《1 引言》
1 引言
计算机视觉的主要任务之一就是图像的边缘检测。边缘是图像最基本的特征,所谓边缘是指图像周围像素灰度有阶跃变化或屋顶变化的那些像素的集合。边缘是边界检测的重要基础,也是外形检测的基础。边缘广泛存在于物体与背景之间、物体与物体之间、基元与基元之间,因此它也是图像分割所依赖的重要特征。边缘检测是图像处理和计算机视觉领域内的经典研究课题,有较长的研究历史。目前普遍采用的边缘检测算子有: Marr-Hidreth 边缘检测算子(即 LOG 算子)、Sobel 边缘检测算子、Canny 边缘检测算子[1] 等。
众多边缘检测算法中,比较普遍的一个方法是:首先将离散的数字图像用一个平滑曲面表示,然后通过求该曲面的梯度幅度或者对曲面进行拉普拉斯变换求零交叉来进行边缘检测。著名的 Marr 算子就是具有代表性的此类算法,其采用高斯基函数拟合平滑曲面。另外,文献[2]提出了以 B 样条为基函数来拟合光滑曲面,然后对其进行边缘检测,同样取得了很好的效果。但是上述两种方法中拟合的曲面只是原始离散图像的一个近似,也就是说平滑曲面在原始图像坐标点的值并不等于原始图像的值,因此用于边缘检测的图像和原始图像有一定的误差。而误差中可能包含一些边缘信息,故在进行光滑平面拟合时,有可能将一些小的边缘特征信息给平滑掉。
基于一种新的基函数———形参均匀 B 样条基函数,提出了用盈亏修正[3]的方法对图像进行边缘检测。首先对图像的原型值采用盈亏修正,然后利用形参均匀 B 样条修匀公式对修正的图像进行光滑曲面拟合,最后对拟合的曲面进行边缘检测。利用最佳的拟合曲面进行边缘检测时,一般要求拟合曲面既有足够的光滑性,又与原图像具有相同的凸凹性。而形状参数均匀 B 样条恰好具备这些性质。它是均匀 B 样条的扩展,保持了均匀 B 样条曲线的一些实用的几何性质,特别是带有一个可调形状参数,具有很大灵活性,在曲线、曲面拟合中更具有方便性和广泛性。同时,采用盈亏修正算法,改进了光滑曲面的逼近性,可期望得到更好的边缘检测结果。
《2 带形状参数均匀 B 样条基函数的构造及性质[4]》
2 带形状参数均匀 B 样条基函数的构造及性质[4]
为得到带形状参数均匀 B 样条基函数,构造非负函数 满足条件:
满足条件:
1 ) 

2) 是 C0 连续(零阶点连续)的分两段二次函数;
是 C0 连续(零阶点连续)的分两段二次函数;
3 )
由条件 1 和条件 2 可以得到

由条件 3 得到  + b = 1,若令 b = 1 - λ,则
+ b = 1,若令 b = 1 - λ,则  。将
。将  , b 代入上式,得
, b 代入上式,得

其中 -1  λ < 1。
λ < 1。
令  称
称  为二阶形状参数均匀 B 样条的基函数。
为二阶形状参数均匀 B 样条的基函数。
k 阶(k  3)形状参数均匀 B 样条的基函数由
3)形状参数均匀 B 样条的基函数由

 递推得到。
递推得到。
当 k 3时,根据定义可以得到 
 所具有的性质。称
所具有的性质。称 为 k 阶带形状参数均匀 B 样条基函数,其中 λ 为形状参数,取值范围[ -1,1 ],在实际应用中可根据需要确定其取值。当 λ = 0.3 时,二阶带形状参数均匀 B 样条基函数如图 1 所示。
为 k 阶带形状参数均匀 B 样条基函数,其中 λ 为形状参数,取值范围[ -1,1 ],在实际应用中可根据需要确定其取值。当 λ = 0.3 时,二阶带形状参数均匀 B 样条基函数如图 1 所示。
《图 1》
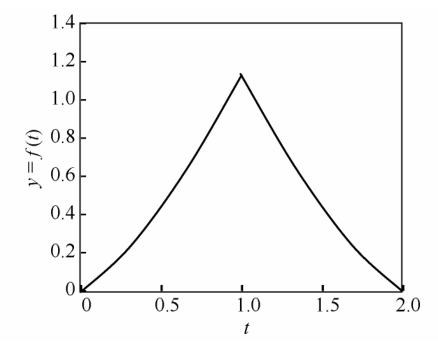
图 1 二阶形参均匀 B 样条基函数(λ = 0.3)
Fig.1 Basic function of quadric B-spline with parameter
容易验证上述样条基函数有以下性质:
性质 1 非负性 ,
, ,
, ;
;
性质 2 局部支集性

性质 3 归一性 ,k 3
,k 3
性质 4 对称性
性质 5 连续性 在整个参数空间上为 k -2 阶连续;
在整个参数空间上为 k -2 阶连续;
性质 6 求导公式 
 ;
;
由以上定义和性质可以得出当 λ = 0.5,i = -2 时,4阶形状参数均匀 B 样条基函数为:


N3(t)是二阶连续3次样条函数,形状如图2所示。
《图 2 》
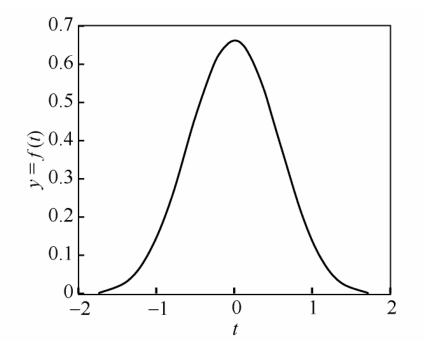
图 2 N3(t)的图像(λ = 0.3)
Fig.2 Image of N3(t)
《3 图像的形状参数均匀 B 样条光滑曲面逼近》
3 图像的形状参数均匀 B 样条光滑曲面逼近
通过积分的手段对函数进行平滑和逼近[2]。定义 1 函数 及正数 h,称
及正数 h,称

为函数的一次平滑函数。其中 h 为磨光宽度。
在实际应用中,对平滑函数有如下要求:
1) g(x)是偶函数;
2)满足归一化条件 ;
;
3)设 G(w)为 g(x)的傅立叶变换,则有

由以上定义和性质可知  (其中
(其中  满足平滑函数的要求,可以用作的平滑函数。对于给定的型值点
满足平滑函数的要求,可以用作的平滑函数。对于给定的型值点
 ,i = 0,1,…,N,其 k 次磨光函数可表示为
,i = 0,1,…,N,其 k 次磨光函数可表示为

根据文献[5],一个平滑函数的平滑性和逼近性是一相对矛盾体,随着平滑次数的增大,平滑性能也随之变好,能够很好的剔除噪声,但同时其支撑区间也变大,由此处理时间也随之增大。平滑次数合理取值,既可以获得较好的逼近性也可以减少处理时间。一般情况下取 k =3,可以获得较好的平滑性和逼近性。
对于给定 N × N 的数字图像  ,可以看成是一个曲面的均匀采样,因此可采用形状参数均匀 B 样条对其进行磨光。由于形状参数均匀 B 样条具有局部支集性,根据文献[2],磨光宽度 h 取整数 1,对图像可用曲面来表示:
,可以看成是一个曲面的均匀采样,因此可采用形状参数均匀 B 样条对其进行磨光。由于形状参数均匀 B 样条具有局部支集性,根据文献[2],磨光宽度 h 取整数 1,对图像可用曲面来表示:


其中 k, 可以不同。式(3)定义了一个具有良好保凸性的光滑曲面,它是图像的形状参数均匀 B 样条光滑逼近。
可以不同。式(3)定义了一个具有良好保凸性的光滑曲面,它是图像的形状参数均匀 B 样条光滑逼近。
由于形状参数均匀 B 样条 Nk(x)具有局部支集性,因此图像在点(i,j)处的拟合值只依赖于原图像在该点邻域内的灰度值,与该邻域外的灰度值无关。其中该邻域由 Nk(x)定义域确定为

一般情况,平滑函数的平滑次数取 k = =3,则邻域为

当 x,y 取整数时,Ω3.3(x,y)变为 3×3 邻域,由此式(3)改写为


《4 盈亏修正法改进的光滑曲面逼近》
4 盈亏修正法改进的光滑曲面逼近
用形状参数均匀 B 样条公式表示的平滑曲面虽然保留了原始图像的突变信息,对图像具有平滑作用,但是原始图像经平滑后变模糊了,即用式(6)表示的平滑曲面和原始图像有一定的误差,而误差图像中所包括的一些边缘信息就可能检测不到。
基于上述问题,采用盈亏修正法加以改进。所谓盈亏是指对原型值进行修改的新型值,若拟合函数比原型值小,则加大原型值(盈);反之则减小原型值(亏)。由此对原始图像数据进行调整,用盈亏调整后的图像数据
 代替式(6)中的图像数据。实践证明,用这种方法得到的平滑曲面不但具有保凸性,而且得到的图像更逼近原始图像。
代替式(6)中的图像数据。实践证明,用这种方法得到的平滑曲面不但具有保凸性,而且得到的图像更逼近原始图像。
定理1对于给定的型值点
 ,其相应的3次磨光函数
,其相应的3次磨光函数 在节点处有如下性质:
在节点处有如下性质:
1)逼近性质 
 ;
;
2)凸凹性质 
 。
。
证明 k = 3 将 xi 代入式(2),
定理 1 中,性质 1 表明从平滑曲线得到的曲线和原始数据有一定的误差;性质2则表明平滑曲线和原始数据有相同的凸凹性。为了提高磨光曲线逼近于原始数据的精度。采用

计算差值,其中 。根据差值
。根据差值  对原型值
对原型值  作盈亏修改。若 < 0,则拟合函数值
作盈亏修改。若 < 0,则拟合函数值 比原型值 小,须加大原型值(盈);反之,则拟合函数值 比原型值 大,须减小原型值(亏)。新的型值点可以表示为
比原型值 小,须加大原型值(盈);反之,则拟合函数值 比原型值 大,须减小原型值(亏)。新的型值点可以表示为

σ 的大小可根据需要而设,这样使得盈亏值较合理。大多数情况下 σ 取 1 即可满足要求。
根据式(7),将 作为新的型值点用式(2)进行平滑。根据定理 1,可以得出新的平滑曲线在型值点处的值更加逼近原型值,且具有一致的凸凹性。
作为新的型值点用式(2)进行平滑。根据定理 1,可以得出新的平滑曲线在型值点处的值更加逼近原型值,且具有一致的凸凹性。
将一维情况推广到二维,同样可以采用盈亏修正的磨光法得到光滑、保凸且精确地拟合曲面。
1)对于 N × N 的数字图像,按照式(6)计算得到平滑的图像数据。
2)计算平滑图像和原始图像对应像素点的误差 。
。
3)对平滑的图像进行盈亏修正得到新的图像数据 。
。
4)将修正后的图像数据代入式(6),得到盈亏修正后的光滑曲面公式


此时对应像素点的像素值更加逼近原始图像点。
《 5 图像的边缘检测》
5 图像的边缘检测
求一阶导数的局部最大值与求二阶导数的零交叉点是类似的过程。由于光滑信号的拐点可能是一阶导数的模的极大值或者是极小值,而极大值对应于信号的突变点,极小值对应于信号的缓变点。用二阶导数零交叉来区分这两类点是比较困难的,但利用一阶导数模极大值就可以很方便的找出突变点。所以如果采用局部极值检测的方法有更多优点[3]。算法采用式(8)。
设 n 是图像平面内边缘线的单位法向量,则它可由

来近似,而 在边缘点处,若
在边缘点处,若 沿 n 方向达到最大值,则有
沿 n 方向达到最大值,则有 ,因此求的局部极大值等价于求
,因此求的局部极大值等价于求 的零交叉点。由于 的局部值可用
的零交叉点。由于 的局部值可用

计算,梯度矢量的模为

幅度角为
其中  可以直接由式(1)求导。
可以直接由式(1)求导。
在求拟合曲面一阶导数的模极大值时,可以沿 方向用比较法求
方向用比较法求 的局部极大值点,令
的局部极大值点,令  ,
,  ,
,  分别是 方向的3个相邻点,若
分别是 方向的3个相邻点,若
 ,且至少有一个不等式成立,则 u 可以认为是在方向的极大值。在实时处理时,也可以用阈值法确定图像中大目标的边缘
,且至少有一个不等式成立,则 u 可以认为是在方向的极大值。在实时处理时,也可以用阈值法确定图像中大目标的边缘

若不需要分析边缘的类型和特征,则可以作简单的二值处理,即只标出像素点 是或不是边缘点,此时可以用
是或不是边缘点,此时可以用

的零交叉点来检测边缘[6],其中 可以由式(1)直接求导得到。
可以由式(1)直接求导得到。
对于 N × N 的图像,按照公式求 的局部极大值与求
的局部极大值与求  的零交叉这两种边缘检测算法,其中和均由解析式给出,不需要差分计算,易于快速计算,计算复杂度为
的零交叉这两种边缘检测算法,其中和均由解析式给出,不需要差分计算,易于快速计算,计算复杂度为  。
。
《6 实验结果》
6 实验结果
采用标准 Lena 图像(图 3a)和 Lena 加噪图像(图 3b)作为试验数据,应用所提出的算法进行了仿真实验。首先,验证算法对图像的平滑和压噪能力,分别采用形参均匀 B 样条公式和盈亏修正法对加噪 Lena 图像进行平滑分析:选取形状参数 λ= 0.30,  。结果如图 3c 、图 3d 所示。其次,采用所提出的盈亏修正算法对标准 Lena 图像进行了边缘检测分析,选取形状参数 λ = 0.30,用盈亏修正算法,求取的局部极大值所检测出的图像边缘如图 4a 所示。当选取形状参数 λ = 0.35 时,用盈亏修正算法,求取 的零交叉所检测的图像边缘如图 4b 所示。为了同其他边缘检测算法比较,同时给出了 sobel 算子和 Canny 算子的图像边缘检测结果,分别如图 4c 和图4d 所示。
。结果如图 3c 、图 3d 所示。其次,采用所提出的盈亏修正算法对标准 Lena 图像进行了边缘检测分析,选取形状参数 λ = 0.30,用盈亏修正算法,求取的局部极大值所检测出的图像边缘如图 4a 所示。当选取形状参数 λ = 0.35 时,用盈亏修正算法,求取 的零交叉所检测的图像边缘如图 4b 所示。为了同其他边缘检测算法比较,同时给出了 sobel 算子和 Canny 算子的图像边缘检测结果,分别如图 4c 和图4d 所示。
《图 3》
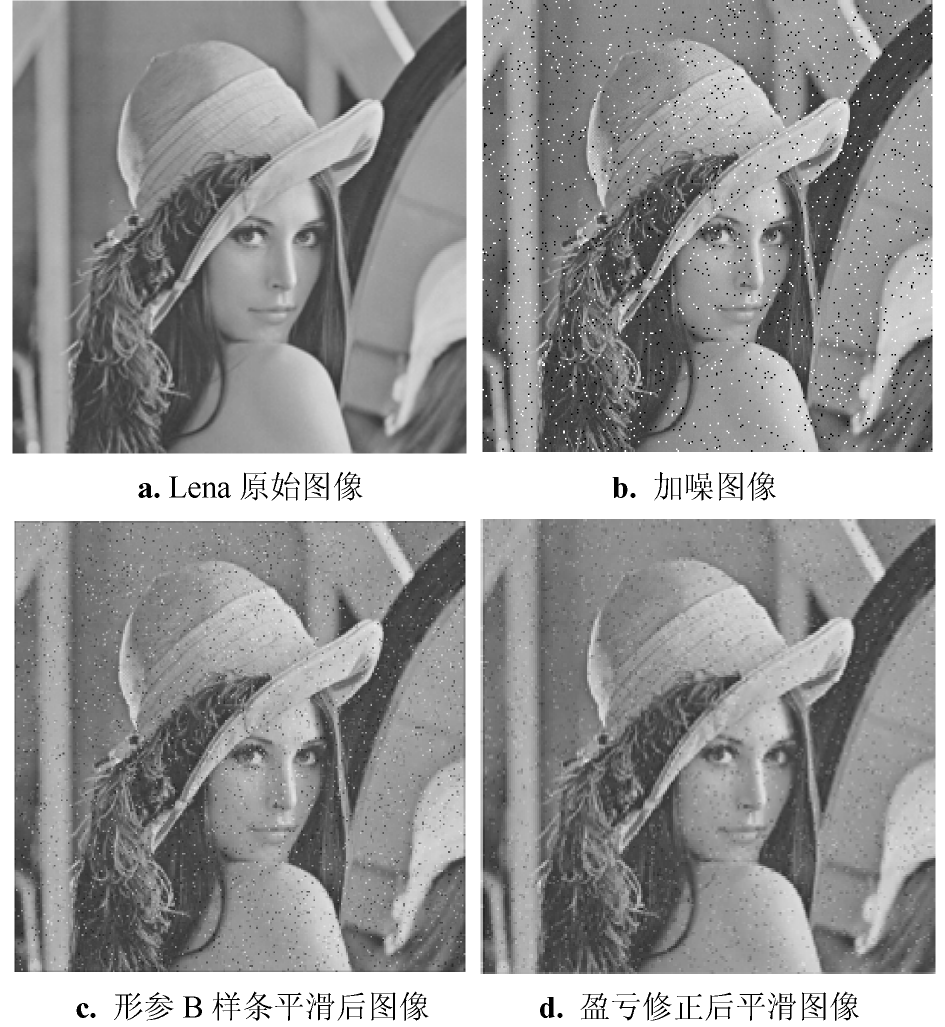
图 3 Lena 图像曲面平滑
Fig.3 Lena images and it's smooth surface approximation
《图 4》
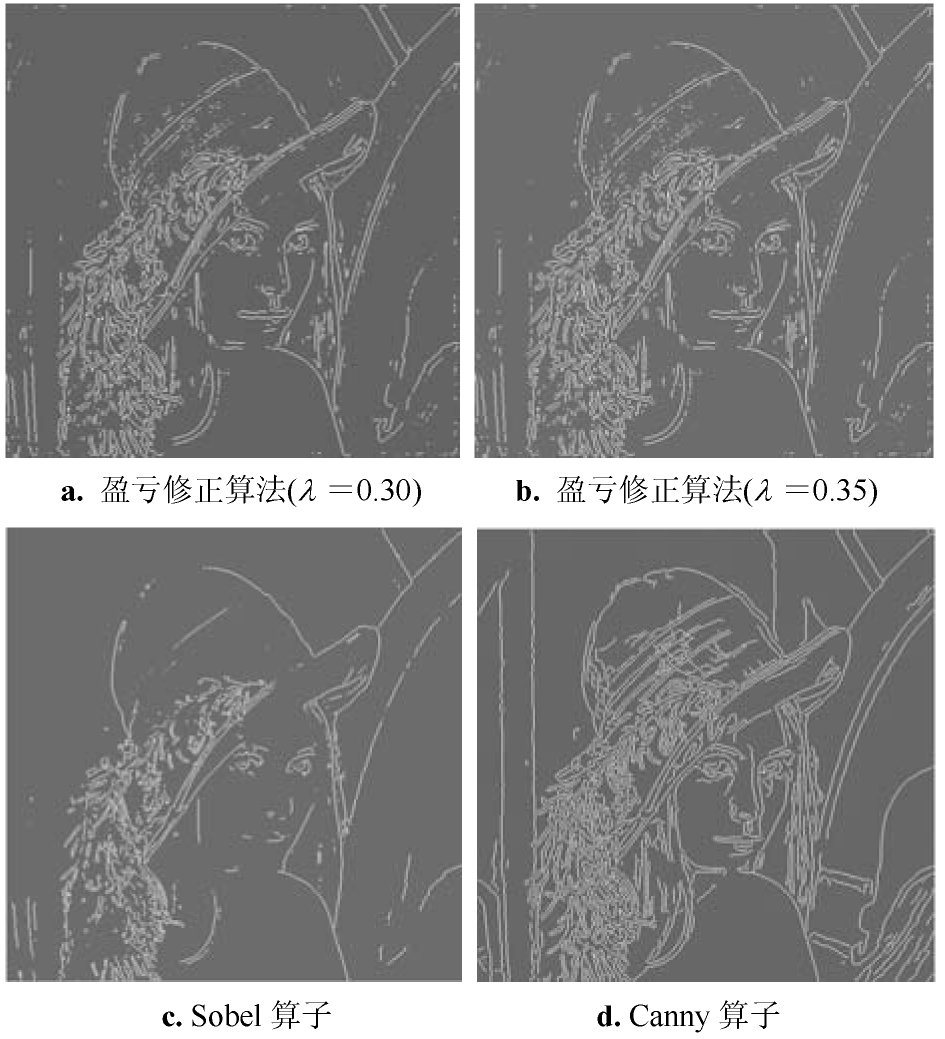
图 4 Lena 图像边缘检测结果
Fig.4 Edge detection of Lena images
可以看出,采用盈亏修正数据计算所得的图像(图 3d)与用形参均匀 B 样条直接平滑得到的图像(图 3c)相比较,具有更好的视觉效果。因此采用盈亏修正算法拟合的曲面进行边缘检测,效果会更好。所提出的边缘检测算法在对盈亏修正后的光滑曲面进行检测时,只需计算该点周围的整数点的值,简捷可靠。算法系统资源占用少。实验证明该算法精度较高、稳定可靠,而且计算效率相当高,便于实时处理,是一类比较成功的边缘检测算法。
《7 结论》
7 结论
形参均匀 B 样条函数带有一个形状参数,形参的调节可以满足不同的要求,具有很大的灵活性。同时该样条函数具有保凸性、低通性,具有很好的去噪性能。利用该样条函数建立了盈亏修正的图像边缘检测方法。实验表明该算法稳定可靠,计算效率高,便于实时处理,是一类比较成功的算法。此外还可以通过形状参数和对修正次数进行微调,得到最佳的检测效果。另外利用该方法构造的光滑曲面除了用于边缘检测还可以用于其他图像分析,噪声的平滑过滤、区域分割等。











 京公网安备 11010502051620号
京公网安备 11010502051620号




