

《一、前言》
一、前言
2015 年,国家自然科学基金委员会与中国工程院联合开展的“中国工程科技 2035 发展战略研究” 项目启动会在中国工程院召开,拟开展自上而下的 系统性研究,广泛吸纳科技界、产业界、经济界和相关管理部门的集体智慧,凝聚我国产业升级和经 济社会发展的战略需求,扫描重大共性技术和关键 科学问题,提出推动与支持我国工程科技发展的政 策工具及管理措施 [1]。技术预见作为世界各国普 遍采用的一种技术发展战略评估方法,对我国工程 科技 2035 发展战略研究中技术清单的提出与技术 产业布局有着十分重要的影响。
技术预见是一种系统的评估方法,其评估对象 是对产业竞争力、社会发展水平和民众生活质量提 高产生强烈影响的科学技术 [2]。它旨在更准确地 分析科技未来的发展趋势,为区域及产业内的科技 发展制定更合理的战略规划,将国家、社会及经济 等多方面的发展和科学技术的发展更紧密地结合起 来,优化资源配置,赢得科技竞争优势 [3,4]。在整 个评估过程中,对热点技术、前沿技术的识别和对 技术发展趋势的预测,是技术预见最为关心的问题, 引起了国内外学者的广泛关注 [5] 。
本文以机器人技术为研究对象,分析总结技术 热点、前沿识别及趋势分析的一般流程与基本思想, 分析的思想与流程对技术预见中相关问题的发展有 较强的促进作用和借鉴意义,分析的结果为专家提 出 2035 技术清单和规划产业战略布局提供了有力 的支持。
《二、研究现状》
二、研究现状
当前技术预见中的技术热点、前沿识别与趋势 分析主要针对专利数据,通过引证分析或聚类分析 等方法,运用一些指标来判定众多技术点中哪些是 热点和前沿技术,并对这些技术进行趋势分析。如 侯剑华等 [6] 利用关键词与被引量关系分析风力涡 轮机技术中的热点,栾春娟 [7] 基于高频次提取与 专利数量统计分析波音公司技术分布,黄鲁成等 [8] 用 CiteSpace 软件实现专利引用聚类并根据关键词 的出现频率、Burst 值等指标分析家用空调发展的 技术热点与前沿。常见的技术热点、前沿识别与趋 势分析的指标如下 [9] 。
(1)专利数量。即相同技术点的专利总数量, 反映了相应技术产业的发明活动的丰富程度。专 利数量越大,说明相应技术产业的发明活动越丰 富 [10]。
(2)技术成熟度系数 α。α = a/(a+b),其中 a表示当年发明专利申请量,b 表示当年实用新型专 利申请量。实用新型专利申请量比例的增多,表示 技术趋于成熟 [11]。
(3)技术衰老系数 β。β = (a+b)/(a+b+c),其中 a 表示当年发明专利申请量,b 表示当年实用新型 专利申请量,c 表示当年外观设计专利或商标申请 量。外观设计专利申请量比例的增多,表示技术 发展趋于停滞 [11] 。
(4)发明专利率。发明专利率 = 技术发明专利 总数量 / 该技术发明专利总数量,用于衡量技术发 展水平。该指标与技术成熟度系数的差异在于不用 考虑时间变化,对整体发展水平进行评价 [12]。
(5)技术生长率。技术生长率 = 该技术当年发 明专利数量 / 该技术追溯 5 年的发明专利数量。技 术生长率可以用来衡量技术活动发展的变化状况, 反映技术创新随时间的变化是迅速还是迟缓 [13]。
(6)美国授权量。优先权国家个数是美国的专 利总量,由于在美国申请专利的程序复杂,费用较 高,只有较高水平且能够产生与其经济成本相匹配 的技术成果才会在美国申请专利,故该指标反映了 该技术的技术含量的高低 [14]。
(7)当前影响指数 (CII)。CII = 某技术过去 5 年内的专利被当年专利引用的比率 / 所有专利被引 用的比率。该指标反映了该技术的影响力与领先程 度 [15]。
(8)技术影响力指标 (TII)。TII =(某技术当年 被引次数前 10 % 的专利件数 / 该技术当年专利数量) /(该技术被引次数前 10 % 专利件数 / 该技术所有 专利数量),比当前影响指数更能体现技术的领先程 度。指标越大,说明该技术的领先程度越高 [16]。
(9)技术力量(TS)。技术力量 = 当前影响指 数 × 专利数量。指标越高,说明该技术的技术力 量越强 [17]。
(10)技术独立性。技术独立性 = 技术专利自 引次数 / 技术点专利总被引次数,反映了该技术对 其他技术点依赖程度及其自主研发水平。技术独 立性指标越高,说明该技术对其他技术的依赖性 越低,自主研发水平越高 [18]。
(11)前向引文量。即专利的被引次数,衡量 该技术对后来技术发展的影响程度。指标越高,说 明该技术越重要 [19]。
(12)科学关联度。即专利引用科学文献的平均数量,反映该技术与科学研究的关联程度。指标 越大,说明技术创新与科学研究关联越紧密 [20]。
(13)Burst 值。Burst 值是将一个关键词在某 一个时间段出现的频次除以上个时间段出现的频 次,取这些比例中最大的值当作这一关键词代表的 研究方向的 Burst 值。如关键词 Pressure 在 2001 年 前出现的次数为 N1,2001―2005 年出现的次数为 N2, 2005―2010 出现的次数为 N3,则:Burst=Max ((N2/N1),(N3/N2));Burst 值反映了某一研究方向 的专利突然增多的程度,Burst 值越大,说明两时 间段内该方向的专利数量比例越大,反映了该方向 专利研究的热度。
除了使用指标体系评价技术发展外,现有技术 预见研究通常采用德尔菲法,在本次技术预见 2035 备选技术清单的第 1 轮制定过程中采用的便是德尔 菲法。但是单纯使用专家知识进行决策存在明显的 问题,如果技术专家知识有限,容易在一开始便形 成错误观点、预期或假设等偏差,结果可能使预见 分析难以收敛,最终导致无法有效支持决策。所以, 在专家分析与预见时,给专家提供可靠的诸如技术 发展指标的数据支持是十分必要的。
上述指标往往针对单一问题,如专利数量对技 术发明活动的丰富程度及生长率对技术发展速度都 有一定的描述能力。某一方面的特征,使得以往的 研究缺乏对诸多方面特征综合性的、系统性的分析。 所以,本研究综合常用的反映技术发展水平的多项 指标,形成表征技术发展水平的指标体系,综合多 方面的因素来识别技术热点与技术前沿,并对热点、 前沿技术的发展趋势作进一步的分析,将技术发展 地现状更加全面的展现在专家面前,使专家在进行 技术分析与预见时有更详细的参考,作出更准确的 判断。
《三、研究方法》
三、研究方法
为了使分析的结果能够对 2035 技术预见备 选技术清单中重要的技术提供支持与参考,并给 予专家一定的启发从而更好地补充、调整备选技 术清单,本研究采用了自主构建叙词表,统计关 键词频等一系列专利分析方法对机器人传感器技 术进行热点与前沿分析。在分析时,用专利数量、 CII、TII、美国授权量、TS 等指标来反映机器人技术的研究热度,用技术生长率、技术成熟度系 数、发明专利数量等指标来反映这一技术的技术前 沿性。研究的过程大致分为以下三步:数据获取, 技术主题划分,技术热点、前沿识别与趋势分析。 研究过程见图 1。
《图 1》

图 1 研究过程流程图
《(一)数据来源》
(一)数据来源
本文的研究数据来源于汤森路透公司的 TI (Thomson Innovation)数据库。TI 数据库收录了 DWPI(Derwent World Patents Index)数据库全部 专利以及来自全球 90 多个国家和地区的 8 000 万 篇专利信息,包含 PDF 全文原始数据和题录信息、 法律状态信息等深加工的数据,同时还收录了 INPADOC(International Patent Documentation Center) 法律状态信息。使用 TI 数据库中的数据作为数据 来源,能够保证数据的充分性与可靠性。
本研究根据“机器人”这一主题,制定了包含 336 条德温特手工代码、185 条专利分类号、53 个 关键词,并排除 19 条德温特手工代码、95 条专利 分类号的检索式。在 TI 数据库的检索框中输入检 索式,选择所有年份,即可获得TI数据库中包含“机 器人”主题的专利。合计检索到128 279条专利信息, 检索日期为 2016 年 3 月 15 日。
《(二)技术主题划分方法》
(二)技术主题划分方法
在专利分析中,往往采用专利分类号的方式划 分专利的技术主题。但专利分类号的划分标准与待 研究问题的划分标准之间容易出现偏差,如 “ 机器 人关节 ” 的相关专利很难与机器人领域的某一具体 技术联系在一起。故本研究采用自主构建叙词表的 方式划分机器人领域的技术主题。根据 2015 年中 国科学院 Journal Citation Reports(JCR)分区手册, 选取了机器人领域相关主题的唯一在 A 区的期刊The International Journal of Robotics Research,遍历 该期刊所有论文关键词,根据词频高低与技术宽 泛程度人工挑选了包含 118 个关键词的技术主题 叙词表。
在人工挑选的技术主题叙词表的基础上,遍历 所有专利信息,如果在专利的德温特摘要中出现了 叙词表中的词,则认为这条专利讲述的内容和这个 词相关,主要内容为描述这个词对应的技术点,那 么在这个技术点对应的专利下面加一,同时记录下 该词所在专利的公开时间、优先权国家和专利优先 权人等信息,供下一步分析使用。
《(三)热点、前沿识别及趋势分析》
(三)热点、前沿识别及趋势分析
1. 整体概况
通过在 128 279 条专利信息中查找是否包含关键 词,找到 33 220 条包含叙词表中关键词的专利信息, 之后的分析均是基于这 33 220 条专利信息。图 2 所示的是相关专利数量随时间变化的情况,可以看 出,1985 年开始出现少量专利,随着时间的增加, 专利数量逐步增多,在 1993 年前发展平缓,1993 年到 2009 年稳步上升,2009 到 2013 年增长较快, 2013 年专利数量达到顶峰,之后开始下降。由于专 利有 3 年的公示期,所以 2013 年之后的专利数量 是否下降仍有待进一步考察。总的来说,机器人领 域的专利数量总体处于上升趋势。
《图 2》

图 2 机器人领域相关专利的时间分布
2. 热点识别
了解机器人领域的技术热点,有助于明确机器 人技术中受关注的技术领域,把握机器人技术发展 现状,从而更好地进行技术研发布局。
机器人技术领域的专利数量、美国授权量、CII、 TS、TII、前向引文量、科学关联度指标反映了这一 领域的技术的成熟度以及研究的热度。对所有技术 点的各项指标按专利数量排序并取前 20 得到表 1。
《表 1》
表 1 热点技术前 20 项技术各指标

从表 1 中可以看出,机器人专利中关键词“运 动控制”出现的频次最高,相关专利数理较多,其 各项指标均较高,可以认为相关研究领域已经有了 一定的技术成熟度。紧随其后的热点词是“移动机 器人”,代表最近研究火热的移动机器人技术;“遥 控”的专利数量居第 3 位,它所代表的是远程控制 技术。“移动机器人”和“遥控”这两个领域的专 利数量也比较多,他们各自领域的技术也趋于成熟。 还有一些其他的关键词频次较高的技术领域,如“柔 性臂”和“位置控制”等,他们所包含的专利数量 也较多,但技术影响力指标却较低,各自领域的技 术成熟度还有待进一步的提高。
3. 前沿识别
了解机器人领域的技术前沿,有助于明确机器 人技术发展的新兴领域和前沿态势,把握机器人技 术研发动向,从而更好地进行技术研发布局。
机器人技术领域的专利变化率、技术生长率、 技术成熟度系数、发明专利率等指标反映了这一 领域的技术的发展状态,从而可以得知该技术领 域的前沿与发展趋势。对所有技术点的各项指标按 Burst 值排序取前 20 得到表 2。其中为了减少公示 期专利没有被统计的干扰,技术生长率等指标均按 2013 年计算。
《表 2》
表 2 前沿技术前 20 项技术各指标
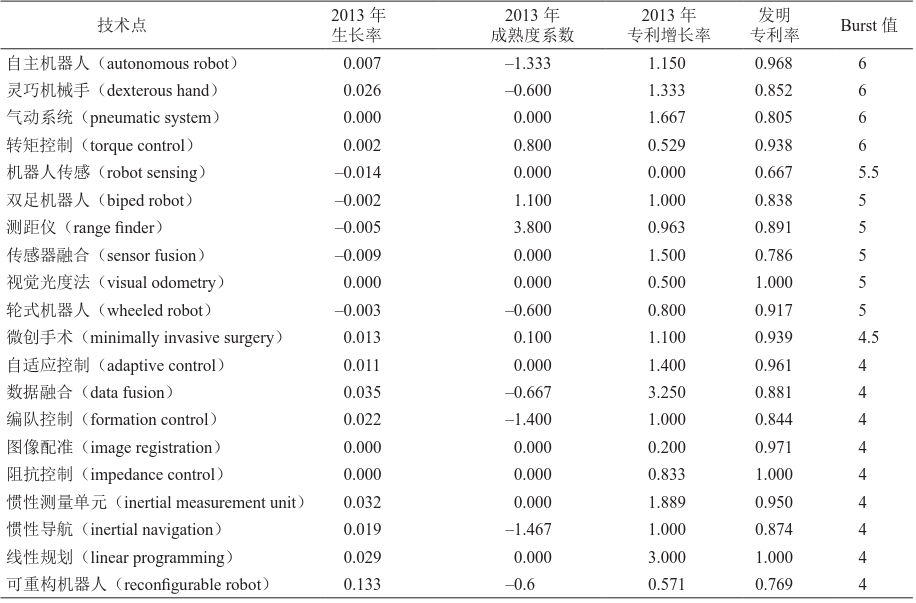
从表 2 中可以看出,机器人专利中“自主机器 人”的 Burst 值、发明专利率、专利增长率均较高,研究关注度增加较快,其各项指标均反映出该技术 仍处在发展阶段,可以认为相关研究领域是较前沿 的领域。紧随其后的热点词是“灵巧机械手”与“气 动系统”,这两个领域的 Burst 值也较高,各项指标 均反映出这些技术仍处在发展阶段,他们各自领域 的技术也是较前沿的领域。还有一些 Burst 值较高的 技术领域,如“测距仪”“双足机器人”等,虽然他 们 Burst 值较高,但技术生长率、专利增长率都不高; 技术成熟度系数高,说明这些技术曾经是前沿技术, 如今发展已经趋于成熟,不再是前沿技术。
4. 高频次技术领域趋势分析
为了分析高频次关键词对应的技术领域随着时 间变化的关系,我们选取了 5 个频次较高的关键词, 根据专利数量随时间变化和技术生长率随时间变化的关系分别绘制了图 3 和图 4。
《图 3》
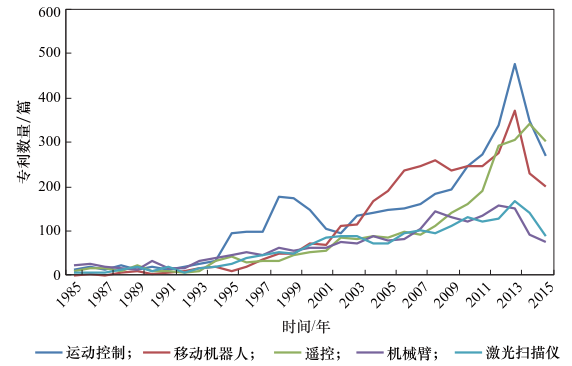
图 3 高频次技术领域专利数量随时间变化曲线图
《图 4》
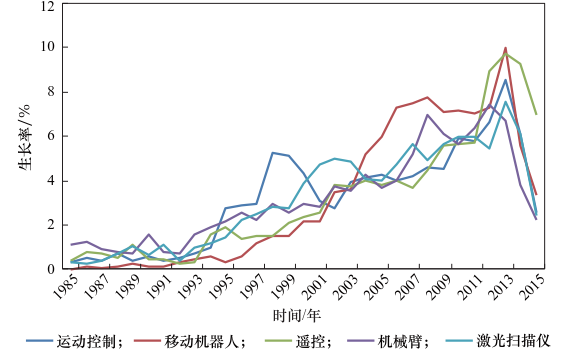
图 4 高频次技术领域生长率随时间变化曲线图
由图 3、图 4 可以看出,“运动控制”“移动机 器人”和“遥控”技术领域专利数量随时间变化的 趋势大致和机器人领域总的专利数量的变化趋势一 致,可以认为这些技术领域是机器人领域中较基础 的领域,发展趋势反映了机器人技术整体的发展情 况。“机械臂”和“激光扫描仪”技术从 1985 年开 始有专利产生,总的来说发展平缓。这些结论与 “1. 整体概况”中的结论相一致,进一步证明了这 些结论的合理性。
5. 高频次技术领域专利权人分布
为了分析高频次关键词对应的技术领域都掌握 在哪些公司手中,我们选取了 6 个频次较高的关键 词进行统计并得到表 3。
《表 3》
表 3 高频次技术领域专利权人分布

由表 3 可以看出,掌握这些基础技术与热点技 术的公司大多是日本的公司,如安川电机株式会社、 本田株式会社、佳能公司、丰田汽车公司等。可见 日本公司不光掌握了机器人的基础技术,也对热点 技术进行了深入的研究,是机器人技术方面的专利 大国。韩国的公司,如三星集团、乐金电子等也有 较多的专利,主要集中在“移动机器人”“遥控” 技术的研究上。这一结果证明了日本在机器人领域 的研发力量占有较大优势,韩国仅次于日本,在工 业机器人方面也具有较强的实力。
《四、机器人领域技术分析为 2035 技术清单的 提出提供支持》
四、机器人领域技术分析为 2035 技术清单的 提出提供支持
笔者将机器人领域专利分析的结果交与“中国工程科技 2035 发展战略研究”技术预见专家组参 考,得到专家们的认可与支持。在技术预见备选技 术清单的修改过程中,将本文的分析结果作为重要 的参考依据,为专家的分析判断提供了数据支持, 这种支持主要体现在以下两个方面。
一方面,本研究分析的结果对备选技术清单中 技术的重要性提供了支持与参考。通过技术热点、 前沿识别分析识别出的与专科手术机器人技术高度 相关的“微创手术”技术,与水下自主机器人技术 高度相关的“水下机器人”技术,与机器人自主行 为技术高度相关的“自主机器人”和“自适应控制” 技术,与基于生命 / 机电系统融合的新型感知技术 “人工肌肉”技术等技术点不仅对原本清单中的备 选技术的合理性提供了有力的支持,而且识别了相 关技术点下可能的子技术热点和前沿,为专家进一 步做出技术点下技术发展的描述与技术布局提供了 参考。
另一方面,本研究分析的结果启发了专家对备 选技术清单进行补充与调整。本研究方法识别出的 与空间探索机器人技术高度相关的技术热点“移动 机器人”“遥控”“行走机器人”与技术前沿“双足 机器人”“适应性控制”等技术点,充分的说明了空 间探索机器人技术发展的必要性与可行性;识别出 的与基于脑科学和脑认知的机器人技术高度相关的 技术热点“类人机器人”“神经网络”“传感器融合” 等,对基于脑科学和脑认知的机器人技术的发展前 景提供了较好的数据支持。受此启发,专家在制定 第 2 轮清单时将空间探索机器人技术与基于脑科学 和脑认知的机器人技术加入到备选技术清单中。表 4 是两轮备选技术清单的详细情况。
《表 4》
表 4 机器人两轮备选技术清单

《五、结语》
五、结语
本研究基于指标体系分析法,综合运用多重指 标,对机器人技术相关的专利进行统计分析,识别 出机器人技术中的技术热点和技术前沿,并对热点 和前沿技术进行了趋势分析,形成了技术热点、前 沿识别与趋势分析的一般流程,对相关领域的研究 有较好的促进作用。在技术预见备选技术清单的修 改过程中,将本文的分析结果作为重要的参考依据, 结合相关领域专家的经验,对第 1 轮备选清单作出 了调整。本研究提出的分析思想与流程对技术预见中的相关问题的发展有较强的促进作用和借鉴意 义,分析的结果为专家提出 2035 技术清单、规划 产业战略布局提供了有力的支持。
在对机器人领域专利分析的过程中,得到如下 结论。第一,从时间分布来看,机器人技术整体成 稳步发展态势。根据专利数量与时间的关系,利用 指标体系分析了机器人领域的“运动控制”“移动 机器人”等较基础的技术,“自助机器人”“灵巧机 械手”等新兴热点技术与“机器人操纵臂”“人工 肌肉”等有较大提升空间的技术。第二,从地区分 布来说,机器人相关技术主要集中在日本、韩国的 一些工业机器人企业手中,其中日本在机器人领域 的研发力量占有较大优势,韩国在机器人方面也具 有较强的实力。第三,对既是热点又是前沿的技术 进行了汇总分类,找出相对成熟的技术“运动控制” 与“移动机器人”,新兴的热点技术“自主机器人” 与“灵巧机械臂”,及仍有较大潜力的技术“机器 人操纵臂”与“人工肌肉”,并就这三类技术对企 业布局何种技术研发进行了浅显的分析。
为了更好地识别技术热点与前沿,未来还可以 基于 Web of Science 等论文数据库中的文献数据、 网络新闻、技术博客等网络数据与专利数据进行 对比分析,得出不同层面技术发展现状的差异与 联系,可能会对国家战略制定、企业布局研发更 有指导性。











 京公网安备 11010502051620号
京公网安备 11010502051620号




