

《1 引言》
1 引言
常规的电力系统静态无功发生器(SVG,static var generator)的控制方案大多数是基于局部线性化控制,一般仅能够保证电力系统在运行点局域小范围内的稳定性。由于电力系统本身具有很强的非线性特征,当系统发生大扰动时,或在故障状态下运行点偏离正常值较远时,控制器性能会大大降低。
近年来,SVG 设计中采用和试验了经典、现代、非线性、智能、鲁棒等各种不同类型 SVG 控制方案,取得了一定效果。这些控制方案按照控制器对系统信息提取和综合的过程不同,分为基于系统内部和外部控制的两种方法[1] 。基于系统内部结构的控制方法有李雅普诺夫(Lyapunov)能量函数法[2] 、直接反馈线性化 DFL[3] 、逆系统方法[4] 、鲁棒控制[5] 等,这类控制方法的控制精度高,系统响应速度快,但均需要精确的数学模型,对电力系统内部建模要求非常高,仿真的结论和现场实际效果有较大差距。基于系统外部特征的控制方法,如 PID[6] 、模糊逻辑 [7] 、人工神经网络[8] 、遗传优化算法[9] 等,模拟了人类智慧,但对外部信息的获取要求较高,需要增加在线判断,完善获取外部信息手段。 SVG 控制器设计的发展方向,目前国内外学者倾向于采用非线性和人工智能控制相结合[10] 。
在复杂的非线性电力系统中,基于免疫算法的 STATCOM 稳定性控制[11] 、建模[12] 、电压无功综合控制[13] 、潮流计算[14] 的研究引起了广泛关注。笔者对于双闭环结构的 SVG 控制系统,提出一种基于类人体免疫反应模型(MHIRM,mimic humoral immune response model)的电压控制器控制策略,用于 SVG 外环控制,向内环执行机构发出保持系统电压稳定的指令,提供所需的无功功率参考值。
《2 生物免疫系统简要机理[15] 》
2 生物免疫系统简要机理[15]
生物免疫系统反应简要机理如图 1 所示。免疫反应主要由抗原识别、免疫细胞激活生成以及抗体产生 3 个阶段。当抗原反应细胞(ARC,antigen reactive cell)感受到抗原物质入侵后,如果捕获后识别的为类似人体内病变细胞等体内抗原物质时,将直接激活生成免疫 B 细胞;如果为类似移植器官细胞等体外抗原物质时,将会刺激产生 CD4 + T 胞,经过克隆或变异增生扩散,孕育成 TH 细胞,再激活生成 B 细胞,发生 I 类和 Ⅱ 类免疫应答,形成抗体 Ab 来杀死对人体有害的抗原物质。
《图1》
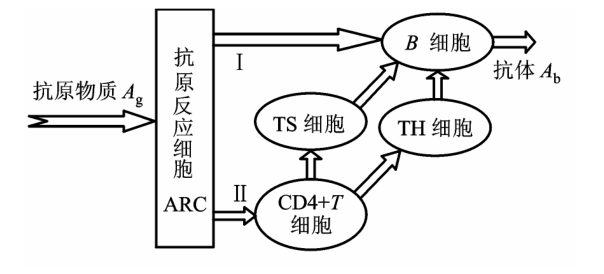
图1 生物免疫系统反应简要机理
Fig.1 Brief mechanism of biology immunity system
免疫系统提供了一种多样化机制,具有识别能力,能够对样本自动分类,利用学习、记忆、联想、恢复等方法,实现预定功能,形成了完善的机理,免疫系统具有更高的自治性,对训练样本的要求远低于神经网络,对类似于电力系统的复杂非线性系统具有更强的适应能力。
生物免疫系统抵御内外不利因素的恶性进入,维持本身功能正常的策略,用于 SVG 控制系统识别外部因素造成电压变动和内部因素影响的电压波动,排除干扰,保证预定的目标输出。
《3 SVG 的 MHIRM 控制策略》
3 SVG 的 MHIRM 控制策略
《3.1 基于 MHIRM 的电压控制器数学模型》
3.1 基于 MHIRM 的电压控制器数学模型
电力系统控制要求电网电压保持在设定值偏差 ± 5 % 的变动范围。电网电压主要受系统内部非线性因素和系统外部不确定偶发因素的影响,系统内部非线性因素主要由系统元件本身产生,使系统电压在某一数值上下瞬时波动或者稳态变动,而来自外部的不确定偶发因素则产生系统电压变动。把影响电压的两种因素等效成免疫系统的入侵抗原。在类人体免疫反应模型机理的基础上,试验一种新型的基于 MHIRM 的电压控制器用于 SVG 外环电压控制,通过电压误差的非线性映像,得到一个理想的算子,产生内环控制的无功指令信号。围绕着电压误差-无功的控制策略,MHIRM 的外环控制器数学模型如图 2 所示。
《图2》

图2 基于 MHIRM 的 SVG 电压控制数学模型
Fig.2 Math model for voltage control based on MHIRM
《3.2 ARC 对电压改变因素抗原物质的识别》
3.2 ARC 对电压改变因素抗原物质的识别
电压变动和波动的集合 UAG 相当于是各种入侵抗原物质,控制器中 ARC 抗原细胞单元的功能是识别出内外部因素,ARC 单元输出 3 个信号:e 表示内部因素产生的电压波动;x 表示产生的电压变动,IO 为区分内外因素变动的标志,IO = 1 表示内部非线性因素引起电压变动的自身抗原入侵,IO = 0 指外部不确定偶发因素引起电压变动的非自身抗原入侵。 ARC 输出由



确定,式中 UA 和 UAref 分别表示 SVG 接入点的实际电压值和设定电压值,(UA - UAref)表示电压波动值,UG 表示电压偏离标么值的大小,延时后依然存在的(UG - 1)代表了产生的电压变动。计时累计变量 Ct 表示延时一段时间后是否有外部不确定偶发因素影响电压的变动。 Ct 的初始值为 0,以下 5 条规则模拟了免疫反映的识别自身和非自身抗原功能,规则中 ΔT 是系统规定的电压暂态小时间增量, 表示赋值,UG(0)为 UG 初始值。
表示赋值,UG(0)为 UG 初始值。
规则 1 if x > 0 then + 1 Ct and if x < 0 then - 1 Ct;
规则 2 if Ct > 0 then Ct + Δt Ct and if Ct < 0 then Ct - Δt Ct;
规则 3 if Ct < ΔT and | x | > 0 then 1 IO;
规则 4 if Ct ≠ 0 and IO = 1 then if { Ct = 1 and UG < UG ( 0 ) then 0 IO;
if Ct = -1 and UG > UG ( 0 ) then 0 Ct 0 IO }
规则 5 if Ct = 0 and IO = 0 then UG UG ( 0 ) 。
《3.3 免疫细胞激活过程的模糊建模和求解》
3.3 免疫细胞激活过程的模糊建模和求解
Ⅰ类免疫应答直接激活生成 B 细胞,Ⅱ 类免疫应答需要先生成 CD4 + T 细胞,再发育(KCD)产生克隆和变异,形成 TH 细胞和抑制 TH 细胞的 TS 细胞。生物经过长期的进化,免疫系统臻于完善。作者试验仿生免疫机理,探索最佳 SVG 控制算子、建模和求解方案。求解方案分为模糊化、模糊推理和解模糊 3 部分,并使用 Lyapunov 函数、Mamdani 模糊推理和重心中心解模糊方法求解。
细胞的克隆和变异数量、速率用变量 k 及其变化率  描述,输出 Vf(FS,FH)是关于 k 和 的非线性函数,克隆和变异模型的目的是确定模糊过程输出 Vf,并保证系统平衡点(k,)=(0,0)是渐进稳定的平衡点。取 μPI(x)和 μNI(x)分别是 k 和 为正和负时的模糊隶属函数:
描述,输出 Vf(FS,FH)是关于 k 和 的非线性函数,克隆和变异模型的目的是确定模糊过程输出 Vf,并保证系统平衡点(k,)=(0,0)是渐进稳定的平衡点。取 μPI(x)和 μNI(x)分别是 k 和 为正和负时的模糊隶属函数:

由 Lyapunov 能量稳定性[2] 可得

根据免疫学理论知 CD4 + T 细胞克隆或变异模糊过程的  与其输出 Vf 成线性比例关系[16] ,即
与其输出 Vf 成线性比例关系[16] ,即

由式(4)至式(6)推导出克隆和变异过程的 4 条模糊规则。
if k 为正值,且 为正 then Vf 为负大;
if k 为负值,且 为负 then Vf 为正大;
if k 为正值,且 为负 then Vf 为零;
if k 为负值,且 为正 then Vf 为零。
对输出变量解模糊采用:

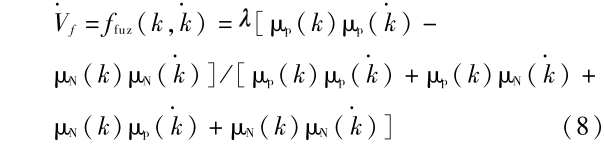
式中相应的 μP(k),μN(k)分别 Vf 为正和负的模糊隶属函数, 是输出控制参数。最后由 Mamdani 模糊推理和重心中心解模糊方法[2] 得到的 CD4 + T 细胞克隆或变异模糊过程的输出为
是输出控制参数。最后由 Mamdani 模糊推理和重心中心解模糊方法[2] 得到的 CD4 + T 细胞克隆或变异模糊过程的输出为
《3.4 免疫抗体的产生》
3.4 免疫抗体的产生
CD4 + T 细胞的克隆或变异的结果生成 TS 和 TH 细胞,免疫细胞将经过一个发育成熟的过程( KB),然后分化成一些具有抵抗力量的免疫分子———抗体 Ag 来指挥人体内协调机构达到平衡,在基于 MHIRM 的 SVG 外环控制器中,抗体 Ag 也就是内环控制的无功指令信号 u * 。扩散增生激活生成免疫 B 细胞过程由下列细胞生长函数模型决定[16] :

式中 Pg,PS ,Pb,Pd 分别代表扩散增生细胞的生长率、饱和率、出生率和死亡率,它们的取值在外环控制器参数的训练中调整确定。对应人体内抗体 Ag 向 SVG 内环控制的无功指令信号为

《4 控制器参数学习算法》
4 控制器参数学习算法
《4.1 学习的 P 型迭代算法》
4.1 学习的 P 型迭代算法
控制器设计是通过确定合适的参数,使电压控制器的控制作用和生物体的体液免疫应答作用相似,从而极小化或消除在控制器装设点所出现的电压越限。基于 MHIRM 的 SVG 电压控制器参数,通过在离线数字仿真中引入虚拟无功负荷、模拟母线所出现的电压波动和越限学习来实现。这里仅简述 2 个参数的学习方法。
为式(7)和式(8)中 μP(k),μN(k)的模糊隶属函数和 Vf 的待定控制参数。仿真调试中因为学习的目标仅要求电压稳定在约束范围,其值并不要求十分精确,因此采用简捷的 P 型迭代算法。
1) 训练开始 设定初始值 Ug(0)> 1.05 或者 Ug(0)< 0.95 。
2) 学习过程 (i + 1)=(i)+ η(i)·[UGref(i - 1)- UGf(i - 1)] ,式中 η( i)是第 i 步学习参考信号,取值参考[UGref(i - 1)- UGf(i - 1)] 之差值,由经验值决定。
3) 学习停止 电压变动值变小,UG 在系统电压变动允许范围之内,0.95 < UG < 1.05,学习停止。
《4.2 KB 的强化学习算法》
4.2 KB 的强化学习算法
控制器主要目标是减少 SVG 接入点和邻域的电压波动。系统最重要的放大增益 KB 取值必须兼顾电网很高的动态性能和稳定性指标。学习中使用强化算法:
1) 首先根据电压控制精度 AV 和学习偏差的要求赋值给第 i 步的评价函数 AS(i):
 ( 11 )
( 11 )
 ( 12 )
( 12 )
2) 学习步骤

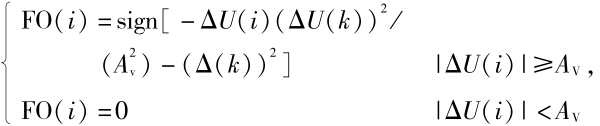
3) 对学习过程的学习率,采用如下优化:

式中  (i)= 3KB (i)- 3KB(i - 1)+ KB(i - 2)为标准的 3 阶学习预测模型。参数 KB 学习中第 i 步的学习率是 ρ(i),学习偏差是 ΔU(i),学习参考信号是 UAref(i),ρ(0)= 0 。如果学习的偏差为正,那么学习率必须为负,取值为评价函数本身,使学习向好的方向发展;如果学习的偏差为负,表明学习正在向好的方向发展,此时学习率取评价函数 AS(i)和学习预测模型 (i)的较大者,这样使学习率取得较大的权重,学习得到优化。
(i)= 3KB (i)- 3KB(i - 1)+ KB(i - 2)为标准的 3 阶学习预测模型。参数 KB 学习中第 i 步的学习率是 ρ(i),学习偏差是 ΔU(i),学习参考信号是 UAref(i),ρ(0)= 0 。如果学习的偏差为正,那么学习率必须为负,取值为评价函数本身,使学习向好的方向发展;如果学习的偏差为负,表明学习正在向好的方向发展,此时学习率取评价函数 AS(i)和学习预测模型 (i)的较大者,这样使学习率取得较大的权重,学习得到优化。
4) 学习停止。算法的停止信号是电压和无功控制精度 AV 达到设定的要求。
5) 为了保证控制器的动态性能,学习过程中对学习时间限制,以保证能够在限定的时间内有效地消除和减小电压波动。如果学习时间超越限定最长时间 T 仍然无法消除电压波动,则按下述方式开始新一轮的学习过程。
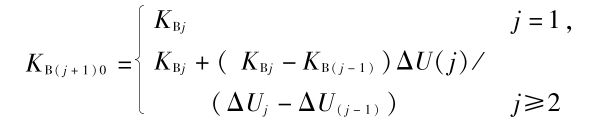 ( 15 )
( 15 )
式中 j 为学习过程的编号,KBj,ΔU(j)分别为第 j 步学习过程参数 KB 及学习误差的终值,KB(j + 1)0 为 j + 1 步 KB 初始值。
《5 仿真方案和结果》
5 仿真方案和结果
《5.1 仿真方案》
5.1 仿真方案
仿真试验中,电力系统为单机 SVG 控制器,采用双闭环控制,整体控制框图如图 3,包含 SVG 的单机电力系统结构图如图 4 。外环控制器主要对系统电压稳定性控制,完成内环控制所需要的无功功率参考值的功能,内环控制器的任务是产生一个同步驱动信号,在变流器输出电流和无功指令之间建立一种线性关系。
《图3》
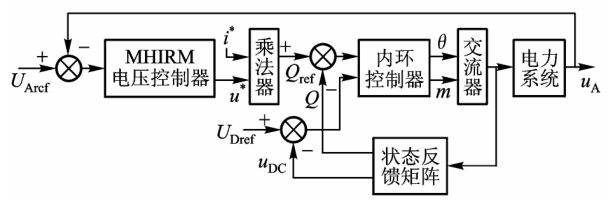
图3 SVG 整体控制框图
Fig.3 Integer control scheme
《图4》

图4 单机电力系统结构图
Fig.4 Chip set power system structure scheme
《5.2 三相对称短路故障仿真》
5.2 三相对称短路故障仿真
设定交流电网的额定电压等级 10 kV,SVG 的额定容量为 ± 30 MVA,直流电容电压为 4 kV,SVG 系统在 0.1 s 投运,1.5 s 后发生三相对称短路故障,2.5 s 故障后解除,仿真运行结果如图 5 。
《图5》
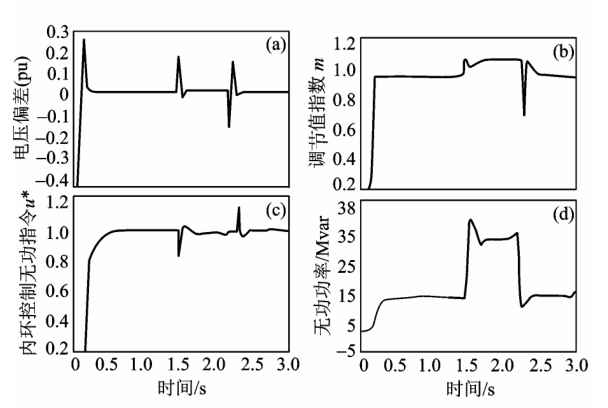
图5 仿真运行结果
Fig.5 Simulation running result
仿真行结果表明系统响应速度很快,外环输出信号 u * 迅速跟踪了系统的启动、故障发生和切除,向内环执行机构发出指令,使系统 0.5 s 内达到稳态,当 1.5 s 发生短路故障时,SVG 通过补偿故障引起的无功急剧不平衡,调节无功功率调节值指令,使其基本达到最大值 1,使接入点母线电压稳定,1 s 后解除短路故障,系统经过短暂跳变后恢复短路前状态。稳态时 SVG 发出无功功率 8 Mvar,系统母线电压接近额定电压 10 kV 。
《5.3 系统改变参数条件下和 PI 控制效果比较》
5.3 系统改变参数条件下和 PI 控制效果比较
为比较系统在参数发生非线性变化条件下和 PI 控制方式的不同控制效果,在上述仿真模型基础上,对系统线路的仿真参数随机做一些改动,令 x1 = 0.8,x2 = 0.1,xA = 0.35,取 PI 控制时效果最佳的控制参数 KP = 0.82,KI = 0.41,接入点系统仿真结果如图 6 。图 6a 和图 6b 为参数改变前 PI 控制,图 6c 和图 6d 为参数改变后 PI 控制,图 6e 和图 6f 为参数改变后采用 MHIRM 控制策略的母线电压和无功功率响应仿真结果。
《图6》
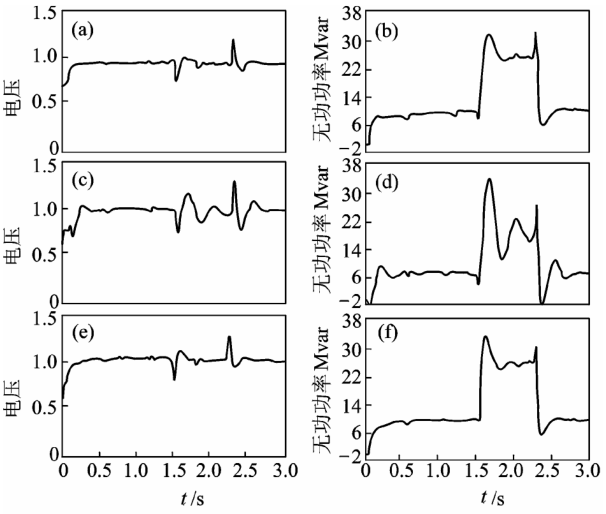
图6 系统改变参数条件下与 PI 控制果比较
Fig.6 simulation control result compare with PI in changing parameter
与 PI 控制方式相比,采用 MHIRM 控制策略方式的母线电压和无功功率响应速度约快 0.2 s,达到稳态后控制精度约为 0.97,比 0.98 低,比较故障发生时的动态调节的最大超调量,PI 控制方式约为 22 %,MHIRM 控制策略方式为 17 % 。
《5.4 KB 增强学习过程结果》
5.4 KB 增强学习过程结果
以新英格兰电力系统为例[17] ,分别在母线 8 和母线 14 装设 SVG,采用免疫电压控制器学习算法,确定在母线 8 和母线 14 装设 SVG 的参数 KB 时所注入的虚拟无功负荷及所引起的电压波动。
取训练精度 AV = 0.001,每轮训练过程允许时间为 2 s,在第 5 轮学习过程中即找到合适参数值。学习过程中 KB 的初值和终值如表 1 所示。装设在母线 8 的 KB 增强学习过程如图 7 所示。
《表1》
表1 KB 在学习过程中的初值和终值
Table1 The initial and the end value of KB at the learning process

《图7》
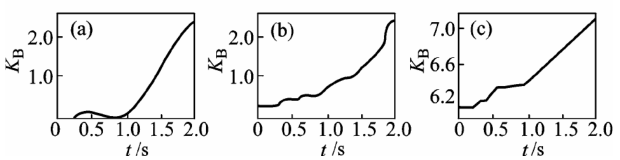
图7 装设在母线 8 的 SVG 的 KB 增强学习过程
Fig.7 KB training for the install at node 8
《6 结论》
6 结论
基于人工免疫算法的 SVG 电压控制器,针对高维非线性的电力系统控制对象,模拟人体免疫系统产生抗体杀死抗原,抵御内外不利因素的恶性侵入,保持人体内环境康健过程。以 SVG 控制器接入点电压误差作为系统的抗原侵入,通过对样本采集、分类、学习,识别内部和外部因素造成电压误差的成因,向内环控制器发出了保持系统电压稳定的无功指令信号,有效地增加对电力系统稳定性的控制。
仿真结果表明,在系统发生故障的条件下,装置能充分发挥控制调节作用,故障发生时使得系统母线电压得到保持,与采用常规的 PI 控制方式比较,响应速度快、动态超调量小、稳态精度高。所提出的系统动态模型对于研究 SVG 动态无功的调节和对电力系统稳定性的控制作用是有效的。充分考虑到控制对象的非线性,使设计的控制器具有较强的自适应控制能力,可提高控制器的综合性能,增强了对电力系统稳定性的控制,对类似于电力系统这样的复杂非线性系统也具有较强的适应能力。











 京公网安备 11010502051620号
京公网安备 11010502051620号




