

《1 前言》
1 前言
卫星雷达高度计目前已经成为重要的用于海洋动力环境测量的遥感器,其直接测量的产品包括海面高度、有效波高和海面风速。雷达高度计测量数据的进一步反演结果,可以应用于海洋地球物理学、海洋动力学、海洋气候与环境、海冰监测等方面。在国际上,以欧美为代表已发射了系列的高度计卫星,广泛应用于军事和民生领域,如 Topex/ Poseidon、Geosat、GFO、ERS-1、ERS-2、Envisat、 Jason-1、Jason-2等,目前最先进的高度计以Topex 和Jason-2为代表[1,2] 。
海洋二号(HY-2A)卫星是我国第一颗海洋动力环境卫星,其主载荷有:雷达高度计、微波散射计、微波辐射计和大气矫正辐射计。HY-2A雷达高度计是一个发射频 率为 13.58 GHz ±160 MHz 和 5.25 GHz±160 MHz的双频雷达高度计,采用脉冲有限工作方式测量海面高度、有效波高和海面风速等海洋基本要素。该仪器在20 m有效波高条件下测高精度为4 cm,在4 m有效波高条件下测高精度达2 cm,测高精度水平与Jason-2卫星高度计接近。
HY-2A卫星于2011年8月16日在太原卫星发射中心成功发射,至今雷达高度计工作正常,获得了大量的科学数据并已得到用户广泛应用。本文就HY-2A卫星雷达高度计系统设计和在轨初步结果进行论述。
《2 雷达高度计的系统设计》
2 雷达高度计的系统设计
《2.1 雷达高度计的回波信号模型》
2.1 雷达高度计的回波信号模型
雷达高度计通过发射线性调频信号并跟踪接收海面回波得到回波波形数据,再通过回波波形数据提取海面高度、有效波高和后向散射系数。由于海面粗糙度(波高)远大于雷达发射波长,采用布朗积分解法描述来自相干影响可以忽略不计、相当粗糙表面的垂直入射雷达回波。在这个方法中雷达高度计平均回波信号用三项卷积给出[3]

式(1)中, 是接收回波的平均功率;PFS(t)是平坦海面平均脉冲响应函数;qξ(t)是散射单元波高概率密度函数;Pγ( t ) 是雷达系统点目标响应。
是接收回波的平均功率;PFS(t)是平坦海面平均脉冲响应函数;qξ(t)是散射单元波高概率密度函数;Pγ( t ) 是雷达系统点目标响应。
根据雷达方程,平坦海面平均脉冲响应为

其中

式(2)、(3)中,U(t)是单位步长函数;I0(βt 1/2 )是改进的Bessel函数;H 是卫星高度;Re是地球半径;C 是光速;ξ 是偏离天底点指向角(或姿态角);γ 是天线波束宽度参数。
雷达观测海洋表面散射单元的波高概率密度函数qξ(t)呈不对称高斯形式,通过下式在时间域中给出

式(5)中,σξ 在距离-时间单元中是表面均方根(RMS)高度;λξ 是表面不对称参数。窄脉冲雷达系统点目标响应可用高斯函数近似

式(6)中,σP=0.425τ(τ为高度计分辨率)。由式(1)、式(2)、式(5)和式(6)可得到

式(7)中, 。
。
式(2)、式(5)、式(6)和式(7)的波形分别如图1a~图1d 所示。
《图1》

图1 海面回波卷积过程示意图
Fig.1 The diagram of ocean echo signal convolution
《2.2 系统指标设计》
2.2 系统指标设计
2.2.1 双频电离层校正设计
高度计校准电离层延迟的影响是通过双频测量来完成的,HY-2A 高度计采用中心频率分别为 13.58 GHz和5.25 GHz这两个工作频率来校正电离层影响。当采用双频进行测量时,HL 代表低频  测量的高度值,HU 代表高频
测量的高度值,HU 代表高频  测量的高度值,那么双频校正的高度测量结果 HT 为[1]
测量的高度值,那么双频校正的高度测量结果 HT 为[1]

式(8)中,  。如果两个频率测量的高度均方差分别为 δU 和 δL ,那么校正后的高度测量均方差δT 为
。如果两个频率测量的高度均方差分别为 δU 和 δL ,那么校正后的高度测量均方差δT 为

2.2.2 工作带宽选择
雷达高度计采用脉冲压缩体制进行高度测量,脉冲压缩的时宽对应着时间分辨率。320 MHz的线性调频信号经过脉冲压缩以后,对应的脉冲时宽为 3.125 ns,这个时宽也对应着高度计数字滤波器可分辨的测量距离。
选择 Ku 波段和 C 波段工作带宽为 320 MHz、 80 MHz 和 20 MHz,这 3 种信号带宽分别对应着 3.125 ns、12.5 ns和50 ns的脉冲压缩时宽。320 MHz 的带宽应用于海洋测量,80 MHz和20 MHz的带宽应用于海岸带、海冰和陆地的测量,3种带宽在轨自适应选择。
2.2.3 地面脉冲有限足迹
雷达高度计工作于脉冲有限状态,脉冲有限足迹的大小为[4]

式(10)中,h 为卫星高度;C 为光速;τ 为压缩后的脉冲时间宽度, ,σh 为 RMS 波高。在965 km的轨道高度,压缩后的脉冲宽度为3.125 ns,可以计算最小的脉冲有限足迹为1.9 km。
,σh 为 RMS 波高。在965 km的轨道高度,压缩后的脉冲宽度为3.125 ns,可以计算最小的脉冲有限足迹为1.9 km。
2.2.4 天线性能要求
为了实现电离层的延迟补偿,HY-2A雷达高度计采用双频体制,设计中Ku波段和C波段共享同一副抛物面天线。为了满足20 m有效波高的测量要求,在 963~965 km 的轨道高度范围内,Ku 波段天线的3 dB波束宽度不能小于1.1º;由于共享同一抛物面,C波段的3 dB波束宽度不能小于2.6º。
在上述前提下,天线增益应尽可能高以提高信噪比。根据信噪比要求,Ku波段天线增益≥42.5 dB, C波段天线增益≥32.5 dB。
2.2.5 发射机性能设计
在HY-2A雷达高度计中,采用Chirp信号最大带宽为 320 MHz,时宽为 102.4 μs,这样可以实现 32 768倍的压缩比,这样要求Ku波段的发射功率达到10 W,而C波段的发射功率达到20 W即可实现测量要求。
由于固态功率放大器体积小、寿命长等优点,在本系统中采用固态功率放大器。考虑到电磁兼容的需要,其谐波抑制要优于 40 dBc,杂波抑制要优于50 dBc。同时为了实现测高精度的要求,发射信号带内幅频特性起伏要在±1.0 dB以内,带内相频特性起伏在±10°以内。
2.2.6 接收性能设计
为了实现高灵敏度,要求 Ku 波段接收机的噪声系数小于 2.8 dB,C 波段接收机的噪声系数小于 1.8 dB,自动增益控制(AGC)设计的动态范围大于 60 dB,接收机的I/Q信号带宽在0~625 kHz范围内即可满足20 m有效波高测量的要求。
2.2.7 微波前端设计
高度计在轨的内校准过程是通过将发射信号的一部分耦合到接收机来实现的。利用测量的内校准信号对实际测量的回波信号进行补偿。
设计中发射信号耦合到接收机的耦合度为93 dB,为了避免发射信号对内校准信号的影响,微波前端要具有收发支路 110 dB 以上的隔离能力。同时满足开关时间小于5 μs的要求。
2.2.8 采样设计
高度计每 50 ms 产生一个回波波形,每个回波波形有128个距离门用来对回波信号进行采样。在下传的科学数据中包括回波波形采样数据。
高度计同时具备下传连续I/Q原始采样数据的能力,每个I/Q采样256个点,每个点量化数为8 bit。
2.2.9 海陆兼容跟踪器设计
高度计在轨测量时,必须保证在发射脉冲之后能够预测回波脉冲返回的时刻,为了做到这一点,高度计通过星上实时跟踪器来跟踪锁定每个回波脉冲。在HY-2A高度计中,首次采用模型兼容跟踪器[5,6] 来实现对回波的跟踪过程。在模型兼容跟踪器 中,采用最大似然跟踪(MLE)和重心跟踪(OCOG)并行的跟踪算法,并进行数据的融合处理,实现海陆兼容跟踪的目标。下面对模型兼容跟踪器中的MLE、OCOG和数据融合处理进行论述。
1)MLE。雷达高度计的回波符合指数分布, MLE实现的流程图如图2所示,实现的步骤如下[7,8] : a.将得到的高度计回波功率按延迟时间离散化,得到任意第i个距离门内波形采样的概率密度函数为 ; b. 构造最大似然函数
; b. 构造最大似然函数 ,其中k 表示距离门的总数;c.将平均回波信号的估值与采样信号比较,得到估计误差
,其中k 表示距离门的总数;c.将平均回波信号的估值与采样信号比较,得到估计误差 ;d.对估计误差做归一化处理,即
;d.对估计误差做归一化处理,即 ;e.计算似然估计加权窗
;e.计算似然估计加权窗 ;f.对加权后的误差信号进行累加,得到
;f.对加权后的误差信号进行累加,得到 、
、 ;g.将和经积分环路滤波器,使得、趋近于零,进而得到估计参数
;g.将和经积分环路滤波器,使得、趋近于零,进而得到估计参数 、
、 ,分别对应着测量时延(即高度值)、后向散射系数和波高。
,分别对应着测量时延(即高度值)、后向散射系数和波高。
《图2》

图2 MLE流程图
Fig.2 The schematic diagram of MLE
2)OCOG。在OCOG算法中,可以假设回波信号波形是以重心为中心呈对称分布的,其特点是可以生成线性误差,不依赖于任何回波模型。OCOG算法高度误差生成过程如图3所示。
《图3》
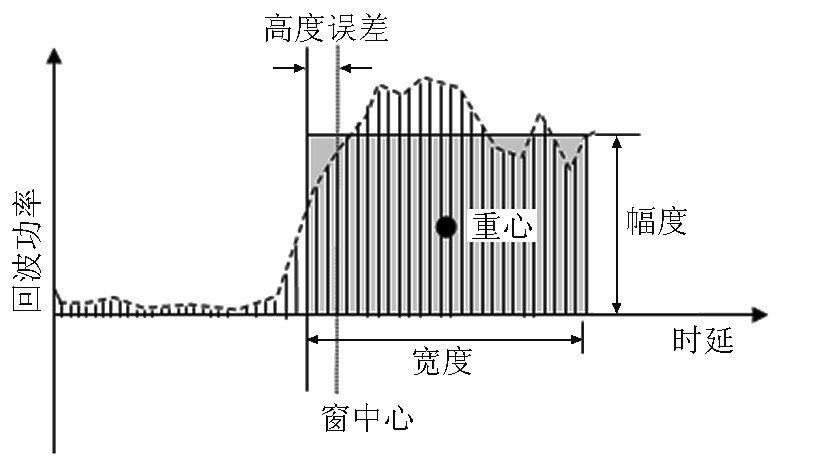
图3 OCOG算法示意图
Fig.3 The schematic diagram of OCOG algorithm
OCOG算法先假设回波的包络近似为矩形,处理程序如下[9] :a.找到回波的重心;b.设定回波功率的估计值(矩形的高)为重心功率值的两倍;c.将全部的采样点取和,即为矩形的面积;d.从矩形的高和面积确定矩形的宽度;e.从矩形的宽度和重心确定上升沿的位置;f.上升沿与窗中心的差值即为高度误差。
从上面的分析可以看出,OCOG算法的核心思想与模型无关,这使它具有强健的跟踪能力,不容易失锁,适用于各种表面的测量。OCOG算法可以得到高度误差和 σ 0 误差两个测量参数。
3)α-β滤波器。将OCOG算法得到的跟踪误差值输入到α-β滤波器,进而得到跟踪结果,在MLE跟踪器中的积分环路滤波器也采用相同的α-β滤波器形式。α-β滤波器有两项工作:首先实现低通滤波的功能;其次完成内插的功能,即将低速率的误差信号转换成高速率的环路控制信号。
图4给出了α-β滤波器示意图,左边为滤波部分,右边为线性内插部分。其中线性内插的输入部分(α-β分支)的更新速率为PRF/NA(PRF为脉冲重复频率,NA为计算误差信号需要的平均脉冲数);线性内插部分使得输出的速率为PRF以保证循环控制,这样就补偿了因为计算误差信号造成的延迟。
《图4》
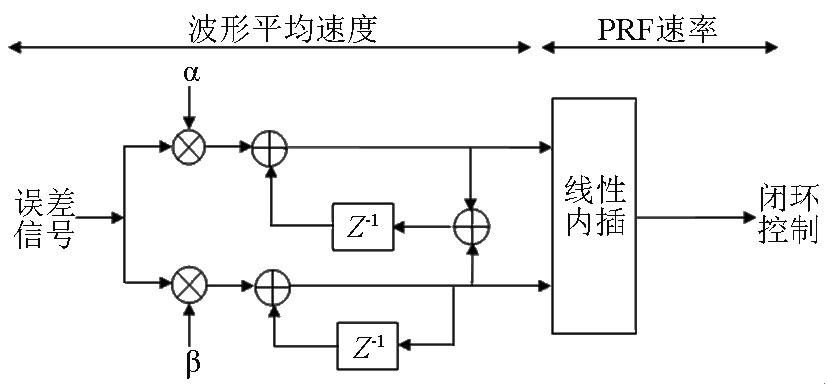
图4 α-β滤波器示意图
Fig.4 The schematic diagram of α-β filter
4)数据融合处理单元。在海洋测量方式下, MLE可直接输出高精度的测量结果(高度、浪高和后向散射系数),由于MLE与海洋回波模型相关,当回波信号来自海岸带、海冰或陆地等非海洋目标时,很容易引起MLE跟踪环失锁,即MLE对非海洋目标跟踪的健壮性较差。
由于OCOG跟踪器不依赖回波特性,可以在大范围内产生线性的误差信号,增强了跟踪器的健壮性,所以 OCOG 跟踪器在对海岸带、海冰和陆地的跟踪过程中具有明显的优势。但是 OCOG 跟踪器对海洋目标跟踪精度不如MLE高。
为了发挥这两种跟踪器各自的优势,在模型兼容跟踪器中采用 MLE 和 OCOG 并行工作,其中 OCOG始终工作,MLE在海洋上工作。这样当MLE 和OCOG同时锁定海洋目标时,数据融合处理单元输出MLE结果;当MLE失锁时,数据融合处理单元输出OCOG结果。这样就实现了优势互补,既保证了高的海洋跟踪精度,又实现了在海岸带、海冰和陆地的连续跟踪[5] 。图5给出了模型兼容跟踪器的组成框图。
《图5》

图5 模型兼容跟踪器组成框图
Fig.5 The block diagram of model compatible tracker
2.2.10 工作模式设计
HY-2A雷达高度计设计有在轨测试模式、测量模式和应急工作模式。
1)在轨测试模式设计。高度计开机上电后,根据默认的工作参数进行测量模式工作,并将测量数据下传到地面,在地面对下传的数据进行分析,以确认默认的工作参数是否需要调整。如果默认的参数不合适(如跟踪失败),此时经过数据注入进入在轨测试模式,该模式中将原始I/Q数据下传,测试人员对下传的原始数据进行分析,并对高度计工作参数进行调整。经过一段时间的调整后找到最佳的工作参数,即完成在轨调试。之后高度计即按调整后的工作参数进行测量模式工作。
2)测量模式设计。高度计测量模式又可分为噪声偏置测量、内校准测量、捕获测量、跟踪测量、总线通信、高速数据传输和仪器监测等子模式。
噪声偏置测量:完成雷达高度计硬件系统的噪声和偏置值的测量,并以此来确定高度计的捕获、跟踪门限,同时对回波信号进行校正。
内校准测量:高度计每隔30 s左右对内校准信号进行采集,并将采集的结果打包下行。
捕获测量:根据捕获范围和捕获门限,捕获高度计回波信号。捕获测量是跟踪测量的前提,通过捕获测量使回波信号出现在跟踪窗内。
跟踪测量:该项测量是高度计工作的核心,HY-2A 高度计采用模型兼容跟踪器,实时输出跟踪结果和回波采样数据。
总线通信:通过1553B总线与卫星数管单元进行通信,获取卫星当前的星务信息(如时间码、姿态数据等)以及地面注入数据,并通过1553B总线下传仪器监测数据。
高速数据传输:高度计将实时产生的科学数据打成数据包,通过高速串行方式传给卫星的大容量存储器,当卫星过境时将数据传到地面接收站。
仪器监测:高度计每隔30 s左右对仪器各单机的监测信号进行采集,并将采集的数据打成软通道遥测数据包,再通过1553B总线下行。
3)应急工作模式设计。当高度计出现故障的时候,进入应急工作模式。当遥测出现异常或科学数据出现异常的时候,地面应用系统发出进入应急工作模式指令。应急指令包括高度计软复位指令、仪器开关机指令和主备切换指令。
2.2.11 系统方案设计
雷达高度计系统设备由11台单机组成,组成框图如图6所示,各单机的功能如下。
《图6》

图6 HY-2A雷达高度计硬件组成框图
Fig.6 The block diagram of HY-2A radar altimeter hardware
注:TM/TC为遥测遥控信息;OBDH为星载数据管理系统
天线单元:雷达高度计的天线为抛物面天线,两个工作频率共享一个反射面。天线增益分别为大于42.5 dB(Ku波段)和大于32.5 dB(C波段)。天线的安装指向角为指向天底点,对地指向精度为 0.1°。
微波前端:系统中的微波前端包括 Ku 波段前端和C波段前端两个单机,它们分别包括主备转换机械开关、环形器、微波电子开关、固定衰减器、定向耦合器等电路。整个前端网络受指令控制,实现发射、接收和内校准开关控制,收发支路的总隔离为110 dB。
功放单元:该单元包括Ku波段功率放大器和C波段功率放大器两个单机,这两个功放都是脉冲固态功放,发射的峰值脉冲功率分别为10 W和20 W。
发射单元:该单元包括直接数字 Chirp 信号合成器(DDS)组件、发射变频组件和本振变频组件。在控制信号的触发下,由DDS生成的Chirp信号经过倍频和变频等处理,生成 13.58 GHz±160 MHz 和 5.25 GHz±160 MHz 的发射信号,这两组发射信号提供Ku波段和C波段功放的输入。该单元同时生成13.10 GHz±160 MHz和4.77 GHz±160 MHz的去斜本振信号。
接收单元:该单元包括Ku波段接收机和C波段接收机两个单机,它们分别包括低噪声放大器、去斜坡混频器、中频接收和相位检波器等组件,最终生成正交的I/Q信号。
频综单元:该单元提供仪器各部分所需的工作频率。
控制与处理单元:该单元完成对正交 I/Q 通道的采集、快速傅里叶变换(FFT)、模型兼容跟踪处理、时序控制等功能;完成与卫星平台的通信,即通过1553B总线获取卫星星务信息(包括时间码、姿态码、注入数据等)并采集和发送软通道遥测数据,同时将高度计产生的科学数据通过高速串行方式发送到卫星星务系统。
供配电单元:将卫星平台提供的28 V母线电源变换成仪器所需要的各品种的二次电源。
《2.3 仪器的测高误差分配及指标》
2.3 仪器的测高误差分配及指标
高度计仪器的测高精度取决于仪器误差,高度计的仪器误差可分为固定偏差和随机误差,其中固定偏差可以通过定标来修正,因此随机误差决定高度计仪器的测量精度。在分析高度计测高精度的时候,只进行随机误差的分析。
高度计的随机误差分配到仪器的相关部件当中,由于这些误差相互独立,总的RMS误差满足下面公式

式(11)中, σ R 为总的均方根误差, 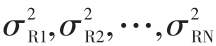 为各个相关部件误差的方差,高度计误差分配如表1所示。
为各个相关部件误差的方差,高度计误差分配如表1所示。
《表1》
表1 HY-2A雷达高度计误差分配表
Table 1 The error sources of HY-2A radar altimeter

HY-2A雷达高度计系统指标如表2所示。
《表2》
表2 HY-2A雷达高度计系统指标
Table 2 HY-2A radar altimeter characteristics

《3 HY-2A雷达高度计在轨运行初步结果》
3 HY-2A雷达高度计在轨运行初步结果
从HY-2A卫星发射入轨开始工作后,雷达高度计获得了大量有效的观测数据。图 7 是在 MLE 模式下获取的 20 Hz 海面回波波形数据,图 8 是在 OCOG 模式下获取的 20 Hz 陆地回波波形数据,图 9 是在 OCOG 模式下获取的 20 Hz 冰面回波波形数据。
《图7》

图7 MLE下的Ku波段海面回波(a)和C波段海面回波(b)
Fig.7 Ku band sea echo(a)and C band sea echo(b) by MLE
《图8》
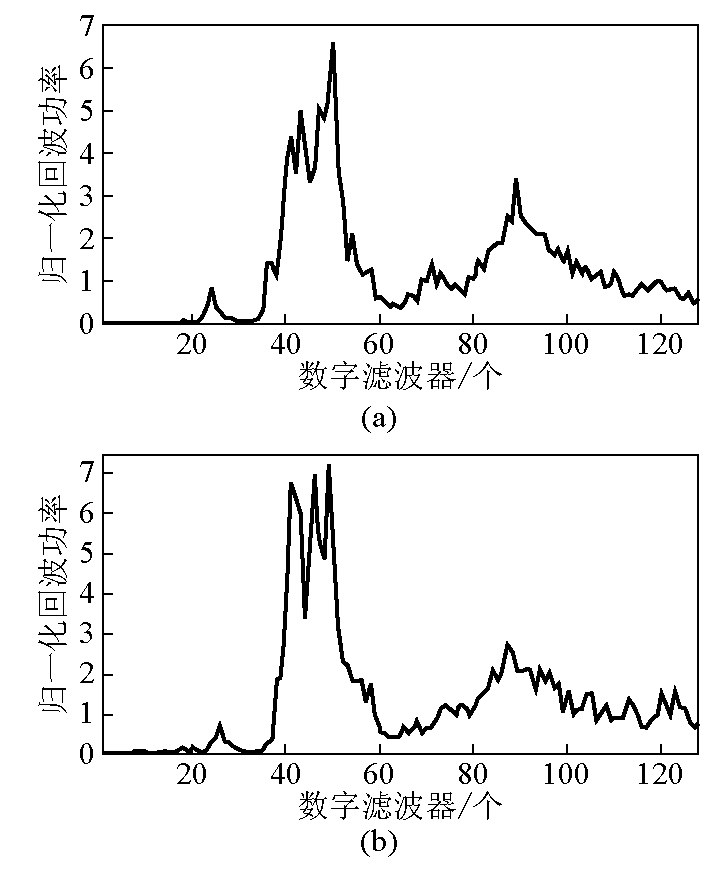
图8 OCOG下的Ku波段陆地回波(a)和C波段陆地回波(b)
Fig.8 Ku band land echo(a)and C band land echo(b) by OCOG
《图9》
图9 OCOG下的Ku波段冰面回波(a)和C波段冰面回波(b)
Fig.9 Ku band ice echo(a)and C band ice echo(b) by OCOG
图10~图12是反演得到的24 h的海面高度、有效波高和海面风速产品。
《图10》

图10 HY-2A高度计24 h的海面高度产品
Fig.10 Sea surface height product of HY-2A altimeter for 24 h
《图11》
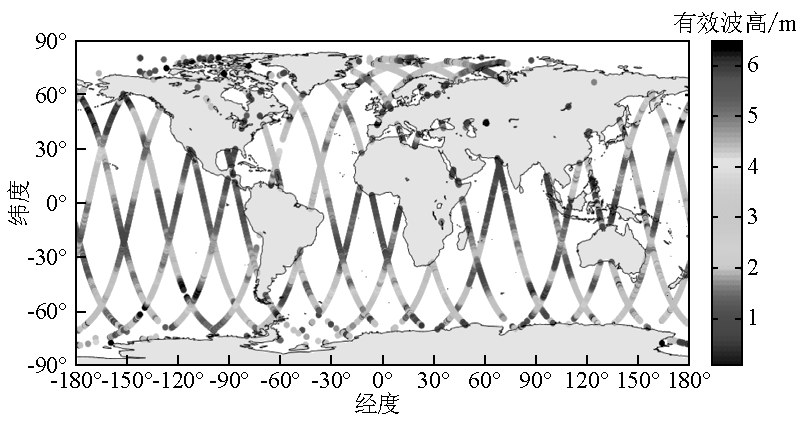
图11 HY-2A高度计24 h的有效波高产品
Fig.11 Significant wave height product of HY-2A altimeter for 24 h
《图12》

图12 HY-2A高度计24 h的海面风速产品
Fig.12 Wind speed product of HY-2A altimeter for 24 h
《4 结语》
4 结语
HY-2A卫星是我国第一颗海洋动力环境卫星,发射入轨后雷达高度计正常工作,并获得了大量的科学数据。目前,国内外用户单位的反演结果表明 HY-2A 雷达高度计达到了设计要求,仪器运行稳定,可以业务化应用。
HY-2A 雷达高度计的成功验证了其系统设计的正确性;系统中首次采用了模型兼容跟踪器技术,实现了MLE和OCOG的并行工作,结果证明其在陆地、近海和海岸带之间能够连续测量不失锁,并保证了高精度的海洋目标测量;同时系统中首次采用的自主研制的固态功率放大器、Ku波段和C波段微波前端、大时带积的DDS信号产生器等创新技术也得到了验证。
《致谢》
致谢
本文图10~图12是国家卫星海洋应用中心的贾永君博士反演的结果,在此对贾永君博士表示感谢。











 京公网安备 11010502051620号
京公网安备 11010502051620号




