

《1 前言》
1 前言
深海富钴结壳(简称钴结壳)矿石是一种赋存于水深 800 ~ 2500 m 的海山硬质基岩上的壳状物,因其富含钴元素而得名[1]。海底开采富钴结壳时,必须详细掌握海底钴结壳矿藏的微地形数据,以便确定最佳开采参数,实施经济有效的开采[2]。没有详细的资料,要成功开采几乎不可能。所以海山上富钴结壳矿藏的开采,首先需要掌握海山上富钴结壳矿区的微地形、矿床分布以及结壳与基岩特性等基础数据。因此,准确获得海底微地形表面高程数据是确立最佳切削深度的关键之一。
目前可用于海底微地形测量的方法有声纳测量、海底照相、电视录象以及立体摄影成像等。海底照相、电视录象以及立体摄影成像等方法由于采矿头工作过程中搅动沉积物,导致开采区域的海水变得浑浊,从而使拍摄的照片或录象画面模糊不清而不能使用[3]。测深侧扫声纳(BSSS)根据估计海底回波到达平行线基阵的相位差,由此测量海底高分辨率地形地貌。但是当前国际上的 BSSS[4,5]存在两个主要问题,一是正下方的测深精度差;二是不能测量从不同方向同时到达某一点的超声回波。因此在多途或者地形复杂的情况下 BSSS 不适用。笔者基于海底的声混响理论,提出了新的理论模型,找到了 BSSS 正下方测深精度差的原因。针对采矿头工作过程中海底微地形的高程数据缺乏成熟的技术和方法的现状,采用单波束超声波测距原理[6~8]获取海底微地形的高程数据使它实时自动探测的信号参数估计技术。它适宜于装在采矿车前头的支架上,在离海底比较近的距离上对海底进行详细实时的测量。
《2 单波束超声测距的基本原理》
2 单波束超声测距的基本原理
超声波换能器发送的超声波信号作为参考信号,在回波信号(接收信号)前加一延时量,通过不断调整延时量的大小,使最小均方误差(LMS)后的回波信号与参考信号之间方差达到最小值,此刻的延时量就是传输时间 t 。根据超声测距公式:

式(1)中,c 为超声波在水中的声速,由于海底温度变化较小,可以看作常量;h 为探测距离,可以通过海底回波到达时间 t 和声速 c 乘积求得。
LMS 算法自适应时延估计 (least - mean - square time delay estimation,LMSTDE) 对不同时延值对应的输入信号进行自适应滤波[9,10],搜索出与参考信号有最小均方误差的时延值即为时延估计值。其输入信号、误差表达式和自适应滤波器权系数的迭代公式如下:




式(2)中,Sk 为输入信号,即系统采集到的超声回波信号; τ 为时延值;式(3)中, ek 为误差; dk 为参考信号; Xk 为 LMS 滤波器的输入信号; Wk 为滤波器权系数;式(4)中, α 为滤波器权矢量收敛系数,也即收敛步长;式(5)中, δ(τ) 为均方误差。
《3 数值模拟》
3 数值模拟
假设换能器 T0 距水底面垂直高度 H = 1.5 m,水中声速 c = 1500 m/s,工作频率 f = 150 kHz,16 倍频采样,间距 d = λ = 10 mm 。则接收阵第 i 个换能器在第 n 个采样时刻接收到的海底回波信号设为


式(6)中, Ai 为回波幅度; gi(n) 为随机噪声,取高斯白噪声。现以 α0 =  为例,由式(6)计算出回波最早到达时刻(采样点数)n0 = 4800,若波束角 Δ
为例,由式(6)计算出回波最早到达时刻(采样点数)n0 = 4800,若波束角 Δ = 2°(0.035 rad),则总波束数 M =180,计算出序号 k =127 。根据上述确定的参数,由式(6)可得到每个接收换能器接收到的同一条带海底回波信号。
= 2°(0.035 rad),则总波束数 M =180,计算出序号 k =127 。根据上述确定的参数,由式(6)可得到每个接收换能器接收到的同一条带海底回波信号。
图 1 和图 2 是接收基阵第 2 个换能器在 0 ~ 200 个采样时刻,根据上述已知参数的计算机仿真结果。由图 3 可看出 n = 2000 时,相位差为 0,此时图形分辨率是最佳的,所获得的高程数据将越精确。
《图1》

图1 含噪声回波信号图
Fig.1 Echo wave signal including noise
《图2》

图2 去噪回波信号图
Fig.2 Echo wave signal eliminating noise
《图3》
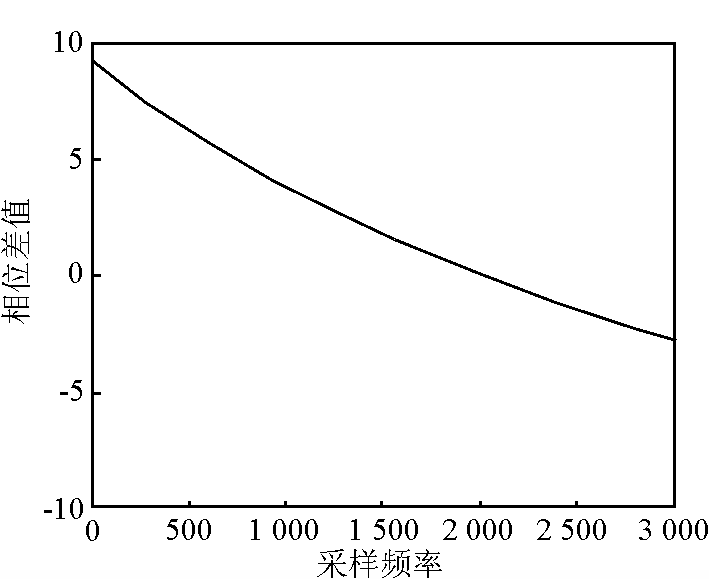
图3 相位差序列信号图
Fig.3 Signal figure of phase difference list
利用分裂孔径 FFT 波束形成技术[10]接收到的信号,即基阵阵元输出首先经过 FFT 得到对应不同中心频率的窄带输出,然后对各个窄子带进行子带高增益波束形成,最后把各子带波束输出平方加权后合并得到宽带波束输出。 子带波束形成的过程如图 4 所示。
《图4》
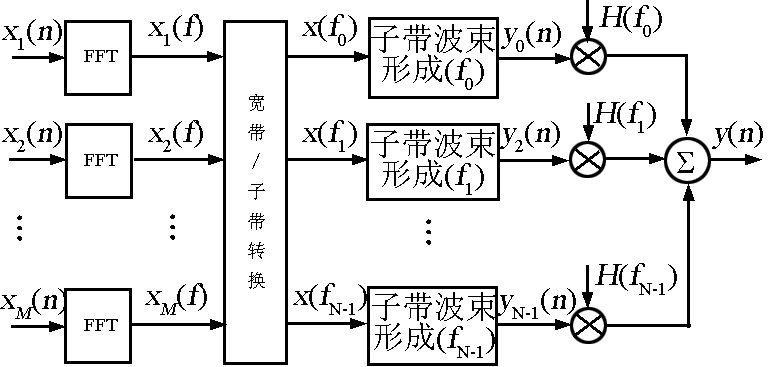
图4 分裂孔径 FFT 波束形成
Fig.4 Split aperture FFT beam forming
根据数值分析结果可知,利用分裂孔径 FFT 波束相位差法能够准确计算出上述探测方法的到达时间(time of arrival, TOA)和驱动时间(drive of arri - val, DOA )。图 5 是 4 个接收换能器信号在完全消除干扰的理想状态下经过迭加的幅度-时间序列信号图,在 n = 2000 时的幅度最大,这进一步证明了数值分析结果的准确性。但是回波的幅度信号比相位信号更易受到外界干扰,因此利用相位信息计算时延量具有更高的精确性和稳定性。
《图5》

图5 4 个接收叠加信号图
Fig.5 Four accepting signal splice figure
《4 试验研究》
4 试验研究
在距离海底表面高 2 m,宽 5 m 的水池范围内,水的温度、压力等因素相对变化极小,声速可以作为常量。因此根据探测方法一致性,在传播介质为水的实验室里进行实验验证具有同样的理论依据。在实验室里利用钴结壳模拟料做的长 50 cm,宽 8 cm 的微形地貌。发射换能器连续发射了 3 个声波信号,回波信号经过 LMS 自适应滤波放大后,由示波器进行采样得到的高程为 2 m 的回波值如图 6 所示,其 XZ 剖面的轮廓如图 7 的第二次探测数据曲线。数字地形高程数据如图 7 所示,其主要实验参数如表 1 所示。
《图6》

图6 2 m 高度距离实验采样的回波波形
Fig.6 Sampling echo wave with distance of 2 m height
《图7》

图7 数字地形高程数据图
Fig.7 Numeric landform height figure
《表1》
表1 主要实验参数
Table1 Main experiment parameters

从图 7 可以看出,两次实验结果基本上能反映出真实微地形的起伏变化趋势,但有一定的误差,尤其是起伏较大的地方。对图 7 的 3 条数据曲线(水平长度为 46 cm)分别进行面积积分如下:真实地形轮廓线的面积 S0 = 567.71 cm2;第一次探测数据曲线的剖面面积 S1 = 546.41 cm2;第二次探测数据曲线的面积 S2 = 551.78 cm2 。两次探测的面积相对误差为


由面积相对误差可知,两次实验结果基本上达到了钴结壳开采的精度要求( 5 %)。其误差产生的原因,主要有以下几点。a. 在实验室中探测,外界噪声干扰大,信号检测困难;b. 探测方法本身的原理误差,如条带宽度、波束角以及工作频率等参数的选择,这些参数直接影响到获得地形高程数据的数量和精度;c. 硬件电路和软件处理等方面带来的系统误差;d. 其他人为读数和计算等操作不当造成的随机误差。
5 %)。其误差产生的原因,主要有以下几点。a. 在实验室中探测,外界噪声干扰大,信号检测困难;b. 探测方法本身的原理误差,如条带宽度、波束角以及工作频率等参数的选择,这些参数直接影响到获得地形高程数据的数量和精度;c. 硬件电路和软件处理等方面带来的系统误差;d. 其他人为读数和计算等操作不当造成的随机误差。
《5 结语》
5 结语
深海钴结壳微地形近程探测采用 LMS 算法自适应时延估计原理测距系统,从而很大程度上消除了实际换能器与理想换能器的频率特性差及信道起伏,实际换能器频率特性差对输出信号产生的影响,使整个系统保持平坦的频率响应,而输出均方差最小即均衡效果最好时的输入信号时延值当然就是信号的真实时延值,大大提高了检测精度。通过进一步深入研究,海底超声波微地形探测系统获取采矿头至海底面的高程数据,由数据重构,最终求得富钴结壳微地形地貌模型。











 京公网安备 11010502051620号
京公网安备 11010502051620号




