛中竞技,但是唯一的不同之处是赛道A 组每队已经得到DARPA 100 万美金的资助(赛道B 组的队没有资助)。前3 名的队伍将分别获得200 万美金、100 万美金和50 万美金。
在这三场大挑战赛之后,元人驾驶领域吸引了越来越多的注意。科技因为面临挑战而不断发展,例如,经过多年的连续发展,遥感和导航技术已经逐渐商业化。事实上,最著名的Google 无人驾驶车辆已经准备出售[2, 3]。与此同时,越来越多的汽幸生产商将更多功能整合到他们的车中,如自动泊车和巡航功能。还有一些研究聚焦于识别交通信号灯、行人和其他车辆的功能主[4-7]。通过这三场比赛,我们可以看出DARPA 举办的大挑战赛项目已经革新了人们对于驾驶的观念,并激发了在导航和自主驾驶领域的相关研究。此外,新科技的发展成果势必会让人们的生活和国家的防御系统受益。因此, DARPA 举办的每场大挑战赛都被视为未来研究领域的指南针。总之, DARPA 的大挑战赛项目的重要启示作用不仅表现在每场比赛关注的某个特定领域内,而是在整个科技领域。
《2 DARPA 机器人大挑战赛》
2 DARPA 机器人大挑战赛
2012 年, DARPA 宣布了一项新的、聚焦于仿人机器人的大挑战赛项目,称之为DARPA 机器人挑战赛( DRC)[8]。这是DARPA 大挑战赛在五年之内的第四场比赛。该场比赛的目标是提升当前最先进的仿人机器人。
《2.1 DARPA 机器人大挑战囊的背景》
2.1 DARPA 机器人大挑战囊的背景
2011 年,日本发生的东北大地震引发的海啸对福岛核电站造成了严重的损害。当核电站被海啸袭击的时候,六个核反应堆中的三个被熔毁。由于高辐射会对人类健康造成严重危害,抢险救援工作者无法进入到灾区内部。唯一的备选方案是将机器人送人灾区内部进行及时有效的响应,以将此类事故的影响降至最低。然而在当时,即便是最先进的仿人机器人,如日本本田公司的阿西莫机器人[9],也无能为力。其他轮式或履带式的机器人在核电站的复杂环境中的行动能力还是非常有限的。这一历史性事件反映出了推动机器人技术发展的急迫性,尤其是在仿人机器人方面,而这才是DARPA 确定比赛主题时的真正用意。
《2.2 为什么要选择仿人机器人?》
2.2 为什么要选择仿人机器人?
在历史进程中, DARPA 一直以来都在支持机器人学方面的研究,尤其是野外机器人。1981 年, DARPA 投资赞助俄亥俄州立大学研发了六足机器人自适应悬挂车辆(ASV) [10一12]。这种车辆设计主要针对杂乱地形的持续运动。因其尺寸和结构较大,所以并不适合在起初为人类创建的环境中运行。最近,一种叫做BigDog 的四足机器人在DARPA 的支持下研发,其目的是在复杂的地形中运载重物[13]。BigDog 的结构和运行非常可靠、稳健,并且已在军事中得到应用。虽然这种机器人的性能非常好,但是依然不适用于人类的环境。显而易见的是,这种结构和人类十分相似的仿人机器人更加适用于像福岛核电站这样的事故,因为这种环境在构建时已经考虑到人类的身材尺寸和结构了。不幸的是,在仿人机器人领域并没有研究出像ASV 或BigDog 这样适用于核电站熔毁这类恶劣环境的机器人。
在过去的三十年里,已经研发了多种仿人机器人,其中包括1986 年克莱姆森大学研发的CURBi [14], 2000年本田公司研发的阿西莫[15]以及2003 年索尼研发的QRIO[16]。这些机器人的研发主要是出于娱乐的目的。例如,阿西莫可以走路、跑步、爬楼梯甚至和人类交谈[9]。不幸的是,设计这些机器人的目的并不是想要代替人类在依照人类特征构建的环境中执行任务。然而, DARPA机器人大挑战赛要求仿人机器人能够代替人类在灾难环境中执行任务,如利用工具打破墙壁、爬上梯子、在复杂的地形中穿行等。因此, D且PA 机器人大挑战赛会对仿人机器人领域的研究产生非常重大的影响,促使其向现实和实用方向发展,而不是娱乐。对于这样一项极具挑战的任务,仿人机器人的设计必须更加创新和实用。在该项比赛之前,大多数的仿人机器人会应用电力促进器,因为这种电力促进器在运动控制方面具备非常可靠和准确的性能。然而,美国波士顿动力公司通过使用强大的液压系统作为制动器研发了新的仿人机器人,如Petman[17]和Atlas [18]。
《2.3 DARPA 机器人大挑战嚣的比要项目》
2.3 DARPA 机器人大挑战嚣的比要项目
该场比赛被分为预赛和决赛,时间为2012 年至2015年。与2007 年大挑战赛相似,只有6 个赛道A 组队伍是由DARPA 赞助,利用每队自行开发的机器人参加比赛。此外, 7 个赛道B/C 组队伍获得一个免费的Atlas 机器人,并用此机器人参加比赛。
为了模拟救援中遇到的潜在任务, 8 项任务具体为:车辆驾驶、崎岖地形、爬梯子、清理杂物、开门、打破墙壁、旋转阀门和安装水管。每完成一项任务得4 分,总分是32 分。每项任务的完成时间是45 min ,有1 次失败调整的机会。每项任务分3 个阶段,顺利完成1 个阶段得1 分,3 个阶段全完成奖励1 分,这样如果一项任务未经调整便顺利完成,便可得4 分。
在2013 年12 月举办的这场预赛中,图1 中的SCHAFT [19]队以27 分击败其他所有机器人队伍。赛后,这家公司被Google 公司收购了。决赛将在2015 年6 月进行,参加决赛的队伍中有11 支队伍是由D且PA 赞助的。图2 展示了决赛中的比赛项目。
《图1》
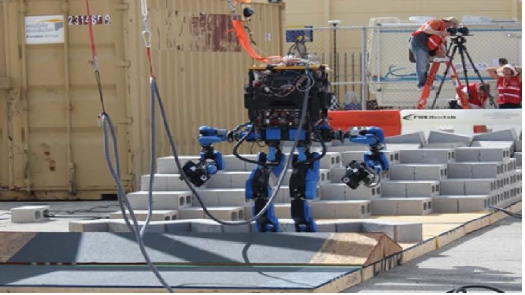
图1. 在复杂地形执行任务的SCHAFT 队机器人。
《图2》
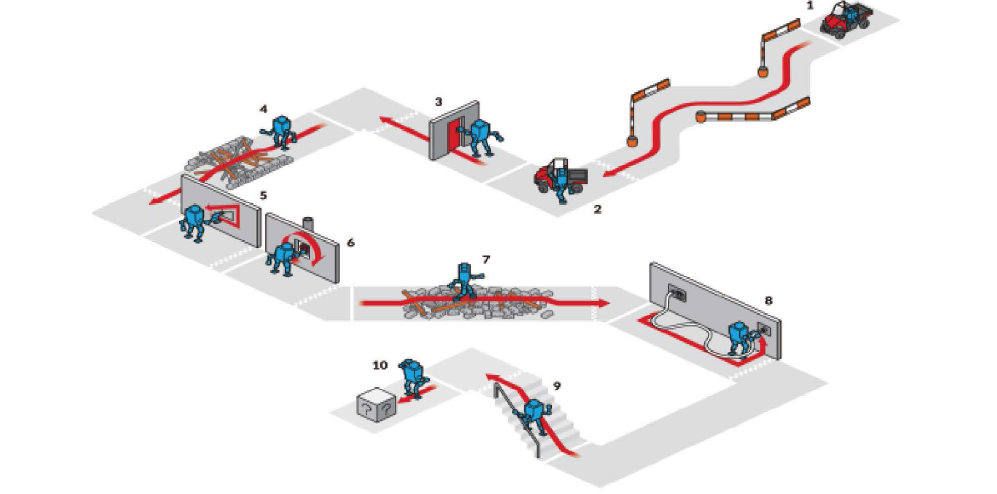
图2. 决囊中的8 个比赛项目。
在这8 个比赛项目中,打破墙壁和安装水管主要强调维持平衡时精准的手控操作。对于其他比赛项目来讲,在两足运动时保持稳定是主要挑战。有一些参赛选手设计了结构不同的机器人,如利用履带运动的CHIMP [20]和四足行走的RoboSimian [21]。这样设计的目的是为了避免两足运动时面临的挑战。其他参赛的机器人,像SCHAFT 和Atlas ,必须要保证自己无论在什么样的环境下都不能摔倒。因此,对于所有应用仿人结构的队伍来说,崎岖的地形是最严酷的挑战。作为DRC-HUBO 队伍中的一员,笔者负责崎岖地面行走这一部分。为了解决这些稳定性方面的挑战,笔者提出了一种名为滑雪式步态的新方法,这一新步态将会在下一节中详细描述。
《3 滑雪式步态的诞生》
3 滑雪式步态的诞生
一些参赛队伍专为比赛设计了新的机器人,但是笔者队伍一直致力于步态和算法设计,目的是为了让现有的平台可以完成比赛项目。在这一节中,笔者会对该平台以及滑雪式步态的研发做简要介绍。
《3.1 笔者队伍机器人简介》
3.1 笔者队伍机器人简介
笔者的仿人机器人平台是HUB02 ,它是一种由韩国先进科技学院( KAIST )研发的完全尺寸的仿人机器人。该机器人自由度为40、体重45 kg、身高1.25 m。每个踝关节都有两个力/力矩传感器,并且腰部有一个惯性测量装置(IMU)。2013 年夏,该机器人已更新了更加有力的发动机装置,并且进一步延长了其手臂以实现更好的手部操作,最终成果见图3 展示的DRC-HUBO 。
《图3》
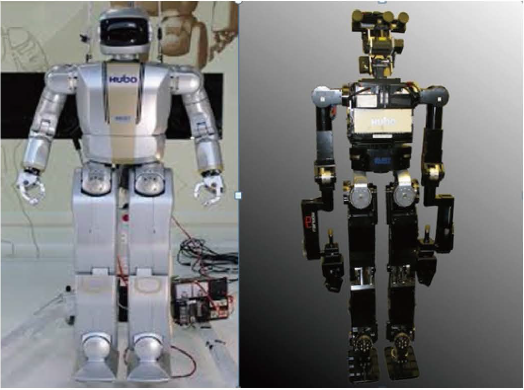
图3. HUBO2 (左)和DRC-HUBO (右)。
《3.2 在崎岖地形保持平衡的核心策略》
3.2 在崎岖地形保持平衡的核心策略
通过查阅文献,确定应用控制器保持仿人机器人的平衡是最常用的方法。这种方法基本上依靠对接触条件和机器人状态的感知优化配置。然而,在比较滑且易受力变形的崎岖地面,这种控制并不总是能呈现出令人满意的表现。为了提高仿人机器人的平衡能力,笔者提出了增大支撑面的策略。接下来会对多种可能实现该目标的方法进行讨论。
《3.3 增大脚踏板》
3.3 增大脚踏板
第一个尝试是增大脚踏板,因为这样会明显增大支撑面积。然而,这一策略的弊端数不胜数。首先,脚踏板的宽度不能大幅度地增大;否则,两只脚踏板会互相踩到,无法前进。因此,增加脚踏板的长度便是唯一选择。
不幸的是,延长脚踏板的长度后,走路时下肢关节的力矩就增加了。此外,由于脚踏板的长度增加,踩在障碍物上时会更容易发生碰撞,其中的空隙会非常危险,这一点对整个系统来说是非常严重的弊端。另一个弊端是更大的脚踏板会需要更大的着陆面积,这样会让立足空间的规划更加复杂。
基于上面的分析,放弃了增大脚踏板这一想法。笔者认为,即便支撑面积需要增加,也不应改变机器人的机械设计。因为多足机器人会比两足机器人的稳定性能更好,所以紧接着便尝试将仿人机器人变成四足运动模式。
《3.4 四足行走》
3.4 四足行走
两足行走时,迈步时的支撑面积只是一只脚踏板的面积,这样会限制其稳定性能。但是在四足行走的时候,每个步态周期会有多达三个地面支撑点。与增大脚踏板的方法相比,这种四足行走的方式更加有效地增大了地面的支撑面积。为了实现四足行走,有下面这两种可行的方法:前倾和后倾(图4 )。
《图4》

图4. HUBO2 四足前倾(左)和DRC-HUBO 四足后倾(右)。
在早期对HUBO2 进行的试验中,笔者试图让HUBO2 向后弯曲实现四足行走。当双腿笨重地完成折叠时,双臂便会触到地面。然而,折叠的双腿限制了运动能力。因此,笔者在双腿竖直的情况下将机器人的躯干向前倾,如图4 左图所示。但是较短的双臂还是无法触到地面[22]。此外,手部的精细结构并不允许手和地面有任何的接触。更不必说支撑身体。
对于DRC-HUBO 机器人来说,双臂可以延伸,并且笔者建议在该机器人的双手分别加上一个长钉,这样就可以在不损伤双手的情况下触碰地面。图4 右侧的图片展示的是对后倾四足行走的测试。在比较平坦的表面,这种四足行走表现得非常好,但是经过约20 min 的运行后,手臂上的大力矩就频繁地导致系统故障。此外,这种情况下机器人的躯干高度要远远低于两足行走的机器人,而且步伐间的空隙会受到限制。通过让机器人踩在木棍上进行测试,发现踩在20 cm 长的方杆上时,碰撞将不可避免。
正如上述尝试所展示的一样,进行四足行走的DRC-HUBO 机器人仍不能满足预期。与之前的想法相反,这次笔者提出通过其他工具协助走路而不是对机器人的机械设计进行永久性的改变。笔者选择滑雪式步态作为实现四足行走的方式。
《3.5 滑雪式步态》
3.5 滑雪式步态
在现实生活中,人们在爬山时通常会拿着登山杖协助自己的双腿。与之相似,老年人走路时会拿着手杖增加腿部力量。基于上述这些观察,想出了图5 所示的滑雪式步态。研究[23 26]显示可以将机器人发展成为协助走路的手杖(手杖机械人)。然而在实践中,于杖只是机器人手里握着的一根协助走路的普通拐杖,而不是一个机器人。
《图5》

图5. 滑雪式行走的概念。
为了实现滑雪式步态,机器人要拿着两根手杖,一于一支。考虑到机器人冗余的手臂和手关节,使用于杖接触地面是可行的,而且这样的步态就变成了四足行走。虽然因为发动装置的尺寸较小,腰部关节并不是非常有力,但是冗余允许将于臂关节的力矩分配出去,这样腰部关节力量小的局限性也可以接受了。在滑雪式步态中,手臂可以被视作是三连接的肢体,而腿则是两连接的模型(前腿和大腿)。因此,这种步态就成为了一种特殊的四足行走模式。而且,除了四足行走所具有的稳定性,这种步态还具备很多优点。
首先,仿人机器人需要完成很多手部操作任务。这就是说,像完成打破墙壁和安装水管的任务中那样,机器人的双手必须要握着完成任务所需的工具。因此,这就要求机器人在四足和两足的状态中不断转换。无论是前倾还是后倾的四足行走,从四足转换成两足站立通常需要消耗很大的能量。然而通过使用于杖,滑雪式步态可以轻易地转换,轻松实现双手的操作功能。如果需要完成手部操作任务,那只要将于杖扔掉就好,如果机器人需要穿过崎岖的地形,将于杖拾起即可。即便机器人的一只手进行于部操作时,另一只手还可以继续握着手杖,这样还可以获得一些稳定性。
滑雪式步态的另一优势是双手可以随意握住手杖的任何地方。握住的手杖位置不同,有效手杖长度就不同,这就等于改变机器人“腿部”结构。这种灵活性就使得机器人可以灵活地转变成不同结构布局以应对不同的情况。一个例子就是重心( COM )的高度。对于比较长的手杖,重心较高,机器人离地面较高。另一方面,如果手杖的长度比较短,那么机器人的重心就会比较低,这样虽然离地面很近,但是稳定性比较好。
从上面的讨论可以得出这样的结论:滑雪式步态是应对复杂地形时一种简单、有效的解决办法,几乎不用对机器人的初始结构做任何改变,为机器人提供了更好的灵活性和稳定性。
《4 滑雪式步态的稳定性分析》
4 滑雪式步态的稳定性分析
在探求可能的方式来增加支撑面积后,又提出滑雪式的步态。在这一节笔者以稳定度裕量为标准,模拟并分析了该步态的稳定性。机器人模型是建立在HUBO2 机器人的基础上的。
《4.1 模型假设》
4.1 模型假设
在滑雪式步态中由于冗余,存在大量可用于设计腿部以及手部运动的配置。然而,基于对HUB02 机器人的体验以及人类演绎滑雪式步态的实验,为了稳定性分析笔者模拟了选定步态的俯视图,如图6 所示。
《图6》
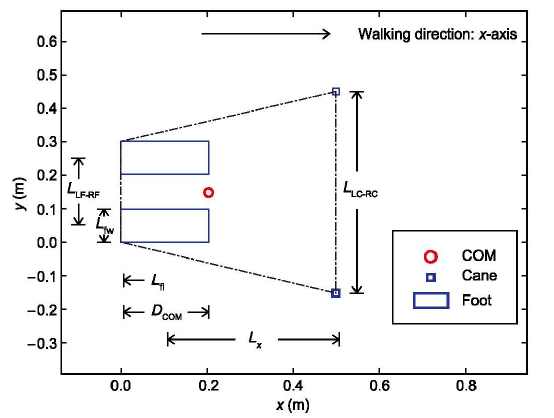
图6. 滑雪式模拟顶视图。
在该配置中,笔者把重心置于脚踏板最前沿,这是为了让重心向支撑区域后方移动的过程中脚踏板始终保持初始姿态。其目的是让腿部比于杖承受更多的重量,因为腿部比手杖更有力量。这样的安排能避免对于杖的潜在伤害。
另一个需要考虑的因素是重心转移的顺序。传统四足行走在于杖与腿部间并无显著差异,肢体一且向前摆动重心就会前移[27]。在滑雪式步态中,将重心置于靠近脚部的位置。如果重心在手杖运动时移动,另一条支撑臂的受力/力矩将会显著增加,从而导致于杖的损坏甚至破碎。因此只有在腿部运动时重心才会移动。这样的考虑会带来另一好处。考虑到固体碰撞,于杖装备了检测地形的传感器,由于在此过程中重心并未移动,因而摔倒的风险会降低。此外,笔者假设在步态过程中并未产生重心侧移。两足运动的过程中重心侧移从而维持落地腿的支撑,与之相比手杖的增加使得支撑面积增大,因此这一假设是合理的。避免侧移也有助于减少机器人的能量消耗。
《4.2 步进l顺序选择》
4.2 步进l顺序选择
步进顺序是滑雪式步态中另一个有待确定的因素。由于笔者提议演绎准静态行走,步态必须是如爬行般的缓慢地行进。如果手杖运动后同一边的腿部相继运动,这种步态被称为“爬行-1 ”。如果是另一边的腿部运动,则被称为“爬行-2”[28]。为了确定这两种步态哪一种更好,笔者计算了他们在相同初始结构以及步长下步态周期中的最低稳定度裕量。(Smin)。如图6 所示,以下是影响稳定性的参数:
Lfw :脚踏板的宽度;
Lfl :脚踏板的长度;
LLF-RF: y 轴方向两脚踏板中心间的长度;
LLc-Rc: y 轴方向于杖末端间的长度;
DCOM: x 轴方向在初始姿势时重心与手杖末端间的长度(根据重心位置的假设, DCOM= Lfl)
Lx,: x 轴方向于杖末端与脚踏板中心间的长度;
Lstep:步长。
由于“爬行-1 ”与“爬行-2”左右对称,支撑面积与重心位置只显示半个周期。为了获取数值结果,变量需要被赋予值。基于HUB02 机器人的机械尺寸,设Lfw=0.1m,Lfl=0.2 m [29]。基于人类利用于杖行走的实验,可知手杖可以伸出多远,手杖可以分开多宽以及步长是多少。其次,基于HUBO2 机器人的高度,设以下参数为滑雪式步态的标称值LLC-RC= 0.6 m,DCOM= 0.2 m,Lx = 0.4 m,Lstep= 0.2m。
图7 显示了“爬行-1 ”右手移动后右脚摆动时的重心与支撑多边形。图8 显示了“爬行-2”右手移动后左脚摆动时的重心与支撑多边形。命名手杖末端形成的支撑边缘为"TT线" ,以及手部末端与腿部形成的右边边缘为“TFR 线”,以助于的描述。通过检查重心与支撑面积,推断TT 线的改变并不会影响稳定度裕量,因为重心的位置距离手杖极远。然而, TFR 线距离重心很近,这意味着TFR 线是影响稳定性最重要的因素。
《图7》

图7. “爬行-1”滑雪式步态。
《图8》
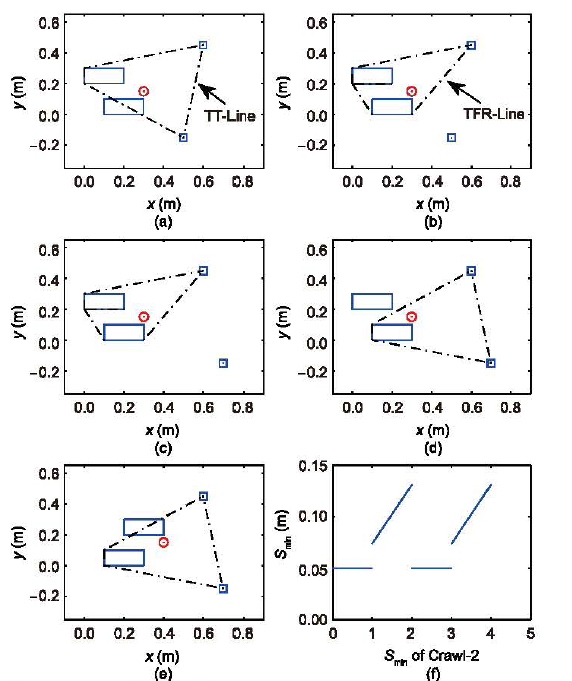
图8. “爬行-2”滑雪式步态。
在关于Smin的两张图表中(图7(f)、图8(f),当手杖与脚踏板摆动时,看到有明显的波动。这些波动是支撑多边形形状突变的结果。在“爬行-1 ”与“爬行-2”中,当右臂向前摆动时,稳定度裕量达到最低值。这一结果与观察一致。笔者观察到四F 线在“爬行-1 ””中更倾斜。因此,“爬行-1 ”中的支撑多边形导致了更低的稳定度裕量。
通过这一分析, “爬行-2”的步进顺序优于“爬行-1 ”的步进顺序。“爬行-2”的步进顺序可以得出更大的Smin.,从而为机器人提供更好的稳定性。这一结论与文献[27]中提到的最佳步进顺序不同。在最佳步进顺序中手杖被当作腿部, 4 个部位的接触被当作点接触。而本文的仿人机器人的脚部是脚踏板,只有手杖末端视作点。因此,笔者推断在目前的配置下“爬行-2”的步进顺序对于滑雪式步态是更好的选择。
《5 滑雪式步态的受力/力矩分析》
5 滑雪式步态的受力/力矩分析
在这一节中,笔者将分析滑雪式步态的受力/力矩分布。根据速度与立足点位置,合适的行走模式多种多样。因此,笔者演绎了一个基于初始姿态的综合分析。由于初始姿态的对称性,忽略受力/力矩在x 轴方向的分量。图9 显示了受力/力矩分析的建模。从点O到点E 之间的点分别代表了躁关节、膝关节、髓关节、肩关节、肘关节以及腕关节。点F是手杖末端与地面的接触点。这样就形成了一个闭环系统。
《5.1 脚踏板接触模型》
5.1 脚踏板接触模型
接触条件有三种:具有摩擦的硬点接触[30],软指接触以及刚性接触[31]。具有摩擦的硬点接触表示仅存在1 个垂直于接触面的反作用力和两个摩擦力,而不存在力矩。软指接触和刚性接触会产生1 个或者3 个力矩,相应地会产生3 个力。在实验中选择硬点接触模型作为脚踏板接触模型。为了使描述更清晰,笔者引人了一个有效的接触点P,如图9 所示。图10 显示了脚踏板用硬点接触模型表示的放大视图。由于有效的接触点P 可以处于脚踏板周围任意位置,点P 与脚踏板尾部之间的距离应小于或等于脚踏板长度。为了确保稳定性,点P 需要地形的支撑。
《图9》

图9. 受力/力矩分析中的变量。
《图10》

图10. 脚踏板的硬点接触模型。
《5.2 分析受力/力矩分布的参数》
5.2 分析受力/力矩分布的参数
根据图9 与图10 ,在初始姿态下受力/力矩分布的参数如下:
 髋关节的位置;
髋关节的位置;
 :躯干链接与z 轴正方向之间的角度;
:躯干链接与z 轴正方向之间的角度;
 轴方向手杖未端与脚踏板中心之间的长度;
轴方向手杖未端与脚踏板中心之间的长度;
 手杖长度;
手杖长度;
 轴方向踝关节与有效接触点P 之间的距离;
轴方向踝关节与有效接触点P 之间的距离;
 :手杖末端的接触力;
:手杖末端的接触力;
 脚踏板上有效接触点P 的接触力;
脚踏板上有效接触点P 的接触力;
 静摩擦系数;
静摩擦系数;
 系统总质量;
系统总质量;
 重力加速度。
重力加速度。
根据主文所述,参数 会极大地影响滑雪式步态的有效运动模式,从而导致不同的稳态性能。在受力/力矩分布分析中,这些参数同样是重要的变量。剩余参数
会极大地影响滑雪式步态的有效运动模式,从而导致不同的稳态性能。在受力/力矩分布分析中,这些参数同样是重要的变量。剩余参数 被用来描述受力/力矩分布的解。
被用来描述受力/力矩分布的解。
在分析之前最后一个关键点是链接的物理值。为了与之前研究保持一致,每一个链接的质量与长度以及关节力矩限度将会基于笔者实验室中的HUBO2 仿人机器人。
《5.3 关节力矩的确定》
5.3 关节力矩的确定
对于闭链系统,由于冗余,关节力矩的解并不唯一。在初始姿态,有以下方程式:

这一方程式的解与点P位置元关。因此,如果力对 是个变量,关节力矩会相应发生改变。为了普遍性,会以mg 标度并用比值表示。
是个变量,关节力矩会相应发生改变。为了普遍性,会以mg 标度并用比值表示。 的最小值为0 是因为接触点在没有镀链的情况下无法提供向下的施力点。比值的上限设为1 是因为脚踏板也没有安上镜链。此外,力对必须遵循摩擦约束。概括起来:
的最小值为0 是因为接触点在没有镀链的情况下无法提供向下的施力点。比值的上限设为1 是因为脚踏板也没有安上镜链。此外,力对必须遵循摩擦约束。概括起来:

另一个约束是点P 必须位于脚踏板之内,因此 同时每一个得到的关节力矩必须在限度之内,因为关节力短是基于系统方程式中的。为了获得最优解,我们选择将需要的力矩总数降到最低。根据图9 中的姿态,当手杖力量为
同时每一个得到的关节力矩必须在限度之内,因为关节力短是基于系统方程式中的。为了获得最优解,我们选择将需要的力矩总数降到最低。根据图9 中的姿态,当手杖力量为 以及μ= 0.6总力矩最小,相应的关节力矩也在限度之内。
以及μ= 0.6总力矩最小,相应的关节力矩也在限度之内。
《6 滑雪式步态的实施》
6 滑雪式步态的实施
在崎岖地形任务的初始,机器人需要跨越几根木棒。为了避免与这些障碍物发生碰撞,我们需要一个固定的步长。我们的滑雪式步态有3 个接触点,然而由于步态的运动学约束,跨步限制了可行的步长。因为手杖长度的变化直接影响了运动构造,需要根据可行的步长来确定手杖长度。因此,需要同时考虑脚与手杖未端的轨道。考虑到位移与速度的平滑度,假设它们的运动方程是正弦曲线方程。可以得到以下公式:

式( 3 )中, Hmax是跨一步的最大上升高度, T代表了跨一步所需时间, z 代表脚踏板或手杖末端的高度。此外,为了确定离地净高,假设脚踏板是水平的。这个正弦轨道模式在HUBO2 模型中同样适用。
《6.1 手杖长度选择中的变量》
6.1 手杖长度选择中的变量
图9 定义并显示了构建滑雪式步态中受力/力矩分析的参数。在这个部分同样会用到 并引人
并引人 来决定髋部位置。由于大腿与小腿的长度相等,髋关节总是高于踝关节。总而言之,笔者用以下参数来确定步长以及相应的手杖长度,如图11 所示。
来决定髋部位置。由于大腿与小腿的长度相等,髋关节总是高于踝关节。总而言之,笔者用以下参数来确定步长以及相应的手杖长度,如图11 所示。
《图11》

图11. 手杖设计中的变量.
《6.2 手杖长度与步长之间的关系》
6.2 手杖长度与步长之间的关系
为了确定滑雪式步态的有效步长,笔者引人了逆运动学求解器来计算各关节值。臂长与步态一旦确定,逆运动学求解器可以提供跨一步期间的各关节值。如果各关节值都在限度之内,则相应的步长就适用于该臂长。根据HUBO2 机器人的尺寸,关节限度设定为:
踝关节: 0° 至 88°;
膝关节: 0° 至160°;
髋关节: 0° 至 88°;
肩关节:-90° 至90° ;
肘关节: 0° 至170° 。
为了确定每一个臂长相应的步长范围,制定了一些变量。设 且
且 。对每一个固定的臂长,步长增加,运动轨道依照式(3)。最大步长根据相应的臂长计算。同时核对3 种不同情况下两者的关系,躁关节值分别为20°, 30。和40° ,图12 显示了计算结果,以下是观察结果:
。对每一个固定的臂长,步长增加,运动轨道依照式(3)。最大步长根据相应的臂长计算。同时核对3 种不同情况下两者的关系,躁关节值分别为20°, 30。和40° ,图12 显示了计算结果,以下是观察结果:
• 当 重心高度增大,
重心高度增大,  的合理范围向右移动,这意味着机器人需要更长的手杖来行走。
的合理范围向右移动,这意味着机器人需要更长的手杖来行走。
• 当 降低时,最大可行步长变小。此外,当 时曲线趋于平缓。这种平缓是在重心位置相对高以及
时曲线趋于平缓。这种平缓是在重心位置相对高以及 足够大的条件下产生的。之前假设于杖垂直触碰地面。然而,由于设计的机械局限性,HUBO2 机器人的手杖较短,肘关节元法向后弯曲。因此臂长一旦超过0.80m,则
足够大的条件下产生的。之前假设于杖垂直触碰地面。然而,由于设计的机械局限性,HUBO2 机器人的手杖较短,肘关节元法向后弯曲。因此臂长一旦超过0.80m,则 无法增加。
无法增加。
• 每个曲线的最右端出现了急剧下滑。这一下滑的原因是在这些范围内,肘关节在初始姿势时严重弯曲。因此,手杖会因为受到了肘关节的限制,而无法举到对应正弦曲线的高度。
基于图12 的结果,笔者选择 ,其原因如下。首先,当
,其原因如下。首先,当 改变时,高度和
改变时,高度和 的有效范围会相应发生变化。
的有效范围会相应发生变化。 值为0.75 m 可以确保在的三种取值下获得大步长。其次,0.75m 的高度与躯干高度相近,使得HUBO2 机器人安装的手杖处于合适的状态。
值为0.75 m 可以确保在的三种取值下获得大步长。其次,0.75m 的高度与躯干高度相近,使得HUBO2 机器人安装的手杖处于合适的状态。
《图12》

图12. 三种情况下和之间的关系。
《7 模拟与实验》
7 模拟与实验
为了验证滑雪式步态设计,笔者使用OpenRAVE 模拟器进行模拟。它是由卡耐基梅隆大学机器人研究所的罗森迪安科夫开发的机器人模拟器。基于OpenRAVE,德雷塞尔大学的罗伯特·艾伦贝格开发了模拟补克包来处理HUBO2 机器人模型[32]。该模拟器包含物理动力引擎;因此,模拟结果接近真实机器人操作。图13 显示了模拟期间的快照,其中HUBO2 机器人演绎了“爬行-2”滑雪式步态。基于臂长设计的结果,笔者在机器人手上加了两个长度为0.75m 的手杖。
《图13》

图13. OpenRAVE 平坦地面HUBO2 滑雪式步态模拟。
模拟结束后,笔者在草地上进行了试验。草地的柔软与滑度形成了崎岖地形的条件。因此草地可以对两足以及滑雪式步态的稳态性能进行理想的测试。在分析中,笔者假设滑雪式步态中不存在侧移。然而在实验过程中,我们发现增加侧移可以减少摆动腿一侧的手杖力矩,从而由于躯干受限制而降低系统故障的可能性。因此,为了有更充分的比较,笔者同样在滑雪式步态中引人了两足行走中的侧移。
图14 显示了两足以及滑雪式步态的实验结果。在两足行走过程中,重心左右移动以保持行走时的平衡。当HUBO2 机器人右移的同时左脚在空中摆动时,右脚踏板下的草地由于压力受到了挤压,脚踏板向右倾斜。因此,实际的重心位置与重心参照位置不同,使得smin 变得更小。因为运动是个开放回路,重心误差不可避免,而且HUBO2 机器人会摆向另一边。结果,重心的摆动会随着机器人的行走发生左右振动,正如图14 所示。在跨了3 步之后,机器人由于重心的摆动摔倒了。
《图14》
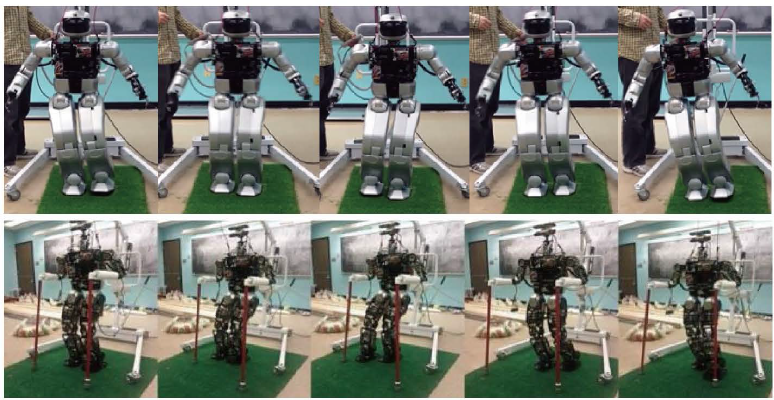
图14. HUBO2 在草地上的双足步态和滑雪式步态。
另一方面,在滑雪式步态过程中,支撑面积不仅仅由脚踏板组成。因为于杖末端与脚踏板的交替使用,支撑面积变得更大。当机器人右移,由于草地的变形, Smin仍然在下降,但滑雪式步态提供了更大的smin 来确保稳定性。此外,三个支撑点构成了一个三角形,从而防止了摆动的增加。另外,三角形共享的重量使脚踏板产生更少的草地变形,重心干扰也比两足步态少。这些实验结果证实了滑雪式步态比两足步态更稳定。
在2013 年12 月的机器人大挑战赛的预赛上,经笔者改善的DRC-HUBO机器人因为伸展臂而变得更强大。由于地形环境表面是坚实平坦的,为了快速且成功通过上下坡道,笔者采用了两足行走方式,如图15 所示。然而,机器人在曲折的跨栏前就摔倒了,用完了第二次尝试所需的时间[33]。
《图15》
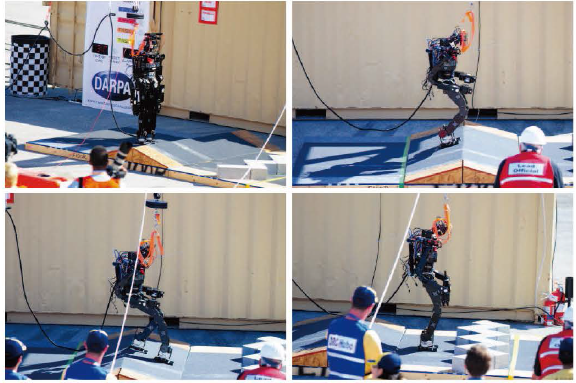
图15. DRC 预赛申DRC-HUBO 在崎岖地形完成任务。
《8 结论与进一步的研究》
8 结论与进一步的研究
面对机器人大挑战赛中的崎岖地形挑战,笔者为仿人机器人开发了滑雪式步态。相比两足步态,该步态确保了更大的支撑面积,并且由于手杖不同的安装位置改变了整个身体的姿态,该步态相比四足行走更具灵活性。在滑雪式步态的稳定性分析中笔者以稳定度裕量为标准,在相同的配置下比较了两种不同的步进顺序“爬行-1 ”与“爬行-2”,之后在初始姿态下进行了受力/力矩分析。对于闭环系统,由于冗余关节力矩的解的不唯一性,笔者选择通过最小化力矩来得出一个固定的解。
此外,通过设计臂长,笔者在HUBO2 机器人的基础上实施了滑雪式步态。由于臂长决定了运动构造,从而进一步影响了运动能力,笔者使用最大步长来跨过木棒障碍,从而确定了臂长。模拟与试验结果证实滑雪式步态在平地与草地上能保持平稳。在今后的研究中,笔者将分析在整个步行周期中的受力/力矩分布来研究关节力矩的特点,接着将从总体上考虑稳定性、能量消耗以及运动能力,来研究为不同参数选择不同值的策略。
《Compliance with ethics guidelines》
Compliance with ethics guidelines
Hongfei Wang, Shimeng Li, and Yuan F. Zheng declare that they have no conflict of interest or financial conflicts to disclose.











 京公网安备 11010502051620号
京公网安备 11010502051620号




