《1 引言》
1 引言
随着经济的迅速发展, 单一的运输方式越来越不能满足来自客户的敏捷制造、快速响应市场、物流供应链管理等诸多方面的需求。多种运输方式的联合运输——多式联运为之提供了相应的解决方案。多式联运就是采用两种或者两种以上的运输方式把货物从起始点运送到目的地
[1 ] 。
我国加入WTO后, 国外大型企业纷纷到大陆投资建厂, 物流企业在为跨国公司进行长距离原材料采购和产成品物流运输时, 多采用多式联运, 以弥补单一运输方式的不足, 最终实现货物高效、快捷运输, 满足客户的需求。多式联运还可以减少交通拥堵, 降低交通基础设施的使用强度。此外, 多式联运对降低环境污染和缓解能源紧张具有重大的现实意义。
基于对多式联运与日俱增的需求, 国内外学者对多式联运的相关研究工作也越来越关注。其中, Angelica Lozano等研究了多式联运下的最短可行路径问题, 并通过顺序算法进行求解
[2 ] 。张建勇等从实现总成本最小化的原则出发, 建立了一种多式联运网络的最优分配模型, 从定量角度分析了多式联运系统的合理组织模式
[3 ] 。王涛等对多种运输方式的运输特性进行分析后, 提出了运输方式组合优化模型, 并给出求解算法
[4 ] 。这些工作系统地研究了多式联运的最短可行路径及运输方式优化组合等相关问题, 但对于运输时间和费用未曾涉及。为此, 笔者提出了一个适用于多节点、长距离的多式联运运输网络问题, 并运用系统的理论和方法, 建立多式联运下的路径最短时间模型, 并求得与之对应的路径的运输费用, 为今后的相关研究工作提供理论基础。
《2 问题的提出与符号定义
[5,6]》
2 问题的提出与符号定义
[5,6]
假设某物流企业把货物从起始点运送到目的地, 中途经过若干个节点, 任意相邻的两个节点之间有若干种运输方式。在复杂的多式联运运输网络中, 每个节点处都可能发生运输方式的转换, 每次转换将对应一条新的路径 (见图1) , 在节点处还要考虑运输方式的转换时间和可能发生的货运延迟。
《图1》
图1 多式联运运输网络
Fig.1 Networks of multimodal transportation
τ x i j i j x t ) —在t 时刻从节点i 以x 运输方式到达节点j 的运输时间;
ξ x y i k j i k j x y t ) —在t 时刻以x 运输方式沿弧 (k , i ) 进入节点i , 在节点i 处转换到y 运输方式沿弧 (i , j ) 到节点j , 运输方式转换时间及以外的延迟时间;
λ x i k i k x t ) —在t 时刻以x 运输方式沿弧 (k , i ) 进入节点i , 在节点i 处以x f D 的路径时间;
π x i k i k x t ) —在t 时刻以x 运输方式沿弧 (k , i ) 进入节点i , 在节点i 处以x f D 的选择路径;
c x i , j i , j x i 到节点j 选择第x 种运输方式的单位运输费用;
d x i , j i , j x i 到节点j 选择第x 种运输方式的运输距离;
s x y i i x y i 处由第x 种运输方式转换到第y 种运输方式的中转费用;
在多式联运的运输网络中, 笔者假设运量在节点处不能分割, 即在某一特定节点只能选择一种运输方式到达另一节点。
《3 路径和费用模型》
3 路径和费用模型
笔者定义有向图G = (V , E , T , M ) 为多式联运运输网络模拟图, 其中V 为运输网络的节点集合; E 为运输网络的弧集合; T ={t 0 , t 0 +Δt , t 0 +2Δt , t 0 + (|T |-1) Δt }为离散的时间集合;Δt 为离散时间间隔; M 为运输方式集合 (包括公路运输、铁路运输、水路运输3种运输方式) 。因此, 模拟图G 实际是3个子图的集合, 即G =G T ∪G R ∪G W , 其中G T 模拟公路运输网络, G R 模拟铁路运输网络, G W 模拟水路运输网络。V T , V R , V W 分别代表通过公路运输、铁路运输、水路运输模式能够到达的节点。此处, I 1 =V T ∩V R ≠∅, I 2 =V T ∩V W ≠∅, 和I 3 =V R ∩V W ≠∅表示节点处存在运输方式转换的可能性。
在模拟图G 中, Τ={τ x i j i j x t ) }为运输时间集合, τ x i j i j x t ) 表示t 时刻从节点i 以x 运输方式到达节点j 的运输时间。除此之外, ξ x y i k j i k j x y t ) 表示在t 时刻从节点k 经过节点i 到达节点j , 从运输方式x 到运输方式y 的转换时间及可能发生的货运延迟。如果ξ x y i k j i k j x y t ) =∞, 表示在节点i 处从运输方式x 换乘到运输方式y 不可行;如果运输方式x 与运输方式y 相同, 即x ≡y 时, ξ x y i k j i k j x y t ) 表示在节点i 处可能发生的货运延迟。
当节点是起始节点时, 笔者引入一个节点i ′, 从节点i ′以x 运输方式沿弧 (i ′, i ) 进入节点i , 假设不发生运输方式转换, 但有非负的运输时间τ x i ′ i i ′ i x t ) , 这个运输时间可能表示车辆从街道路口、停车场或者货运中心到达起始节点i 。对于每一个节点i , 笔者定义为:
Λ i = ⎡ ⎣ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ λ x 1 i k 1 ( t 0 ) λ x 1 i k 1 ( t 0 + Δ t ) ⋮ λ x 1 i k 1 ( t 0 + ( | T | − 1 ) Δ t ) λ x 1 i k 2 ( t 0 ) λ x 1 i k 2 ( t 0 + Δ t ) ⋮ λ x 1 i k 2 ( t 0 + ( | T | − 1 ) Δ t ) ⋯ ⋯ ⋯ λ x m i k 1 ( t 0 ) λ x m i k 1 ( t 0 + Δ t ) ⋮ λ x m i k 1 ( t 0 + ( | T | − 1 ) Δ t ) ⋯ ⋯ ⋯ λ x m i k n ( t 0 ) λ x m i k n ( t 0 + Δ t ) ⋮ λ x m i k n ( t 0 + ( | T | − 1 ) Δ t ) ⎤ ⎦ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ Λ i = [ λ i k 1 x 1 ( t 0 ) λ i k 2 x 1 ( t 0 ) ⋯ λ i k 1 x m ( t 0 ) ⋯ λ i k n x m ( t 0 ) λ i k 1 x 1 ( t 0 + Δ t ) λ i k 2 x 1 ( t 0 + Δ t ) ⋯ λ i k 1 x m ( t 0 + Δ t ) ⋯ λ i k n x m ( t 0 + Δ t ) ⋮ ⋮ ⋮ ⋮ λ i k 1 x 1 ( t 0 + ( | Τ | - 1 ) Δ t ) λ i k 2 x 1 ( t 0 + ( | Τ | - 1 ) Δ t ) ⋯ λ i k 1 x m ( t 0 + ( | Τ | - 1 ) Δ t ) ⋯ λ i k n x m ( t 0 + ( | Τ | - 1 ) Δ t ) ]
其中x m M 集的最后一种运输方式, k n Γ -1 (i ) , i ′}的最后一个节点
[7 ] 。
一般地, 符号λ x i k i k x t ) 表示在t 时刻以运输方式x 沿弧 (k , i ) 到达节点i 处的路径最短时间, 而符号λ x i i ′ i i ′ x t ) 表示在t 时刻以运输方式x 从入口节点i ′到达节点i 处的路径最短时间, 此处i 为起始节点。除入口节点外, D ′表示附加在目的节点D 处的出口节点。
假设在t 时刻, 在某初始节点i 处以运输方式x 开始运输, 到达目的节点D , 出口运输方式为x f π x i i ′ i i ′ x t ) ={ (n 1 =i , x 1 =x , t 0 1 1 0 t ) , (n 1 , x 2 , t 1 1 1 1 n 2 , x 2 , t 0 2 ) , …, (n k D , x k x f t 1 k k 1 D ′, x f t 1 k + 1 k + 1 1
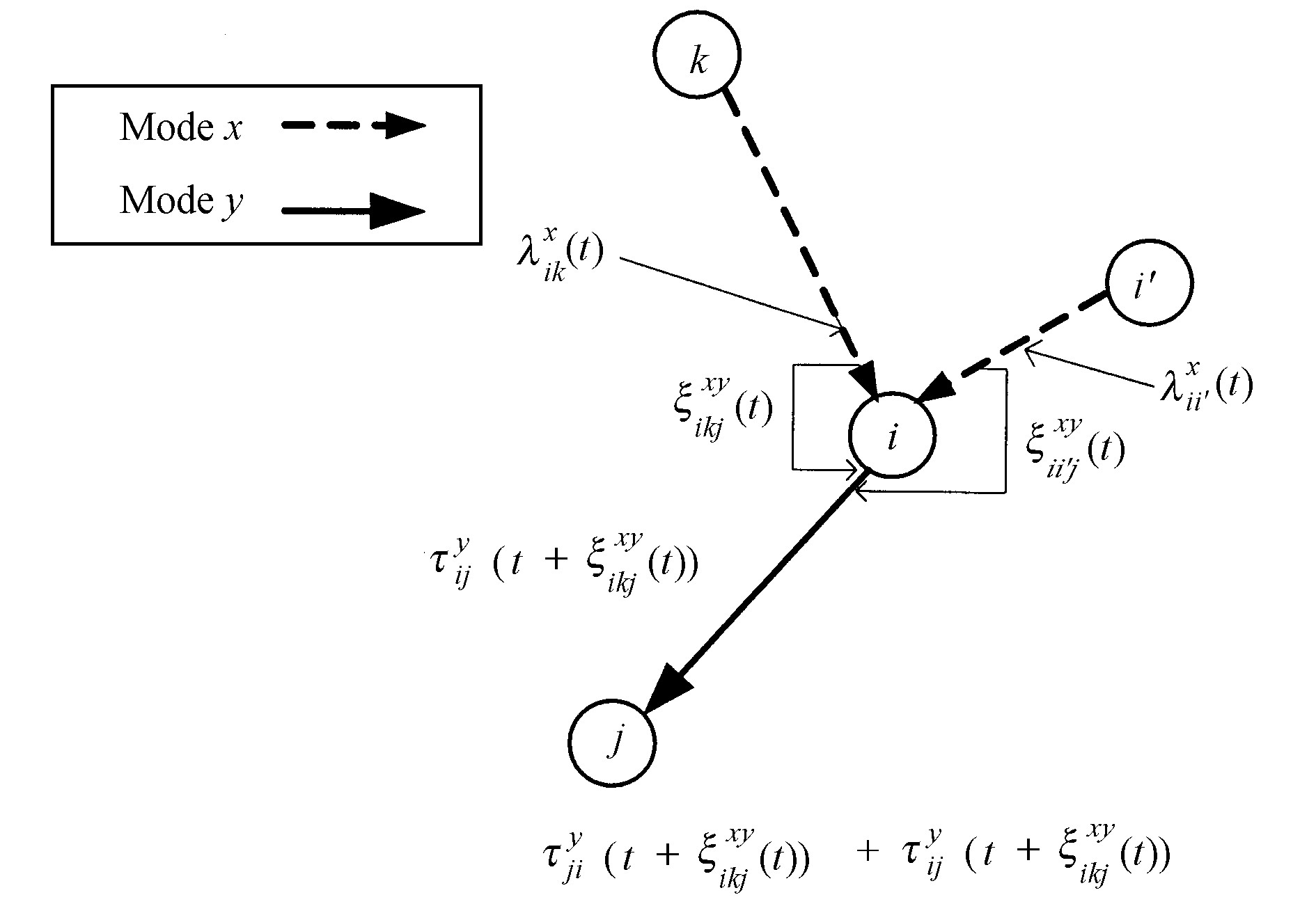
以上述公式为基础, 构造多式联运运输网络时间分析图 (见图2) , 多式联运路径最短时间模型为
[8 ] :
λ x i k ( t ) = min { ξ x y i k j ( t ) + τ y i j ( t + ξ x y i k j ( t ) ) + λ y j i ( t + ξ x y i k j ( t ) + τ y i j ( t + ξ x y i k j ( t ) ) ) } , λ i k x ( t ) = min { ξ i k j x y ( t ) + τ i j y ( t + ξ i k j x y ( t ) ) + λ j i y ( t + ξ i k j x y ( t ) + τ i j y ( t + ξ i k j x y ( t ) ) ) } ,
∀i ∈V \D , ∀j ∈Γ (i ) , k ∈{Γ -1 (i ) , i ′}∀x , y ∈M ∀t ∈T , V \D 为除D 之外的所有节点。
λ x D k D k x t ) =ξ x y D k D ′ D k D ′ x y t ) ∀t ∈T , ∀x ∈M , ∀k ∈{Γ -1 (D ) , D ′}为终点条件。节点i 的后续节点集合为Γ (i ) , 前续节点集合为Γ -1 (i ) , D 为目的节点, x f
通过迭代算法可以求解路径最短时间。根据最短时间路径, 求解该路径的运输费用。运输费用主要包括3部分:节点之间的运输费用;在节点处发生运输方式转换时的费用;在节点处发生货运延迟时的货物看管费用。
Z = ( ∑ i , j ∈ V ? ∑ x ∈ M c x i , j d x i , j + ∑ i , j ∈ V ? ∑ x , y ∈ M ω x y i , j s x y i + ∑ i ∈ V μ i ε i χ i ) Ζ = ( ∑ i , j ∈ V ? ∑ x ∈ Μ c i , j x d i , j x + ∑ i , j ∈ V ? ∑ x , y ∈ Μ ω i , j x y s i x y + ∑ i ∈ V μ i ε i χ i )
《图2》
图2 多式联运运输网络时间分析图
Fig.2 Time analytic figure of multimodal transportation networks
式中∑ i , j ∈ V ∑ i , j ∈ V ∑ x ∈ M c x i , j d x i , j ∑ x ∈ Μ c i , j x d i , j x
∑ i , j ∈ V ∑ x , y ∈ M ω x y i , j s x y i ∑ i , j ∈ V ∑ x , y ∈ Μ ω i , j x y s i x y
ω x y i , j = ⎧ ⎩ ⎨ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ 1 从 节 点 i 到 节 点 j , 由 第 x 种 运 输 方 式 转 换 到 第 y 种 运 输 方 式 0 从 节 点 i 到 节 点 j , 运 输 方 式 不 发 生 转 换 ∑ i ∈ V μ i ε i χ i 为 货 物 看 管 费 用 ‚ 其 中 ω i , j x y = { 1 从 节 点 i 到 节 点 j , 由 第 x 种 运 输 方 式 转 换 到 第 y 种 运 输 方 式 0 从 节 点 i 到 节 点 j , 运 输 方 式 不 发 生 转 换 ∑ i ∈ V μ i ε i χ i 为 货 物 看 管 费 用 ‚ 其 中
μ i = ⎧ ⎩ ⎨ ⎪ ⎪ 1 在 节 点 i 处 ‚ 除 运 输 方 式 转 换 时 间 外 ‚ 发 生 货 运 延 迟 0 不 发 生 货 运 延 迟 μ i = { 1 在 节 点 i 处 ‚ 除 运 输 方 式 转 换 时 间 外 ‚ 发 生 货 运 延 迟 0 不 发 生 货 运 延 迟
《4 结语》
4 结语
多式联运下的路径最短时间模型是基于通用的多式联运运输网络, 计算从任意起始点到任意目的结点的路径最短时间模型, 基于最短时间路径求解相应路径的运输费用。笔者提出的模型仅仅以时间为研究对象, 在实际作业中存在一定的局限性, 今后当以时间、费用、路径等多目标进行研究, 最终为多式联运相关决策提供依据。













 京公网安备 11010502051620号
京公网安备 11010502051620号




