

《1 引言》
1 引言
现代火箭炮控制系统的设计有以下 5 个方面的技术要求:响应快,控制精度高,无超调,抗干扰,控制策略简单易于实现。由于火箭炮位置伺服系统是一种负载变化大、冲击扰动力矩强的系统,采用传统 PID 控制无法满足其位置控制的高速、高精度以及射击精度的要求,往往无法达到理想的控制效果[1] ,需采用鲁棒控制理论。 20 世纪 80 年代初提出的以系统的  - 范数为性能指标的 H∞ 控制理论,是目前解决鲁棒控制问题比较成功且完善的理论体系,成为近 20 年来自动控制理论和工程研究的热门课题。目前,H∞ 控制无论从理论上还是应用上都趋于成熟[2] 。线性二次型最优控制是在 20 世纪 60 年代发展起来的一种设计方法,由于此方法计算容易,控制效果显著,所以应用十分广泛[3] 。笔者将 H∞ 控制理论与最优控制理论的优点加以结合,设计了鲁棒最优控制器。经实验验证,该控制器有效地克服了系统的模型不确定性和冲击力矩的影响,具有较好的鲁棒性、动态性能和静态控制精度,获得了满意的控制效果。
- 范数为性能指标的 H∞ 控制理论,是目前解决鲁棒控制问题比较成功且完善的理论体系,成为近 20 年来自动控制理论和工程研究的热门课题。目前,H∞ 控制无论从理论上还是应用上都趋于成熟[2] 。线性二次型最优控制是在 20 世纪 60 年代发展起来的一种设计方法,由于此方法计算容易,控制效果显著,所以应用十分广泛[3] 。笔者将 H∞ 控制理论与最优控制理论的优点加以结合,设计了鲁棒最优控制器。经实验验证,该控制器有效地克服了系统的模型不确定性和冲击力矩的影响,具有较好的鲁棒性、动态性能和静态控制精度,获得了满意的控制效果。
《2 基于旋转轴系的 PMSM 伺服系统的数学模型》
2 基于旋转轴系的 PMSM 伺服系统的数学模型
交流永磁同步电机的矢量控制也是一种基于磁场定向的控制策略,按照磁链定向控制方法可以分为 4 种控制方案:转子磁链定向控制、定子磁链定向控制、气隙磁链定向控制、阻尼磁链定向控制。在模型推导中,做了如下假设[4] :a. 忽略铁心饱和;b. 不计涡流和磁滞损耗;c. 转子上没有阻尼绕组,永磁体也没有阻尼作用;d. 反电动势是正弦的。
基于以上假设,可得在 d - q 旋转轴系下的状态方程:
 ( 1 )
( 1 )
式中 R 为绕组等效电阻;L 为等效电感;p 为电机磁极对数;ω 为转子机械角速度;ψr 为每对磁极磁通; Tl 为负载转矩;J 为折算到电机轴上的总转动惯量。
采用 id ≡ 0 的解耦控制,可得
 ( 2 )
( 2 )
取转角 θ 及角速度 ω 为状态变量,令

取输出为 Y =[ 0 1 ]  ,可建立交流永磁电机伺服系统的状态空间方程:
,可建立交流永磁电机伺服系统的状态空间方程:

这里 A 和 B 代表系统标称模型,传统控制方式是采用 PI 控制器与线性状态反馈控制器相结合的方法,利用传统控制理论求解控制器参数,虽然该方法在提高稳态精度和改善动态特性方面作用明显,但转子速度、转角误差使得交流同步电机线性化以后的实际模型相对于理论模型发生了摄动,因此该方法无法克服模型参数变化对性能的不利影响,即系统对参数摄动的鲁棒性较差。鲁棒控制可以大大提高系统的鲁棒性,但如果直接对位置伺服系统采用鲁棒控制,即按鲁棒控制思想为受控对象设计一个状态反馈控制器,系统的稳态精度将无法保证 [5] 。笔者结合最优控制理论和 H∞ 控制理论的优点,设计了一种鲁棒最优控制器,使具有参数摄动和外部干扰的交流位置系统具有良好的跟随特性,并给出了实验结果。
《3 控制器的设计》
3 控制器的设计
《3.1 系统的描述》
3.1 系统的描述
对于模型式(3),系统的不确定性主要表现在:a. 系统参数的建模误差;b. 系统参数的变化;c. 外界干扰的不确定性。
对于式(3)所描述的伺服系统,系统的控制任务是设计合适的跟踪控制器,满足

其中 xd2 为期望的角度输出信号,x2 为实际的角度输出信号。e2 为跟踪误差,而且在整个控制过程中系统对上述所描述的不确定性呈现强鲁棒性和高的跟踪精度。
为了实现上述控制任务,设计一个合理的鲁棒最优控制器,首先假设[6] :
1) 式(3)的标称系统是可以获得的,即式(3)中的矩阵 A,B1 的估计  ,
, 通过解析或辨识是可以获得的。
通过解析或辨识是可以获得的。
2) 控制增益 pψr/J 满足

3) 负载扰动 Tl 有界。
可见,对于式(3)所描述的伺服系统,上述假设可以实现。因此,式(3)可重写为

ΔΑ,ΔΒ表示摄动矩阵,且假设满足以下条件:

其中 E,Fa,Fb 为已知的定常阵; 为含有不确定因素的矩阵,且
为含有不确定因素的矩阵,且 
 I,I 为单位阵。
I,I 为单位阵。
《3.2 控制器设计》
3.2 控制器设计
对上述给定对象,设计控制器

使闭环系统满足:
1) 对于任意满足条件 I 的 ,闭环系统内稳定。
2) 对于任意满足条件 I 的 ,由 Tl 到 Y 的闭环传递函数  (s)满足
(s)满足

文献[7]给出了对于被控对象式(6),存在状态反馈控制器 K,使闭环系统满足 1,2 的充要条件及证明。
采用文献[8]中使用的二自由度控制器,如图 1 所示,P 为对象的实际模型,d 为外加干扰,K1 ,K2 , K3 为控制器,P0 为标称对象,输入为 r,输出为 y 。
《图1》
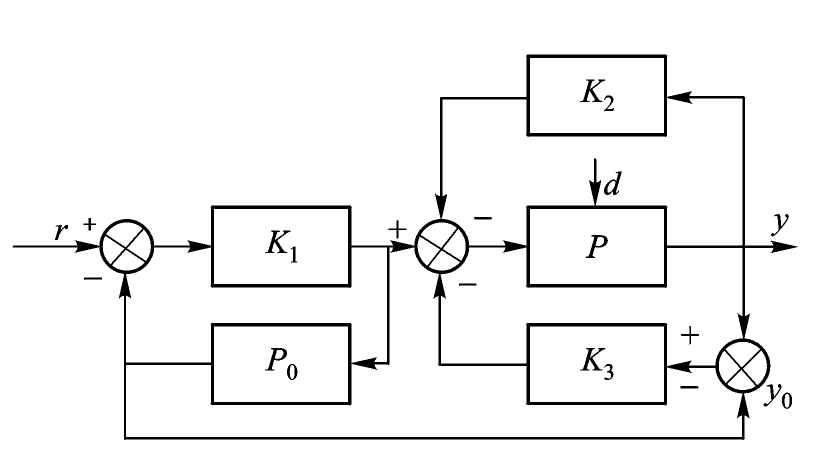
图1 鲁棒最优控制器结构
Fig.1 Structure of optimal robust controller
参数:电机及负载转动惯量折算到电机轴后总转动惯量 J = 8.63 × 10-3 kg · m2 ,p = 4,pψr = 0.64 Wb 。
根据以上参数得得 =  ,B2 =
,B2 =  。另取 ΔΑ =
。另取 ΔΑ =  ,
,
 1,ΔΒ =
1,ΔΒ =  ,E = 5I,=
,E = 5I,=  ,Fa =
,Fa =  ,Fb =
,Fb =  ,即可满足条件式(7)。先设计鲁棒控制器 K2,设评价函数
,即可满足条件式(7)。先设计鲁棒控制器 K2,设评价函数

取 C =  ,D =
,D =  ,满足 D T
,满足 D T  =
=  。使用求解MIs 的方法进行计算[8,9] ,即可求得 K2 = [ 11.8 0.001 ] 。
。使用求解MIs 的方法进行计算[8,9] ,即可求得 K2 = [ 11.8 0.001 ] 。
再设计最优控制器 K1 [8] ,对于 Riccati 方程 PA + ATP - PBR - 1 BTP + CTQC = 0,取 Q = 100,R = 1,得到 P =  。所以,K1 = R - 1BTP 可取为 [ 5.402 0.001 ] 。
。所以,K1 = R - 1BTP 可取为 [ 5.402 0.001 ] 。
K3 设计为常规 PID 控制器,其系数可以在对系统进行实时控制的过程中实时调整。
《4 软件设计》
4 软件设计
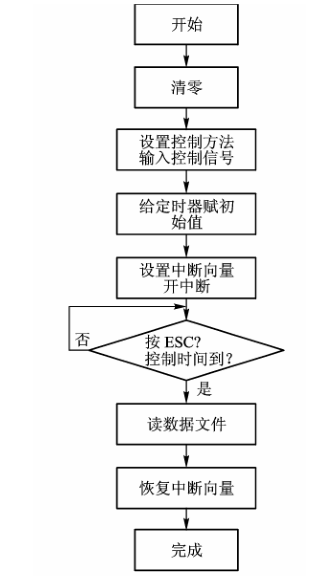
外部测控微机发出跟踪的目标位置信号,通过工控机检测测角元件的当前位置信号,再编制合适的控制算法对以上信号进行处理,经过 D/A 转换放大送到交流电机驱动器经功率放大后驱动电机,电机通过动力传动齿轮箱带动负载及安装在高精度小模数齿轮箱上的测角元件向期望的位置运动。负载是不断变化的,要求系统从空载到满载范围变化时满足性能指标要求。系统由驱动器自带的 A/D 转换部分进行数据采集,在工控机中完成控制算法并通过驱动器自带的 D/A 转换部分输出控制量 u 。系统的主程序框图及中断服务子程序框图分别如图 2 和图 3 所示。
《图2》

图2 主程序流程图
Fig.2 Flow chart of main procedure
《图3》

图3 中断服务子程序流程图
Fig.3 Flow chart of interrupt service sub-procedure
《5 实验研究》
5 实验研究
《5.1 实验装置》
5.1 实验装置
系统由控制部分、旋转变压器、交流伺服电机、驱动器、功率放大等部分组成。其中控制部分为工控机,控制对象为交流电机。系统工作原理:由 A/D 转换采集旋转变压器的反馈位置信号与期望输出值相比较得到误差值,经过计算来实现控制算法,并且经过 D/A 转换输出控制电压,最后经过功率放大驱动电机。
《5.2 实验结果分析》
5.2 实验结果分析
笔者在火箭炮随动装置上分别进行了基于鲁棒最优控制策略和常规 PID 控制策略的交流伺服系统试验研究,减速器减速比为 1∶231,等效阻力矩最大为 1255 N· m,负载最大等效转动惯量为 365 kg· m2 。负载最大速度为 50°/s,最大加速度为 40°/s2 。所研制的控制器的误差曲线如图 4 、图 5 所示,常规 PID 控制器的误差曲线如图 6 、图 7 所示。实验表明,采用所研制的控制器,系统 200 mil 阶跃响应误差 < 0.5 mil,等速 50°/s 误差 < 2 mil 。动、静态性能良好,而且无超调,整个系统工作稳定,控制效果好,满足了系统的要求。而采用常规 PID 控制器,系统 200 mil 阶跃响应误差 < 2 mil,等速 50°/s 误差 < 4 mil,效果明显比采用本文控制器差,不能较好地满足系统要求。
《图4》

图4 200 mil 阶跃响应误差曲线
Fig.4 200 mil step response error curve
《图5》

图5 等速(50°/s)误差响应曲线
Fig.5 Equivalent speed(50°/s) response error curve
《图6》
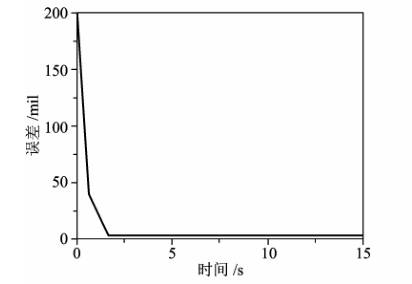
图6 200 mil 阶跃响应误差曲线
Fig.6 200 mil step response error curve
《图7》
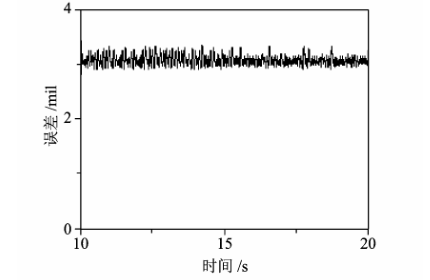
图7 等速(50°/s)误差响应曲线
Fig.7 Equivalent speed(50°/s) response error curve
《6 结论》
6 结论
为了满足火箭炮交流伺服系统的高速和高精度指标,提出了一种最优 H∞ 控制器。它结合了 H∞ 控制理论和最优控制理论的优点,不需要被控对象精确的数学模型,适应性强,控制效果显著。从实验结果可以看出,对具有强干扰的伺服系统,应用该鲁棒最优控制器后系统鲁棒性好,满足了系统的要求。该控制策略特别适用那些系统结构复杂、外部干扰大而且控制精度要求高的场合。











 京公网安备 11010502051620号
京公网安备 11010502051620号




