

《1 引言》
1 引言
并联式六自由度平台是20世纪60年代由 Stewart D.提出并研制的,与传统的串联式多自 由度运动机构相比,它具有承载能力强,刚度好, 无积累误差,精度高等优点,近年来被广泛地应用 于飞行模拟器、机器人、娱乐机、并联机床等行 业。直到现在,并联式六自由度平台在工业上还未 得到广泛应用,其主要原因:运动学问题,特别是 运动学正问题还没得到很好的解决;动力学问题没有解决;平台各分支间的耦合干扰难于消除。
笔者以六自由度运动平台为研究对象,从运动 学、动力学及控制方法的角度出发,解决其存在问 题,为六自由度运动平台的实用化奠定基础。
《2 并联式六自由度平台结构及其数学模型》
2 并联式六自由度平台结构及其数学模型
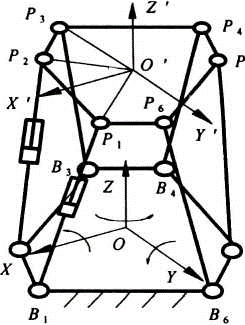
常用的并联式六自由度平台结构简图如图1 所示,主要由上平台、基础、液压缸、万向较及虎 克校组成。上平台与基座之间由直线运动副——6 个(图1中只绘出2个)液压缸连接,通过液压缸 的直线运动实现上平台的6个自由度的空间姿态 (上下、左右、前后、俯仰、横滚和偏航)。
《图1》

图1 并联式六自由度运动平台结构简图
Fig. 1 Structure diagram of six degrees of freedom parallel platform
为求解六自由度平台的空间位置关系,首先在 上平台和基座上建立静、动两坐标系O-XYZ和O'-X'Y'Z'。静坐标系原点O位于基础表面分布 圆中心,X-Y平面与基础上各校接点组成的平 面共面,各轴方向如图1所示。动坐标系原点O' 位于平台中心,当平台在中位时,动静坐标系各坐 标轴方向一致,且动坐标系Z穿过静坐标系原点。
设动坐标系中的各校接点相对于静坐标系原点的矢量为Pi(i=1,2,...,6), 原点的矢量为P'i(i=1,2,...,6),静坐标系各铰接点的矢量为Bi(i=1,2,...,6),平台按以下次序动作:偏航角θz一俯仰角θy一横滚角θx.一平移(xp,yp,zp)。此时6个驱动器杆长矢量li(i=1,2,...,6)在固定坐标系中可表示为:
\(l_{i}=P_{i}-B_{i}, \quad i=1,2, \cdots, 6\) (1)
其中:
\(\begin{array}{c}P_{i}=\left[\begin{array}{ccc}1 & 0 & 0 \\0 & \cos \theta_{x} & -\sin \theta_{x} \\0 & \sin \theta_{x} & \cos \theta_{x}\end{array}\right]\left[\begin{array}{ccc}\cos \theta_{y} & 0 & \sin \theta_{y} \\0 & 1 & 0 \\-\sin \theta_{y} & 0 & \cos \theta_{y}\end{array}\right] . \\{\left[\begin{array}{ccc}\cos \theta_{z} & -\sin \theta_{z} & 0 \\\sin \theta_{z} & \cos \theta_{z} & 0 \\0 & 0 & 1\end{array}\right] P_{i}^{\prime}+\left[\begin{array}{l}x_{\mathrm{p}} \\y_{\mathrm{p}} \\z_{\mathrm{p}}\end{array}\right] }\end{array}\)。(2)
式(1)即为六自由度平台位置逆解的基本公式。当已知平台的尺寸参数和上平台的位置指令时,由式(1)可求出驱动器的伸缩量。
平台的位置正解方法目前有两种:解析法和数值法。解析法是封闭解,可得到所有解,且不需要选定平台位置的初始值,但由于上平台的位置和6个杆长的关系昌非线性,要得到解析解十分困难,除特殊平台机构外,还未达到实用的地步[1,2]。
数值解法是利用平台的位置与各杆长的非线性方程组,用追代法或优化法进行位置正解,具有实用性。
《3 动力学耦合问题》
3 动力学耦合问题
笔者采用拉格朗日法建立六自由度平台的动力学模型。
拉格朗日函数为:
\(L(q, \dot{q})=K-P\), (3)
式中q为平台的广义坐标;K为系统动能;P为系统势能。
系统的动力学方程为:
\(\frac{\mathrm{d}}{\mathrm{d} t} \frac{\partial L}{\partial q_{i}}-\frac{\partial L}{\partial q_{i}}=Q_{i}\) (4)
Qi为相对于系统广义坐标的广义力。
由虚功原理
\(\boldsymbol{Q}_{\boldsymbol{i}}=\boldsymbol{J}^{\mathrm{T}} \boldsymbol{F}+\boldsymbol{F}_{\mathrm{ext}}\),
式中为油缸所需的输出力;Fex为系统外力。
在建立六自由度平台的动力学方程中,假设:a. 不考虑摩擦力;b. 液压缸质量与负载质量相比可忽略;c.平台所受外力为零。
由式(3)和式(4)可建立平台的动力学方程:\(\begin{array}{l}\boldsymbol{M}(X) \ddot{X}+V_{\mathrm{m}}(X, \dot{X}) \dot{X}+\boldsymbol{G}(\boldsymbol{X})=\boldsymbol{J}^{\mathrm{T}} \boldsymbol{F},\\\text { 其中, } \boldsymbol{M}(X)=\left[\begin{array}{cccccc}m & 0 & 0 & 0 & 0 & 0 \\0 & m & 0 & 0 & 0 & 0 \\0 & 0 & m & 0 & 0 & 0 \\0 & 0 & 0 & I_{x} & 0 & -I_{x} s \theta_{y} \\0 & 0 & 0 & 0 & I_{y} C^{2} \theta_{x}+I_{z} s^{2} \theta_{x} & \left(I_{y}-I_{z}\right) s \theta_{x} c \theta x c \theta_{y} \\0 & 0 & 0 & -I_{x} s \theta_{y} & \left(I_{y}-I_{z}\right) s \theta_{x} c \theta & I_{x} s^{2} \theta_{y}+I_{y} s^{2} \theta_{x} c^{2} \theta_{y}+I_{z} c^{2} \theta_{x} c^{2} \theta_{y}\end{array}\right]\\V_{\mathrm{m}}(X, \dot{X})=\sum_{k=1}^{6}\left(\frac{\partial M_{i j}}{\partial X(k)}-\frac{1}{2} \frac{\partial M_{j k}}{\partial X(i)}\right) \dot{X}(k),\end{array}\)
式中G(X)为平台的重力矩阵,M为平台的质量矩阵,X为n维输入状态空间。
从以上分析可看出,各液压缸的负载是运动轨迹、速度、加速度的函数,而不是一常量。
《4 基于神经网络的复合控制》
4 基于神经网络的复合控制
神经网络控制是近年来国际学术界异常活既的研究方向,神经网络以其高度的非线性映射、特有的联想记忆、在线学习和优化等功能,使其在控制领域得到了广泛的应用[3, 4]。
CMAC(cerebellar model articulation controller)神经网络采用局部学习的网络结构,能克服多层前传网络学习慢的缺点,特别适用于快速系统.
CMAC[5,6]结构.是仿照小脑如何控制肢体运动的原理而建立的神经网络模型,其实质是一种查表方法,结构简单,易于实现,.具有学习能力和自适应能力,同时还具有一定的泛化能力。
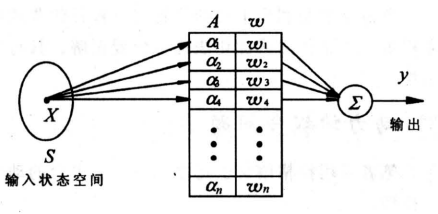
其结构简图如图2所示。它的输入输出关系为y=g(X)。这一关系由以下两个映射完成:
\(\begin{array}{ll}f: X \rightarrow A & \text { 即 } \alpha=S(X), \\g: A \rightarrow y & \text { 即 } y=w \cdot \alpha \text { 。 }\end{array}\)
其中f为输入空间到权空间的映射,X为n维输
《图2》

图2 CMAC结构原理图
Fig. 2 Schematic diagram of CMAC
入状态空间,w为权存储空间,y为输出,a是根 维相联空间A中的向量。a的元素只取1和0。对 于某个特定的X只有少数元素为1,其余为0,因 此在一次数据训练中只有少量的权需进行调整。正 由于此,CMAC才具有较快的学习速度。非零元 素的个数称为泛化尺寸(genelization size)。CMAC 网络的设计原则是输入空间比较相近的矢量在输出 空间也比较相近,即输入空间S在A中具有联想 特性。A空间的地址是一个虚地址,如果输入矢 量的维数较少,虚地址可与物理地址一一对应;当 输入维数很高时,相联空间A的维数将很大,这 时CMAC所需的内存将很大,为方便网络的物理 实现,可采用哈希编码(Hash-coding )的方法, 将A映射到一个维数小得多的空间A'。
CMAC的学习方法采用B学习算法,描述为:
\(\begin{aligned}w(k) &=w(k-1)+\Delta w \\\Delta w &=\eta\left(d_{i}-y_{i}\right) / n_{\mathrm{g}}\end{aligned}\)
式中\(\Delta w\)为权修正量,\(\eta\)为学习率,yi为系统响应,di为系统输入信号,ng为泛化尺寸。
复合控制是指在反馈控制的基础上,引入控制 信号的微分(一般为1阶、2阶微分)作为系统的 附加输入而实现的。这种包括反馈和前馈的复合控 制可以使系统的跟踪精度和动态特性大为提高。
但是,由于在电液伺服系统中,在系统模型未 知的情况下,前馈环节的选取比较困难,尤其是阀 控缸通常为一5阶系统,为实现完全补偿前馈环节 应取其为高阶微分环节,物理实现非常困难,比较 实际的做法是取其为1阶或比例项,而且前馈参数 的确定也有一定的困难,只能靠经验或试凑选取, 因此补偿效果难以保证。
综上所述,前馈环节的引入能够在不危及系统 稳定性的情况下极大提高系统的动态特性和跟踪精 度。但由于系统模型未知,前馈环节参数难以选 取。考虑到神经网络具有较强的非线性逼近能力和 较强的自学习能力,同时考虑CMAC学习的快速 性,选择CMAC神经网络作为前馈环节,以期提 高复合控制的补偿效果。
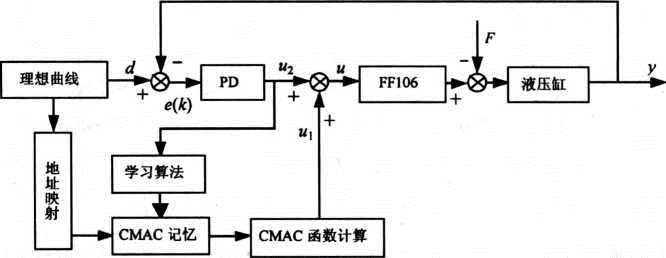
基于CMAC的复合控制的结构框图见图3。
《图3》

图3 基于CMAC的复合控制结构框图
Fig. 3 Schematic diagram of compound control based CMAC
其学习算法为:
\(w(k)=w(k-1)+\Delta w\),
\(\Delta w=\eta u_{2} / n_{\mathrm{g}}\),
其中,u1为CMAC控制器的输出,u2为常规控制器的输出。
《5 仿真研究》
5 仿真研究
六自由度平台的结构参数如下:负载质量m=1000kg,上平台半径r1=0.6m;下平台半径r2=0.8m; Ix=20kg*m2; Iy = 20kg*m2;Iz=40kg*m2。
液压缸的相关参数为:
面积比δ=0.51;无杆腔面积A1=0.007845m2;流量压力系数K=6x10-12m5/N·s;内泄系数Cic=5.4X10-11m5/N·s,外漆系数C∝=5.4 x 10-11m5/N·s,液压弹性模量βe=690MPa;额定压力Ps=8MPa。
伺服阀采用FF106流量阀,ξv=0.6;ωv=45Hz;额定流量100 Imin额定压力21MPa;额定电流40mA
CMAC神经网络权存傅空间大小nw=5000,泛化尺寸ng=21,输入维数为2,输入变量分别为e(k),e(k-1)。
在位置正解中,取迭代精度为1x10-5m,N=5。
图4为平台的运动轨迹:在X方向,运动频率为0.2Hz,幅值为0.02m的正弦曲线;俯仰角幅值为20°,频率为0.2Hz的正弦曲线;其余方向的速度、加速度保持为零,其余量保持在中位。图4a为通过位置反解得到的各杆长的变化曲线;图4b为各阀控缸系统在CMAC神经网络控制下的路除曲线;图4c是各缸在此运动轨迹下所受的负载力,图中曲线1,2,...,6代表6个液压缸。图4d是经过位置正解得到的平台的运动响应曲线,各小图中1代表俯仰角的指令曲线,2为响应正解曲线,3为X方向的挂令曲线,4为响应正解曲线。由图4可知,文中所做的运动学、动力学分析是正确的,控制方法是有效的。
《图4》

图4 运动学、动力学及控制仿真曲线
Fig. 4 Simulating curves of kinematics, kinetics and control
《6 实验》
6 实验
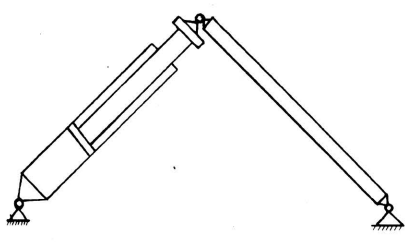
由于飞行模拟器的6个子系统完全相似,因此 文中以其中一个阀控缸电液位置伺服系统为研究对 象。为真实模拟阀控缸在六自由度运动仿真平台中 的工作环境,在单通道实验中,采用变负载机构, 其结构原理图如图5所示。
其中作动器采用自行设计的双圆锥静压伺服油 缸,行程1 m,最大摩擦力小于100 N;伺服阀采 用FF106流量阀,额定流量为100 1/min,额定压 力21Mpa;位置传感器采用WY-100型磁致伸 缩式位移传感器,其有效行程为1m,位置重复精 度为±0.1 mm;采用计算机完成控制作用的计算、 数据采集、图形显示等;油源压力为10 MPa。实
《图5 》

图5 单通道运动系统变负载结构简图
Fig.5 Diagram of varied load of single channel
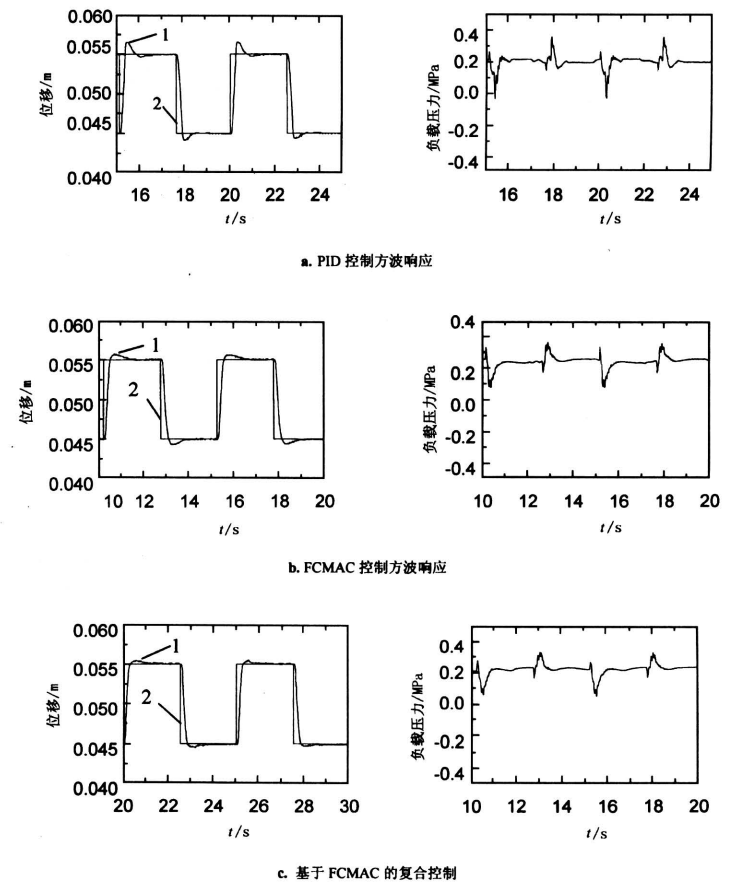
验结果如图6所示,其中曲线1为响应信号,曲线2为指令信号。从实验曲线可看出,系统响应经过四五个周期的学习效果就已经非常好了。这表明所提出的控制算法是有效的。
由图6可看出,对称四通闻控制非对称静压油缸表现出非对称特性,PID控制对此无能为力而采取CMAC可以消弱这种非对称的影响,提高系统的性能。与PID控制相比,CMAC控制通过学习系统的特性,基本消除了非对称的影响,表明CMAC控制器具有自适应功能。而基于CMAC的复合控制可进一步提高系统的性能。(下转第71页)
《图6》

图6 不同控制方法的方波响应及负载压力曲线
Fig.6 Rectangle response with different control schemes and curves of load pressure
同时,CMAC控制时负载压力的波动也较PID控制时小,这对飞行模拟器尤为重要。
《7 结论》
7 结论
从以上的理论分析和仿真研究结果,可得出以下结论:
1) 文中所做的位置分析.运动学.动力学分析是正确的;
2) 各油缸所受的负载力是与平台的运动轨迹有关的,是一变量;
3) CMAC神经网络具有较快的学习速度,良好的抗负载扰动能力以及较强的鲁棒性,适用于六自由度平台电液位置伺服系统。











 京公网安备 11010502051620号
京公网安备 11010502051620号




