
《1 引言》
1 引言
利用固体或液体摆的特性检测加速度和倾斜角, 这是大家熟悉的惯性技术
《2 密闭腔中自然对流气体的摆现象》
2 密闭腔中自然对流气体的摆现象
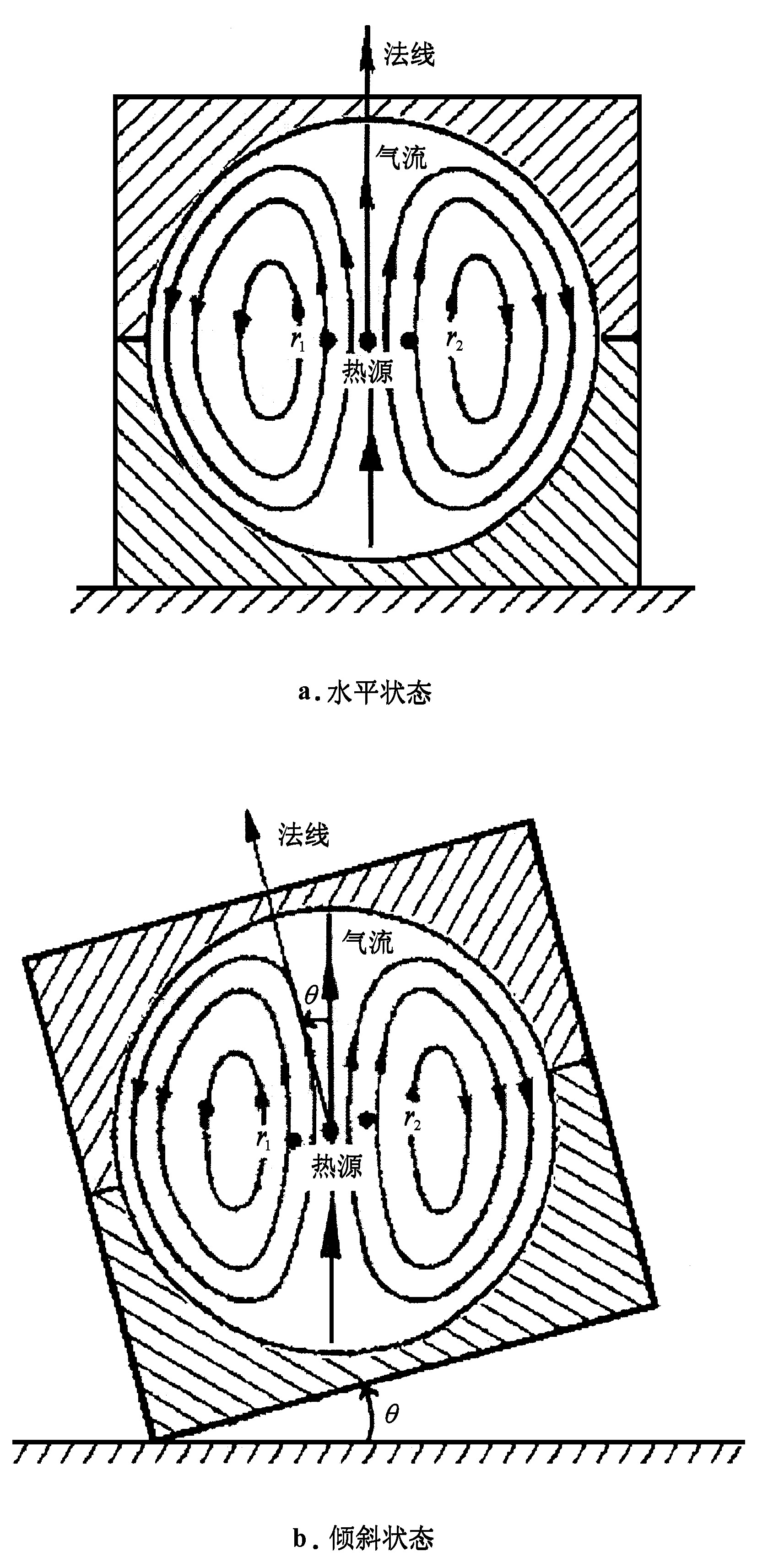
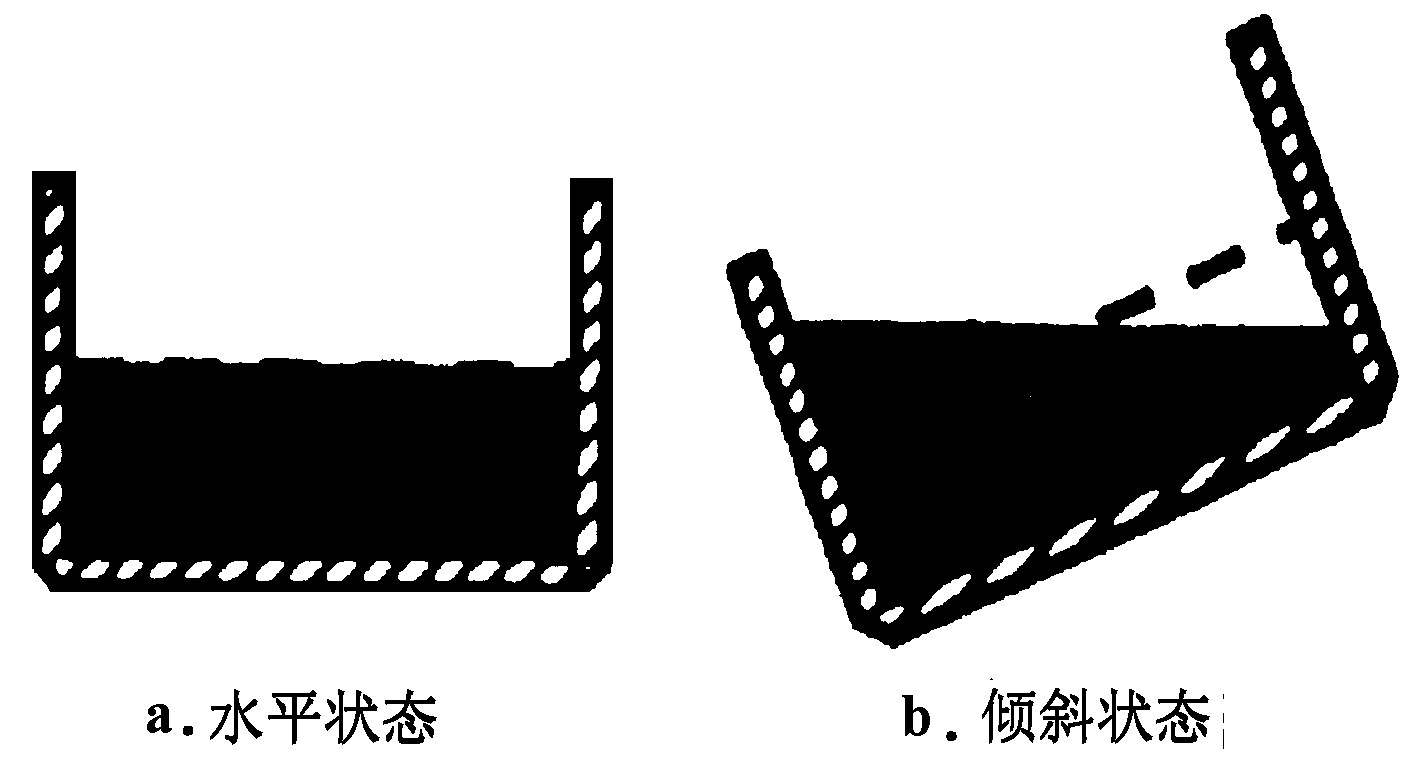
在图1a的密闭腔中设置一热源, 密闭腔中接近热源的气体由于温度高、密度ρ小而形成向上流动的气流。远离热源的气体由于温度低、密度ρ∞大, 形成向下流动的气流。这样, 在密闭腔中形成垂直向上的自然对流气体。笔者发现, 密闭腔倾斜一个角度θ时, 自然对流气体仍保持在原来垂直向上的方向, 如图1b所示。图1所示密闭腔中自然对流气体的这种现象, 与图2、图3所示的固体摆和液体摆的特性类似。由图1、图2和图3的类比说明, 自然对流气体有摆的特性。
《3 密闭腔中自然对流气体的浮升力》
3 密闭腔中自然对流气体的浮升力
《3.1 在地球表面附近的浮升力》
3.1 在地球表面附近的浮升力
根据热传递理论
式中ρ是热源加热的气体密度, ρ∞ 是周围未加热气体的密度, g是重力加速度。Fbuolift是自然对流气体的驱动力, 因为加热气体的密度小于未加热气体的密度, 故浮升力的方向是重力的反方向。由于浮升力的驱动, 被加热的气体垂直向上流动。
《3.2 绝对坐标系中的浮升力》
3.2 绝对坐标系中的浮升力
式 (1) 是相对坐标系中Fbuolift 的表达式, 它忽略了引力加速度的作用。在绝对坐标系中, 考虑密闭腔的引力加速度时, 重力彻体力ρg和气体静压力梯度产生的力-ρ∞g分别由-ρ (a-G) 和ρ∞ (a-G) 代替。浮升力可表示为
式中a是腔体的绝对加速度, G是引力加速度。因为非引力加速度 (比力) f =a-G, 故
由式 (3) 可知, 浮升力的方向就是比力f的方向, 量值和f成比例。
《3.3 浮升力与温度变化的关系》
3.3 浮升力与温度变化的关系
自然对流气体中, 流体的密度差由温度差引起, 因此浮升力是温度差的函数。流体压力一定时, 单位温度升高或降低引起的体积变化率称为体积膨胀系数β。令j为流体比容 (j = 1/ρ) , 则β的表达式为
式中, 下标p表示压力恒定。对于气体, 由j=1/ρ可得
所以, 气体的热膨胀系数
当温度变化不大时, 气体的密度差可近似表示为
所以, 单位体积上的浮升力为
《4 气体摆式加速度计和倾角传感器》
4 气体摆式加速度计和倾角传感器
固体摆式和液体摆式加速度计和倾角传感器是分别利用固体和液体在重力作用下的摆特性, 通过电容式、电阻式等敏感元件检测加速度和倾角, 这是较成熟的技术
《图4》
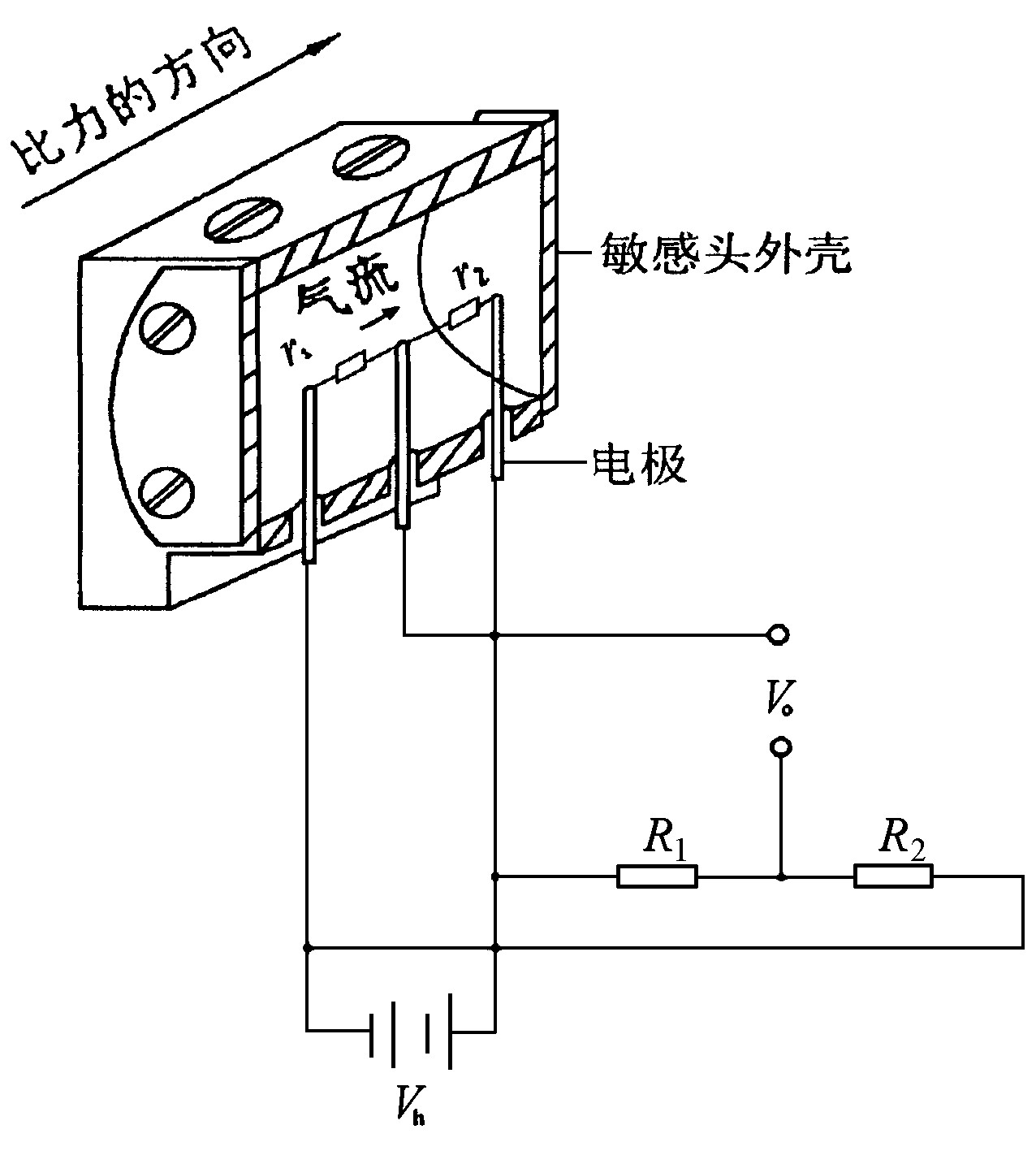
图4 气体摆式加速度传感器的敏感元件示意图 Fig.4 Sense component sketch map of gas pendulum accelerometer
《图5》
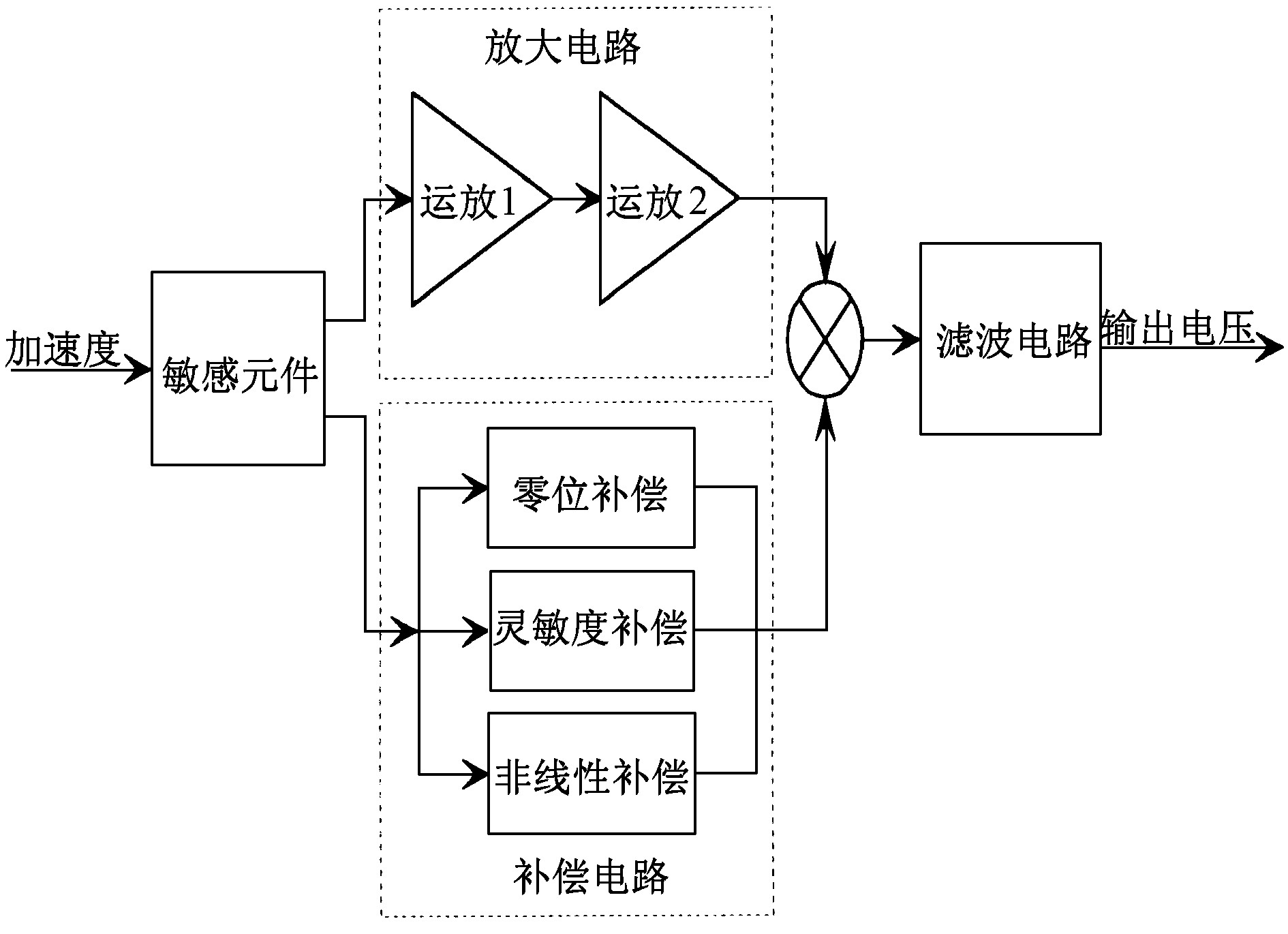
图5 气体摆式加速度传感器的信号处理电路框图 Fig.5 Block diagram of gas pendulum accelerometer signal processing circuit
《图6》
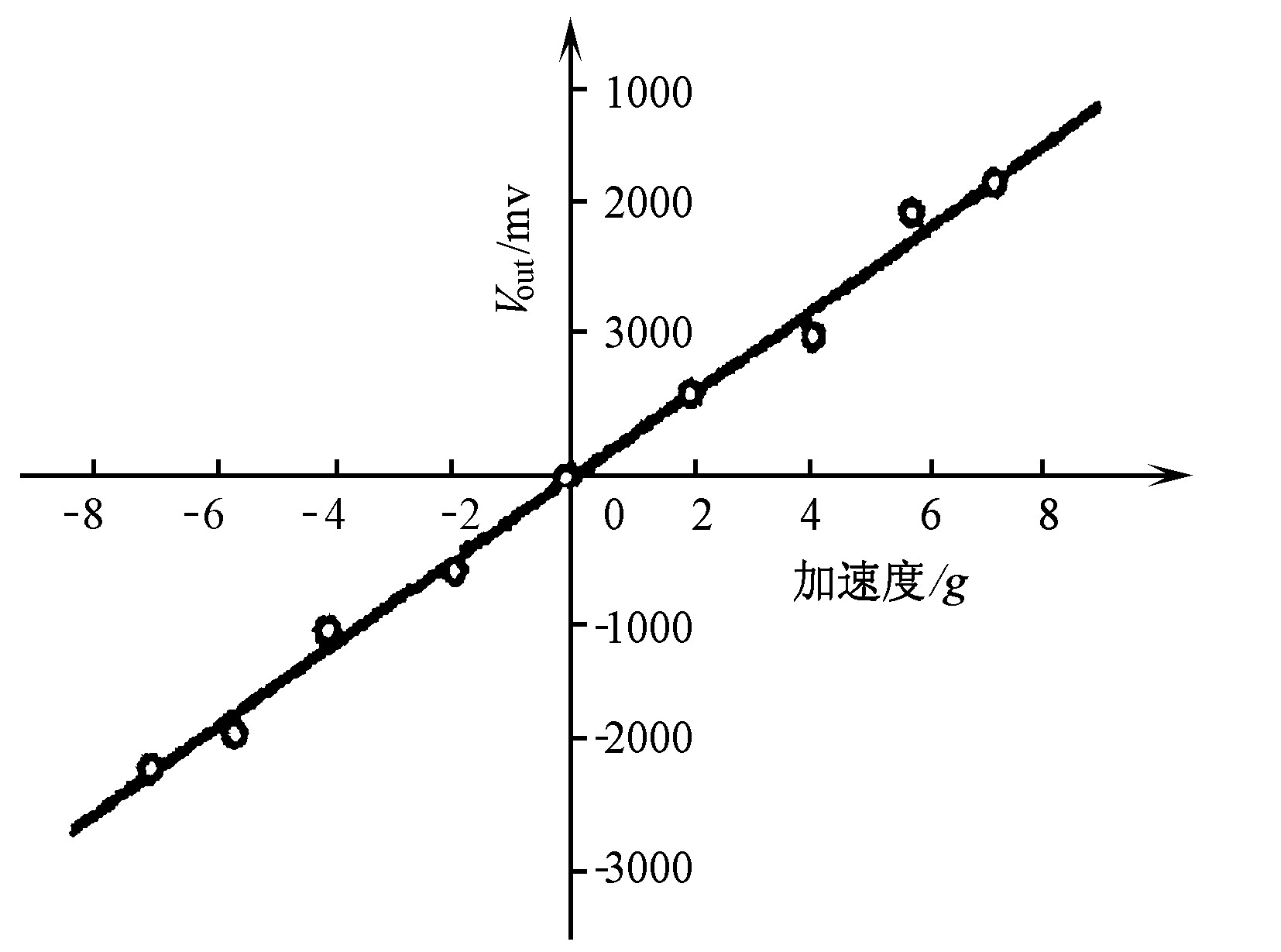
图6 气体摆式加速度计的输出电压 Fig.6 The output voltage of the gas pendulum accelerometer
重力场中使用如图7所示的结构进行试验。两热电阻丝平行于腔体的轴放置, 它们既作加热源, 又作敏感元件。这种结构的自然对流腔体可用于检测倾斜角, 试验表明, 测量范围为±45°, 非线性度<1%FS, 分辩率<0.01°。图8示出了气体摆式倾角传感器的输出电压与输入倾角的关系。
《图7》
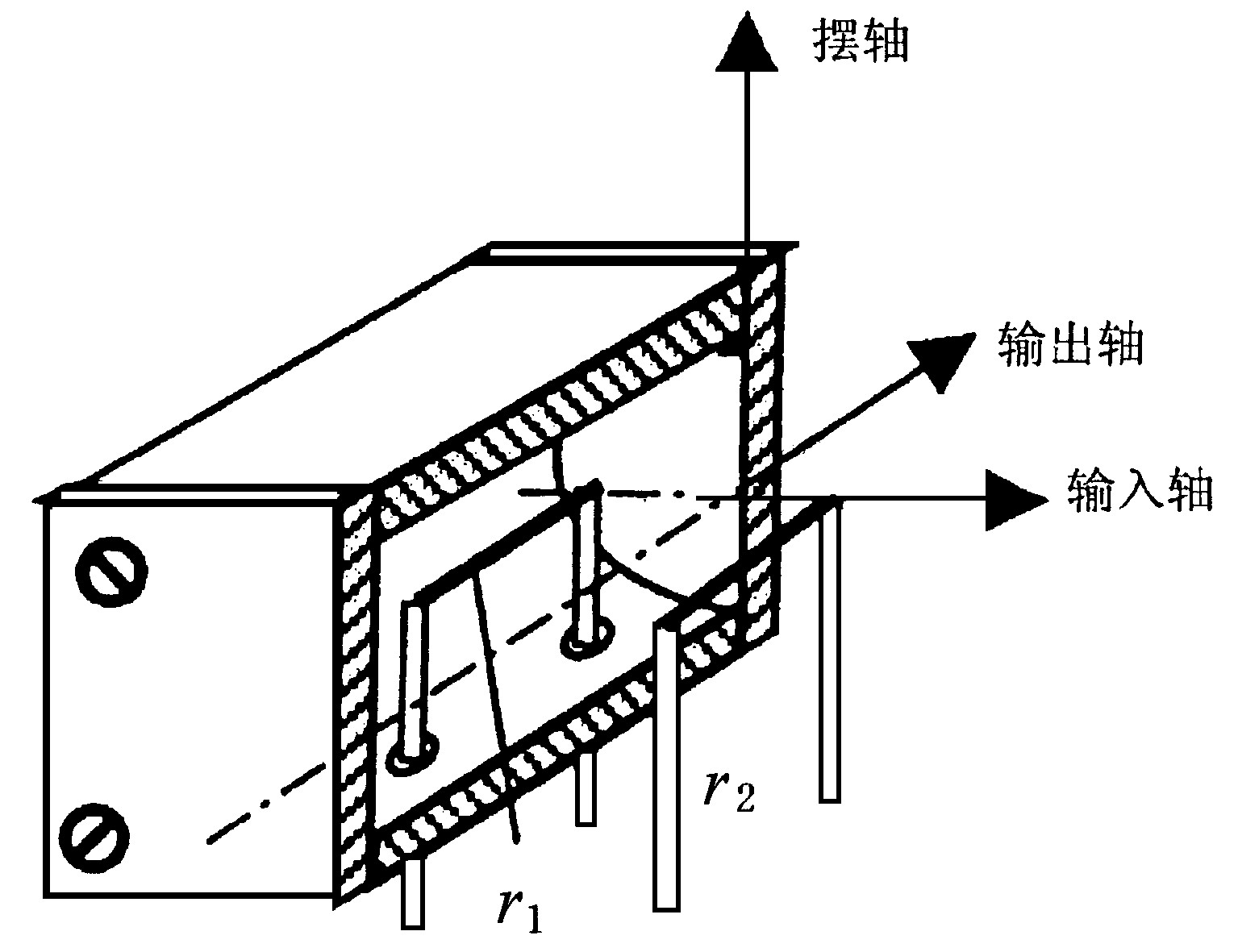
图7 气体摆式倾角传感器的敏感元件结构 Fig.7 The structure of the gas pendulum tilt sensing element
《图8》
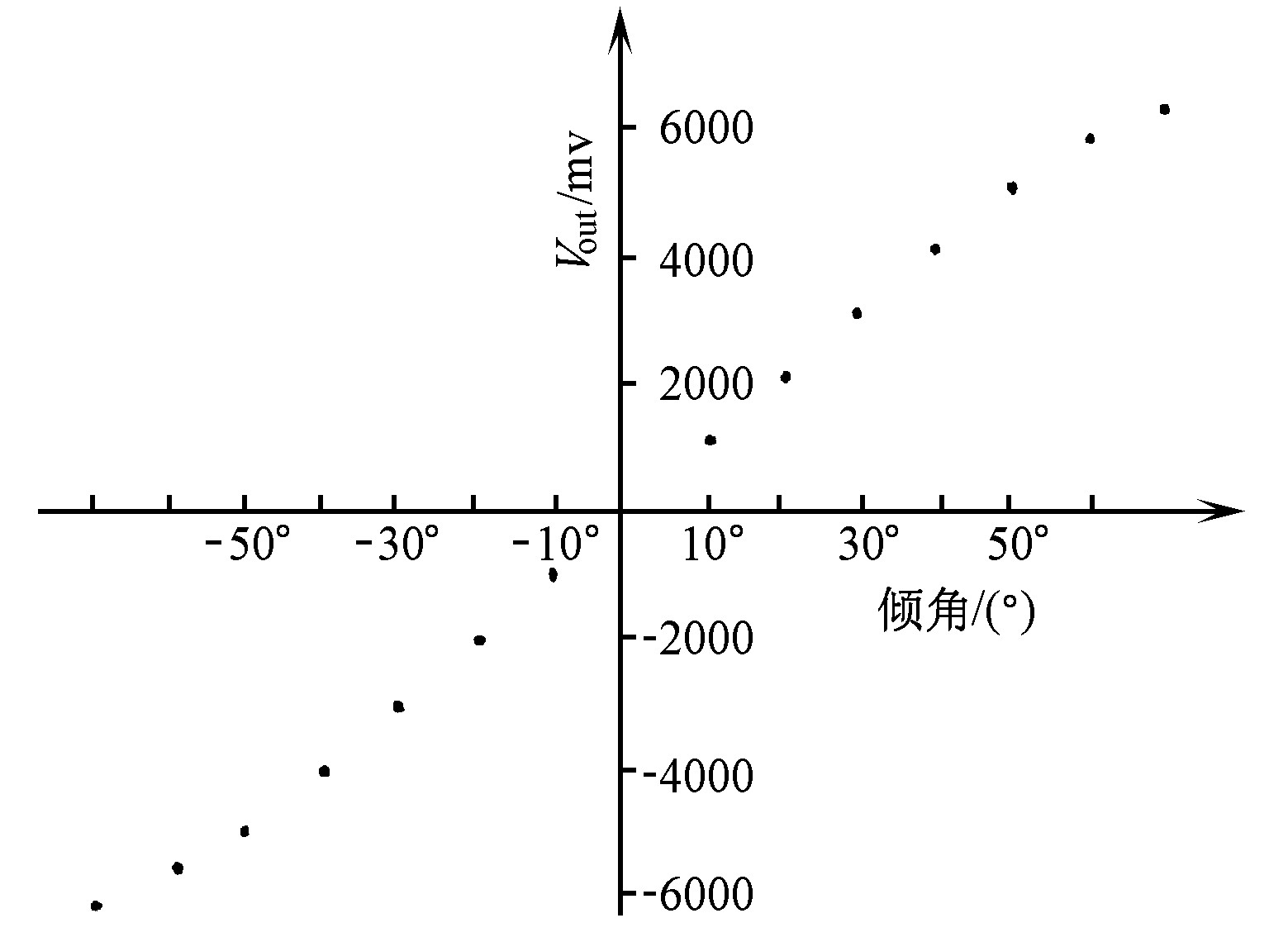
图8 气体摆式倾角传感器的输出电压 Fig.8 The output voltage of the gas pendulum tilt sensor
《5 结论》
5 结论
通过理论分析、结构设计和实验, 可以得出以下结论:
1) 浮升力是自然对流气体的驱动力;
2) 在浮升力的作用下, 自然对流气体有摆的特性;
3) 利用自然对流气体的摆特性能构成气体摆式加速度计和倾角传感器。











 京公网安备 11010502051620号
京公网安备 11010502051620号




