

《1 前言》
1 前言
全球大气温度和湿度的垂直分布对全球气象与气候有着直接的影响。每年热带风暴、台风、暴雨等灾害性天气给全球各国带来巨大的生命财产损失,因此大气温度和湿度探测在天气预报、全球气候变化研究中的作用越来越重要,美国、欧洲太空局(欧空局)、俄罗斯等国家和机构的极轨气象卫星都搭载了微波大气温度和湿度探测仪。美国的 NOAA 系列极轨气象卫星的先进微波湿度探测单元(AMSU-B),频率为89 GHz(垂直极化)、150 GHz (垂直极化)和 183.31 GHz(水平极化,三通道);从 2005年5月发射的NOAA-18开始,AMSU-B 被微波湿度探测仪(MHS)代替,仍然包括5个探测通道,但150 GHz通道频率改为157 GHz ,183.31±7 GHz 通道频率改为190.31 GHz[1,2] 。;欧洲空间局的Metop 系列气象卫星的MHS,频率设置与AMSU-B相同;俄罗斯发射的气象卫星,其微波辐射计频率覆盖范围为 6.6~183.31 GHz,其中用于大气湿度垂直探测的探测频率亦与AMSU-B相同。上述微波大气探测仪,在军事气象保障、天气预报、强对流监测和洪涝灾害监测等方面发挥了很大的作用。
我国的风云三号(FY-3)卫星是我国新一代极轨气象卫星,有效载荷包括光学、红外、微波遥感器以及空间环境监测器等,旨在实现全球全天候、多光谱、三维定量探测以及云和降水参数的探测,监视大范围的自然灾害和生态环境变化。FY-3A 卫星于2008年5月 27 日发射,我国第一颗搭载微波大气湿度探测仪的卫星,微波湿度计(MWHS)探测频率为 150 GHz 和 183.31 GHz,其中 150 GHz 为双极化(水平极化和垂直极化)设计;183.31 GHz包括三个通道,频率分别为 183.31±1 GHz、183.31± 3 GHz 和 183.31±7 GHz。微波湿度计在 2008 年成功监测到“凤凰”、“海鸥”、“森拉克”等台风和热带气旋的生成、发展与消失的过程[3] ,为提高天气预报准确度提供技术帮助。FY-3B 卫星于 2010 年 11 月 11 日发射,A 星与 B 星联合运行,在时间上提高了观测效率,更有利于对短时灾害性天气现象的监测与预报。
《2 微波辐射计探测大气温度和湿度的基本原理》
2 微波辐射计探测大气温度和湿度的基本原理
星载微波辐射计在对地观测时,穿透地球大气测量来自地球的特定频率的微波辐射。由于大气中的湿气(冰、云、雨、雪等)对来自地球表面的微波辐射具有衰减作用,因此作为探测大气温度和湿度的微波辐射计,不同通道的观测数据包含了地球大气层不同高度的温度和湿度信息,从其亮度温度中不仅可以反演得到大气温度和湿度的垂直分布,也可以得到地球表面的温度信息。
大气微波辐射传输的不透明度谱如图1所示[4] ,图 1 中显示了氧和水汽的大气不透明度。在 0~ 280 GHz频率范围内,分别有两条氧气吸收线和两条水汽吸收线,氧气吸收线可用于大气温度阔线测量,而水汽吸收线可用于大气湿度阔线测量。其中第一条氧气吸收线频率为50~60 GHz,第二条吸收线中心频率位于118.75 GHz;而第一条水汽吸收线中心位于22.235 GHz,第二条位于183.31 GHz。通常利用 50~60 GHz 和 118.75 GHz 探测大气温度廓线,利用 183.31 GHz 探测大气湿度廓线,因为第一条水汽吸收线对于进行阔线测量而言衰减太低,而且其部分透明性被用于获取水汽总量;而且通常设置89 GHz 和150 GHz两个窗区通道,探测地球表面和较低大气的信息,用以辅助测量大气温湿度廓线,并用于测量卷云、强降雨等。
《图1》

图1 大气的不透明度谱
Fig.1 The atmospheric optical spectrum
《3 先进微波大气探测仪设计与研制》
3 先进微波大气探测仪设计与研制
《3.1 系统设计》
3.1 系统设计
先进微波大气探测仪是一套基于超外差接收机的全功率型微波辐射计,温度廓线是通过测量位于118.75 GHz氧气吸收线的8个通道的亮度温度所获得的;水汽廓线是通过测量位于183.31 GHz水汽吸收线的5个不同通道的亮度温度所获得的。系统由天线与接收机单元、数据处理单元和电源单元组成,系统框图如图2所示。
《图2》

图2 先进微波大气探测仪系统框图
Fig.2 The schematic of advanced microwave atmospheric sounder system
先进微波大气探测仪接收到的信号来自于地球大气层的自由空间辐射,通过一个垂直于卫星飞行轨迹进行扫描的天线反射面所获取。在轨工作采取实时定标模式,每个扫描周期进行一次高、低温两点定标。高温源为湿度计内部的吸收体,低温源为宇宙冷空间背景的微波辐射。接收到的信号聚焦于馈源,然后通过多通道接收机下完成变频,放大、滤波、检波和积分处理。数据处理单元进行数据采集与量化处理,并通过1553B总线与卫星进行通信。
《3.2 系统研制》
3.2 系统研制
3.2.1 天线与扫描驱动机构
天线与扫描驱动机构集成为一体,扫描是通过旋转反射面实现的,反射面与轴成45º角,由一个电机带动两个天线反射面进行扫描。卫星高度、地面顺轨方向速度、空间分辨率(足印尺寸)以及积分时间等要素决定了扫描周期为 2.667 s。为提高对地观测时间,采用变速扫描方式,其中对地观测入射角范围相对于天底点为±53.35º,用时1.71 s,冷空间定标角度距天地点为73º,用时0.1 s;热源定标角度位于天顶点,0.1 s;剩余时间用于快速空运转。天线与扫描驱动机构如图3所示。
《图3》
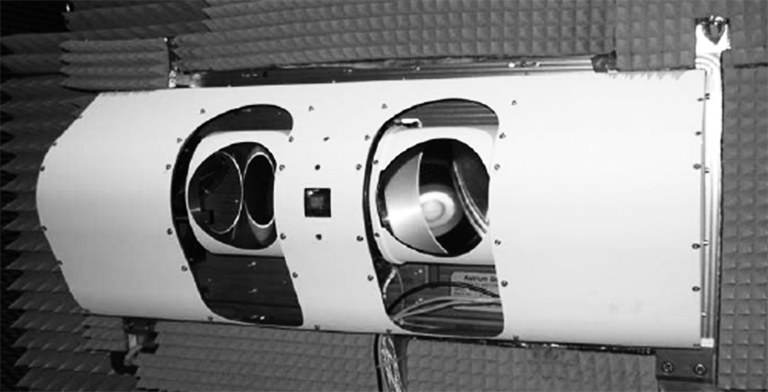
图3 天线与扫描驱动机构
Fig.3 The antenna and scanning driving mechanism
3.2.2 接收机
接收机由高频前端、中低频接收机组成。其中,高频前端包括馈源、混频器、本振和宽带低噪声放大器;中低频接收机包括中频放大、检波和积分电路组成。89/118.75 GHz 前端和 150/183.31 GHz 前端如图4所示,高频前端是辐射计接收机的重要组成部分,其性能决定了辐射计整机的系统性能。
《图4》
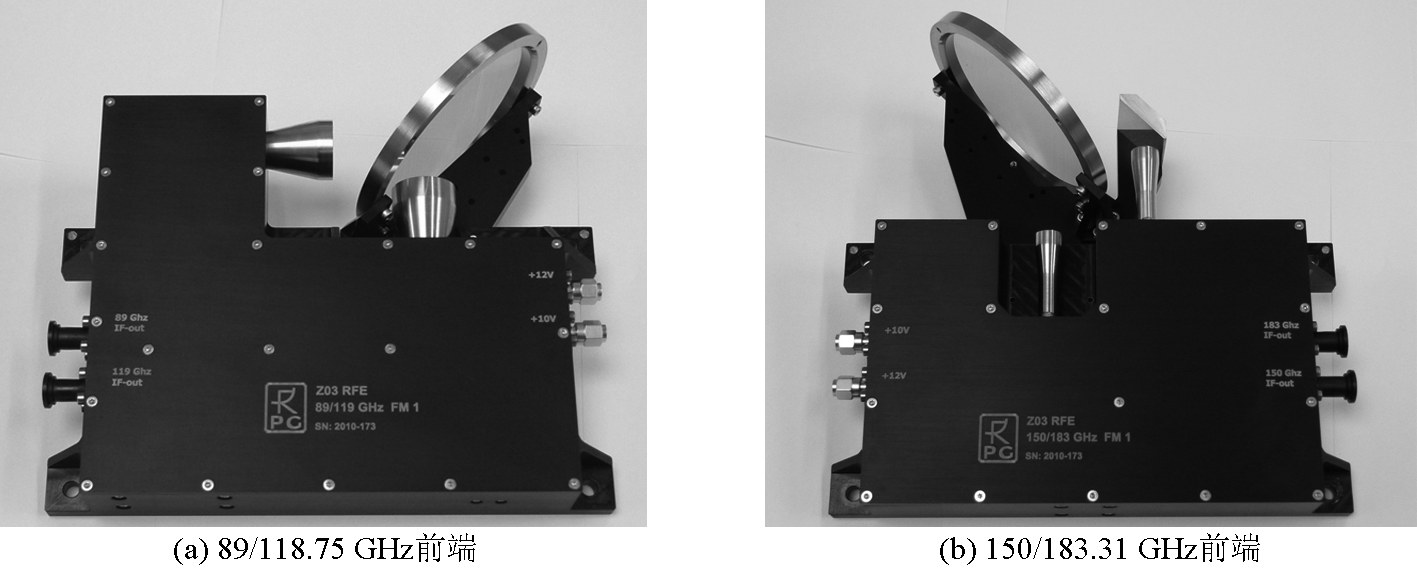
图4 接收机前端
Fig.4 Front-end of receiver
89/118.75 GHz 接收机框图如图 5a 所示,150/ 183.31 GHz接收机框图如图5b所示。其中频率分离采用极化栅网实现,频率分离后馈入各自接收机与本振进行混频下变频处理及前置放大,中低频接收机完成信号进行放大、滤波,经过检波及积分处理后,输出至数据处理单元。其中,118.75 GHz 和 183.31 GHz接收机,经前端完成下变频后通过中频功分器分成多个探测通道,而89 GHz和150 GHz为单通道设计。
《图5》
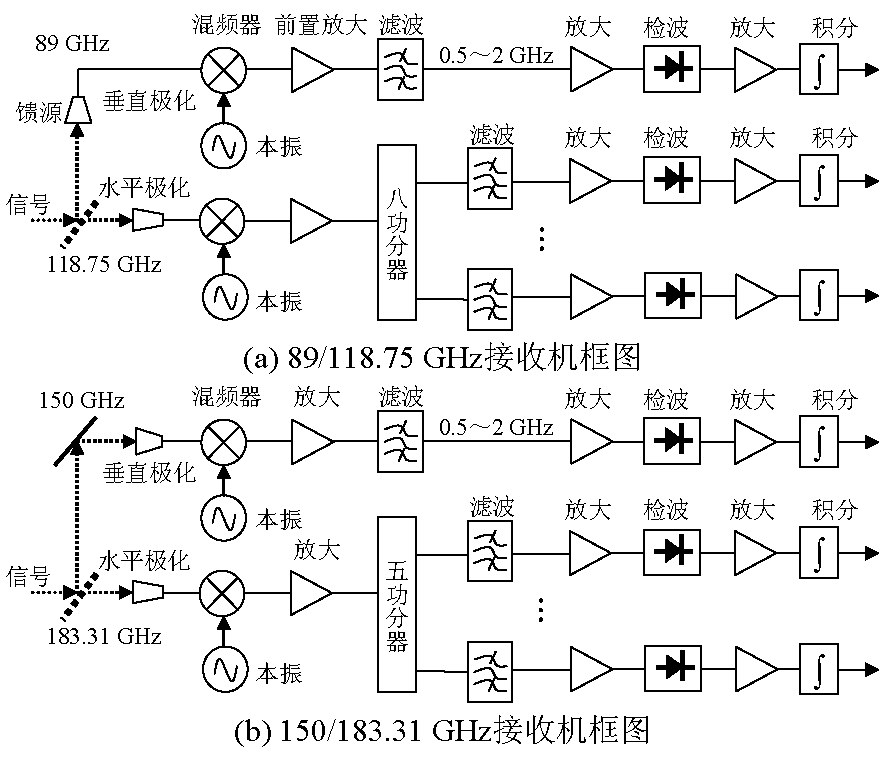
图5 接收机框图
Fig.5 The schematic diagram of receiver
3.2.3 定标源
微波湿度计采用在轨实时周期定标,低温源为宇宙冷空间的背景辐射,而高温源为仪器内部的定标体,高低温定标源与目标微波辐射信号经过相同光学路径进入接收机,具有较高的定标精度。
热定标源由三部分构成,即微波定标体、测温电路和屏蔽罩,天线每旋转一周,定标一次。吸收体由高发射率的单晶硅尖劈阵组成,其面积分布覆盖天线投影口径,黑体外有圆筒状屏蔽罩,消除来自周围环境的杂散辐射,屏蔽罩采用复合材料内壁金属化以减轻重量。
定标体采用被动温控方式,温度测量采用铂电阻作温度传感器。铂电阻分别分布在黑体的中心、边缘等不同位置,根据测温点的实际测量值以及吸收材料的温度梯度分布,加权计算得到黑体的物理温度。热定标源如图6所示。
《图6》

图6 热定标源
Fig.6 High temperature calibration reference
3.2.4 电源单元和数据处理单元
电源单元由二次电源变换器(DC/DC 变换)和电源分配器两部分组成,为提高可靠性,采取主/备份冗余设计,其主要功能将卫星母线电压转换为系统所需要的直流电压品种;数据处理单元由天线驱动接口、系统测控模块和总线通信模块组成,通过系统软件控制天线扫描模式、接收机工作状态,完成数据采集、执行遥控指令及遥测数据管理;通过 1553B总线与卫星进行通信,接收卫星发出的遥控指令以及卫星姿态、时间码等辅助信息,将科学数据与辅助数据打包下传。
在物理结构上,先进微波探测仪由三个独立的单元组成,电源单元和数据处理单元如图7所示,天线与接收机单元如图8所示,三个单元之间通过电缆网连接起来。
《图7》

图7 电源单元和数据处理单元
Fig.7 The power supply and data processing unit
《图8》

图8 天线与接收机单元
Fig.8 The antenna and receiver unit
《4 系统工作模式》
4 系统工作模式
先进微波探测仪扫描模式分为变速扫描、匀速扫描和定点观测三种工作模式。匀速扫描模式周期为 2.667 s,与变速扫描周期相同;定点观测模式可以根据需要固定任意角度进行观测;扫描模式的选择及切换通过地面数据注入遥控指令完成。
变速扫描模式为默认的对地观测工作模式。微波湿度计采用机械扫描,结合卫星运动(顺轨方向)和天线窄波束的交轨方向扫描。为增加对地观测时间,电机带动天线进行 360º的连续变速圆周扫描,扫描周期为 2.667 s,对地观测扫描张角为 ±53.35(º 以天底点为中心)。高温定标源位于天顶点位置,冷空定标角度287°(距离天底点73°),扫描过程如图9所示。
《图9》

图9 扫描模式示意图
Fig.9 The schematic diagram of scanning mode
为保证足够小的辐射测量灵敏度,必须尽可能增加对地观测时间。因此在对地观测期间降低电机速度进行匀速扫描,对地观测时间为1.71 s,此值是根据卫星地面速度、天底点像元尺寸以及两条连续的扫描线之间天底点像元相邻而不重叠的要求计算出来的。
变速扫描模式扫描周期时间分配:
1)对地观测:±53.35º,用时1.71 s,匀速扫描。
2)对地观测终止至热源定标起始角:53.35º~ 178º,用时0.357 s,加速/减速。
3)热源定标:180±2º,用时0.1 s,匀速扫描。
4)热源定标终止至冷空定标起始角:182º~285º,用时0.3 s,加速/减速。
5)冷空定标:287±2º,用时0.1 s,匀速扫描。
6)冷空定标终止至对地观测起始角:289º~ 306.65º,用时0.1 s,加速/减速。
风云三号卫星轨道高度 836 km,卫星地速约 7.5 km/s,扫描角度范围(相对于天底点)为±53.35º, 150/183.31 GHz 天线 3 dB波束 宽度 为 1.0º ,89/ 118.31 GHz天线3 dB波束宽度为2.0º。根据以上参数,先进微波探测仪扫描刈幅宽度为2 645 km;每条扫描线有98个像元,每个像元驻留时间17.4 ms;刈幅间隔:20 km;天底点像元为圆形,150/183.31 GHz直径16 km,89/118.31 GHz直径32 km;随着入射角增大,地面像元逐渐变化为椭圆形,而且尺寸变大。
《5 系统性能测试》
5 系统性能测试
先进微波大气探测仪最重要的指标是亮温灵敏度。亮温灵敏度 DT(辐射分辨率),又称“噪声等效亮温差NEDT”,被定义为微波辐射计接收机能够检测到的最小天线温度的变化,用下面的公式表示:

式(1)中,B 为检波前带宽,τ 为积分时间,G 为检波前增益,ΔG/G 表示一个扫描周期内两点定标之间的增益稳定度,Tsys 为天线温度TA 与接收机等效温度 Trec之和。X 表示量化处理过程的噪声贡献。对于实时两点定标的辐射计系统,增益波动的影响基本消除。
系统测试按照微波湿度计正常在轨运行模式进行,在一个扫描周期内分别对高温参考源、低温参考源和目标进行观测及数据采集和记录。其中,微波湿度计内部的吸收体作为高温参考源,位于天顶点位置;液氮制冷的吸收体作为低温参考源,置于在轨运行时的冷空定标方向;目标源为实验室环境状态下的吸收体,置于天底点观测方向。参考源和目标源的发射率已知,物理温度在吸收体的多个不同位置经过精密测量,因此其亮度温度可以准确计算出来。
微波辐射计的噪声功率/电压转换采用平方律检波方式,因此被观测的目标亮度温度与输出电压之间为线性关系,即  ,其中
,其中  和 b 为常数。假定 TH 和 TL 分别为高温参考源和低温参考源的亮度温度,而 VH 和 VL 为对应输出,目标源对应输出为 V0 ,那么根据高低温参考源确定的线性关系可以推导出目标源的亮度温度 T0 :
和 b 为常数。假定 TH 和 TL 分别为高温参考源和低温参考源的亮度温度,而 VH 和 VL 为对应输出,目标源对应输出为 V0 ,那么根据高低温参考源确定的线性关系可以推导出目标源的亮度温度 T0 :

对一定时间内的目标源的测量数据进行统计,其平均值为亮度温度的测量值,与亮度温度计算值的差即为测量的准确度,测试结果表明,测量准确度小于1.4 K;其方差统计值为 σ ,那么灵敏度为

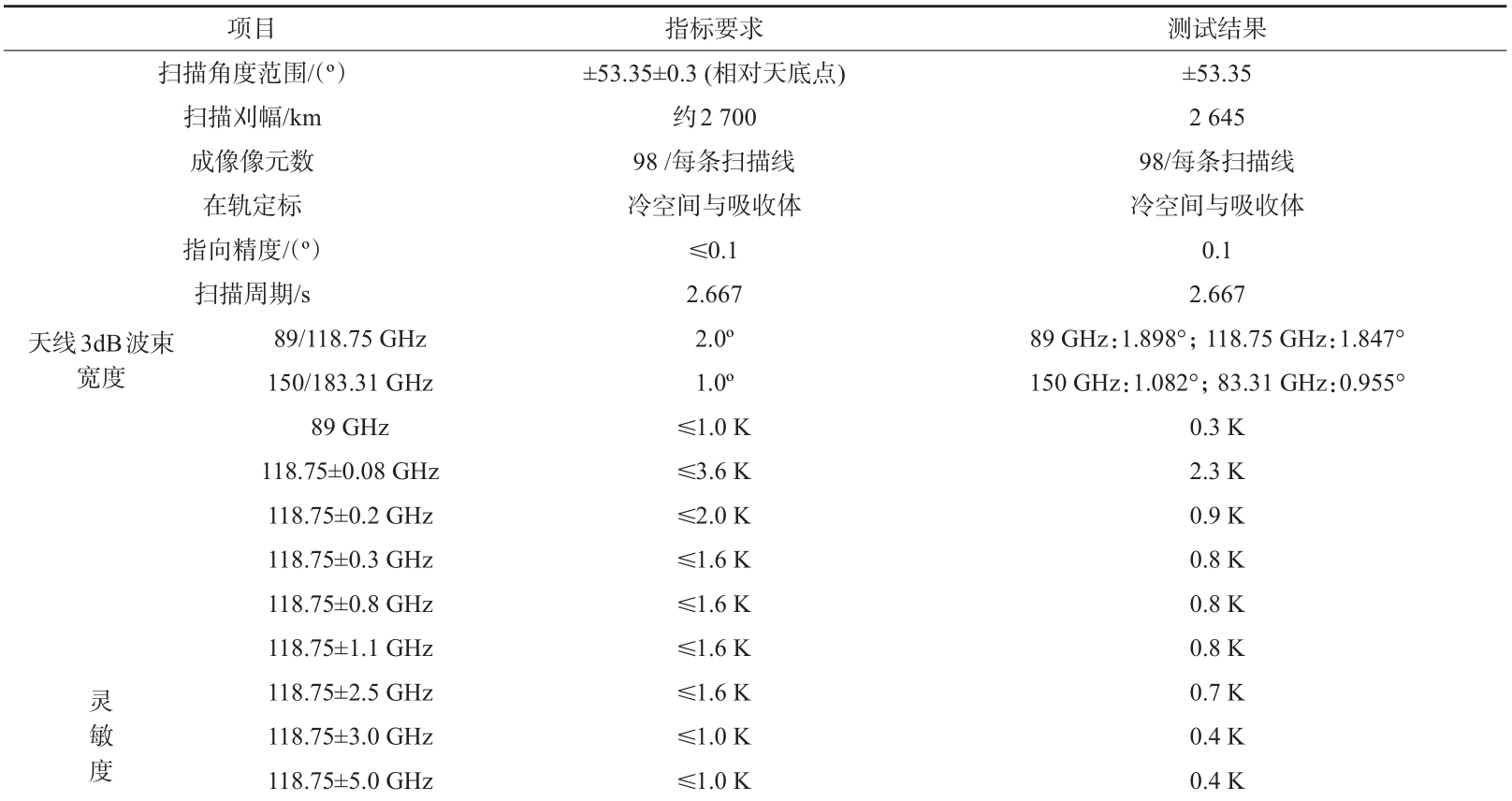
先进微波探测仪主要性能指标要求与测试结果的对比见表1。可以看出,主要性能指标满足设计要求。
《表1》
表1 主要性能指标要求与测试结果对比
Table 1 The comparison of the performance between requirements and test results

《6 结语》
6 结语
毫米波辐射计在大气探测中具有重要作用。 FY-3卫星先进微波大气探测仪可以全天时、全天候地观测大气温度和湿度的垂直分布(水汽廓线)、水汽含量和降雨量等空间气象资料,为数值天气预报、气候变化研究和环境监测提供重要参数,目的是提高中长期数值天气预报,以及天气预报的准确性。地面测试结果表明,主要性能指标满足设计要求。FY-3先进微波大气探测仪的研制将为我国空间大气温度和湿度探测技术的研究与发展奠定技术基础。











 京公网安备 11010502051620号
京公网安备 11010502051620号




