


《1 前言》
1 前言
歼击机环境控制系统 (environmental control system, ECS) 是机载系统的重要组成部分, 其作用是满足座舱和电子设备舱的供气、调温和调压要求, 保证飞机乘员与电子设备正常工作。现代歼击机航速高、机动性好, 环控系统工作条件更加多变和恶劣;环控系统结构复杂, 涉及的变量多且变量之间存在耦合, 给系统的精确控制带来了一定的困难。现阶段国内环控系统主要采用PID控制与脉宽调节, 但在使用中暴露出调节时间长、易产生供气温度波动等问题, 难以满足要求。模糊控制系统采用语言型控制规则, 不需要建立精确数学模型, 特别适合于复杂系统的模型
Matlab是一种面向科学与工程计算的高级语言, 广泛应用于自动控制和工业设计等领域。笔者使用该软件的Simulink工具箱和Fuzzy工具箱建立脉宽调节、PID控制、模糊控制、脉宽-模糊复合控制等4种控制规律下的系统模型, 并对它们的动态特性进行分析和比较。
《2 系统简介》
2 系统简介
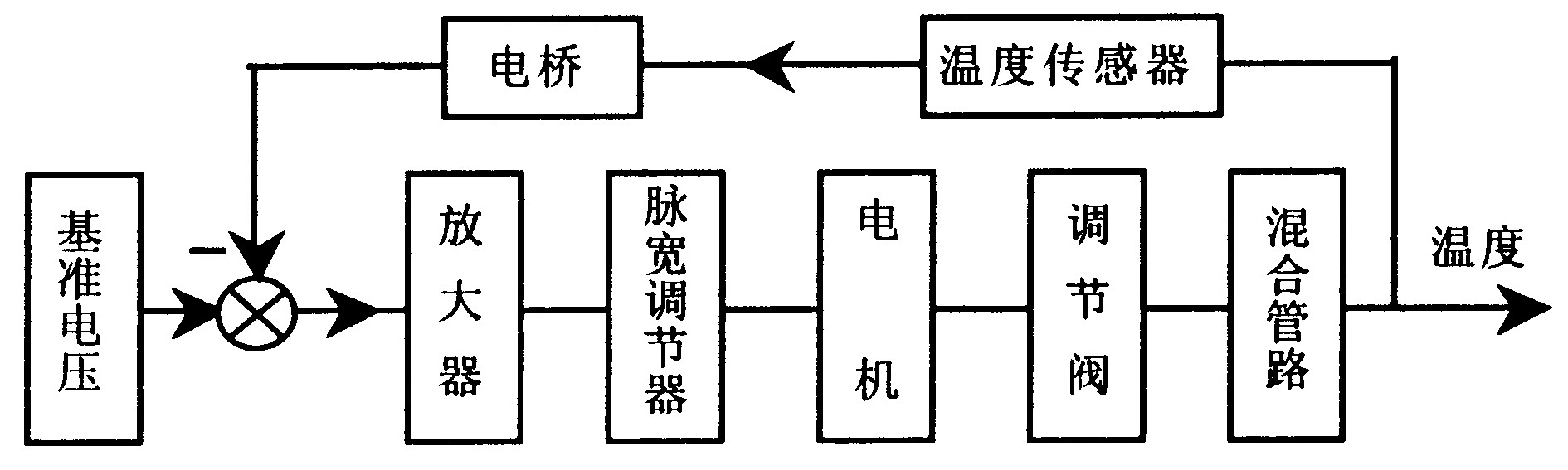
环控系统分为3个温度控制通道:预调温通道、防冰通道和供气调温通道, 气流依次经过3个通道, 逐级进行温度调节。通道内各控制环节构成反馈回路, 其结构如图1所示。在不同高度下各通道有不同的基准温度T0 (K) ;控制系统使用反馈控制, 通过调整冷、热路流量, 控制混合温度稳定在基准温度±4℃范围内。
《3 控制系统工作原理》
3 控制系统工作原理
《3.1PID控制系统》
3.1PID控制系统
在PID系统中需要设定PID系数Kp, KI, KD, 它们作为输入量、积分项、微分项的加权系数, 调节输出的控制信号。
《3.2脉宽调节系统》
3.2脉宽调节系统
系统中温度测量信号T与基准值T0相比较得出温度偏差信号e=T-T0 (K) 。传感器将信号e反馈至脉宽调节器, 当|e|≥4℃时, 系统开始调节;当|e|≥10℃时, 控制阀门连续转动;当偏差值介于两者之间时, 阀门转速W (r/min) 与温差呈线性关系, 如图2所示, 图中W0 (r/min) 为阀门最高转速。该系统调节迅速, 但稳态精度不高。
《3.3模糊控制系统》
3.3模糊控制系统
模糊系统中采用二维建模, 即以温度偏差e及其变化率
《3.4复合控制》
3.4复合控制
系统由预调温通道直接从飞机发动机引气, 引入的气流温度变化剧烈, 该通道只对温度进行初调, 因此出口温度的精度不高;后两个通道则情况相反, 故考虑采用混合控制方案, 即预调温采用脉宽调节, 后两个调温通道采用模糊控制。
《4 模糊控制系统设计》
4 模糊控制系统设计
《4.1输入和输出》
4.1输入和输出
输入:e, 取值范围为[-6, 6], 对应实际论域为[-6, 6];
输出:u, 无量纲, 取值范围为[-8, 8], 对应实际论域为[-5, 5]。
对3个信号的模糊集合都采用均匀量化, 隶属度函数均采用三角形函数。3个信号的模糊子集都分为7级:
《4.2规则库》
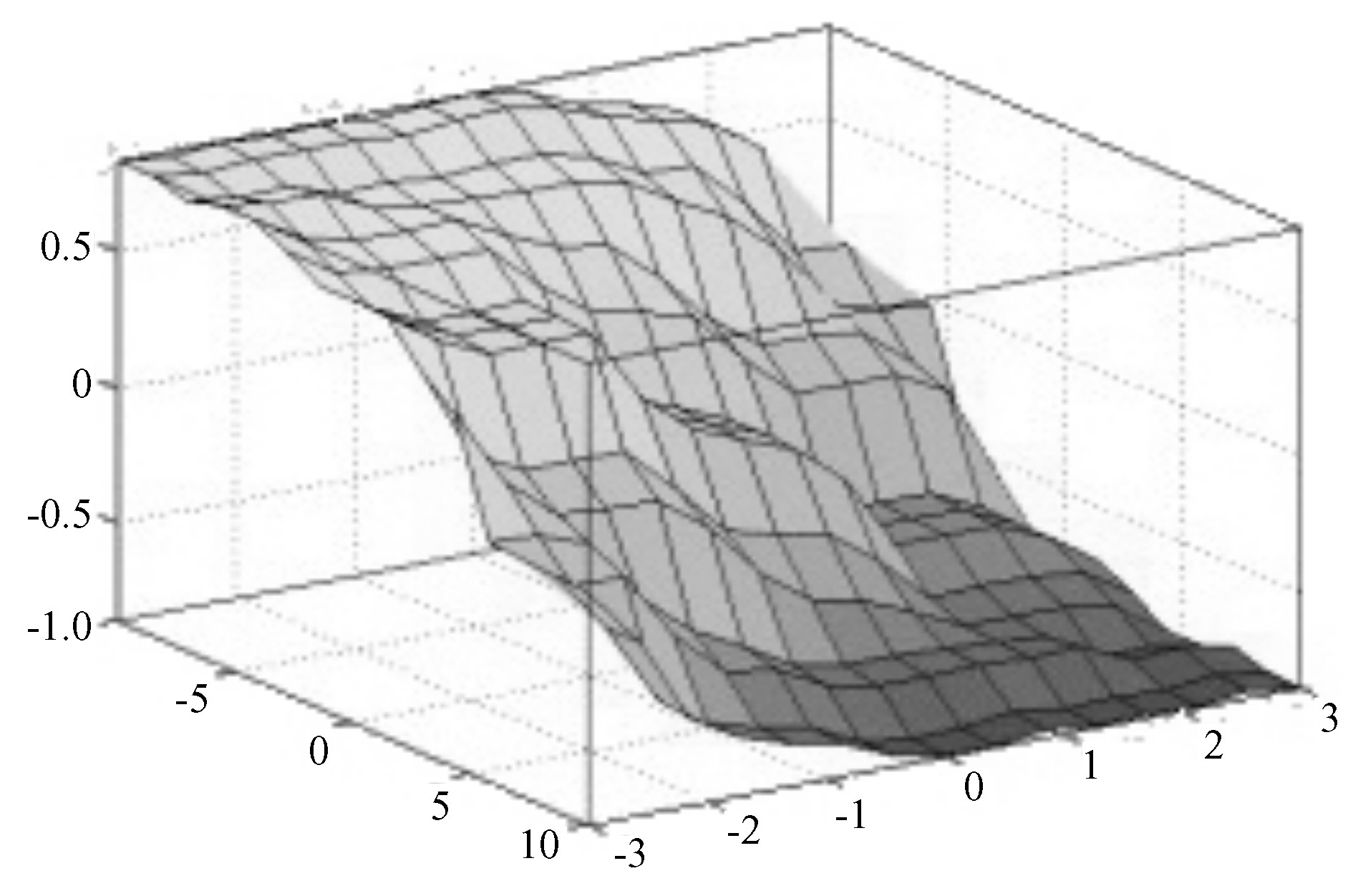
4.2规则库
模糊控制规则是由以往的控制规律总结出的一组输入-输出对应关系。图3为GUI工具提供的模糊对应曲面图。
《5 动态特性比较》
5 动态特性比较
笔者针对不同的温度阶跃输入和动态数据输入, 比较了不同控制系统的动态特性。
《5.1温度阶跃输入》
5.1温度阶跃输入
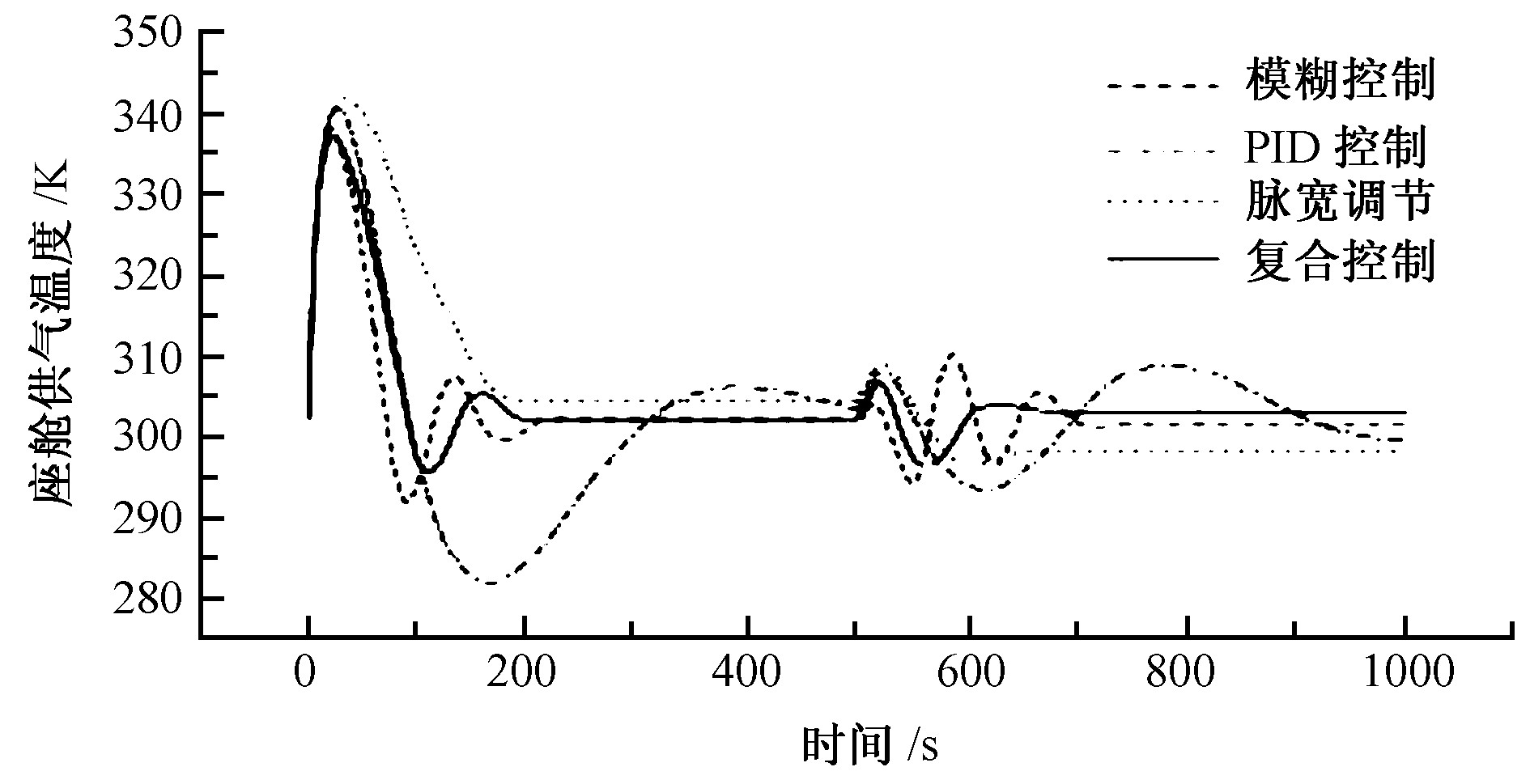
输入状态点:飞行高度为1 000 m, Ma=0.2;500 s时热路温度由664 K阶跃上升到744 K;冷路流量为1 200 kg/h;冷热路其他参数由高度和马赫数计算得出。该高度下座舱供气温度应稳定在302±4 K。各控制系统的仿真曲线如图4所示。
从图4可以看出:
1) 脉宽调节调节速度快, 稳定时间短, 但控制精度较低, 只能将温度控制在误差范围内 (多为上限或下限) 。
2) PID控制连续, 稳态误差小, 但调节时间长。
3) 模糊控制调节迅速, 稳定时间短, 稳态精度高, 控制性能优于PID系统和脉宽调节系统。
4) 复合控制系统超调量小, 稳态精度高, 同时其调节时间比模糊控制短, 在4个备选方案中控制性能最优。
脉宽调节属于一种范围控制, 可将被控量控制在一定范围内, 所以不适于精确温度控制, 而适用于控制输入变化大, 同时对输出量精度要求不高的系统。PID系统使用范围广, 但PID系数对系统依赖性强, 一旦系统状态发生变化, 控制性能会受到很大影响。模糊控制是一种效果控制, 它避开了复杂的建模环节, 直接着眼于系统输入对输出的影响。模糊控制系统的输入可以包括偏差值及其对时间的一阶导数, 有的系统还包括二阶导数。当输入信号对输出产生不利影响 (如导致温度偏离设定温度) 时, 模糊控制器会输出控制量, 控制系统向相反方向变化;当输入信号对输出影响不大时, 输出的控制量也会相应减小, 适用于工况变化较大的系统。从比较结果来看, 复合控制的性能最好。
《5.2动态数据输入》
5.2动态数据输入
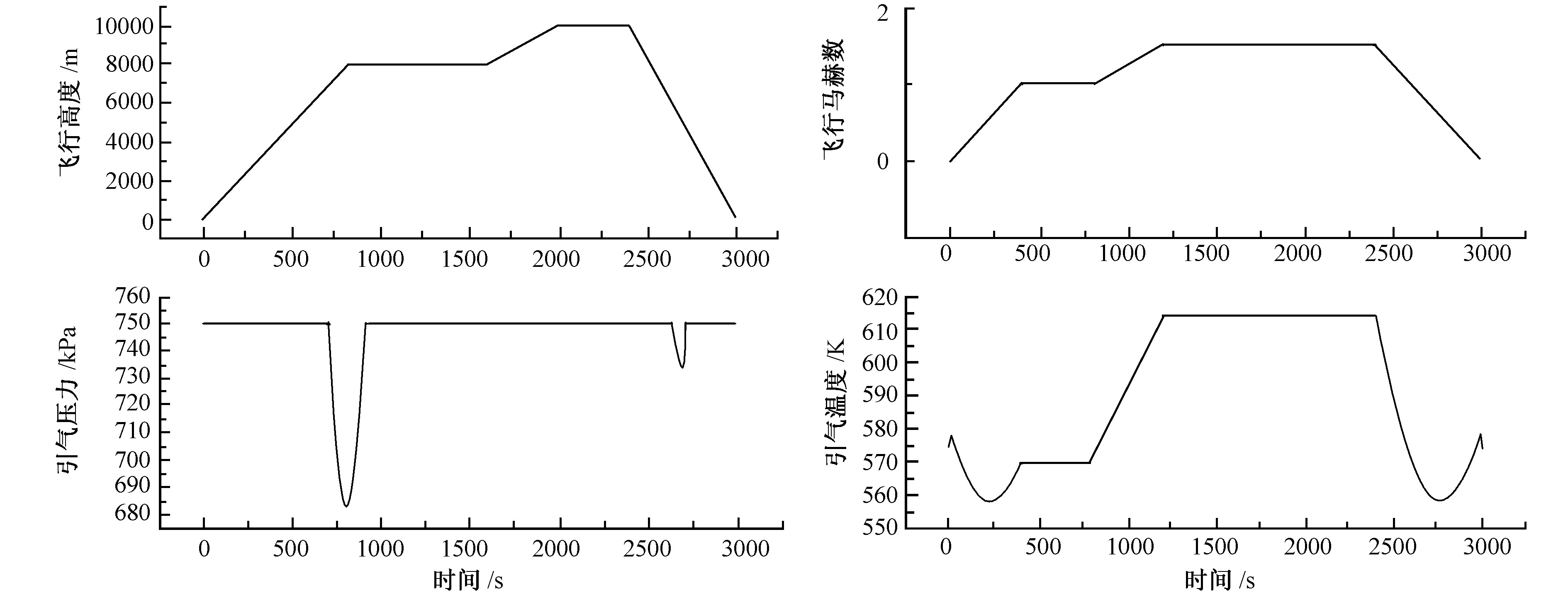
动态输入更接近于系统的实际工况, 因此, 有必要对其进行比较和分析。图5为输入的飞行高度、马赫数、环控系统引气温度和压力。在2 500 s左右, 飞行高度由高到低跨越8 000 m高度, 座舱基准温度相应地由277 K阶跃至302 K。这里主要比较了脉宽调节系统和复合控制系统的性能。
图6和图7分别为动态输入下2个系统供气流量和供气温度曲线。在500 s前系统计算值的波动是由设定初值引起的, 稳定后曲线变化才反映系统的性能。
从图6、图7可以看出, 脉宽调节系统在约500~3 000 s时段内, 温度和流量有明显的波动。而整个过程的温度一直处于基准温度±4 ℃。这说明脉宽调节系统工作正常, 但控制精度不高, 被控量有明显波动。复合控制则相对平稳, 只是在跨越8 000 m高度时, 由于基准温度发生阶跃变化, 使温度和流量有所波动, 但很快恢复平稳。
笔者分析, 由于脉宽是范围调节的, 在基准温度为±4 ℃时, 系统不输出控制信号, 一旦系统外部存在扰动, 就会引起温度在该范围内上下波动。在系统对温度进行调节的过程中, 系统各个阀门角度不断变化。由于涡轮处于两个阀门之间, 阀门角度变化造成涡轮前压和背压随之波动, 导致供气流量产生振荡;这种流量振荡又会与温度的波动相耦合, 造成整个系统控制性能下降。
复合控制系统由于引入了模糊控制, 提高了系统对于温度信号变化的预测和处理能力, 有效抑制了温度信号的波动, 从根本上解决了温度波动的问题。
《6 结论》
6 结论
通过仿真建模模拟了脉宽调节系统的工作情况, 找到了温度和流量信号产生波动的原因, 提出了采用复合控制的解决方案。该方案综合了脉宽调节系统和模糊控制系统的优点, 建模简单、反应迅速、控制精度高, 性能优于PID控制系统和脉宽调节系统;该控制方案有效解决了现有脉宽系统供气温度和供气流量产生波动的问题, 适用于对歼击机环境控制系统进行控制。











 京公网安备 11010502051620号
京公网安备 11010502051620号




