

《1 前言》
1 前言
主动式微波散射计是向海面发射微波频段能量的雷达系统,它通过雷达接收回波信号的强弱并通过不同角度的回波信号反演出10 m高度海面风速和风向[1] 。随着星载散射计发射计划的增多以及在科研和业务化应用的发展,学者们普遍认为准确获取雷达回波强度信息(定义为归一化雷达后向散射系数)是决定海面风场反演质量的关键[2] 。微波散射计数据预处理过程主要包括从散射计发射和接收单元获取地面观测单元的雷达后向散射系数,并对观测面元的中心进行几何定位,获得其地理坐标的过程。准确获取观测面元的雷达后向散射系数及其地理坐标是包括风场反演在内的各种应用的基础。
我国自主研发的海洋二号(HY-2A)卫星已于 2010年8月成功发射,在HY-2A之前,由于无法获得星载微波散射计原始数据,国内学者研究领域主要集中在散射计海面风场反演算法的研究上[3~7] ,在仪器硬件的设计研究和数据产品的应用研究之间存在一定的脱节。HY-2A卫星的成功发射为全面掌握主动式微波散射计预处理技术,并不断改进和提高反演风场精度提供了一个良好的机会。
本文以近年来在微波散射计预处理和风场反演方面的工作为基础[8] ,充分利用HY-2A海洋卫星有效载荷微波散射计的前端数据,开展雷达后向散射系数的地理定位算法研究,探讨提高后向散射系数精度的方法,最终为提高海面风场的反演精度和定位精度打下基础。
《2 HY-2A卫星微波散射计技术特点》
2 HY-2A卫星微波散射计技术特点
《2.1 微波散射计观测几何》
2.1 微波散射计观测几何
HY-2A微波散射计采用双点笔形波束体制[9] 。天线采用抛物反射面天线,产生两个点波束,其中内波束水平极化,外波束垂直极化。通过360°旋转实现对同一分辨单元4次不同方位角测量,微波散射计观测示意图见图1。
《图1》
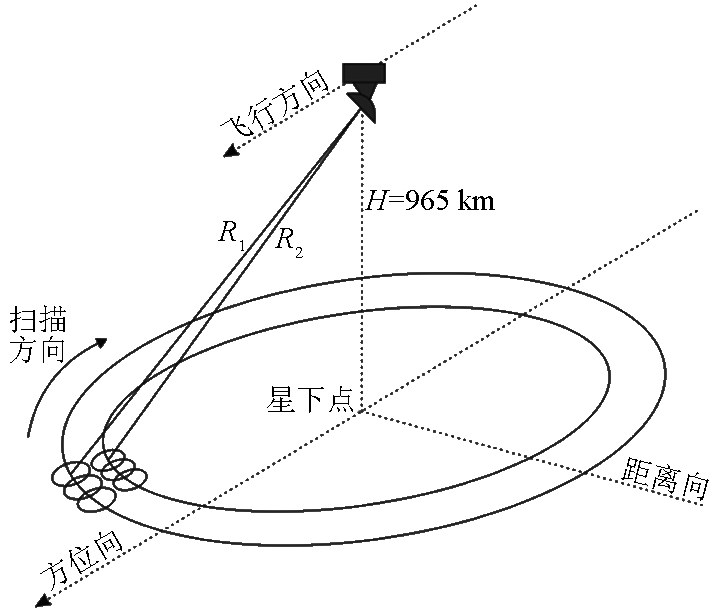
图1 HY-2A卫星微波散射计观测示意图
Fig.1 Schematic diagram of the HY-2A scatterometer observation
天线波束围绕中心轴 360°扫描,扫描速度为 95°/s(低转速),或105°/s(高转速)。天线波束足迹扫描方向为逆时针。天线视角:内波束为34.8°;外波束为40.7°。
《2.2 HY-2A微波散射计工作特点》
2.2 HY-2A微波散射计工作特点
1)工作模式。设计有3种工作模式,分别为测量模式、测试模式、外定标模式。测量模式包括海面观测、内定标和噪声测量3种不同工作阶段,这3个工作阶段按照事先设计好的时序工作。测试模式包括连续定标子模式和单次采集(天线高速转、低速转都可以)子模式。外定标模式除接收机增益固定外,其他特性和正常测量模式一致。
2)收发时序。HY-2A 微波散射计采用脉冲雷达体制;设计有内外两个波束,两波束交替工作;设计有两种转速,低转速和高转速,两种转速下海面观测点数不同。设计发射脉冲时宽为1.5 ms,脉冲重复频率(PRF)为181 Hz,回波采集时间长度兼顾卫星高度和姿态的正常变化范围。
《2.3 HY-2A微波散射计的性能技术指标》
2.3 HY-2A微波散射计的性能技术指标
HY-2A微波散射计由探测头部、系统控制器、伺服控制器三个装星单机组成[10] 。HY-2A 微波散射计的基本工作过程为:微波发射机通过环形器与天线接通,向海面发射射频脉冲,散射回波信号被天线接收后,经环形器送到接收机,送至信号处理器。信号处理器对回波信号、内定标信号及纯噪声信号进行处理,地面处理系统综合各测量结果获得海面散射源的后向散射系数σ °、风场等。其主要性能技术指标见表1。
《表1》
表1 HY-2A微波散射计主要技术指标
Table 1 The technical specification of HY-2A scatterometer
《3 HY-2A微波散射计几何算法》
3 HY-2A微波散射计几何算法
《3.1 坐标系的定义》
3.1 坐标系的定义
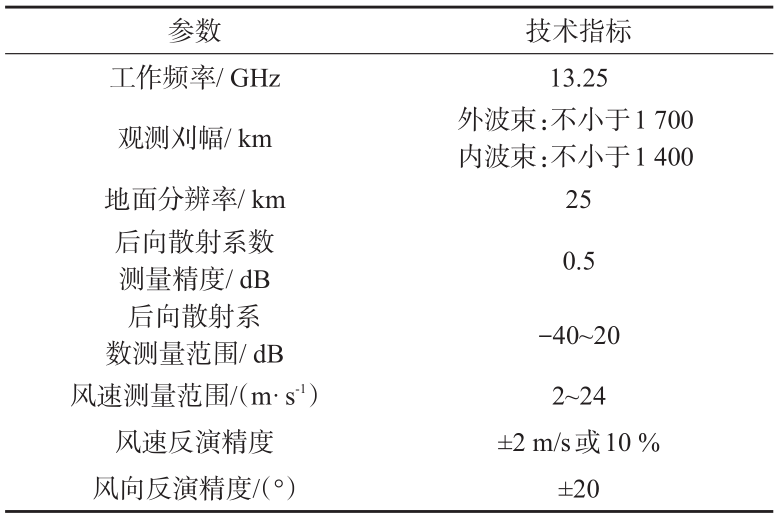
1)卫星局部直角坐标系。卫星局部直角坐标系定义如下(见图2):原点—卫星质心(s/c),S 轴— 指向T ×U,T 轴—指向U ×v,U 轴—指向r;其中,v 是卫星的惯性速度,r 是地心直角坐标系中卫星的位置矢量。如果卫星轨道的偏心率为0,则S 轴与速度 v 重合。
《图2》

图2 地心坐标系及卫星局部坐标系示意图
Fig.2 Geocentric coordinate system and spacecraft center coordinate system
2)卫星本体坐标系。卫星本体坐标系定义如下(见图3):原点—卫星质心(s/c),X b轴—指向卫星的正前方,Yb轴—指向卫星的右侧,Zb轴—指向卫星的天底方向。
《图3》
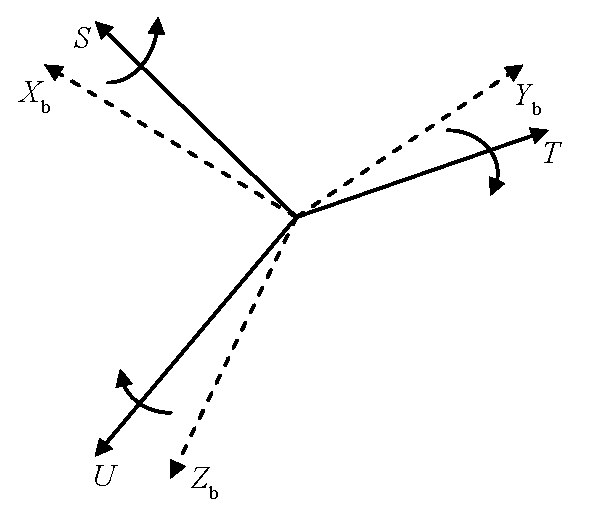
图3 卫星本体坐标系的定义
Fig.3 The local coordinate system of spacecraft
如果测滚、俯仰和偏航量都为0,则卫星的本体坐标系和局部坐标系重合。卫星的本体坐标系与局部坐标系可以通过围绕T、S、U 轴旋转P、R 和Y 角度(即俯仰、滚动、偏航)而互相转换。
3)地心直角坐标系。地心直角坐标系定义如下:原点—地球质心,X 轴—指向0°经线,Y 轴—垂直于X 轴,Z 轴—垂直于XY 轴构成的平面。
《3.2 面元中心定位》
3.2 面元中心定位
面元中心定位是指确定散射计扫描矢量与地面交点构成的面元中心的地理坐标,假设地球为椭球体,散射计扫描矢量与椭球体构成入射角 I,s 为观测方向的单位矢量,S 为斜距,n 为法向量,L 为散射计位置矢量,R 为面元中心点位置矢量。根据图4 所示的几何关系,可得

式(1)、(2)中,X、Y、Z 为面元中心坐标;e 为偏心率; 为长半轴;L=(x,y,z)散射计系统在地心坐标系下的坐标; s =(s1 ,s2 ,s3 )观测方向的单位矢量;S 为斜距,将公式(2)展开,带入式(1),整理后得
为长半轴;L=(x,y,z)散射计系统在地心坐标系下的坐标; s =(s1 ,s2 ,s3 )观测方向的单位矢量;S 为斜距,将公式(2)展开,带入式(1),整理后得

其中,

因此,利用式(4)至式(6)计算C1 ,C2 ,C3 ,求解二次方程(3),得到S 后再利用式(2)求解R 。
《图4》
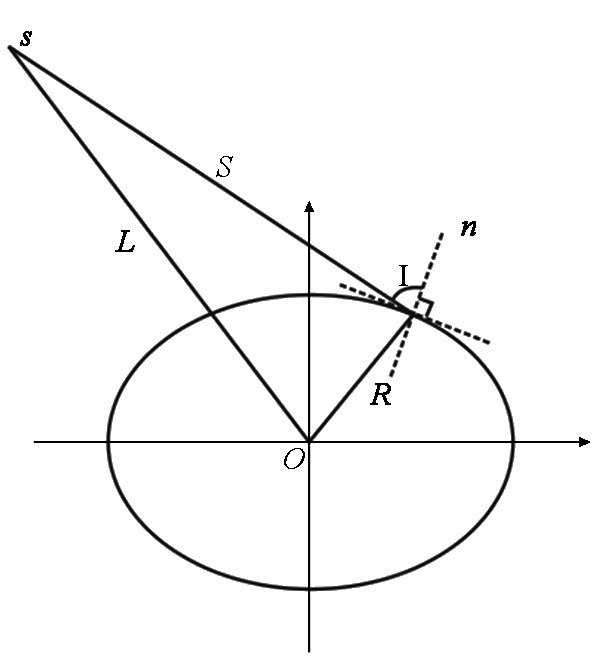
图4 散射计位置和观测方向矢量与椭球体的几何关系
Fig.4 Scatterometer location and the direction of observation vector and ellipsoid geometric relationships
s 矢量是散射计观测方向,也就是天线最大增益方向,每一个脉冲发射时刻的天线的最大增益方向可以由天线的方位角和观测视角来确定,s 矢量计算公式如下
式(7)~(9)中,L 为天线视角,(°);A 为天线方位角,(°)。
这里需要注意的是,此时的 s 矢量所处的坐标系为卫星本体坐标系,因此先要将其转换到卫星局部坐标系,再转换到地心坐标系 [11] 。
L 是卫星的位置矢量,HY-2A卫星自带了GPS 接收机,实时记录卫星在WGS-84坐标系下的三维坐标,记录频率为1 s/次,HY-2A散射计的脉冲重复周期(PRF)为5.52 ms,因此为获取每个面冲发射时刻的卫星的位置,需要利用GPS位置数据进行插值处理,通常采用三次样条函数插值法。
《3.3 定位精度分析》
3.3 定位精度分析
采用对比后向散射系数分布情况与海岛边界的方式对定位精度进行估算。选用海南岛作为评估的区域,后向散射系数分布如图 5 所示。图 5 中每个点的位置对应散射计测量脉冲的指向位置,颜色对应后向散射系数的大小。从图5中可以看出, HY-2A散射计后向散射系数分布在海陆边界,变化趋势明显,定位精度小于交轨向相邻两个脉冲之间的距离。在地图上测量可获得沿天线扫描方向相邻两点间距约为 17 km,据此可估算出定位精度为 5~8 km。
《图5》

图5 HY-2A卫星微波散射计内定位精度评价结果
Fig.5 Accuracy evaluation results of the HY-2A scatterometer inner beam
《3.4 计算波束入射角》
3.4 计算波束入射角
波束入射角定义为地球表面局部法矢量与卫星到面元中心方向矢量之间的夹角(见图4)。面元中心处的局部法向量为

式(10)中, 为地球的半长轴;b 为地球的半短轴。入射角可由下式计算:
为地球的半长轴;b 为地球的半短轴。入射角可由下式计算:

式(11)中, s 为矢量(R -r)的单位矢量,r 为卫星的位置矢量。
《3.5 计算观测方位角》
3.5 计算观测方位角
观测方位角是指天线波束的主瓣方向与观测面元中心所在经线构成的角度,在实际计算中,首先根据地球椭球体参数方程确定面元中心点的切平面方程,然后将面元中心点所在的经线、纬线以及观测方向单位矢量投影到该切平面,此时就可以根据投影方向矢量在投影经纬线上的分量计算观测方位角。
《4 HY-2A微波散射计物理量的计算》
4 HY-2A微波散射计物理量的计算
《4.1 信号通道测量值》
4.1 信号通道测量值
HY-2A散射计“信号通道”测量值是对数据快速傅立叶变换(FFT)变换后,2 MHz带宽内均分8块模平方累加的结果,每个数对应 1 个子带的能量值,按3 dB波束足迹计算,HY-2A散射计回波对应的信号带宽为 630 kHz,地面信号处理时需从信号通道 8 个测量值中选取对应的数累加(相邻 3 个数),得到足迹对应的回波能量。选取方法如下:a. 根据在轨卫星轨道高度确定足迹近端斜距、远端斜距;b. 计算足迹近端回波、足迹远端回波对应的频率。
计算公式如下:
式(12)、(13)中, 、
、 分别为足迹近端、足迹远端回波对应的频率;k 为发射线性调频信号调频斜率;Rn 、Rf 分别为足迹近端、足迹远端对应斜距;R0 为设计的参考斜距。根据、的具体数值来确定信号通道需要累加的 3 个切片能量值,从而得到信号通道的总能量值。
分别为足迹近端、足迹远端回波对应的频率;k 为发射线性调频信号调频斜率;Rn 、Rf 分别为足迹近端、足迹远端对应斜距;R0 为设计的参考斜距。根据、的具体数值来确定信号通道需要累加的 3 个切片能量值,从而得到信号通道的总能量值。
《4.2 雷达后向散射系数 σ 0 计算》
4.2 雷达后向散射系数 σ 0 计算
根据雷达方程,输入到散射计接收机的回波功率可表示为
式(14)、(15)中,λ 为波长;Pt 为雷达发射功率;La 为单程大气损耗;Lw 为单程波导损耗;Gt (θ ,ϕ ) 为发射天线增益;Gr (θ ,ϕ ) 为接收天线增益;R 为雷达到被测目标的距离;I 为天线方向图在观测面元内的积分项。
根据式(14),σ 0 可表示为

式(16)中,Pos 为接收通道输出端测得的回波信号功率;Lf 为内定标回路损耗系数;Pos,c 为接收通道输出端测得的内定标信号功率;Gc 为内定标时接收机自动增益控制值;Ge,AGC 为回波测试时实时对应的接收机自动增益控制值。
HY-2A 卫星获得的一轨雷达后向散射系数分布见图6,从图中可以看出海表、陆地以及南北两极的雷达后向散射系数呈现出各自的特征,后续的反演工作将在此基础上展开,如海面风场反演、陆地土壤水分反演、极地海冰反演等。
《图6》

图6 HY-2A微波散射计观测所得的雷达后向散射系数全球分布图
Fig.6 Global map of normalized radar backscatter coefficient acquired by HY-2A scatterometer
注:数据获取时间:2011-10-20
《5 结语》
5 结语
星载微波散射计数据预处理定义为从散射计 0 级数据出发,获取海面后向散射系数并进行几何定位的过程。一方面,预处理的结果是传感器工作性能、仪器状态的最直接的反映;另一方面也是进行海面风场反演及其他相关应用的基础,在整个散射计系统硬件研发和后续的数据应用中处于承上启下的位置,而显得非常重要,因此散射计数据预处理技术是本文研究的重点。目前,我们国家的 HY-2A卫星搭载的微波散射计传感器已经正常在轨运行,其工作机制与SeaWinds 相仿,各项性能技术指标均达到设计要求,在后续的海洋二号系列卫星中还将继续搭载散射计传感器,为改进提高仪器的性能,迫切需要对传感器获取的原始数据进行细致而深入的研究,为传感器相关参数的改进提供科学的依据,这是散射计数据预处理技术研究所关注的焦点,也是本文研究的意义所在。











 京公网安备 11010502051620号
京公网安备 11010502051620号




