
2004年 第6卷 第1期
航天器高精度GPS导航定位技术研究
中国空间技术研究院总体设计部,北京 100086
下一篇 上一篇
摘要
将GPS测量定位技术、求解卫星轨道摄动运动的Encke方法和广义Kalman滤波技术有机地结合在一起,提出了利用GPS实现低轨道航天器高精度自主导航定位的新方法——载波相位-伪距综合动态定轨技术,解决了GPS载波相位应用中动态解模糊和跳周修复的难题。以此为基础,提出了两个航天器之间的载波相位-伪距综合差分动态相对导航技术。数值仿真分析和半物理仿真实验结果表明,所提出的动态定轨技术是可行的,对提高GPS导航定位精度的效果是显著的,并且其模型、算法和软件具有工程实用性。
图片
图1
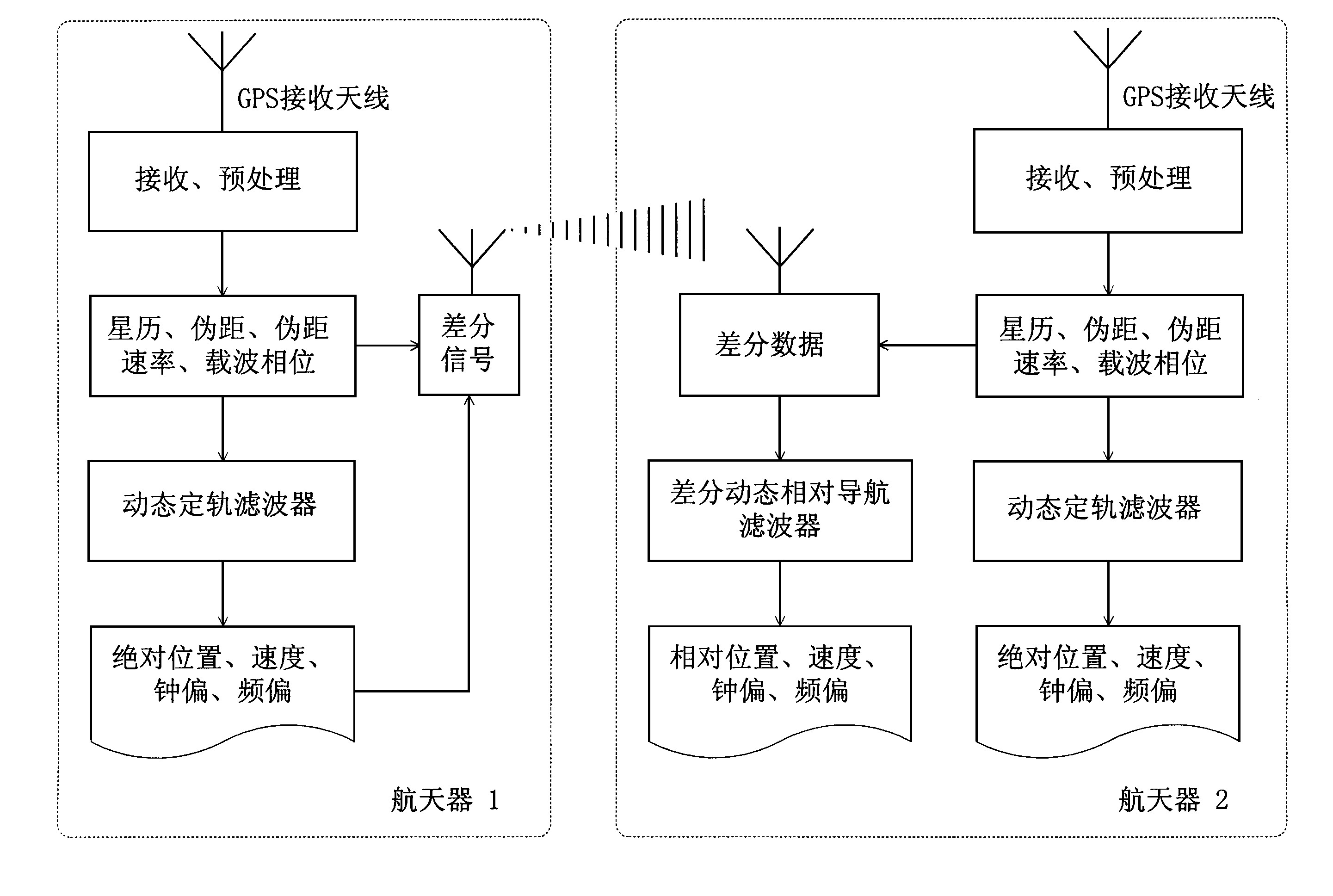
图2
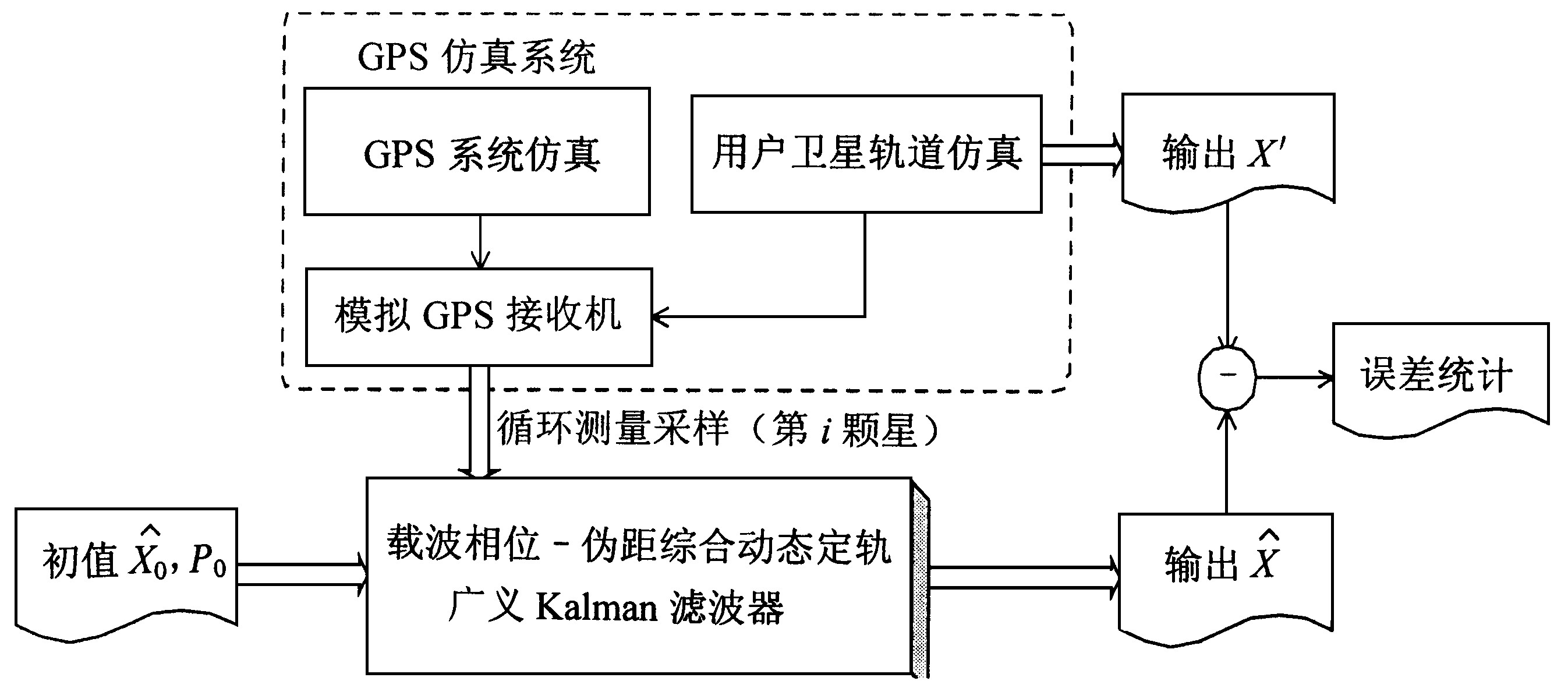
图3
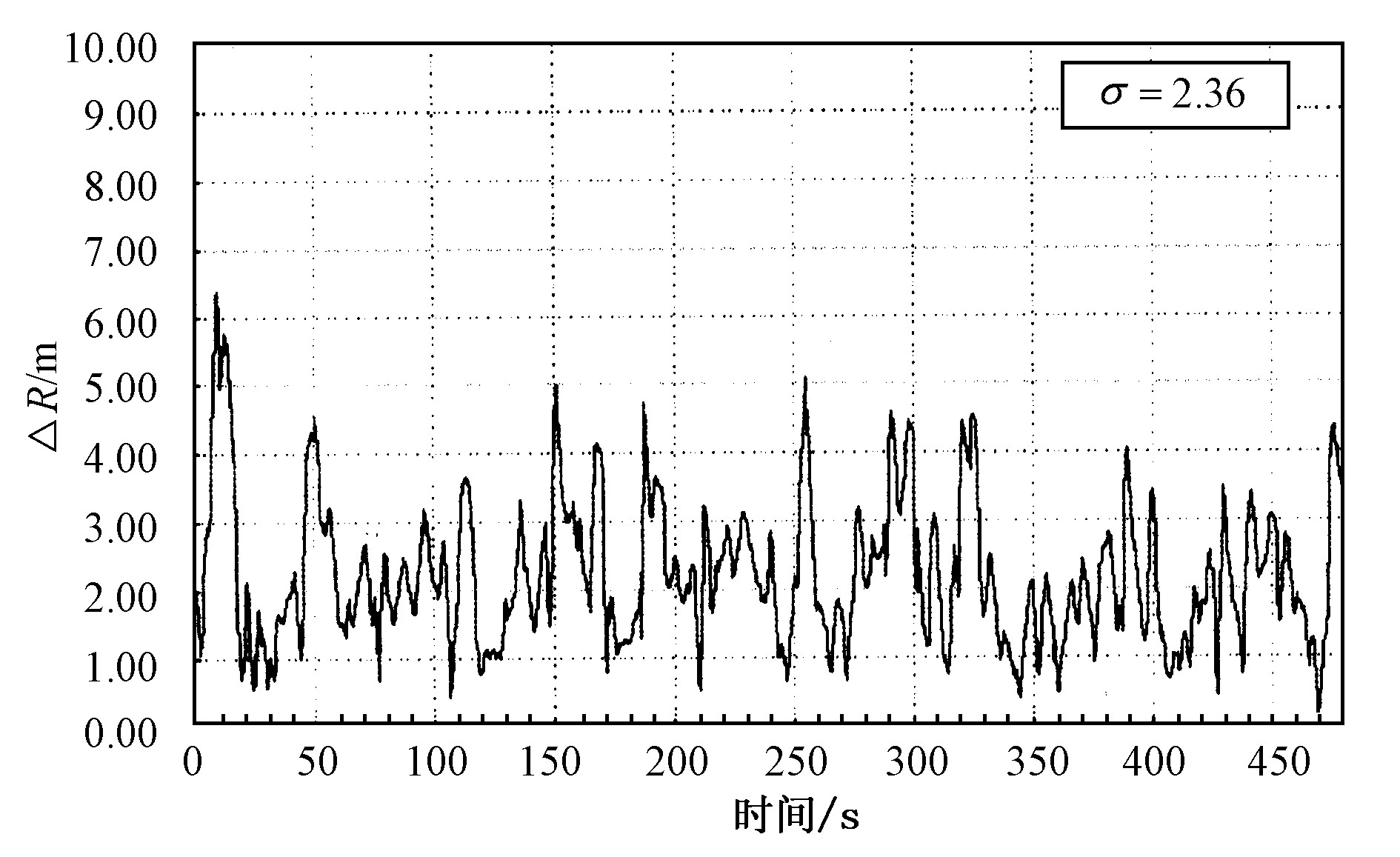
图4

图5

图6
图7

图8
参考文献
[ 1 ] ParkinsonBW , SpilkerJJJr, AxelradP , etal.GPS理论与应用[M ].吴晓进, 等译.西安:西安导航技术研究所, 1999
[ 2 ] DiPrinzioMD , TolsonRH .EvaluationofGPSpositionandattitudedeterminationforautomatedrendezvousanddockingmissions[R ].NASAContractorReport4614, 1994
[ 3 ] 向开恒.航天器高精度GPS导航定位技术研究[R].中国空间技术研究院博士后研究报告, 2002
[ 4 ] 肖业伦.航天器飞行动力学原理[M ].北京:宇航出版社, 1995
[ 5 ] 詹 虎.Aninvestigationoncollocatedgeostationarysatellites[D].北京:北京航空航天大学, 1996











 京公网安备 11010502051620号
京公网安备 11010502051620号




