
2003年 第5卷 第5期
移动机器人障碍躲避的最佳路径
甘肃工业大学电气与信息工程学院,兰州 730050
下一篇 上一篇
摘要
提出一种以障碍物和机器人位置和速度等信息为基础的障碍躲避方法,重点探讨了确定性环境下障碍躲避和转弯过程中机器人应遵循的合理路径问题,并通过证明指出了给定环境条件下实现转弯和障碍躲避的最佳路径。仿真实验表明,该结论简单有效,便于实施,具有较高的应用价值。
图片
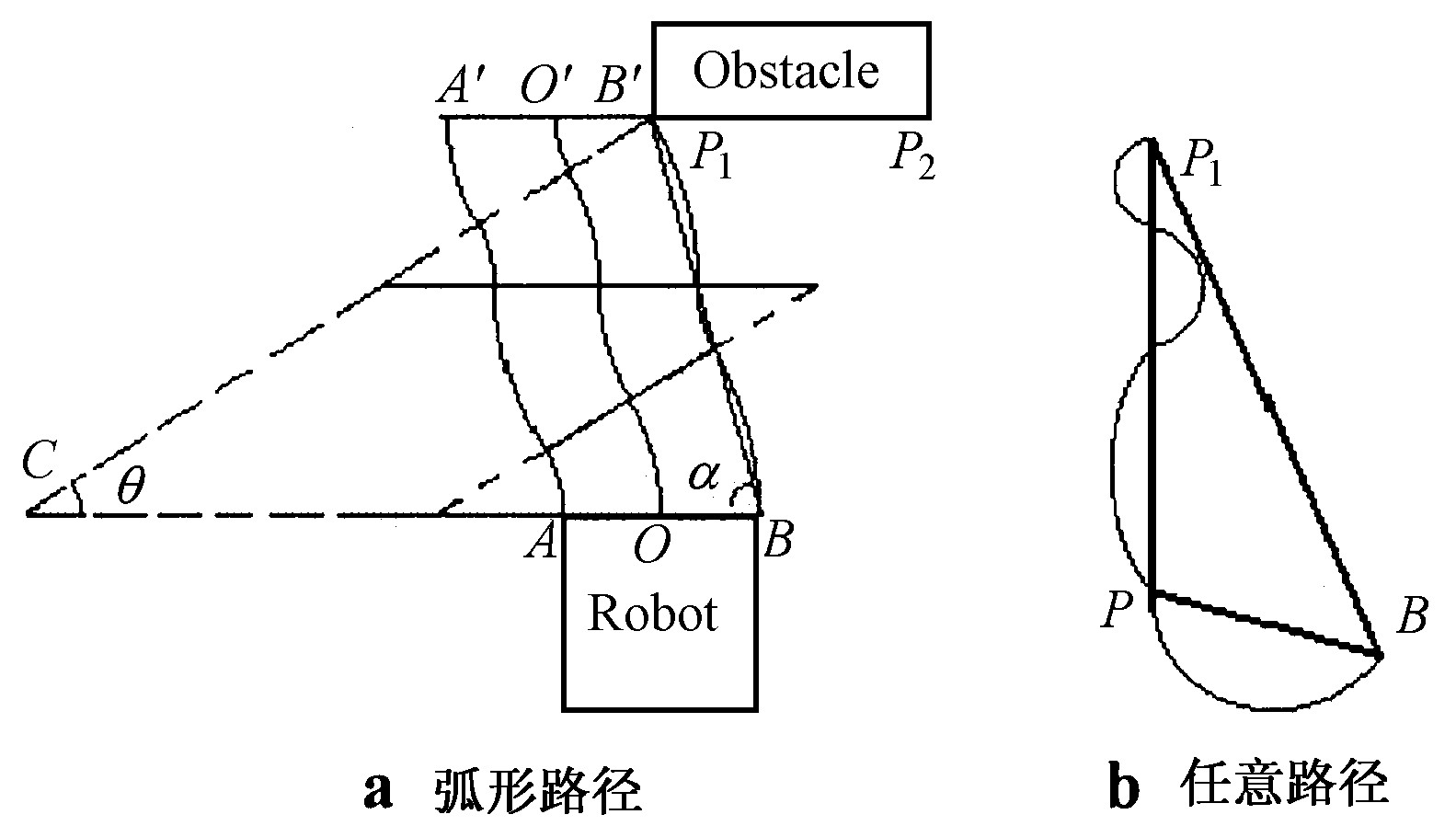
图1
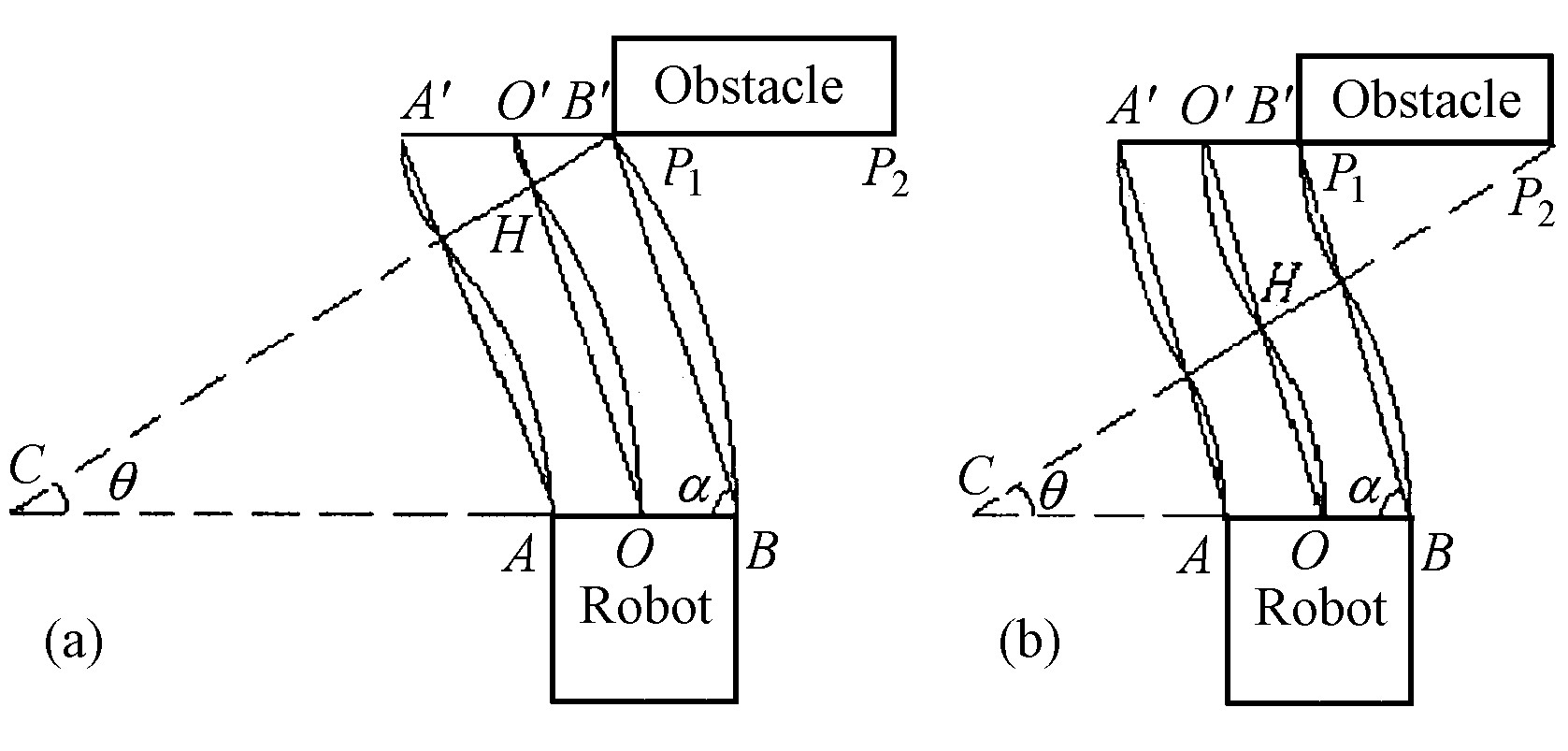
图2
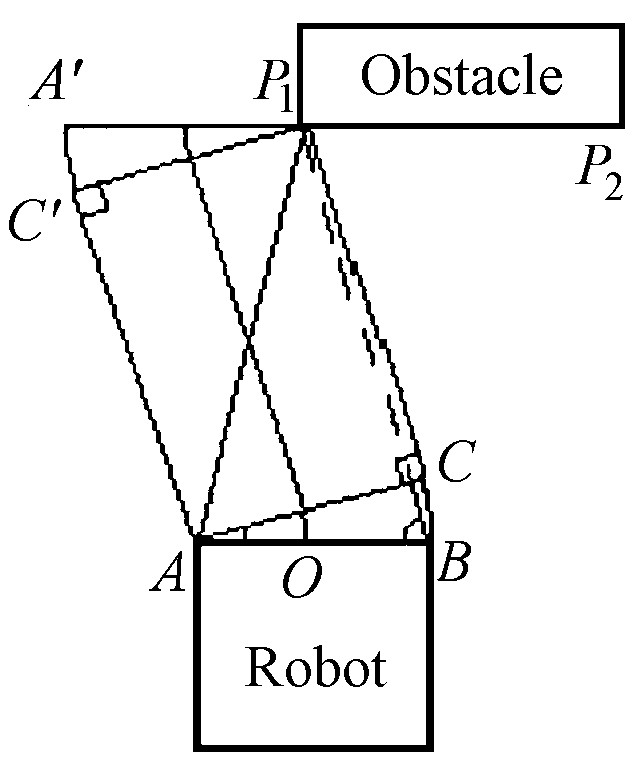
图3

图4
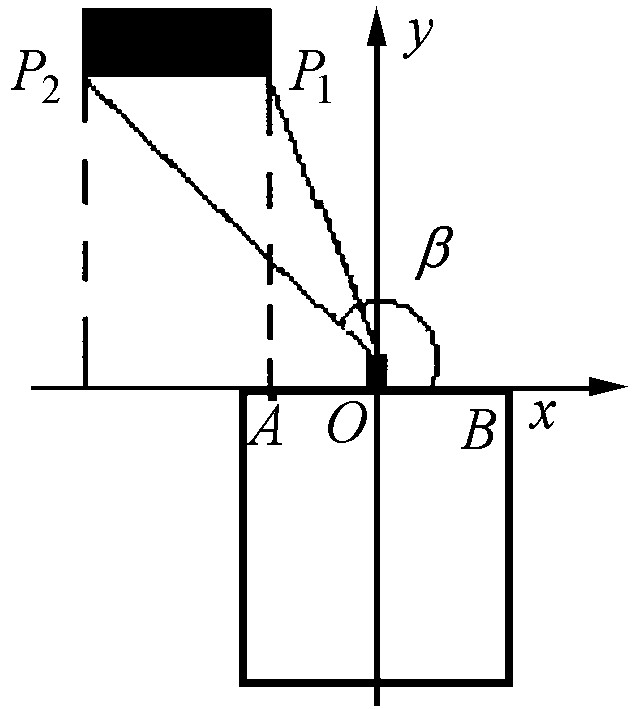
图5
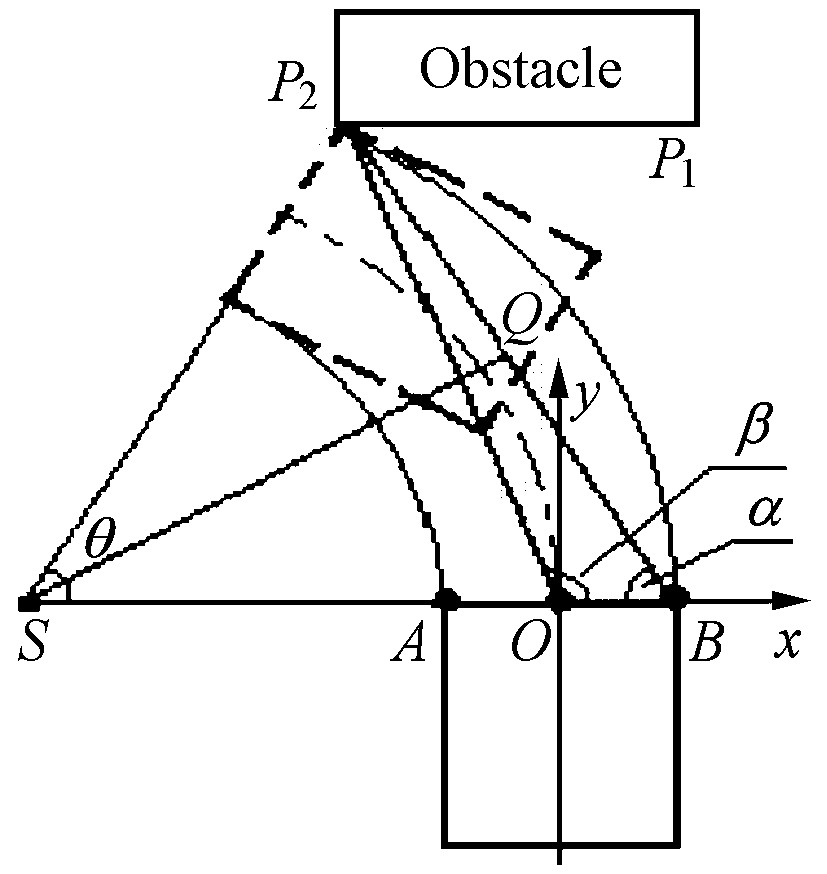
图6
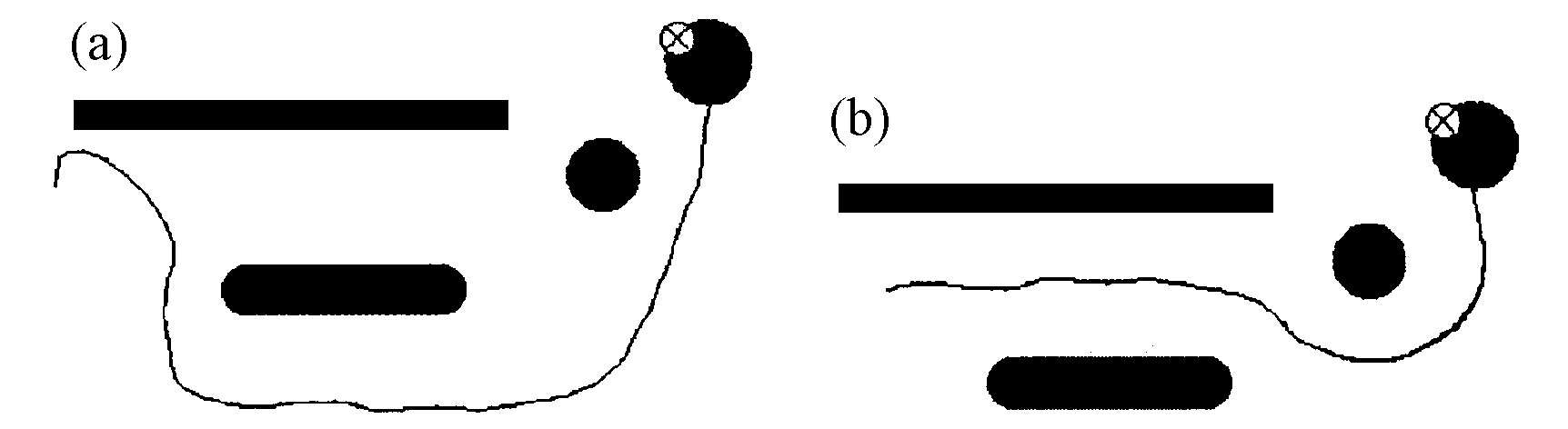
图7
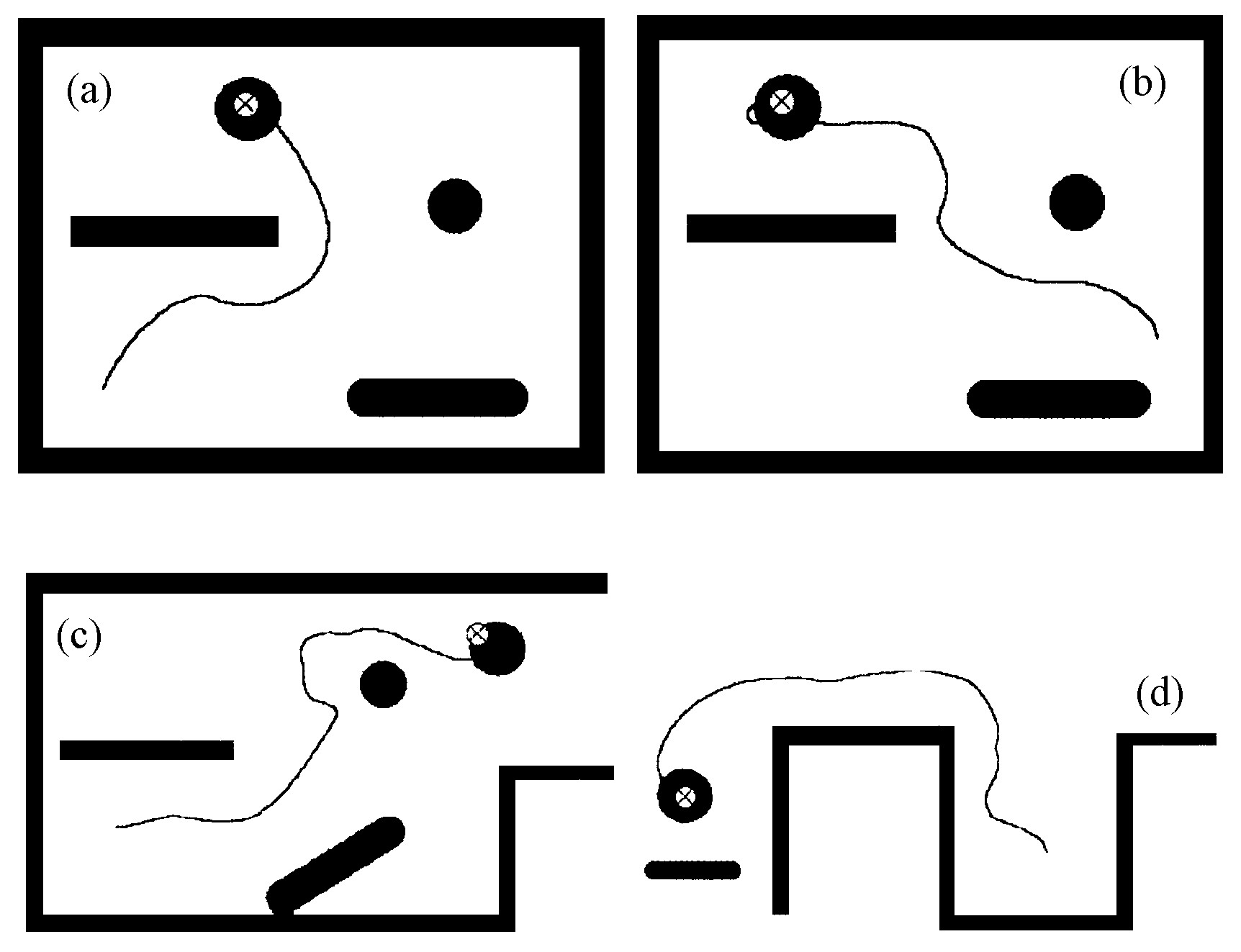
图8
参考文献
[ 1 ] BorensteinJ .Mobilerobot positioning:sensorsandtechniques[J].JournalofRoboticSystems, 1997, 14 (4) :231~249
[ 2 ] DenmeadeT .Apioneer’sjourneyintothesarcophagus[J].NuclearEngineeringInternational, 1998, 43 (5) :18~20
[ 3 ] HayatiS .Micro roverresearchforexplorationofmars[J].RoboticsandAutonomousSystems, 1997, 22 (3) :377~392
[ 4 ] CraneCD .Akinematicalanalysisofthespacestationremotemanipulatorsystem (SSRMS) [J].JournalofRoboticSystems, 1991, 8 (5) :637~658
[ 5 ] ThrunS .Minerva:Asecond generationmuseumtour guiderobot[J].MachineLearning, 1998, 33 (1) :41~76 链接1
[ 6 ] HagerN .Cocoaatthevisualprogrammingchallenge1997[J].Computing, 1998, 9 (2) :151~169
[ 7 ] ThrunS .Learningmetric topologicalmapsforindoormobilerobotnavigation[J].AIJournal, 1998, 99 (1) :21~71
[ 8 ] ErbG .Canada’smobileservicingsystem[J].SpaceTechnology, 1990, 10 (1) :19~25
[ 9 ] AndreasK .Constructingmapsformobilerobotnavigationbasedonultrasonicrangedata[J].IEEETransactiononSystems, ManandCybernetics, 1996, 26 (2) :233~242
[10] DubinsLE .Oncurvesofminimallengthwithaconstraintonaveragecurvatureandwithprescribedinitialandterminal positionsandtangents[J].AmericanJournalofMathematics, 1957, 79:497~516
[11] ReedsJA , SheppLA .Optimalpathsforacarthatgoesbothforwardsandbackwards[J].PacificJournalofMathematics, 1990, 145 (2) :67~393
[12] ReisterDB , PinFG .Time optimaltrajectoriesformobilerobotswithtwoindependentlydrivenwheels[J].InternationalJournalofRoboticsResearch, 1994, 13 (1) :38~54
[13] BalkcomDJ, MasonMT .Timeoptimaltrajectoriesforboundedvelocitydifferentialdriverobots[J].IntJournalofRoboticsResearch, 2001, 20 (4) :402~409











 京公网安备 11010502051620号
京公网安备 11010502051620号




