


《1 引言》
1 引言
高温目标(800~1500K)检测与识别在火灾监控领域具有重要意义。基于视频图像,利用阈值分割法识别高温目标,需满足2个条件:
1)高温目标信号强度大于传感器响应阈值,即Gobj>Gmin(Gobj代表高温目标信号强度,Gmin代表传感器响应阈值)。
2)高温目标信号强度大于背景(常温物体)信号强度,即Gobj>Gsce(Gsce代表背景信号强度)。
条件1是识别的先决条件,目标信号检测不到,则识别无从谈起。条件2,反映了信号处理中的信噪比概念。若将高温目标看作“信号”,背景看作“噪声”,则可定义信噪比M为
M = Gobj/Gsce (1)
从而条件2也可表述为M>1。显然,信噪比M的数值越大,越有利于图像识别的进行。在无照明条件下,条件1,2容易实现。但在照明条件下,由于背景对照明的反射,使得背景和高温目标的信号强度几乎相当。因此,在照明条件下,如何识别出高温目标,是论文要解决的问题。
《2 成像过程的数学建模:光谱辐射亮度与光敏面信号强度关系的建立》
2 成像过程的数学建模:光谱辐射亮度与光敏面信号强度关系的建立
在图1所示的光学成像系统中,S表示成像物体表面某一微元,其光谱辐射亮度为L(λ),且表面法线与成像系统的光轴平行;S'为相应像元。由成像的几何关系、照度平方反比定律、朗伯余弦定律及比尔定律,可推得像元S'的光谱辐射照度1(x)为[1],
\(I(\lambda)=\frac{\pi V \times \cos ^{4} \theta}{4(f / d)^{2} \times(1+m / p)^{2}} \times \\ \exp \left(\frac{-k u}{\cos \theta}\right) \times \tau(\lambda) \times L(\lambda)\) (2)
《图1》

图1 光学成像系统示意图
Fig.1 Schematic sketch of optical imaging system
其中,\(\tau(\lambda )\)为成像系统光线透过率,f为焦距,d为透镜有效孔径,p为非对称镜头光孔放大率,m为放大率,k为被测物体和测量仪器之间存在的气体(或半透明的液体及固体)介质之吸收特性,u为物距,V为透镜渐晕系数,θ为物像主光线与透镜光轴之夹角。
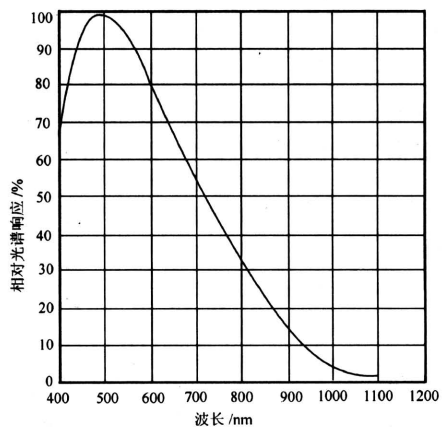
结合CCD的光谱响应函数Tccd(λ)(如图2所示)及曝光时间Δt,并考虑到V,θ,f,d,m,p,k等为与波长无关的几何光学参数,以及透过率函数\(\tau(\lambda )\)接收的是具有一定宽度的波段辐射能量,可做常数\(\tau\)处理,可得CCD光敏面信号强度与成像物体的光谱辐射亮度之间的关系为
\(G=\frac{\exp \left(\frac{-k u}{\cos \theta}\right) \times \tau(\lambda) \times L(\lambda)}{4(f / d)^{2} \times(1+m / p)^{2}} \times \exp \left(\frac{-k u}{\cos \theta}\right) \times \\ \tau \times \int_{\lambda_{1}}^{\lambda_{2}} T_{\mathrm{ccd}}(\lambda) \times L(\lambda) \mathrm{d} \lambda\) (3)
式中λ1,λ2分别表示CCD工作波段的波长下限及上限。
《图2》

图2 CCD相对光谱响应曲线[2]
Fig.2 Relative spectral response of CCD[2]
若高温目标的物距为uobj,物像主光线与透镜光轴之夹角为θobj,则目标信号强度为
\(G_{\mathrm{obj}}=\frac{\pi \times \Delta t \times V \times \cos ^{4} \theta}{4(f / d)^{2} \times(1+m / p)^{2}} \times \\ \exp \left(\frac{-k u_{\mathrm{obj}}}{\cos \theta_{\mathrm{obj}}}\right) \times \tau \times \int_{\lambda_{1}}^{\lambda_{2}} T_{\mathrm{ccd}}(\lambda) \times L_{\mathrm{obj}}(\lambda) \mathrm{d} \lambda\) (4)
相应的背景信号强度Gsce可表示为
\(G_{\mathrm{sce}}=\frac{\pi \times \Delta t \times V \times \cos ^{4} \theta_{\mathrm{sce}}}{4(f / d)^{2} \times(1+m / p)^{2}} \times\\ \exp \left(\frac{-k u_{\mathrm{sec}}}{\cos \theta_{\mathrm{sce}}}\right) \times \tau \times \int_{\lambda_{1}}^{\lambda_{2}} T_{\mathrm{ccd}}(\lambda) \times L_{\mathrm{sce}}(\lambda) \mathrm{d} \lambda\) (5)
式(4),式(5)分别给出了目标与背景的信号强度之数学表达式。
《3 信噪对比度M的表达及其影响因素分析》
3 信噪对比度M的表达及其影响因素分析
式(4),式(5)代入式(1),可得
\(M=\left(\frac{\cos \theta_{\mathrm{obj}}}{\cos \theta_{\mathrm{sce}}}\right)^{4} \times\\ \exp \left[\frac{-k\left(u_{\mathrm{ob}} \cos \theta_{\mathrm{sce}}-u_{\text {sce }} \cos \theta_{\mathrm{obj}}\right)}{\cos \theta_{\mathrm{obj}} \cos \theta_{\mathrm{sce}}}\right] \times\\ \frac{\int_{\lambda_{1}}^{\lambda_{2}} T_{\text {ced }}(\lambda) \times L_{\mathrm{obj}}(\lambda) \mathrm{d} \lambda}{\int_{\lambda_{1}}^{\lambda_{2}} T_{\mathrm{ccd}}(\lambda) \times L_{\text {sce }}(\lambda) \mathrm{d} \lambda}\\\) (6)
式(6)给出了信噪比M的数学表述。综合式(4)至式(6)分析可知,参数V,Δt,f,m,p,d仅对信号强度的绝对量有影响。影响对比度M的因素只有空间方位因子u,θ;CCD响应函数Tccd(λ);光谱辐射功率 Lobj(λ),Lsce(λ)。
《3.1 空间方位因子》
3.1 空间方位因子
当监视器的位置及观察角度确定后,空间方位因子u,θ由成像物体的空间位置决定,用参数K来表示它们的综合效应,即为
\(K=\left(\frac{\cos \theta_{\mathrm{obj}}}{\cos \theta_{\mathrm{sce}}}\right)^{4} \times\\ \exp \left[\frac{-k\left(u_{\mathrm{obj}} \cos \theta_{\mathrm{sce}}-u_{\mathrm{sce}} \cos \theta_{\mathrm{obj}}\right)}{\cos \theta_{\mathrm{obj}} \cos \theta_{\mathrm{sce}}}\right]\\\) (7)
《3.2 CCD的光谱响应特性》
3.2 CCD的光谱响应特性
对于一般的黑白CCD,光谱响应曲线如图2所示。其工作波段为400~1200nm,对可见光及近红外均有响应。
《3.3 成像物体的光谱辐射特性》
3.3 成像物体的光谱辐射特性
对高温目标,其光谱辐射既有自身发射,又有照明之反射辐射,在不影响甄别效果的情况下,作者仅考虑高温目标的自身辐射。视其为温度Tobj的Planck 热辐射体,且光谱发射率为与波长无关的常数,则[3]
\(L_{\mathrm{obj}}(\lambda)=\varepsilon_{\mathrm{obj}} \times \frac{C_{1} / \pi}{\lambda^{5}\left[\exp \left(C_{2} / \lambda T_{\mathrm{obj}}\right)-1\right]}\\\) (8)
式中C1,C2表示Planck 第一、第二常数;εobj表示高温目标的发射率。
对背景物体,因其处于常温状态(约为300K),自身辐射可以忽略,主要是照明的反射辐射。设照明光源是温度为T,的Planck热辐射体,并且将光线传输空间的光学特性和背景物体的光谱反射率视为常数,则背景反射光谱依然保持照明光源的光谱成份。于是被CCD摄取的景物之辐射为照明光源辐射乘以衰减系数D,及反射率Psce,
\(L_{\text {sce }}(\lambda)=\rho_{\text {sce }} D_{\mathrm{s}} \times \frac{C_{1}}{\lambda^{5}\left[\exp \left(C_{2} / \lambda T_{\mathrm{s}}\right)-1\right]}\) (9)
式将至式(9)三代入式(6),得
\(M=K \frac{\varepsilon_{\mathrm{obj}}}{\rho_{\mathrm{scc}} D_{\mathrm{s}}} \times\\ \frac{\int_{\lambda_{1}}^{\lambda_{2}} T_{\mathrm{ccd}}(\lambda) \times \frac{1}{\lambda_{\lambda_{1}}^{5}\left[\exp \left(C_{2} / \lambda T_{\mathrm{obj}}\right)-1\right]} \mathrm{d} \lambda}{\int_{\mathrm{ced}}^{\lambda_{2}}(\lambda) \times \frac{1}{\lambda^{5}\left[\exp \left(C_{2} / \lambda T_{\mathrm{s}}\right)-1\right]} \mathrm{d} \lambda}\\\) (10)
从式(10)可知,目标发射率的增加,背景物体的反射率减小及照明衰减的加剧都将使信噪比增强。但是这些参数,对于特定的拍摄场景来说,都为常数,我们无法对其进行调整。
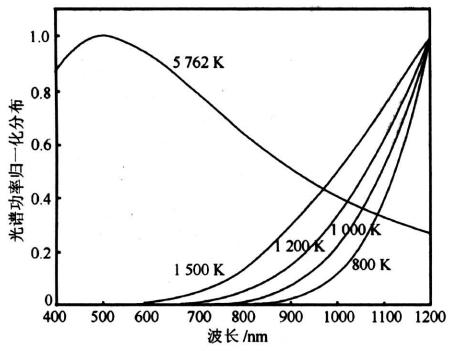
若太阳作为照明光源(Ts=5762K),辐射衰减系数Ds=2.1644x10-5(白昼亮度),则高温目标(800~1500K)与衰减后的太阳照明辐射的相对光谱功率分布曲线如图3所示。
《图3 》

图3 高温目标与衰减后的太阳照明辐射之相对光谱功率分布曲线
Fig.3 Normalized spectral distribution curves of the high-temperature targets and the attenuated sun light
从图3可以看出,高温目标光谱功率 Lobj与背景光谱功率L在整个CCD响应波段[400~1200]nm都有能量分布,但是前者集中于较长波段(近红外波段),后者集中于较短波段(可见光波段)。
《4 增强信噪比M的方案》
4 增强信噪比M的方案
根据对CCD的光谱响应特性及成像物体光谱辐射特性的分析,作者推测,利用滤光片改变进入CCD的影像之光谱成份,使CCD的有效响应区间由全工作波段变为近红外波段(长波段),则可能有助于提高信噪比M。但这只是直观的推测,尚需对此进行严格的理论证明。
《4.1 理论证明》
4.1 理论证明
在理论分析之前,对将要用到的几个数学符号予以说明。
M([λ1,λ2])代表对全工作波段[λ1,λ2]响应时的信噪比,由式(10)定义。M([λm,λ2])为长波段[λm,λ2]响应时的信噪比,M([λ1,λ])为对短波段[λ1,λm]响应时的信噪比,分别由式(11),式(12)定义:
\(M\left(\left[\lambda_{m}, \lambda_{2}\right]\right)=K \frac{\varepsilon_{\text {obj }}}{\rho_{\mathrm{sce}} D_{\mathrm{s}}} \times\\ \frac{\int_{\lambda_{m}}^{\lambda_{2}} T_{\mathrm{ccd}}(\lambda) \times E_{\mathrm{b}}\left(\lambda, T_{\mathrm{obj}}\right) \mathrm{d} \lambda}{\int_{\lambda_{m}}^{\lambda_{2}} T_{\mathrm{ccd}}(\lambda) \times E_{\mathrm{b}}\left(\lambda, T_{\mathrm{s}}\right) \mathrm{d} \lambda}\\\) (11)
\(M\left(\left[\lambda_{1}, \lambda_{m}\right]\right)=K \frac{\varepsilon_{\mathrm{obj}}}{\rho_{\mathrm{sce}} D_{\mathrm{s}}} \times\\ \frac{\int_{\lambda_{1}}^{\lambda_{m}} T_{\text {ced }}(\lambda) \times E_{\mathrm{b}}\left(\lambda, T_{\text {obj }}\right) \mathrm{d} \lambda}{\int_{\lambda_{1}}^{\lambda_{m}} T_{\mathrm{ccd}}(\lambda) \times E_{\mathrm{b}}\left(\lambda, T_{\mathrm{s}}\right) \mathrm{d} \lambda}\\\) (12)
式中
\(E_{\mathrm{b}}\left(\lambda, T_{\mathrm{obj}}\right)=\frac{1}{\lambda^{5}\left[\exp \left(C_{2} / \lambda T_{\mathrm{obj}}\right)-1\right]},\\ E_{\mathrm{b}}\left(\lambda, T_{\mathrm{s}}\right)=\frac{1}{\lambda^{5}\left[\exp \left(C_{2} / \lambda T_{\mathrm{s}}\right)-1\right]^{\circ}}\)
理论分析要解决如下2个问题
1)证明
M([λ1,λ2])<M([λm,λ2]) (13)
2)为使信噪比提高幅度最大,入m应取何值?
第一个命题的证明见附录。通过严格的理论分析,作者证明了M([λ1,λ2])<M([λm,λ2]),亦即,长波波段的选取有助于信噪比M的提高。
利用这一结果,我们继续选取[λm,λ2]的高通波段[λm1,λ2],根据上面的证明我们可得M([λm,λ2])<M([λm1,λ2])。类似处理直到入m趋于λ2
\(\begin{array}{c} M\left(\lambda_{m}, \lambda_{2}\right)<M\left(\lambda_{m 1}, \lambda_{2}\right)<\cdots \cdots< \\ M\left(\lambda_{m i}, \lambda_{2}\right)<\cdots \cdots<M\left(\lambda_{2}, \lambda_{2}\right) \end{array}\)
上式告诉我们入m越向λ2偏移,越有助于M值的提高,当入m无限逼近于λ2时,信噪比M取最大值。
从提高信噪比的角度来看,λ2-λm的值越小,越有利于M的提高。但是随着响应波段的缩短,必然会带来目标信号强度的衰减。为了使得目标信号强度大于CCD响应阈值,高通波段宽度不能过于窄。所以最佳波段的选择,应既有利于提高信噪比,又不至于信号强度的过度衰减。
λm的具体数值由下述计算给出。
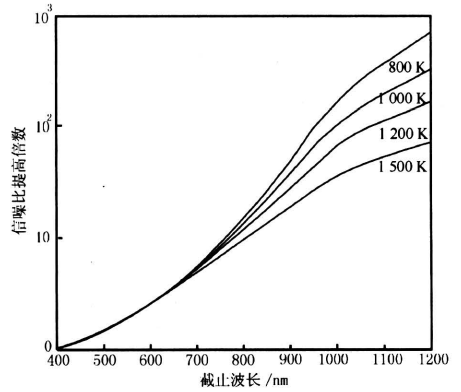
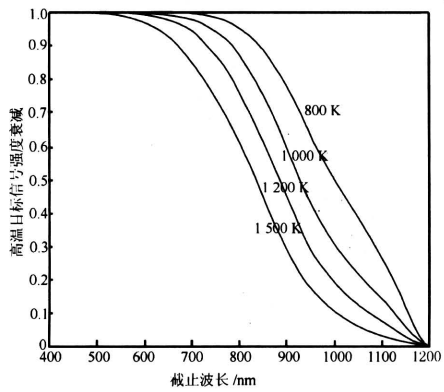
图4,图5给出在约定条件下的计算结果。从图4可以看出,利用波段选择的方法来提高信噪比,其效果是非常显著的。
《图4》

图4 信噪比M的提高
Fig.4 Enhancement of signal-noise-ratio
综合图4及图5,发现对处于温度区间为[800,1500]K的高温目标,当响应波段为[780~1200]nm,其信噪比较之于原响应波段[400~1200]nm,提高10倍;信号强度的衰减小于20%。从工程实用的角度,取λm为780nm。
《4.2 技术实现及辨识效果》
4.2 技术实现及辨识效果
理想的滤光片应当是对400~780nm波段的见光完全屏蔽,对780~1200nm的近红外光完全透过。但在实际操作中,很难找到这种理想的滤
光片,作者采用正模式PCTS(polymer stabilizedcholesteric texture)液晶光阀[4]来实现这一滤光功能。
《图5》

图5 高温目标信号强度的衰减
Fig.5 Attenuation of signal intensity
图6给出这种液晶光阀在亮、暗两种工作状态下的透过率曲线:亮态(加电压)时在[400~1 200]nm波段呈现“波长无选择性”,暗态(不加电压)时在[780~1200]nm波段表现为“高通”性质。
《图6》

图6 液晶光阀的光谱透过特性
Fig.6 The transmission spectrum curves of LCLV
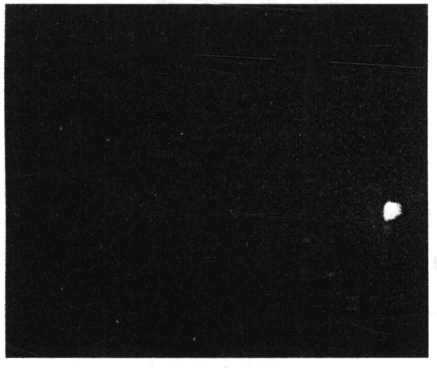
将这种液晶光阀放置在CCD镜头前面,构成所谓的液晶光阀型CCD。图7显示出液晶光阀型
《图7》

图7 亮态图像
Fig.7 Image taken under brightness state
CCD亮态时摄影效果(照明条件为正常日光,火焰温度为1173K),图8则是液晶光阀处于暗态时的摄影结果。图7反映的是对全工作波段[400~1200]nm响应的信噪比情况,图8反映的是仅对长波段[780~1200]nm响应的信噪比情况。显然,图8较之于图7目标与背景的对比度已显著提高,高温目标已从背景中凸显出来,充分验证了式(13)。
《图8》

图8 暗态图像
Fig.8 Image taken under darkness state
在实际应用中,通过对液晶光阀所加电压的灵活控制,可方便地得到亮、暗态图像,实现既能正常监视、又可对影像中高温目标实现实时甄别的双重功能。
《4 CCD像感元件的信号饱和问题》
4 CCD像感元件的信号饱和问题
以上讨论均建立在CCD像感元件线性工作的基础之上。注意到当影像(景物和高温目标)辐射过强时,像感元件会出现饱和现象。此时应通过对光圈及曝光时间的调整,使得影像信号强度处于CCD线性工作范围内。
《5 结论》
5 结论
在照明条件下,由于背景对照明的反射,使得背景的亮度和高温目标的亮度几乎相当。为了实现在此条件下对高温目标的识别,必须采取措施以提高目标与背景的信噪比。通过对成像过程的数学建模,建立了成像物体光谱辐射亮度与CCD光敏面信号强度的数学关系式,揭示了影响识别效果的各物理因素。通过对这些物理因素的分析,提出利用液晶光阀改变成像器件的响应波段,可有效提高信噪比,从而将高温目标方便地识别出来的方法。
该方法的优点在于,只需利用普通的黑白CCD摄像头,不需借助于专门的红外捕获设备,即可有效地检测出图像中的高温物体,并已在“火盗力克”火灾监控系统中得到成功的应用。
致谢:感谢符泰然在本文写作过程中的有益讨论。
附录:M([λ1,λ2])<M(λm,λ2)的证明
令
\(\begin{aligned} h(\lambda) &=\frac{T_{\mathrm{ccd}}(\lambda) \times E_{\mathrm{b}}\left(\lambda, T_{\mathrm{obj}}\right)}{T_{\mathrm{ccd}}(\lambda) \times E_{\mathrm{b}}\left(\lambda, T_{\mathrm{s}}\right)} \\ &=\frac{\exp \left(C_{2} / \lambda T_{\mathrm{s}}\right)-1}{\exp \left(C_{2} / \lambda T_{\mathrm{obj}}\right)-1} \quad(\mathrm{a}-1) \end{aligned}\)
则
\(\begin{array}{l} \int_{\lambda_{\mathrm{m}}}^{\lambda_{2}} T_{\mathrm{ccd}}(\lambda) \times E_{\mathrm{b}}\left(\lambda, T_{\mathrm{obj}}\right) \mathrm{d} \lambda= \\ \int_{\lambda_{m}}^{\lambda_{2}} h(\lambda) \times T_{\mathrm{ccd}}(\lambda) \times E_{\mathrm{b}}\left(\lambda, T_{\mathrm{s}}\right) \mathrm{d} \lambda \quad(\mathrm{a}-2) \end{array}\)
由积分中值定理 [5], 得
\(\begin{array}{l} \int_{\lambda_{m}}^{\lambda_{2}} T_{\mathrm{ccd}}(\lambda) \times E_{\mathrm{b}}\left(\lambda, T_{\mathrm{obj}} \mathrm{d} \lambda=\right. \\ h(\xi) \int_{\lambda_{1}}^{\lambda_{2}} T_{\mathrm{ccd}}(\lambda) \times E_{\mathrm{b}}\left(\lambda, T_{\mathrm{s}}\right) \mathrm{d} \lambda \quad(\mathrm{a}-3) \end{array}\)
从而有
\(\begin{array}{l} M\left(\left[\lambda_{m}, \lambda_{2}\right]\right)=K \frac{\varepsilon_{\mathrm{obj}}}{\rho_{\mathrm{sce}} D_{\mathrm{s}}} h(\xi)= \\ K \frac{\varepsilon_{\mathrm{obj}}}{\rho_{\mathrm{sce}} D_{\mathrm{s}}} \frac{\exp \left(C_{2} / \xi T_{\mathrm{s}}\right)-1}{\exp \left(C_{2} / \xi T_{\mathrm{obj}}\right)-1} \quad(\mathrm{a}-4) \end{array}\)
式中 \(\lambda_{m}<\xi<\lambda_{2} \) 。
同理,
\(M\left(\left[\lambda_{1}, \lambda_{m}\right]\right)=K \frac{\varepsilon_{\mathrm{obj}}}{\rho_{\mathrm{sce}} D_{\mathrm{s}}} h(\omega)=K= \frac{\varepsilon_{\mathrm{obj}}}{\rho_{\mathrm{sce}} D_{\mathrm{s}}} \frac{\exp \left(C_{2} / \omega T_{\mathrm{s}}\right)-1}{\exp \left(C_{2} / \omega T_{\mathrm{obj}}\right)-1}, \lambda_{1}<\omega<\lambda_{m} \quad(\mathrm{a}-5)\)
易证, 当\( \mathrm{T}_{s}>\mathrm{T}_{o b j} \)时, 函数\( h(\lambda) \)为\( \lambda \)的增函数。 又考虑有\( \omega<\xi \), 可得
\(M\left(\left[\lambda_{1}, \lambda_{m}\right]\right)<M\left(\left[\lambda_{m}, \lambda_{2}\right]\right) \quad(\mathrm{a}-6)\)
再来将部分波段积分和全波段积分进行比较。若
\(\begin{aligned} a &=\int_{\lambda_{1}}^{\lambda_{m}} T_{\mathrm{ccd}}(\lambda) \times E_{\mathrm{b}}\left(\lambda, T_{\mathrm{obj}}\right) \mathrm{d} \lambda, \\ b &=\int_{\lambda_{1}}^{\lambda_{m}} T_{\mathrm{ccd}}(\lambda) \times E_{\mathrm{b}}\left(\lambda, T_{\mathrm{s}}\right) \mathrm{d} \lambda, \\ c &=\int_{\lambda_{m}}^{\lambda_{2}} T_{\mathrm{ccd}}(\lambda) \times E_{\mathrm{b}}\left(\lambda, T_{\mathrm{obj}}\right) \mathrm{d} \lambda, \\ d &=\int_{\lambda_{m}}^{\lambda_{2}} T_{\mathrm{ccd}}(\lambda) \times E_{\mathrm{b}}\left(\lambda, T_{\mathrm{obj}}\right) \mathrm{d} \lambda, \end{aligned}\)
则
\(\begin{array}{l} a+c=\int_{\lambda_{1}}^{\lambda_{2}} T_{\mathrm{ccd}}(\lambda) \times E_{\mathrm{b}}\left(\lambda, T_{\mathrm{obj}}\right) \mathrm{d} \lambda, \\ b+d=\int_{\lambda_{1}}^{\lambda_{2}} T_{\mathrm{ccd}}(\lambda) \times E_{\mathrm{b}}\left(T, \lambda_{\mathrm{s}}\right) \mathrm{d} \lambda_{\circ} \end{array}\)
于是不等式 (a-6) 也可简写为
\(\frac{a}{c}<\frac{b}{c} \text { 。 }\)
再由数学定理 { }^{[5]} :
当 a / b<c / d 且 b, d 同号时, 有
\(\frac{a}{c}<\frac{a+b}{c+d}<\frac{b}{d} \text { 。 }\)
综上可得
\(\begin{array}{l} \frac{\int_{\lambda_{1}}^{\lambda_{\mathrm{m}}} T_{\mathrm{ccd}}(\lambda) E_{\mathrm{b}}\left(\lambda, T_{\mathrm{obj}}\right) \mathrm{d} \lambda}{\int_{\lambda_{1}}^{\lambda_{\mathrm{mo}}} T_{\mathrm{ccd}}(\lambda) E_{\mathrm{b}}\left(\lambda, T_{\mathrm{s}}\right) \mathrm{d} \lambda}< \\ \frac{\int_{\lambda_{1}}^{\lambda_{2}} T_{\mathrm{ccd}}(\lambda) E_{\mathrm{b}}\left(\lambda, T_{\mathrm{obj}}\right) \mathrm{d} \lambda}{\int_{\lambda_{1}}^{\lambda_{2}} T_{\mathrm{ccd}}(\lambda) E_{\mathrm{b}}\left(\lambda, T_{\mathrm{s}}\right) \mathrm{d} \lambda}< \\ \frac{\int_{\lambda_{\operatorname{mid}}}^{\lambda_{2}} T_{\mathrm{ccd}}(\lambda) E_{\mathrm{b}}\left(\lambda, T_{\mathrm{obj}}\right) \mathrm{d} \lambda}{\int_{\lambda_{\text {mid }}}^{\lambda_{2}} T_{\mathrm{ced}}(\lambda) E_{\mathrm{b}}\left(\lambda, T_{\mathrm{s}}\right) \mathrm{d} \lambda}, \end{array}\)
亦即
\(M\left(\left[\lambda_{1}, \lambda_{m}\right]\right)<M\left(\left[\lambda_{1}, \lambda_{2}\right]\right)<M\left(\left[\lambda_{m}, \lambda_{2}\right]\right),\)
证毕。











 京公网安备 11010502051620号
京公网安备 11010502051620号




