

《1 前言》
1 前言
与常规战斗机不同,垂直/短距起降战斗机不仅具有常规的气动升力面和控制面,而且采用大角度推力矢量加上各种形式的辅助升力装置(如升力风扇、升力喷管、引射器等)来提供垂直或短距起降时的直接升力,同时在悬停和低速飞行时,必须依靠反作用力系统(reaction control system, RCS)控制飞机姿态。如何准确地分析低速情况下、受喷射气流诱导作用和地面效应影响的非线性气动力,并在此基础上建立较为精确的动力学模型,通过气动舵面、发动机推力矢量、升力风扇和 RCS 等多个执行机构的综合协调实现稳定、 优越的控制性能, 是实现 V / STOL 飞机飞行控制的关键[1,2]。
本文针对系统动力学建模、协调综合飞行控制等关键问题,研究无尾布局 V / STOL 平台总体方案、气动布局特性分析、飞行器动力学及协调综合飞行控制律设计等机理和关键技术:介绍了原理验证机的总体配置,在此基础上建立面向控制的数学模型;通过智能自适应方法进行异构多操纵面协调综合飞行控制,控制量通过控制分配合理的协调各操纵面,最后在 MATLAB7.0 / Simulink 环境下通过仿真进行了验证。
《2 平台动力学特性与建模》
2 平台动力学特性与建模
《2.1 平台控制系统配置》
2.1 平台控制系统配置
飞机气动布局采用无尾鸭翼式布局,气动舵面包括升降副翼和分裂式阻力方向舵,如图 1 所示,在机翼内侧安装升降副翼,在机翼外侧安装阻力方向舵。 升降副翼偏转范围是 -30 °~ 45 °,分裂式方向舵上下偏转行程均为 0 °~ 60 °。
《图1》

图1 无尾布局垂直起降飞行平台布局图
Fig.1 Layout of tailless V / STOL
如图 2 所示,动力装置包括飞机后部靠近重心位置的涡喷发动机和安装在飞机前端的升力风扇。涡喷发动机本身可向下偏转 90 °,为飞机提供升力和巡航推力。另外在两侧机翼接近翼端处各安装一个小型电动涵道风扇,为飞机提供滚转控制力矩。
《图2》

图2 无尾垂直起降飞机动力装置布局
Fig.2 Engine layout of V/STOL aircraft prototype
在常规飞行阶段,飞机的控制力来自于气动舵面,其中升降副翼提供俯仰控制力矩,而阻力方向舵提供滚转和偏航控制力矩。在悬停阶段,飞机控制力来自于推进系统,由升力风扇升力、涡喷发动机推力和涡喷发动机推力偏转角提供俯仰控制力矩,由两侧电涵道风扇提供滚转控制力矩。在过渡飞行阶段,由气动舵面和推进系统混合提供控制力,这也是垂直/短距起降飞机控制系统设计最为复杂的飞行阶段[3~5]。
《2.2 六自由度动力学模型》
2.2 六自由度动力学模型
飞机飞行状态千变万化,尤其在做机动飞行任务时,整个系统为一个时变的、非线性、强耦合系统。飞机运动可用六自由度非线性刚体动力学描述,在机体坐标系中可以表示成以下 12 个状态方程(采用国际标准坐标轴系)。

式( 1 )中,
( u,v,w ) 是三轴线速度(飞机速度在机体坐标系中的三轴分量); ( p,q,r ) 是三轴角速度; ( ) 是姿态角; ( xN,yE,hD ) 是惯性系(地面坐标系)中的飞机位置; (uE ,vE ,wE ) 是飞机速度在惯性系(地面坐标系)中的三轴分量; (
) 是姿态角; ( xN,yE,hD ) 是惯性系(地面坐标系)中的飞机位置; (uE ,vE ,wE ) 是飞机速度在惯性系(地面坐标系)中的三轴分量; (  ) 是飞机除重力外所受的合力(包括气动力和发动机推力、风扇升力等)产生的加速度; (Fx ,Fy ,Fz ) 是飞机除重力外所受的合力(包括气动力和发动机推力、风扇升力等);( L,M,N ) 是飞机所受的合力矩;( Ix ,Iy ,Iz ,Ixz ) 是飞机的转动惯量。
) 是飞机除重力外所受的合力(包括气动力和发动机推力、风扇升力等)产生的加速度; (Fx ,Fy ,Fz ) 是飞机除重力外所受的合力(包括气动力和发动机推力、风扇升力等);( L,M,N ) 是飞机所受的合力矩;( Ix ,Iy ,Iz ,Ixz ) 是飞机的转动惯量。
设在机体轴中发动机、升力风扇及涵道风扇提供的升推力为[ Tx , Ty , Tz ] T,气动力为[ Ax , Ay , Az ]T,则 [ Fx , Fy , Fz ]T 的计算公式为:

设在机体轴中发动机、升力风扇及涵道风扇产生的力矩为[[LT , MT , NT ]T, 气动 力矩为[ LA , MA , NA ]T,则飞机所受合力矩[ L , M , N ]T 计算公式为:
《3 平台飞行控制设计》
3 平台飞行控制设计
《3.1 概述》
3.1 概述
无尾垂直起降飞行平台在不同的飞行阶段,飞行参数变化巨大,飞行特性也有着极大不同。 例如,在常规飞行阶段飞机的速度与普通歼击机相同,而在悬停阶段飞机的速度则接近于零;在过渡飞行阶段飞机的控制来源是包括气动舵面和推进系统的混合控制[6~8]。在不同的飞行阶段控制特性极为不同,不能使用单一的控制策略,因而需要针对各飞行阶段设计不同的控制策略,针对不同的控制目标进行控制(见表 1)。
《表1》
表1 飞行控制模式
Table1 Flight control mode
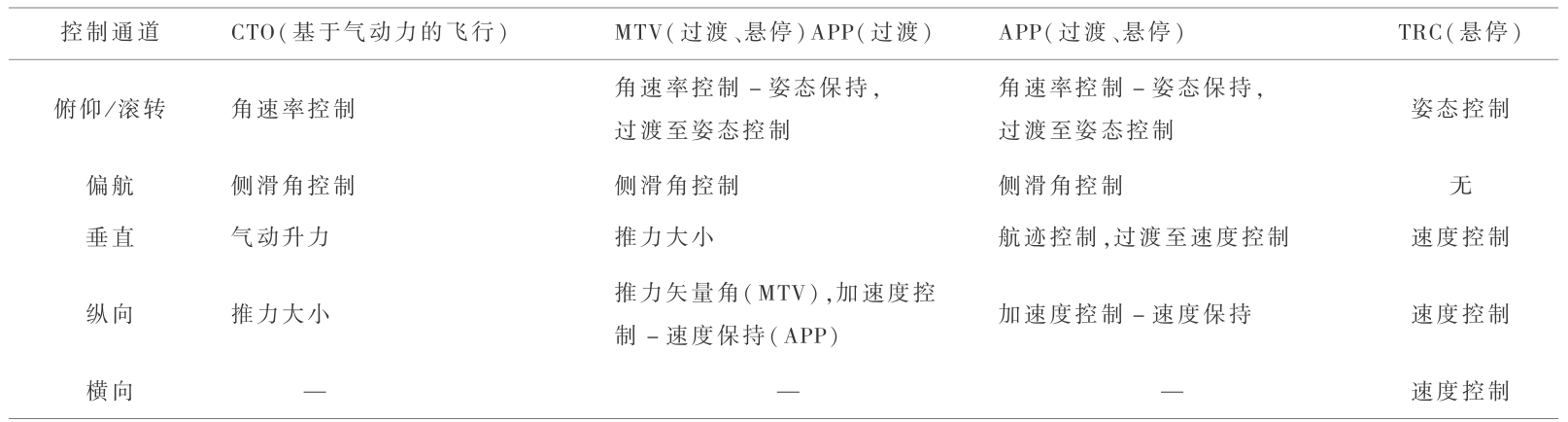
对应无尾垂直起降飞行平台各个差异极大的飞行阶段,相应地也需要设计不同的控制模式,而在不同控制模式下控制律也有所差异,需要针对不同控制模式设计控制律,然后将其综合为一个总控制律,并实现不同控制模式间的平滑过渡。
各个控制模式的控制律虽然有所差异,但其基本结构是相同的,如图 3 所示。图 3 中,线性控制器模块的输出即为期望闭环动态特性 v,飞机和发动机模型模块的输出为非线性输出动态 b ( x ),控制分配和限制模块代表控制分配矩阵 A ( x ),但在实际的应用中控制分配并不是简单的线性矩阵相乘,而是包含非线性函数映射的关系。
《图3》

图3 非线性动态逆控制结构
Fig.3 Nonlinear dynamic inverse controller
《3.2 综合飞行/推进控制分配算法研究》
3.2 综合飞行/推进控制分配算法研究
V/STOL 飞机必须融合多种控制手段,在研究先进综合飞行控制系统时应综合考虑各种先进的气动力控制手段和新型的控制面,如推力矢量、反作用力控制( RCS )、复合舵面等。 因此,飞行过程就存在多加力装置的输入配合和协调控制问题[9,10]。 飞机主要通过飞行状态的变化影响推进子系统的工作,如马赫数 Ma 、高度 H 、迎角 α 、侧滑角 β 等均对进气道的进气流量有直接影响,进而影响推进系统产生的推力;推进子系统对飞机的耦合作用主要是通过推力变化引起作用在飞机上的力和力矩不平衡,从而使飞机姿态发生变化。 综合飞行/推进系统的结构如图 4 所示。
《图4 》
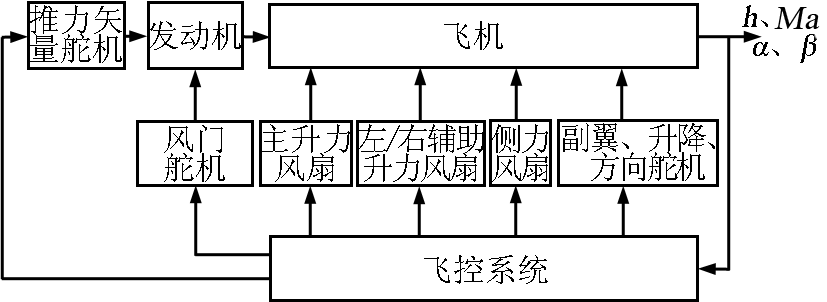
图4 综合飞行/推进系统结构
Fig.4 Flight/propulsion controller
无尾垂直起降飞行平台最为复杂的控制阶段是过渡阶段,此时控制机构方面存在气动舵面控制力和推进系统控制的冗余。过渡阶段的控制分配问题,通过利用各控制机构的控制效率来解决,在滚转、俯仰和偏航通道控制律产生的力矩指令,根据各控制机构所能产生的最大控制力按比例进行分配,这一控制分配算法可以表示为

式( 4 )中,下标 i 表示单个控制机构。
对悬停阶段飞行控制进行了仿真验证,各通道的响应如图 5 、图 6 所示。
《图5》

图5 悬停段俯仰姿态指令响应
Fig.5 Pitch commander response of hover phase
注:1 kgf = 9.8 N(常态)
《图6 》
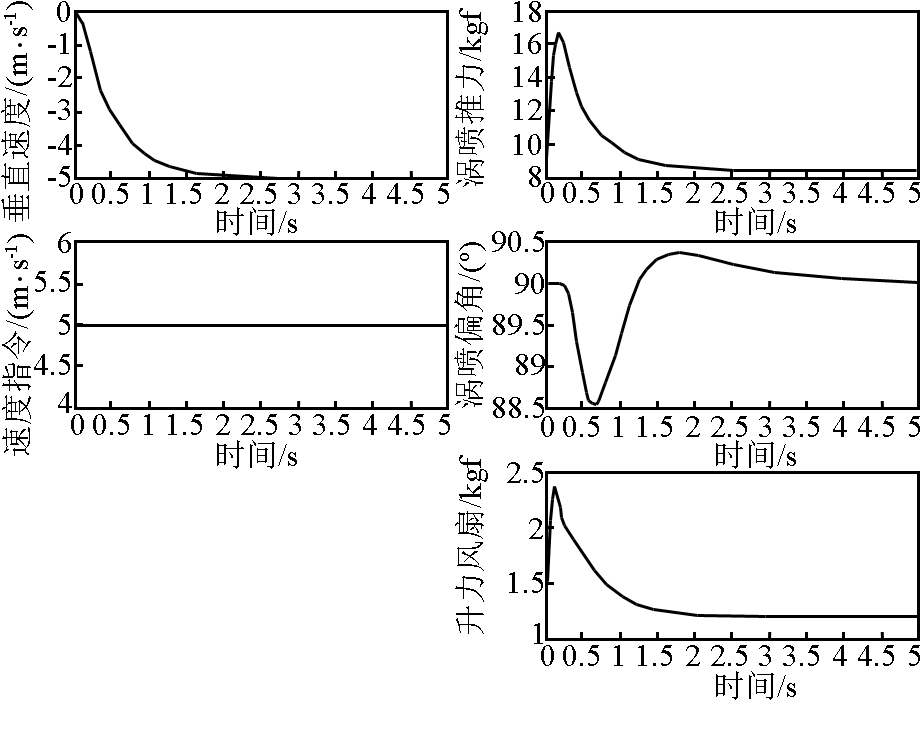
图6 悬停段垂直速度指令响应
Fig.6 Vertical velocity commander response of hover phase
《3.3 神经网络自适应输出反馈飞行控制》
3.3 神经网络自适应输出反馈飞行控制
3.3.1 指令滤波器和线性控制器
指令滤波器具有如下形式:

式( 5 )中, ωn 是滤波器的自然频率;  是阻尼比。定义跟踪误差向量如下
是阻尼比。定义跟踪误差向量如下

线性控制器 vdc 具有如下形式:

式( 7 )中,  至少是 ri -1 维的。定义误差向量
至少是 ri -1 维的。定义误差向量

则有误差动态
定义新的误差向量 以及误差动态
以及误差动态

完整的误差动态为

设计线性控制器 vdc 使得 是 Hurwitz 矩阵,则对于正定矩阵 Q,如下 Lyapunov 方程存在唯一正定对称解
是 Hurwitz 矩阵,则对于正定矩阵 Q,如下 Lyapunov 方程存在唯一正定对称解

3.3.2 线性观测器
假设控制信号的自适应单元能够补偿建模误差,则建立如下线性观测器

其中设计增益矩阵 K 使得  渐进稳定,一般使得观测器动态比误差动态速度快 5 倍。使得
渐进稳定,一般使得观测器动态比误差动态速度快 5 倍。使得

则观测误差动态为

3.3.3 数值仿真结果
图 7 对 V / STOL 飞机的过渡飞行过程进行控制仿真。在这一过程中,飞机由悬停状态逐步加速到 60 m/ s,同时俯仰姿态也进行相应的调整。在过渡过程中,V / STOL 飞机保持误差在 2 m 范围内的平直飞状态。当过渡飞行过程结束,过渡到普通巡航飞行状态时,飞机的升力风扇的推力减小到 0,推力矢量方向从 90 ° 逐步减小到 0 ° 。而在这一过渡过程中,在开始时,由于速度较小。姿态控制主要通过推力矢量和升力风扇等实现,当速度逐步加大时,气动舵面的控制作用逐步增加,并最终过渡到姿态主要由气动舵面控制。
《图7》

图7 过渡飞行过程控制响应曲线
Fig.7 Simulation results of the transition flight stage
注:1 rad =1 r· min-1
《4 结语》
4 结语
为了跟踪 21 世纪国际航空高新技术的发展,推进我国航空技术的持续发展,进行 V / STOL 综合飞行/推力矢量控制技术的应用基础研究十分必要。通过机理分析和 CFD 计算对原理验证机的动力学和数学模型进行了研究,建立了平台的非线性六自由度全量运动方程。讨论了非常规无尾气动布局下多气动面冗余配置及与推力矢量协同作用控制飞机轨迹和姿态的空气动力学特性及它们的数值计算模型。并通过智能自适应方法对其进行控制,控制量通过控制分配合理的协调各操纵面,最后在 MAT- LAB7.0 / Simulink 环境下通过数字仿真进行了验证。仿真结果表明通过所设计的智能自适应控制方案和控制分配方法,对该模型机的控制效果良好。
致谢
该文章得到了国家高科技计划 863 -809 专家组的指导和支持(2008AAJ114,2008AAJ201),在研究过程中,还得到了“清华大学 -沈阳飞机设计研究所联合研究中心”和“智能系统与技术国家重点实验室”的大力帮助,在此表示衷心的感谢。











 京公网安备 11010502051620号
京公网安备 11010502051620号




