
《1 前言》
1 前言
三峡航道素以高山峡谷多、河段弯、雾多阴湿、日照时间短等为主要特点,航标是其最重要的助航设施之一。自三峡大坝建设以来,为进一步改善航道条件,提高航标正常工作的保证率,交通部实施了三峡库区航路改革航道配套建设工程,对库区大坝至鳊鱼溪近 230 盏航标进行了遥测监控。
在三峡库区进行航标遥测监控的难点可归纳为以下 3 点。
1)如何可靠地在终端和监控中心之间双向传输数据。可靠通信是系统运行的基本条件,如何保证无线数据传输网络的可靠和稳定是系统的关键,无法传输或丢失等将影响整个系统的可用性。
2)如何提高浮标的定位精度。库区航标以岸标和浮标为主,浮标多设置在水流湍急、水下地形复杂(有礁石等碍航物)的重点航道上,航道较窄,一般在 50 m 左右。由于水流、潮汐的影响,加上锚链回转半径的原因,浮标的实际位置有时与设计位置相差几十米,浮标所提供的错误信息会影响过往船只的正常航行和避让,甚至会引起船舶的搁浅和触礁。因此,浮标的准确定位在这些航道中是非常重要的,一般要达到  3 m。
3 m。
3)如何降低终端的功耗,提高系统的可靠性。库区航标主要由蓄电池供电,白天由太阳能充电,但库区日照时间短。航标维护规范要求配置的蓄电池能量要保证 30 天以上,且阴雨天航标能正常工作。因此,航标终端 RTU(remote terminal unit)的功耗应尽可能低。
《2 系统设计》
2 系统设计
《2.1 工作原理》
2.1 工作原理
系统如图 1 所示,RTU 安装于岸标、浮标或巡标船,由单片机、GPS、无线通信和传感器等组成,采集浮标的位置、灯器工作参数,并根据设定的阈值主动判断航标工作是否正常。当设定的时间到并接到中心指令或出现报警时,航标数据将通过无线通信发送到监控中心。
《图1》

图1 系统构架
Fig.1 System architecture
航标数据通过无线网络传送到中心的通信服务器,由其对收到的数据进行判别,通过航道局内部局域网将监测数据发送到数据服务器入库。
各级监控中心的管理人员根据授予的权限监控各自辖区的航标,采用电子航道图操作和查询航标的状态、管理数据库以及实现远程设置、远程遥控功能,报警信息还能按照事先设定的值班人员手机号码发送警示通知。
《2.2 网络拓扑》
2.2 网络拓扑
系统的网络结构如图 2 所示。三峡库区航标遥测监控系统采用长江通信导航局的通信线路,分别在长江宜昌航道局、三峡通航管理局建立一级监控中心,各中心独立设置通信服务器、数据库服务器、电子航道图工作站以及大屏幕显示系统。在长江宜昌航道局的巴东、秭归航道站设立二级监控中心(或称分中心),配置服务器、监控工作站,通过长江通信导航局的通信线路与一级监控中心联网。远程或移动用户通过 GIS 客户端软件查询航标遥测监控信息。
《图2》

图2 系统网络结构图
Fig.2 Diagram of system net
《3 几个关键问题》
3 几个关键问题
《3.1 通信方案[1]》
3.1 通信方案[1]
三峡航道地理条件复杂,无线电传输条件相差甚远,全球移动通信系统(GSM)、甚高频通信系统(VHF)等多种方式各有利弊。如 GSM 方式具有频率利用率高、覆盖面大、系统容量大且初期投资与维护费用低等优点,但由于其短信的存储转发机制,所以会影响通信时效,并存在通信盲点等问题。长江沿岸已建设了 42 个 VHF 通信基站及相应的辅助设施,并在船岸通信方面得到成熟的应用,具有很好的通信实时性和应用基础,但 VHF 数传电台耗电大(电压为9 ~12 V,电流 1 ~2 A),长江通信导航局建设的船岸对讲系统要求船用电台功率最小为 5 W,这个功率对于航标供电系统而言太大。
鉴于三峡航道航标维护工作具有点多线长、工况环境复杂各异,防盗、防碰难度大等特点,全面采用专网建设投资大且实施困难,在建成后还需要安排足够的力量进行维护,反而增加了航道基层单位的维护工作。采用公共网络则可充分利用公共资源,减少重复建设,这也符合基础设施的社会化服务和标准化服务趋势。根据实地测试,目前公网信号如 GPRS/GSM,CDMA(码分多址)等已覆盖了长江干线航道的绝大部分区域,信号质量也能满足航标遥测监控的要求。就航标监测而言,每次发送与接收的数据不过数十字节,短信服务的 140 字节已可满足数据传输要求,且短信的滞后性所造成的时差对航标一般标位的监测也基本无碍。因此,选用中国移动 GPRS/GSM 网络作为数据传输的首选方案。
《3.2 数据交换平台》
3.2 数据交换平台
数据服务器和电子航道图构成了监控中心的两个重要部分,其中数据服务器可完成航标数据的管理、维护和数据备份恢复模块,具备通信费用和流量统计等功能[2]。电子航道图是本系统的重要部分,属于长江航道数字化建设的一个重要组成部分,不仅是航标动态的显示和管理平台,还是一个多重应用体系,具备电子导航、船舶自动识别、水上交通管理、航道维护指挥调度以及航道演变分析等功能。目前,国际上均采用 IHO(国际海道测量组织)颁布的标准 S -52,S -57 为数据交换和显示标准。其中,S -57 标准主要是针对海上而制定的,经过多年的发展,已经非常成熟。S -57 电子海图主要致力于海洋开发,而电子航道图在表达流域特征的同时还需关注更多的陆上目标,因此 S -57 标准中已有描述的目标不能满足内河航道图的需要。
采用长江航道局编著的《长江三峡库区船舶航行参考图》(以下简称《航参图》),对描述的空间目标的类别进行分类(共 9 大类,75 种物标),《航参图》中所描述空间目标的 86.7 % 在 S -57 标准中均有表示,但仅有 26.7 % 的物标与 S -57 标准完全对应。因此,电子航道图可选用海图的 S -57 标准作为数据交换平台,但需进行适当的扩充[3],以满足内河航道的应用需求。
3.2.1 对 S -57 标准中没有描述的物标的扩充
1)陆上地物目标。电子航道图不仅关注航道的信息,对岸上目标也应关注,如烟囱、桥墩等都有可能作为航行时标识物,须加以表达。
2)视频、音频等附加信息。电子航道图的用途比电子海图广泛,它不仅作为航道管理的决策工具,同时还可用于表现一个地区的人文旅游信息等,特别是三峡库区。
在进行库区电子航道图的设计时,将需要扩充的部分单独进行表达,以底图形式表述。
3.2.2 对 S -57 标准中己有的部分目标属性进行扩充表达
1)水位的动态变化。内河河床发育的速度比海底快,流域有着明显的洪水季节和枯水季节,水位变化较大,河床特征变化比较频繁。所以在进行内河航道图水涯线的表达时,要充分考虑由于水位变化而引起的水涯线的动态变化;
2)水流情况比海上复杂。内河流域影响航行安全的一个重要因素就是水流状况。虽然水流在电子海图中也有表达,但是相对内河要求来说过于粗糙(海上的水流情况往往是大面积的均衡流态但内河流态变化频繁),需进行扩充表达;
3)助航设施比海上复杂。由于内河与海上航行条件的巨大差别,作为助航设施的航道标志和航行标志具有内河的鲜明特性,例如解除禁止追尾、分隔线及船舶的流向等,电子航道图需结合国家制定的内河助航标准对 S -57 标准中的助航标志进行扩充表达。
《3.3 终端的低功耗设计》
3.3 终端的低功耗设计
航标多采用免维护铅酸蓄电池供电,RTU 的功耗应尽可能低。图 3 所示的是双单片机架构的航标遥测监控终端[4~6]。单片机 1 为航标在线测量系统的控制核心[7],采用高速 Flash 工艺的 PIC 单片机,其内嵌有 EEPROM 和 Flash 程序存储器、内部 RAM;内置多种功能单元电路,运行电压范围为 2.0~5.5 V。只需少量的阻容元件,便可实现对航标灯运行参数如电压、电流、周期性信号的测量与控制,待机休眠方式下,仅耗电 20 μA/4 V。
《图3》
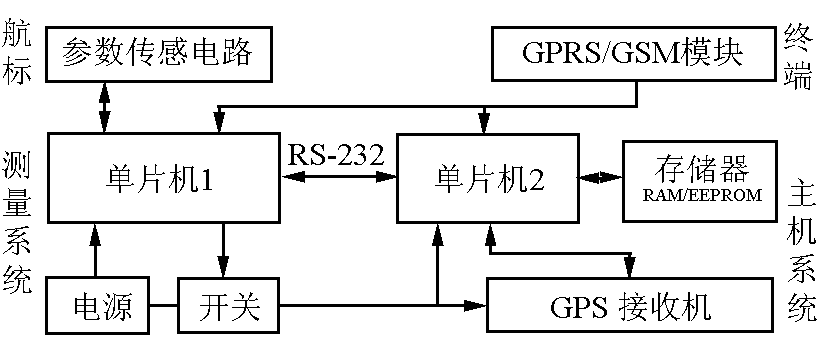
图3 双单片机架构的航标终端结构
Fig.3 Architecture of RTU based on double MCU
单片机2 采用华邦 W78E58 实现,内部有 20 kB 程序存储器,MCS -51 兼容,外扩展 64 kB RAM 和32 kB EPROM,采用 16C554 扩展 4 路串口,分别和单片机测量系统、GPS 接收机、GPRS/GSM Modem 及和计算机调试用串口连接,完成 GPS NMEA -0813 格式处理、GPRS/GSM 数据处理、航标数据处理及调试等功能。这个主机系统中, GPRS/GSMModem 在和无线公网进行通信时,瞬间电流可达 1.5 A,休眠模式为数十毫安;GPS 是另外一个耗电较大的部分,休眠模式需 10 mA 左右的电流,再加上扩展的 RAM,16C554 等电路的功耗,主机系统的功耗远远超过航标测量系统功耗。经实测,主机系统在休眠模式下,功耗仍然占 RTU 功耗的 90 % 以上。
正常情况下,大多数航标灯器的工作和蓄电池电压是正常的,发生异常情况的概率较小,白天灯器灭,不消耗电能,太阳能充电;夜晚灯器亮消耗电能。而航标 RTU 却时时刻刻监测着航标状态,消耗着大部分电能,无疑是不符合建设航标遥测监控系统的本意。因此,RTU 的工作模式应考虑航标实际情况,只有在航标异常时,才发送航标数据,正常情况下,则尽可能地降低 RTU 功耗。基于此,将 RTU 中的主机系统处于受控状态,航标测量系统和 GPRS/GSM Modem 处于常供电工作状态,只有在定时时间到、航标状态变化(亮 -灭,灭 -亮)、航标异常(欠压、灯质错误、被撞击)、中心远程控制等情况时,控制开启 RTU 中的主机系统,完成和监控中心的数据通信工作任务。
按照上述工作模式,当系统仅单片机 1 和 GSM模块工作时,其工作电流 IS 20 mA。正常情况下,如果主机系统每天发送 6 组数据(凌晨和傍晚过渡时间各一次,白天和黑夜各两次),即每 4 h 工作一次,每次工作时间仅 2 min(t0 ),其工作电流 I0 ≈ 300 mA,每天消耗蓄电池的能量按下式计算:

式中,VB 为 4 V 蓄电池电压;tS =24 h;α =0.52,电流变换系数,考虑电源转换效率(本系统  80 %);终端系统占用蓄电池(100 Ah/12 V)的容量:
80 %);终端系统占用蓄电池(100 Ah/12 V)的容量:


计算结果和近 4 年的应用效果均表明,这种低功耗设计合理,满足了现实需求。
《3.4 终端多层分级数据处理》
3.4 终端多层分级数据处理
终端工作环境恶劣,干扰因素多,如灯器的亮和熄变化时的瞬间冲击电流、GPRS/GSM 模块工作时的大脉冲电流及辐射干扰、GPS 飞点[8]、黄昏和凌晨过渡时刻灯器的状态变化等。这些干扰容易导致 RTU 判断航标异常并发送报警数据,从而造成航标的误报警现象。频繁的误报警最后会影响降低整个航标遥测系统数据的可行度,并导致系统弃用。
多层次分级数据处理由非易失性存储器、内存一级缓存、内存二级缓存构成,非易失性存储器,用于保存航标各个参数报警的门限值和等级值。内存一级缓存,用于存放终端实时测量得到的航标状态各个参数。内存二级缓存,用于存放终端测量得到的正式航标状态各参数。终端单片机 1 的处理流程如图 4 所示。
《图4》

图4 航标终端数据处理流程
Fig.4 Flowchart of pharos’ data treatment
将内存一级缓存中实时测量获得的电压值、灯质日光值、工作电流分别和设定的电压高门限、低门限,设置灯质、最小工作电流和日光阈值等进行比较,但出现电压错误、灯质错误、状态错误时,并不马上判定为航标错误,而是进行等级判断。等级判断是一种依靠时间的快速滤波处理方法,即统计错误发生的连续时间,只有连续发生错误的时间超过设定的等级时间时,才判断为航标状态错误,并把内存一级缓存中这个数据复制到二级缓存对应地址中,作为航标的正式数据。在判定航标异常、定时到及 GPRS Modem 事件时,立刻唤醒主机系统,完成和中心的通信。应用效果表明,这种多层分级的数据处理方法降低了误报警率,提高了终端数据的可信度。
《3.5 GPS 定位精度》
3.5 GPS 定位精度
目前,在长江下游南京以下的部分航道,利用交通部在沿海地区设置的信标台发出的差分信号(differential global position systom,DGPS),定位精度可达到 ±5 m 范围以内。而在南京以上的中上游区,因缺少差分信号,单点定位的民用 GPS 精度一般仅为 ±15 m 左右。为解决这一问题,在监控中心附近的已知坐标点设立固定 GPS 差分基准台,得到的差分信号通过数据接口送至数据库中,并发送到远端的航标终端进行差分修正,从而完成前差分处理,这种方法适用于小范围区域。
图 5 是终端 DGPS 设计的硬件电路图[9],图 6 是终端 DGPS 服务的流程设计。图 5 中,GPRS/GSM 模块的串口连接到 U3 第一个串口,GPS 的串口连到 U3第二个串口,同时,GPS 的 RTCM 端连到 U3 第三个串口。当终端通过指定端口和服务器 TCP 连接后,通过 GPRS VPN 发送/接收数据。服务器再向 GPRS 在线的终端发送 RTCM 数据包[10],微处理器接受RTCM 数据包后,转发到 GPS 模块的 RTCM 端,由GPS 模块完成并输出差分后的定位数据。
《图5》

图5 终端 DGPS 设计硬件电路图
Fig.5 Schematic of DGPS in RTU
《图6》
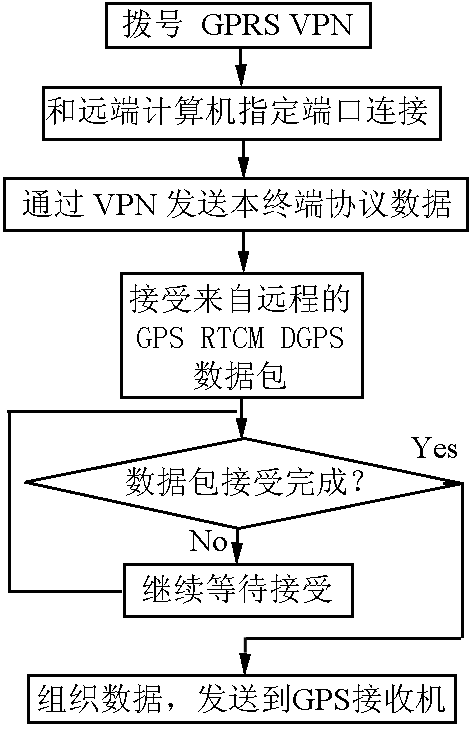
图6 终端 DGPS 流程设计
Fig.6 Flowchart of DPGS in RTU
实际在武汉桥区浮标上得到应用,通过航道局测量队现场测试,实现差分后的 GPS 定位精度为 0.868 m。
《4 应用效果》
4 应用效果
该遥控系统于 2004 年 9 月在库区大坝至鳊鱼溪 98.5 km 河段投入使用,对 230 座航标进行遥测监控。项目实施前,需每天进行 1 次巡检,劳动强度大,且存在维护不及时的现象,影响船舶的夜间航行安全。
项目实施后,巡标员在电脑前就可以知道远程航标的实时情况,且了解的参数更全面、更准确。2005 年 9 月 2 日,台风泰利影响武汉,桥区红浮 3号浮标出现漂失报警,航标维护人员根据 GPS 定位轨迹很快就找到了已经漂失的航标并迅速将其恢复原位。巡标员还可通过数据统计分析预先发现问题,预见到航标的异常时间,提前做好准备,变事后维护为预先控制、主动维护,实现了由“定期巡标”到“故障巡标”的航标维护模式转变。原来航标艇每天查一次标,现每天自动上报 6 次数据,增强了航标维护的针对性和时效性,航标维护质量显著提高,维护正常率达 100 %,保障了航标灯光明亮,航标技术状况良好,助航效果较项目实施前显著提高,为辖区营运船舶提供了更加安全可靠的航道条件。
近 4 年的应用表明,系统改变了航标维护模式,缩短了失常航标的恢复时间,提高了航标的完好率和船舶航行的安全保障能力,为航行船舶提供了更好的夜间航行环境,取得了明显的社会、经济效益。











 京公网安备 11010502051620号
京公网安备 11010502051620号




