
2002年 第4卷 第9期
动态二叉树表示环境的A*算法及其在足球机器人路径规划中的实现
1.广东工业大学计算机学院
2.广东工业大学自动化学院,广州 510090
下一篇 上一篇
摘要
提出采用二叉树表示二维空间的方法,对全局路径规划和局部路径规划进行综合考虑,设计移动机器人在复杂环境下对动态障碍物进行避障的A*算法。在足球机器人系统中进行仿真,将二叉树动态地表示球场的机器人与目标为对角线的矩型环境,使搜索范围随搜索进程动态地减小,实现了路径规划的整体优化。
图片
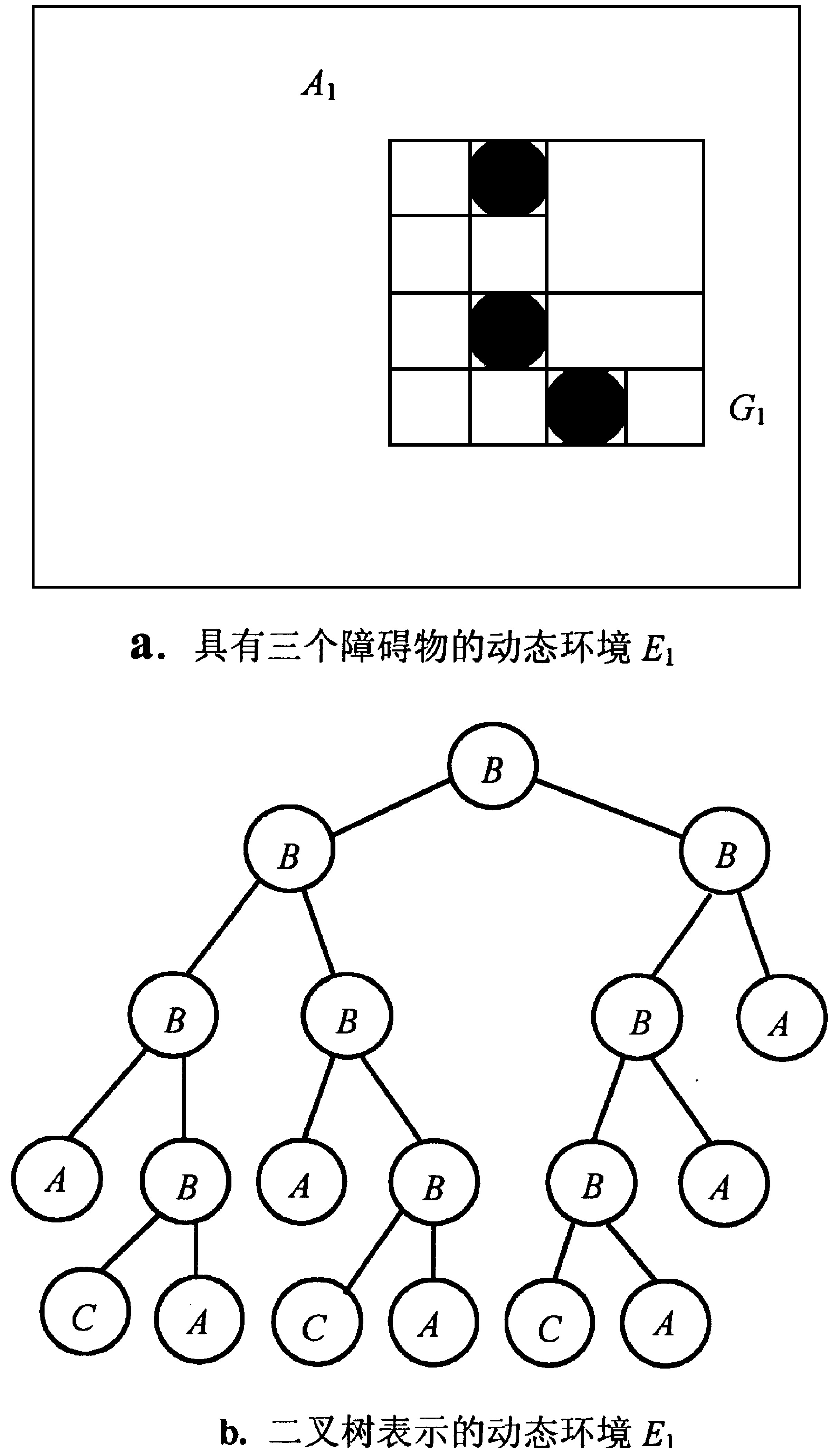
图1
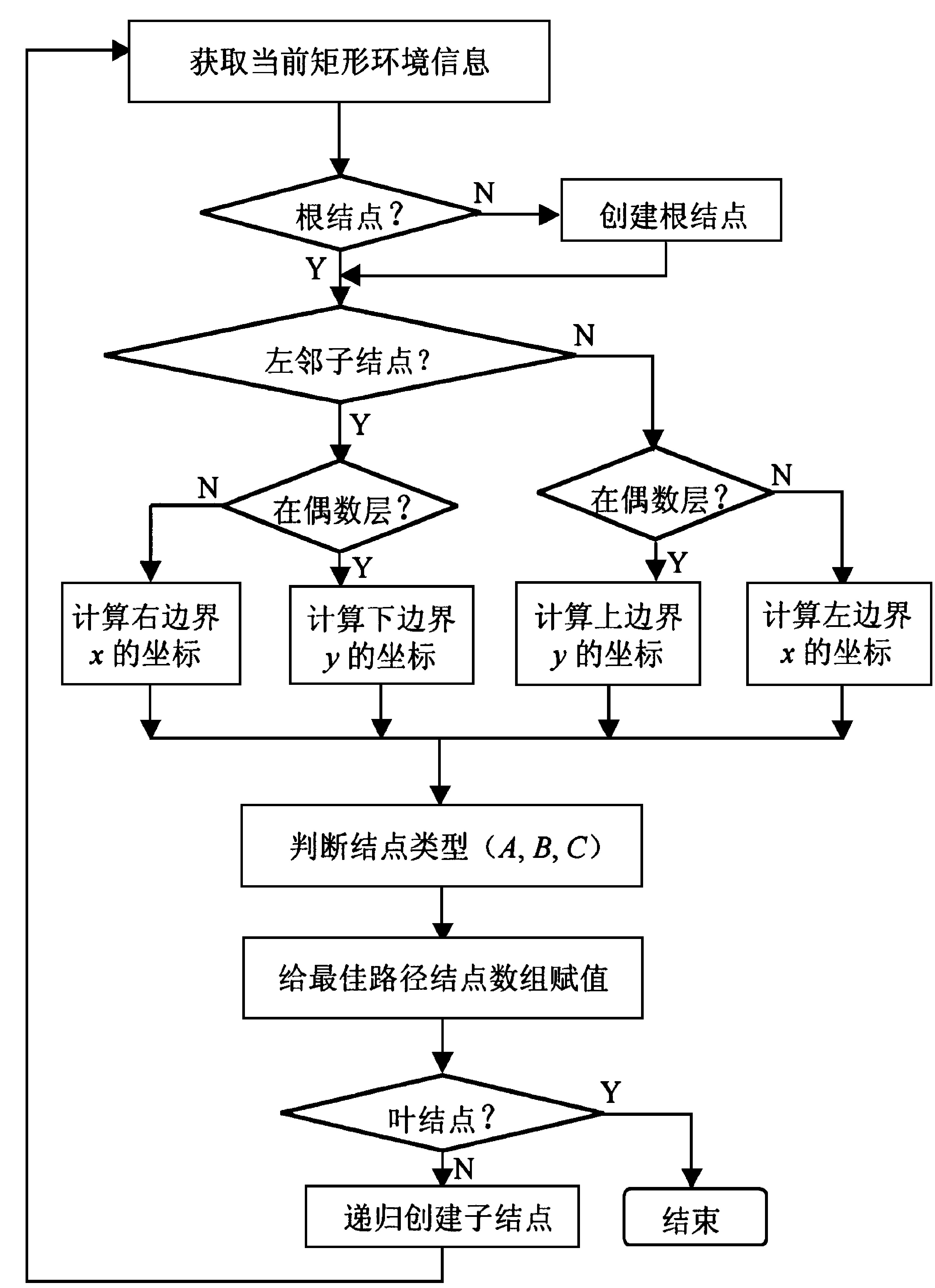
图2
参考文献
[ 1 ] NoborioH , NaaniwaT , ArimotoS .Afeasiblemotion planningalgorithmforamobilerobotonaquadtreerepresentation[A].ProcIEEEIntConfRobotandAutomation[C], 1989.327~332
[ 2 ] 李 强, 林良民, 颜国正.一种新的移动机器人环境模型[J].机器人, 1999, 21 (5) :379~385 链接1
[ 3 ] 张 育.移动机器人路径规划算法研究[D].上海:上海交通大学, 1996
[ 4 ] 蔡自兴, 徐光佑.人工智能及其应用[M ].北京:清华大学出版社, 1996 链接1
[ 5 ] 严慧敏, 吴伟民.数据结构[M ].北京:清华大学出版社, 1996 链接1











 京公网安备 11010502051620号
京公网安备 11010502051620号




