


《1 定性控制策略》
1 定性控制策略
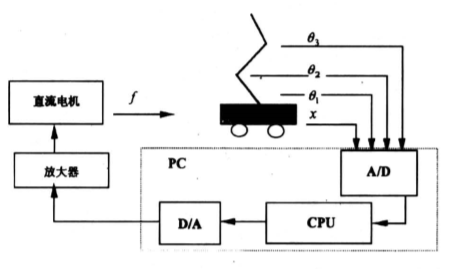
杂技顶杆表演之所以为人们熟悉,不仅是其技艺精湛,更重要的是其物理机制与控制系统的稳定性密切相关。它深刻地揭示了自然界一种基本规律,即一个自然不稳定的被控对象,通过控制手段可使之具有良好的稳定性。这一规律已成为当今航空航天器设计的基本思想,即牺牲飞行器的自然稳定性来确保它的机动性。不难看出杂技演员顶杆的物理机制可简化为一个倒置的摆,也就是人们常称之为的倒立摆或多级倒立摆系统。见图1。
三级倒立摆系统主要由控制对象、导轨、电机、皮带轮、传送带以及电气测量装置组成。控制对象由小车、一摆、二摆、三摇组成。一摆、二摆、三摆由轻承电位器连接,可以在平行导轨的铅垂平面自由转动,同时测量摄的相对偏角。图中的倒立摆相当于杂技顶杆演艺中的多级杯,小车相当于顶杆人;小车受到的外加控制力f及相应的位移x相当于顶杆人在表演时的操作行为。倒立摆的控制作为控制界的经典难题,一直是研究的热点。其研究意义在于;作为一个被控对象,是一个高阶次、不稳定、多变量、非线性.强耦合的自然
《图1》
图1 倒立摆系统的控制逻辑图
Fig.1 Control block diagram of aninverted pendulum system

不稳定系统,摆杆级数越多,越难稳定,复杂性呈儿何级数上升;作为一个装置,它的结构又相当简单而且成本低廉,稳定效果一目了然。因此,非常适合用来对多种不同控制理论和方式进行实验比较,成为控制理论研究中一种理想而又典型的验证装置。男一方面,由于倒立摆系统与机器人和飞行器等的控制有很大的相似性,因此倒立摆的研究还具有重要的工程背景和实际意义。此项试验研究被称之为每个控制研究部门皇冠上的珍珠[1],已经在学术界研究了30多年。
控制理论发展到今天,虽然控制方法多种多样,但建立精确的数学模型一直是基础。然而建立数学模型本身是一件十分困难的事情,往往花费大量的功夫,在确定严格的理想的边界条件下,仍然得不到很好的动力学方程和线性化方法。观察生活中的现象,我们不难发现,人作为高级智能控制器能对许多复杂的、难以建立数学模型的系统进行很好的控制。一个自然不稳定的被控对象,通过人的直觉的、定性的控制手段,就可以使其具有良好的稳定性。对这样一个复杂、时变、强耦合、非线性倒立摆系统的生物模型和控制规律,要想用精确数学方法来定量刻画,如果不是不可能,也是十分困难的,自然语言的表述方法具有不可替代性。
把人工智能原理应用在控制系统中,用语言值构成规则,形成一种直观推理的方法。这种拟人控制,不要求给出被控对象精确的数学模型,仅仅依据人的经验、感觉和逻辑判断,将人用自然语言值定性表达的控制经验,通过语言原子和云模型转换到语言控制规则器中,就能解决非线性问题和不确定性问题。因此,本文提出用云作为定性定量之间有力的转换工具就具有极其重要的理论意义和应用价值。
《2 云模型一一定性和定量之间转换的有力工具》
2 云模型一一定性和定量之间转换的有力工具
云是用语言值表示的某个定性概念与其定量表示之间的不确定性转换模型。云由许许多多云滴组成,每一个云滴就是这个定性概念在数量上的一次具体实现,这种实现带有不确定性,即模糊性和随机性。设X是一个集合X={x},称为论域。关于论域X中的定性语言值Ã,是指对于任意数值工都存在一个有稳定倾向的随机数µÃ(x),叫作x隶属于Ã的程度,隶属程度在基础数值变量上的分布称为云。云的数字特征用期望值Ex,熵En,超熵He三个数值表征,它把模糊性和随机性完全集合到一起,构成定性和定量相互间的映射,作为知识表示的基础。其中Ex可以认为是云的重心位置,反映了最能够代表这个定性概念的数值。En是定性概念亦此亦彼性的度量,它的大小反映了在论域中可被语言值接受的数值范围,即模糊度;同时还反映了在此范围内的数值能够代表这个语言值的概率。He是熵En的离散程度,即熵的熵,反映了每个数值隶属这个语言值程度的凝聚性,即云滴的凝联程度。
给定云的三个数字特征,期望值Ex、熵En和超熵He,可以通过以下正态云发生器的算法生成云滴:
(1)产生一个期望值为Ex,方差为En的正态随机数;
(2)产生一个期望值为En,方差为He的正态随机数En';
(3)计算
\(y=\exp \left[-(x-E x)^{2} / 2\left(E n^{\prime}\right)^{2}\right]\)
(4)令(x,y)为一个云滴,它是该云表示的语言值在数量上的一次具体实现,其中x为定性概念在论域中这一次对应的数值,y为x属于这个语言值的程度的量度;
(5)重复步骤1到步骤4,直到产生满足要求数目的云滴数。
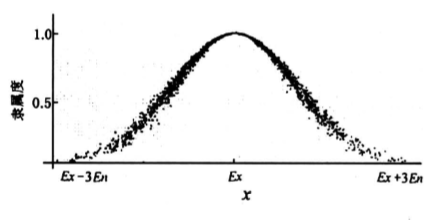
这样的云发生器称为正向云发生器。用它生成的云见图2。根据正态分布规则,99.74%的云滴都将落在(Ex-3En,Ex+3En)范围内,根据上述算法中的第3步计算,任何时候都会有:0<y<=1。
《图2》
图2 用多云滴构成的云来表示一个定性概念
Fig.2 A qualitative concept represented by many cloud drops

如果已经知道若干云滴,可以反计算出它们所代表的正态云的三个数字特征:期望值Er,、熵En和超熵He,称之为反向云发生器,也可以构造带条件的正态云发生器。我们还可以利用类似方法构造其他分布的云发生器,如泊松云、Г云等。
《3 不确定性推理机制》
3 不确定性推理机制
一条定性规则的形式化描述为,“If A then B“,其中A,B为用云表示的语言值。当一个特定的数值a1(a1€A)触发该规则时,就会产生一个不确定的数值b1,(b1€B)。我们用带条件的两个云发生器来构造单条定性规则。CGA表示对应输入平面语言值A的带X条件的云对象,CG5表示对应输出平面语言值B的带Y条件的云对象。当输入平面的某一特定的输入值X刺激CG时,CGA随机地产生一个或一组值,这些值反映了对应定性规则的激活强度,作为条件去触发云CGB,产生一个或一组云滴,反映单规则推理的不确定性,实现了不确定性在推理过程中的传递。
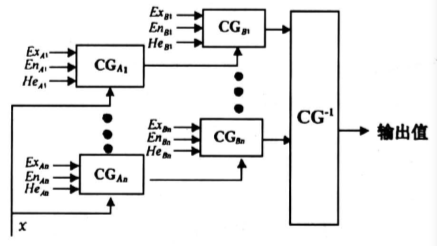
在单规则生成器的基础上,可以构造多规则发生器。N条定性规则的形式化描述为:“If Ai then Bi“,其中Ai,Bi;为用云表示的语言值,i=1,2…。图3说明了多条定性规则的构造方法。图3中,CGAi和CGBi(i=1,2...n)分别表示对应输入平面语言值Ai和输出平面语言值Bi的云发生器。当输入平面的某一特定的输入值X刺激各条规则发生器的前件CGAi时,每一CGAi产生一个或一组值,作为条件去触发相应的云发生器CGBi,产生多组云团。将所有的云团送入到逆向云发生器中,可以用最小二乘法生成最能够拟合这些云团的正态虚拟云,取其期望值作为输出,或者取这个正态虚拟云发生器产生的云滴作为输出。这个推理过程可参见图4。
《图3》

图3 多规则生成器
Fig.3 Multi-rule construetor
《图4》

图4 多规则被同时激活时的推理机制
Fig.4 The reasoning mechanism while multi-rules are activated
图4a表示第3和第4条规则被激活,通过规则前件传递到后件,图4b表示被激活产生的多组云团。拟合出正态虚拟云,取其期望值作为输出。
《4 倒立摆的智能控制实验与分析》
4 倒立摆的智能控制实验与分析
《4.1 实验环境》
4.1 实验环境
我们采用了保定航空技术实业有限公司生产的“金棒-1“型倒立摆实验平台,整个实验装置由平台、PENTIUM166计算机、HY-1232A/DD/A板、接口电路以及功率放大电路等组成。位移-由型号为WDX7、阻值为10kQ的多圈式线绕电位器测量,一摆、二摆、三摸的角度由型号为WDD35DL、阻值为2kQ、独立线性度为0.1%、
可在360º范围内旋转的导电塑料轴承电位器测量,使用稀土永磁直流力矩电机,其控制电压在一5V到5V之间,A/D、D/A转换精度为12位。小车位移、一摆、二摆、三摆角度的变化量分别由传感器测出,通过模数转换送入控制器,控制器输出控制量,通过数模转换和功率放大电路放大后,驱动电机带动小车,使整个系统达到动态平衡。实验床的主要物理参数如下:

《4.2 三级倒立摆的四种动平衡模式的实现》
4.2 三级倒立摆的四种动平衡模式的实现
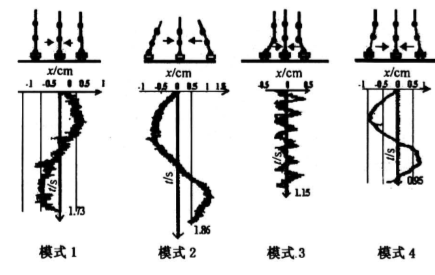
利用上述定性规则构成器和推理机制,成功地实现了单电机控制的一级、二级、三级倒立摆系统的稳定,它们均可以在导轨上长时间地保持动平札状态。通过计算机健盘对三级倒立摆的动平衡状态进行实时干预,改变规则控制器中的不同云发生器的三个数字特征值,可以有效地改变动平衡姿态。为此,我们首先引出关联度的概念。在倒立摆维持稳定的情况下,小车和摆杆之间、摆杆和携杆之间常常表现出不同力的向上的传递程度,可以通过它们之间的电位传感器a;度量,这里小车和一级摆杆之间的a角相同于一级摇杆的垂直角(指摆杆与垂直线之间的夹角),一级摆杆和二级摆杆之间的a角不同于二级摆杆的垂直角。二级摆杆和三级摆杆之间的as角也不同与三级摆杆的垂直角。在动平衡时,a;幅值越小,摆杆之间的直线性越好,则关联度越大。通过试验,我们得到了三级倒立摆的四种典型的动平衡模式。
模式1:小车和下摆之间、下摆和中摆之间、且中摆和上摆之间的关联度都大。这时小车在轨道上的位移小,远看好象是一级摆直立。
模式2:小车和下摆之间的关联度小,而下摆和中摆之间、且中摆和上摆之间的关联度都大。这时小车在轨道上的位移大,上、中、下摆之间直线性好,远看好象是个一级携在左右倾斜摆动,且摆动明显。
模式3:小车和下摆之间的关联度小,下摆和中摆之间的关联度小,而上摆和中摆之间的关联度大。这时小车在轨道上的位移较大,上中摆直线性好,中下摆直线性差,远看下摆在左右倾斜摆动,且摇动明显,但是上摆和中摆始终直立。
模式4,小车和下摆之间的关联度小,上摆和中摆之间的关联度较小,而下摆和中摆之间的关联度较大。这时小车在轨道上的位移大,上中摆直线性差,中下摆直线性好些,远看中、下摆在左右倾斜摆动,且摆动明显,但是上摆始终直立。
图5给出了实验测得的四种典型的动平衡模式下的小车位移和时间关系曲线,可以看出在不同模式下小车的摆动幅度和周期的差别。图6给出了典型的动平衡模式之间的动态切换关系曲线。
《5 试验结果和今后工作》
5 试验结果和今后工作
国际上每年都有成百篇关于倒立摆控制研究的论文发表[1~6]。其中大部分是建立在计算机基础上的仿真研究,只有约八分之一的学者在对实际物理摆进行设计、实验和控制研究,如日本工业大学、加拿大多伦多大学、德国鲁尔大学和美国亚利梵那州立大学等[7~10],多数人用状态空间方法建立数学模型,然后线性化求得控制函数再进行控制。到目前为止,声称能稳定三级倒立摆的单位平不多见[9,10],能用单电机成功控制三级倒立摆稳定在不同典型模式上,尚未见实验数据报道。
《图5》

图5 三级倒立摆四种动平衡模式下小车的位移和时间关系曲线
Fig.5 The curves taken from real control of the stabitization of a triple link inverted pendulum system with four dynamic balancing
patterns
《图6》

图6 三级倒立摆不同动平衡姿态之间的动忘切换关系曲线
Fig.6 Dynamic switching between different balancing patterns
目前我们用智能控制方法取得如下的实验结果:单电机控制的一级、二级、三级倒立摆系统均可以在导轨长时间地保持动平衡状态;可以让倒立摆在导轨上按指定步长和方式行走;可以让倒立摆在倾斜轨道上保持平衡;实现了一级倒立摆系统两种典型的动平衡模式、二级倒立摆系统三种典型的动平衡模式和三级倒立摆系统四种典型的动平衡模式;通过键盘实时干预,分别实现了一级、二级、三级倒立摆系统不同平衡模式之间的动态切换。控制系统具有较强的鲁棒性,可以敲击,或用正摆撞击;可以在一、二、三级携杆一侧分别附加一重物,使之成为偏心摆,不改变任何控制参数,系统仍能保持平衡。系统鲁棒性很强还表现在:可以分别在一、二、三级倒立摆系统中的上摆顶端放置一个重于摆杆的带花的花瓶,或放一个盛酒的高脚酒杯,柔性体和流体虽然增加了系统的不确定性,但是不改变任何控制参数,系统仍能保持平衡。
本文提出的智能控制方法,不要求给出被控对象的精确数学模型,将人用自然语言值定性表达的控制经验,通过语言原子和云模型转换到语言控制规则器中,就能很好地实现对倒立摆的控制。下一步,将对倒立摆系统的鲁棒性进行更深入的分析,开展对四级倒立摆的控制研究。由于语言控制规则器有很大的通用性,控制策略明确、直观,无须冗繁的推理计算,只要对数字特征参数加以修改,就可适用于不同应用的控制系统。相信作为定性定量互换模型的云模型在控制领域将得到更广泛的应用。随着云理论日趋完善,除了在智能控制方面,下理论还被用于知识开采和数据挖掘、跳频通信、C4ISR系统效能评估、信息安全和保密、语言翻译和模式识别等方面[11~14],并将继续探索云理论在其它领域的应用。











 京公网安备 11010502051620号
京公网安备 11010502051620号




