

1 引言
OFDM (正交频分复用) 技术由于其潜在的抗多径衰落及高速数据传输能力、高的频带利用率等特点, 已经在众多信息传输系统中得到应用
为实现信号的相干解调, OFDM中需要使用信道估计技术来估计信道状态信息 (CSI) , 从而可以使用均衡器来消除信道对传输信号的影响。目前已经提出了多种信道估计算法, 主要包括基于发送已知符号 (导频或训练序列) 的信道估计算法和盲估计算法
受到参数化信道估计
2 系统模型
《2.1信道模型》
2.1信道模型
笔者采用宽平稳不相关散射 (WSSUS) 稀疏多径信道模型, 即信道中的多径数d小于相对于信道采样间隔的归一化时延扩展τmax, 并且定义多径信道的稀疏系数为Sparity=d/τmax, 显然当稀疏系数越小, 则信道稀疏性越强。信道冲激响应可表示为

其中hl (t) , τl (t) 分别为在时刻t第l条径的信道复增益系数和多径时延。在时间选择性衰落情况下, hl (t) 随时间呈现较快的变化, 而相对来讲, τl (t) 的变化较慢。
《2.2OFDM系统模型》
2.2OFDM系统模型
设OFDM系统中子载波数为N, 则OFDM系统的调制解调过程表示如下:
信源在时刻n产生的频域数据为an=[an0an1 … an (N-1) ]T, 经过IFFT变换得到相应时域数据bn=IFFTN{an}=[bn0bn1 … bn (N-1) ]T, 添加长度为L的循环前缀形成完整的OFDM符号

其中IN, IN (N-L+1∶N, ∶) 分别表示N阶单位阵及其最后L行组成的矩阵。OFDM符号通过脉冲成形得到的等效基带时域波形为

其中*表示卷积运算, T为有效数据持续时间, Ts为时域采样间隔, Tf=LTs+T为整个OFDM符号持续时间。
将该等效基带信号通过前述信道之后, 接收端使用接收滤波器gR (t) 对信号滤波, 并重新采样、去掉循环前缀、作FFT变换解调后得到离散接收信号yn=[yn0yn1 … yn (N-1) ]T, 其中

假定OFDM子载波都落在发送滤波器和接收滤波器联合频率响应的平坦区, 为不失一般性设该联合响应平坦区的增益为1, 则

信道估计的任务就是根据接收符号yn与发送符号an中的某些已知信息, 得到信道频率响应向量Hn的估计值, 该值将被均衡器用来恢复发送端传输的数据。
3 信道估计与子空间投影
《3.1子空间投影的概念和作用》
3.1子空间投影的概念和作用
给定M维全空间Ξ的一个m (m<M) 维信号子空间Ω=spa{θ1θ2 … θm}, 其中M维向量θi=[θi1θi2 … θiM], i=1, 2, …, m是Ω的一组标准正交基。若发送端产生某向量η∈Ω, 且将该向量发送到接收端, 在传输过程中向量受到了M维零均值加性高斯白噪声n的影响, 从而得到的只是一个有噪声的观察值:r=η+n, 其中加性白噪声n∈Ξ, 但n∉Ω, 且白噪声n每维的方差为σ2, 则接收到的信号与原信号的均方误差为

其中E{·}表示数学期望操作, 而tr (·) 表示求矩阵的迹。可见均方误差ε2与噪声的维数M成正比, 如果能够通过某种操作将噪声限定在维数更小的子空间内, 并且对原始信号不产生影响, 则能够有效减少噪声对原始信号的污染。在子空间理论中, 这种操作可以通过子空间投影来实现。而子空间投影操作的进行依赖于接收方对发送放信号子空间的了解程度, 具体分以下3种情况。
1) 接收方对信号子空间没有任何先验知识。
此时投影矩阵只能设为P1=IM, 经过投影并不会减少噪声空间的维数, 无法实现噪声空间的压缩。
2) 接收方了解某个包含信号子空间Ω的更大子空间Ω′, 即满足Ω⊂Ω⊂Ξ, 且令Ω′=span{q1, q2, …, qK}, m<K<M。
qi (i=1, 2, …, K) 是Ω′的任意一组基。
此时可以构造矩阵Q=[q1, q2, …, qK], 而投影矩阵即为:P2=QQ+, 其中Q+表示Q的Moore-Penrose广义逆。经过投影的接收向量为r′=P2r=QQ+η+QQ+n=η+QQ+n。其中第三个等式是由于η∈Ω⊂Ω′。此时的均方误差为

可见对信号子空间的了解, 可以提高对原始信号判断的准确性。
3) 接收方完全了解原始信号子空间Ω。
设ui (i=1, 2, …, m) 是Ω的任意一组基, 构造矩阵Z=[u1u2 … um], 则投影矩阵为:P3=ZZ+, 同上推导可知投影后均方误差为
![]()
可见, 噪声得到了最大程度上的压缩。
在OFDM信道估计问题中, LS估计值实质上可看作信道响应的一个有噪声观察值
《3.2OFDM信道估计中的子空间投影》
3.2OFDM信道估计中的子空间投影
假设系统使用梳状导频, 即在每个OFDM符号中相同导频位置插入导频符号, 且导频符号采用文献
令导频间隔相对于子载波间隔的归一化值为Df, 导频符号所处的位置集合为Υ= {p (0) , p (1) , …, p (M-1) }, 其中p (i) =iDf, i=0, 1, …, M-1, 且有M=[N/Df]。显然当Df=1时, 即为使用训练序列时的情形。
得到导频处的信道频率响应值后通过插值, 即可获得所有子载波处的信道频率响应值。这里集中讨论导频处的信道响应估计问题, 不考虑插值算法的选择问题。
在插入导频符号时, 在导频点处OFDM系统的输入输出关系可由式 (1) 改写为
![]()
其中上标 (p) 表明相应各项取对应于导频处的值。
首先讨论最基本的LS信道估计器, 该估计器依据如下准则得到:

其中的噪声分量均值为零, 协方差矩阵为Rn=E{N (p) nN (p) Hn}=σ
值得注意, 在OFDM系统中, 导频处系统的信道响应H

其中ωN=e-j2π/N, τn, l=τl (nTf) , hn, l=hl (nTf) , τn=[τn0τn1 … τnτ (d-1) ]T。显然![]() , 而
, 而![]() 即为导频信号子空间, 可见信号子空间由τn完全决定。另外把Df=1, 即使用训练序列时的W (p) N (τn) 记为WN (τn) 。
即为导频信号子空间, 可见信号子空间由τn完全决定。另外把Df=1, 即使用训练序列时的W (p) N (τn) 记为WN (τn) 。
在讨论一般情况下的子空间投影时, 需要知道信号所在空间的一组基。在OFDM信道估计中, 如果充分利用上述的物理结构, 则可以将所需要的投影条件下降到只需了解信号子空间的维数 (而不是信号子空间的一组基) 。
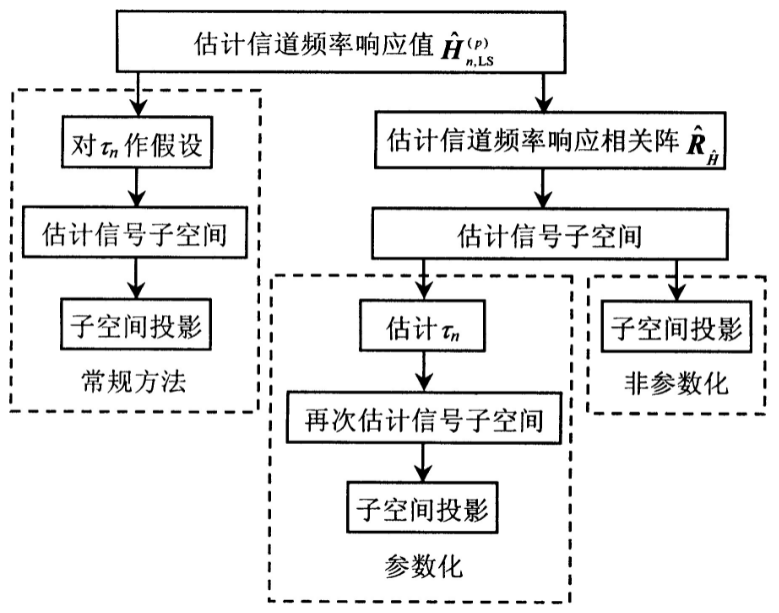
根据对信道多径数目d的了解程度不同, 对τn作不同假设, 产生了不同的估计方法:
1)![]() (完全不了解d) , 对应于基本LS估计
(完全不了解d) , 对应于基本LS估计![]() , 与前述一般情况下的子空间投影相同, 这时无法从子空间投影角度对
, 与前述一般情况下的子空间投影相同, 这时无法从子空间投影角度对![]() 进行改进, 因此导频处估计均方误差为
进行改进, 因此导频处估计均方误差为![]() 。
。
2)![]() (知道d的上界L) , 对应于改进的LS估计
(知道d的上界L) , 对应于改进的LS估计![]() 。在整数时延信道下, 由于
。在整数时延信道下, 由于![]() 是
是![]() 的某d列组成的矩阵, 所以S⊂
的某d列组成的矩阵, 所以S⊂![]()
![]() 。与一般投影讨论中的情况2对应, 可知此时信道估计的均方误差减小为
。与一般投影讨论中的情况2对应, 可知此时信道估计的均方误差减小为![]()
3) τn长度d已知或通过某种方法估计得到, 对应于非参数化信道估计 (延迟子空间信道估计
由于仅仅知道信道多径数d, 而不知道各径具体位置, 从而无法得到τn的估计, 也就不能直接利用![]() 估计信号子空间。非参数化方法在估计出信号子空间的一组基之后立即将
估计信号子空间。非参数化方法在估计出信号子空间的一组基之后立即将![]()
![]()

《图1 子空间投影与信道估计》
图1 子空间投影与信道估计
Fig.1 Subspace projecting and channel estimation
在无线通信环境中, 多径时延τn, l随时间的变化速度相对多径信道系数hn, l的变化非常缓慢, 两者之间常相差2~3个量级[11]。因此在某段观察时间内可以近似地将τn, l看作常数, 并省略其时间下标n, 将等式 (3) 改写为![]() , 则
, 则![]()
![]() , 其中
, 其中![]() , 而
, 而![]() 是多径时延功率谱。设R
是多径时延功率谱。设R

其中Us是相应于最大d个特征根的特征向量组成的矩阵, 则有
![]()
故span{Us}也是原信号子空间。因此只要得到了R

计算获得, 而d的估计可采用直接ED分解、MDL准则
此处可以得到, 在信道多径数目已知时, 通过子空间投影方法能够达到的最小均方误差为ε2=dσ
4 信道估计与子空间跟踪
在实际应用中, 无线信道的多径时延总是在缓慢变化的。为了保持子空间投影的准确性, 必须对信号子空间进行跟踪。
对于非参数化的信道估计和投影, 文献
笔者将子空间跟踪算法也推广到参数化的信道估计和投影。首先利用子空间跟踪算法估计出信号子空间;其次利用估计出的信号子空间使用ESPRIT方法
《4.1子空间跟踪算法》
4.1子空间跟踪算法
基于快速序列正交迭代的子空间跟踪算法首先是在自适应低秩滤波器 (low-rank adaptive filters) 的应用背景下提出。自适应低秩滤波器需将信号投影到显著信号子空间 (dominant signal space) 中, 而不是像RLS自适应滤波器一样将信号投影到全数据子空间 (complete data subspace) , 因此在每个时刻都需要得到当前显著信号子空间的信息。利用序列正交迭代可构造Shur伪逆来近似低秩滤波器推导中所需的Moore-Penrose伪逆, 从而可推导出高效的自适应低秩滤波器。
令Φn是时刻n待进行ED的样本自相关矩阵, Qn是时刻n的正交迭代矩阵, 则基本序列正交迭代的过程如下:
1) 计算An=ΦnQn-1;
2) 对An作QR分解An=QnRn。
每个时刻n重复上述过程即可得到信号子空间估计为![]() 。
。
实际应用中, 样本自相关阵Φn一般使用秩1修正的方式得到, 即Φn=κΦn-1+znzHn, 其中1<κ≤1是一给定常数, zn是时刻n的样本列向量。
为加快序列正交迭代跟踪速率, 一个基本思想就是把正交迭代矩阵Qn向前一时刻的span {Qn-1}上投影, 可将Qn作正交分解Qn=PQn-1Qn+Δn, 其中PQn-1是span {Qn-1}上的正投影阵, Δn是Qn中与span {Qn-1}正交的分量。令Γn=QHn-1Qn, 则可推出
其中Φn-1Δn-1计算量最大, 但对迭代影响可忽略, 因此将该项舍弃, 得到快速正交迭代算法如下
1) 计算An=κAn-1Γn-1 +znzHnQn-1;
2) 对An作QR分解An=QnRn。
3) 计算Γn=QHn-1Qn;
在每个时刻n重复上述过程得到信号子空间估计![]() 。
。
该算法的特点是迭代过程中不需要明确计算样值相关矩阵Φn, 只要给定初始值Q0, Γ0和A0, 每次输入当前样本列向量![]() , 通过上述迭代即可得到导频信号子空间估计。利用QR分解得到的矩阵Rn也可以进一步在算法中引入自适应阶数估计, 从而在每个时刻n都可以更新信道多径数目d的估计值。
, 通过上述迭代即可得到导频信号子空间估计。利用QR分解得到的矩阵Rn也可以进一步在算法中引入自适应阶数估计, 从而在每个时刻n都可以更新信道多径数目d的估计值。
4.2多径时延τn的估计
设J0=[IM-1, 0]和J1=[IM-1, 0]都是 (M-1) ×M的矩阵。令![]() , 易见U0, U1分别是
, 易见U0, U1分别是![]() 前M-1行和后M-1行组成的矩阵。即
前M-1行和后M-1行组成的矩阵。即

设导频间隔为Df, 令

则有U1=φU0。
由等式 (5) 可知, 存在d×d阶可逆矩阵T, 使得Us=W
![]()
其中B=T-1φT, 只需求出矩阵B的特征值, 就能得到对角阵φ的对角线上元素, 从而得到τn。在实际中, 由于导频处频率自相关矩阵可以近似估计出来, 对估计出来的自相关阵作ED分解可得到Us的估计![]()
![]()
上述过程使用的就是ESPRIT方法
4.3第二次导频处信道响应子空间估计与投影
在得到多径时延的估计值
![]()
因此得到投影矩阵为![]()
![]()
虽然所讨论的都是针对LS类信道估计, 但对于非LS类估计, 如鲁棒MMSE信道估计方法 (即将信道多径时延功率谱假定为平坦谱的MMSE算法) , 同样可以利用子空间投影来改进其性能, 这一点可以从下述的仿真结果中明确看出。因此, 所提到的子空间投影与跟踪算法是一种可以广泛应用的普遍方法。
5 仿真结果与讨论
仿真中采用的OFDM系统的子载波数目N=128, 时域采样周期Ts=7.812 5 μs, 有效数据持续时间为T=NTs=1 ms, 循环前缀相对时域采样周期的归一化长度为L=32, 子载波使用QPSK调制, 载波频率fc=2.4 GHz。信道Doppler效应采用Jakes模型构建, 为仿真快衰落信道, Doppler频率设为fmax=80 Hz。多径时延功率谱采用指数衰减型时延功率谱。
仿真中通过投影得到导频处频率响应的估计值后, 使用基于DFT的插值算法得到所有子载波上的信道频率响应, 即整个信道的频率响应依下式计算获得
![]()
可以看出, 使用基于DFT的插值算法同时完成导频处子信道响应的投影和对其他频点信道响应的插值。由此可见, 如果使用基于DFT的插值算法, 非参数化方法实际上也可以看作经过了2次投影, 但由于无法得到具体信道时延, 第二次投影的子空间维数将会很大, 因此非参数化方法的第二次投影 (DFT插值) 效果将不会很明显。仿真中定义归一化信道均方误差为
![]()
其中H是真实信道响应,
《5.1导频信号子空间不变时, 子空间投影对信道估计性能的改进》
5.1导频信号子空间不变时, 子空间投影对信道估计性能的改进
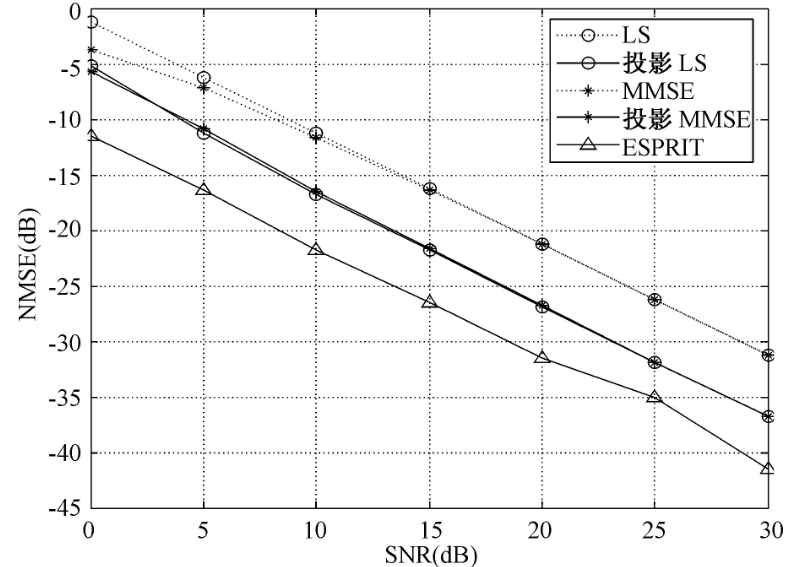
此时假设信道为3径信道, 且归一化多径时延在仿真过程中保持为τn=[0 3 10]T。每时刻n的信号子空间使用直接ED分解得到信号子空间, 此时对基本LS算法、鲁棒MMSE算法、有投影的LS算法、有投影的鲁棒MMSE算法、投影ESPRIT算法进行了仿真, 其结果如图2所示。

《图2 子空间投影对信道估计性能的改进1》
图2 子空间投影对信道估计性能的改进1
Fig.2 Improvement of channel estimation performance when subspace projecting is used (1)
可见使用子空间投影可以有效地提高信道估计精度 (不管是对LS类算法还是MMSE类算法) , 同时, 使用参数化的子空间投影 (ESPRIT) 可以得到比非参数化的子空间投影更好性能。这是由于利用子空间投影压缩信道估计的噪声, 提高了估计性能。
5.2导频信号子空间不变时, 使用子空间跟踪与投影技术对信道估计性能的改变
仿真中使用与5.1节中仿真相同信道设置, 但此时的信号子空间是利用子空间跟踪技术得到, 仿真结果如图3所示。

《图3 子空间投影对信道估计性能的改进2 》
Fig.3 Improvement of channel estimation performance when subspace projecting is used (2)
从图3可以看出, 使用子空间跟踪算法与子空间投影算法相结合同样能提高信道估计性能, 但计算量比5.1节中的算法大大下降。
《5.3导频子空间发生变化时, 非参数化[11]和参数化子空间跟踪与投影方法性能比较》
5.3导频子空间发生变化时, 非参数化
[11] 和参数化子空间跟踪与投影方法性能比较
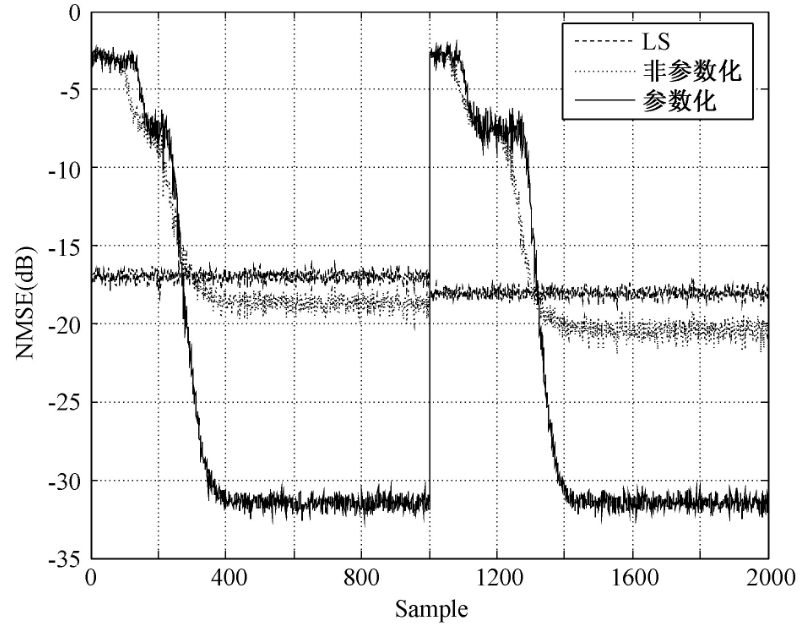
对多径信道的每次实现仿真了2 000个OFDM符号, 在前1 000个OFDM符号期间, 信道多径时延τn=[0 3 10]T, 而在后1 000个OFDM符号期间, 信道多径时延变为τn=[0 8 11]T。另外还仿真了非整数时延信道下相应的性能比较, 其中前1 000个OFDM符号期间多径时延为τn=[0 3.4 10.5]T, 后1 000个OFDM符号期间多径时延为τn=[0 8.4 11.5]T。在SNR=20 dB时仿真结果分别如图4、图5所示。为方便比较, 仿真中还列举了使用LS估计时的信道归一化均方误差。

《图4 整数时延信道下子空间跟踪性能比较》
图4 整数时延信道下子空间跟踪性能比较
Fig.4 Comparison of subspace tracking performance under sample-spaced multipath delay

《图5 非整数时延信道下子空间跟踪性能比较》
图5 非整数时延信道下子空间跟踪性能比较
Fig.5 Comparison of subspace tracking performance under non-sample-spaced multipath delay
从仿真结果可以看出, 在整数时延信道下, 所提出的算法与文献
6 结论
子空间投影技术是一种压缩参数估计误差、提高估计性能的有效手段。在OFDM环境下, 利用子空间投影方法改进信道估计性能的实质, 是充分利用已知或通过估计得到的信道阶数信息来减小信道估计空间的维数, 从而减小估计误差。由于子空间投影方法并不局限于某些特定环境, 因此可以将子空间投影推广到非LS信道估计方法。当信号子空间随时间变化时, 需要采用子空间跟踪技术保持对信号子空间的良好估计。笔者提出的基于子空间跟踪的参数化信道估计方法在性能上优于非参数化时的相应方法, 并能在信道多径时延发生变化时保持稳定性能。











 京公网安备 11010502051620号
京公网安备 11010502051620号




