《1 问题的提出》
1 问题的提出
广义T-S模糊系统是由传统T-S模型
[1 ] 与广义系统
[2 ] 理论相结合而发展起来的, 它能够很好地逼近非线性广义系统, 是解决非线性广义系统控制问题的一个新途径。广义模糊系统的研究目前还是一个比较新的研究领域
[3 ,4 ,5 ] , 有待系统地深入研究。将着重讨论具有极点配置约束的广义模糊系统的输出反馈控制问题, 以期设计的控制器将保证闭环系统具有所要求的动态性能和鲁棒稳态性能。
R i ∶ I f ξ 1 ( t ) i s M 1 i a n d , ⋯ , a n d ξ n ( t ) i s M n i , T h e n E x ˙ ( t ) = A i x ( t ) + B 1 i w ( t ) + B 2 i u ( t ) , z ( t ) = C 1 i x ( t ) + D 1 i u ( t ) , y ( t ) = C 2 i x ( t ) ( 1 ) R i ∶ Ι f ξ 1 ( t ) i s Μ 1 i a n d , ⋯ , a n d ξ n ( t ) i s Μ n i , Τ h e n E x ˙ ( t ) = A i x ( t ) + B 1 i w ( t ) + B 2 i u ( t ) , z ( t ) = C 1 i x ( t ) + D 1 i u ( t ) , y ( t ) = C 2 i x ( t ) ( 1 )
其中, x (t ) ∈R n u (t ) ∈R m z (t ) ∈R r y (t ) ∈R p A i R n ×n B i R n ×l C 1i ∈R r ×n C 2i ∈R p ×n D 1i ∈R r ×q E 可以是奇异矩阵。ξ 1 (t ) …ξ n t ) 为前提变量, M nj i = 1, 2, …, r 。
E x ˙ ( t ) = A x ( t ) + B 1 w ( t ) + B 2 u ( t ) , z ( t ) = C 1 x ( t ) + D 1 u ( t ) , y ( t ) = C 2 x ( t ) ( 2 ) E x ˙ ( t ) = A x ( t ) + B 1 w ( t ) + B 2 u ( t ) , z ( t ) = C 1 x ( t ) + D 1 u ( t ) , y ( t ) = C 2 x ( t ) ( 2 )
A = ∑ i = 1 r h i ( ξ ) A i , B 1 = ∑ i = 1 r h i ( ξ ) B 1 i , B 2 = ∑ i = 1 r h i ( ξ ) B 2 i , C 1 = ∑ i = 1 r h i ( ξ ) C 1 i , C 2 = ∑ i = 1 r h i ( ξ ) C 2 i , D = ∑ i = 1 r h i ( ξ ) D 1 i 。 A = ∑ i = 1 r h i ( ξ ) A i , B 1 = ∑ i = 1 r h i ( ξ ) B 1 i , B 2 = ∑ i = 1 r h i ( ξ ) B 2 i , C 1 = ∑ i = 1 r h i ( ξ ) C 1 i , C 2 = ∑ i = 1 r h i ( ξ ) C 2 i , D = ∑ i = 1 r h i ( ξ ) D 1 i 。
定义1
[3 ] 对给定正实数γ , 如果系统式 (2) 满足
∫ t 0 0 z T ( t ) z ( t ) d t ≤ γ 2 ∫ t 0 0 w T ( t ) w ( t ) d t ( 3 ) ∫ 0 t 0 z Τ ( t ) z ( t ) d t ≤ γ 2 ∫ 0 t 0 w Τ ( t ) w ( t ) d t ( 3 )
则称系统式 (2) 具有小于等于γ 的L 2 [0, t 0 ]增益, 即H ∞ 性能指标。
对系统式 (1) 或式 (2) 设计如下模糊动态输出反馈控制器:
R i ∶ I f ξ 1 ( t ) i s M 1 i a n d , ⋯ , a n d ξ n ( t ) i s M n i , R i ∶ Ι f ξ 1 ( t ) i s Μ 1 i a n d , ⋯ , a n d ξ n ( t ) i s Μ n i ,
{ E x ˙ ¯ ¯ ( t ) = A ¯ ¯ ¯ i x ¯ ¯ ( t ) + B ¯ ¯ ¯ i y ( t ) u ( t ) = C ¯ ¯ ¯ i x ¯ ¯ ( t ) ( 4 ) { E x ˙ ¯ ( t ) = A ¯ i x ¯ ( t ) + B ¯ i y ( t ) u ( t ) = C ¯ i x ¯ ( t ) ( 4 )
由系统式 (2) 和控制器式 (5) 组成的增广系统为
2) 对于给定的γ >0, 在零初值条件下, 闭环系统对所有的w (t ) ∈L 2 [0, ∞], 满足
3) 其有限特征值全部都在一个复平面上半径r 为中心、在 (-q , 0) 的圆盘D (r , q ) 中。
《2 主要结论》
2 主要结论
定理1
[3 ] 对于式 (1) 所示广义模糊系统设计模糊动态输出反馈控制器式 (4) , 若存在公共矩阵P ˜ Ρ ˜
则在动态反馈控制器式 (4) 的情况下系统正则、无脉冲且满足H ∞ 控制性能。
定理2
[5 ] 对于一个如式 (1) 所示的广义模糊T-S系统, 设计动态输出反馈如式 (4) , 若存在对称的公共矩阵X , Y , U , M , N , 使得下列线性矩阵不等式成立, 则系统正则、无脉冲且能满足H ∞ 的控制目标。
不等式 (8a) 成立, 则I -XU 非奇异, 于是利用满秩分解, 总可以得到满秩矩阵M 和N , 满足I -XU = MN T , 从而有Φ 2 非奇异, 即可以构造矩阵P =Φ 1 Φ − 1 2 2 - 1 P >0, 不等式 (8a) 的成立保证了解的正定对称性。把
[ E T X E T M T E T M E T Y ] = [ X E M E M T E Y E ] ≥ 0 , [ E Τ X E Τ Μ E Τ Μ Τ E Τ Y ] = [ X E Μ Τ E Μ E Y E ] ≥ 0 ,
⎡ ⎣ ⎢ ⎢ ⎢ ⎢ ⎢ A T i X + X A i + C I 2 B ¯ ¯ ¯ T i M T + M T B ¯ ¯ ¯ J C 2 I M A i + A ¯ ¯ ¯ T I M T + C ¯ ¯ ¯ T i B T 2 I X + Y B ¯ ¯ ¯ J C 2 I B T 1 i C 1 i X + D i C ¯ ¯ ¯ j M T A T i M + M T A ¯ ¯ ¯ J + C 2 I B ¯ ¯ ¯ T i Y + X B 2 C ¯ ¯ ¯ J C ¯ ¯ ¯ T i B T 2 I M + M B 2 I C ¯ ¯ ¯ J + A ¯ ¯ ¯ J Y + Y A ¯ ¯ ¯ T i 0 C 1 i M + D i C ¯ ¯ ¯ j Y B 1 i 0 − γ 2 I 0 X C 1 i + M C ¯ ¯ ¯ T i D T i M T C 1 i + Y C ¯ ¯ ¯ T i D T i 0 − I ⎤ ⎦ ⎥ ⎥ ⎥ ⎥ ⎥ < 0 [ A i Τ X + X A i + C Ι 2 B ¯ i Τ Μ Τ + Μ Τ B ¯ J C 2 Ι A i Τ Μ + Μ Τ A ¯ J + C 2 Ι B ¯ i Τ Y + X B 2 C ¯ J B 1 i X C 1 i + Μ C ¯ i Τ D i Τ Μ A i + A ¯ Ι Τ Μ Τ + C ¯ i Τ B 2 Ι Τ X + Y B ¯ J C 2 Ι C ¯ i Τ B 2 Ι Τ Μ + Μ B 2 Ι C ¯ J + A ¯ J Y + Y A ¯ i Τ 0 Μ Τ C 1 i + Y C ¯ i Τ D i Τ B 1 i Τ 0 - γ 2 Ι 0 C 1 i X + D i C ¯ j Μ Τ C 1 i Μ + D i C ¯ j Y 0 - Ι ] < 0
对上式化简, 分别对上式左乘diag (Φ T 2 , Φ T 2 ) , 右乘diag (Φ 2 , Φ 2 ) , 并令
A C j = X A i U + M T A ¯ ¯ ¯ j N T + B C j C 2 i U + X B 2 i C C j , B C j = M T B ¯ ¯ ¯ j , C C j = C ¯ ¯ ¯ j N T , A C j = X A i U + Μ Τ A ¯ j Ν Τ + B C j C 2 i U + X B 2 i C C j , B C j = Μ Τ B ¯ j , C C j = C ¯ j Ν Τ ,
引理1
[7 ] 考虑广义模糊系统 (E , A ) , 其中A = ∑ i = 1 N h i A i A = ∑ i = 1 Ν h i A i P , 满足以下的不等式, 则广义模糊系统 (E , A ) 是正则、无脉冲且D 是稳定的。
E T P E ≥ 0 ( 1 0 a ) ⎡ ⎣ ⎢ 0 E T ( A − E q ) T E − r 2 P − 1 0 A − E q 0 − P − 1 ⎤ ⎦ ⎥ < 0 ( 1 0 b ) E Τ Ρ E ≥ 0 ( 1 0 a ) [ 0 E A - E q E Τ - r 2 Ρ - 1 0 ( A - E q ) Τ 0 - Ρ - 1 ] < 0 ( 1 0 b )
定理3 对于系统式 (6) , 当存在一个对称矩阵P ˜ Ρ ˜ D 是稳定的。
E ˜ T P ˜ E ˜ ≥ 0 ( 1 1 a ) ⎡ ⎣ ⎢ ⎢ 0 E ˜ T ( A ˜ i j − E ˜ q ) T E ˜ − r 2 P − 1 0 A ˜ i j − E ˜ q 0 − P − 1 ⎤ ⎦ ⎥ ⎥ < 0 ( 1 1 b ) E ˜ Τ Ρ ˜ E ˜ ≥ 0 ( 1 1 a ) [ 0 E ˜ A ˜ i j - E ˜ q E ˜ Τ - r 2 Ρ - 1 0 ( A ˜ i j - E ˜ q ) Τ 0 - Ρ - 1 ] < 0 ( 1 1 b )
定理4 对于系统式 (6) 当存在一个对称矩阵X , Y , U , M , N , 满足以下的线性矩阵不等式, 则广义模糊T-S系统在输出反馈控制器式 (4) 作用下是正则、无脉冲且D 是稳定的。
[ X I I U ] > 0 ( 1 2 a ) [ E T X E E T M T E E T M E E T Y E ] ≥ 0 ( 1 2 b ) [ X Ι Ι U ] > 0 ( 1 2 a ) [ E Τ X E E Τ Μ E E Τ Μ Τ E E Τ Y E ] ≥ 0 ( 1 2 b )
⎡ ⎣ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ 0 0 X E T E T X ( A T − E T q ) + C T c j B T 2 A T − E T q 0 0 E T E T U A T c j − E T q ( A T − E T q ) U + C 2 B ¯ ¯ ¯ T c j E X E − r 2 X − r 2 0 0 E E U − r 2 − r 2 U 0 0 ( A − E q ) X + B 2 i C c j A c j − E q 0 0 − X − I A − E q U ( A − E q ) + B c j C 2 0 0 − I − Y ⎤ ⎦ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ < 0 [ 0 0 E X E ( A - E q ) X + B 2 i C c j A - E q 0 0 E E U A c j - E q U ( A - E q ) + B c j C 2 X E Τ E Τ - r 2 X - r 2 0 0 E Τ E Τ U - r 2 - r 2 U 0 0 X ( A Τ - E Τ q ) + C c j Τ B 2 Τ A c j Τ - E q Τ 0 0 - X - Ι A Τ - E Τ q ( A Τ - E Τ q ) U + C 2 B ¯ c j Τ 0 0 - Ι - Y ] < 0
证明 用类似定理2中的方法, 可以把式 (11a) 进一步化简为式 (12a) 和式 (12b) 。在不等式 (11b) 两边左、右各乘一个对角矩阵P =diag {I , P ˜ Ρ ˜ P ˜ Ρ ˜
⎡ ⎣ ⎢ ⎢ 0 E ˜ T ( A ˜ − E ˜ q ) T E ˜ − r 2 P − 1 0 A ˜ − E ˜ q 0 − P − 1 ⎤ ⎦ ⎥ ⎥ < 0 。 [ 0 E ˜ A ˜ - E ˜ q E ˜ Τ - r 2 Ρ - 1 0 ( A ˜ - E ˜ q ) Τ 0 - Ρ - 1 ] < 0 。
对上式分别左乘diag {I , Φ T 2 , Φ T 2 }, 右乘diag {I , Φ 2 , Φ 2 }, 则有
⎡ ⎣ ⎢ ⎢ 0 Φ T 2 P E ˜ T Φ 2 Φ T 2 P ( A ˜ − E ˜ q ) T Φ 2 Φ T 2 E ˜ P Φ 2 − r 2 Φ T 2 P Φ 2 0 Φ T 2 A ˜ P Φ 2 − Φ T 2 E ˜ q P Φ 2 0 − Φ T 2 P Φ 2 ⎤ ⎦ ⎥ ⎥ < 0 。 [ 0 Φ 2 Τ E ˜ Ρ Φ 2 Φ 2 Τ A ˜ Ρ Φ 2 - Φ 2 Τ E ˜ q Ρ Φ 2 Φ 2 Τ Ρ E ˜ Τ Φ 2 - r 2 Φ 2 Τ Ρ Φ 2 0 Φ 2 Τ Ρ ( A ˜ - E ˜ q ) Τ Φ 2 0 - Φ 2 Τ Ρ Φ 2 ] < 0 。
Φ 1 = [ X M T I 0 ] , Φ 2 = [ I 0 U N ] , P Φ 2 = Φ 1 , Φ T 2 P Φ 2 = Φ T 2 Φ 1 = [ X I I U ] , Φ 1 = [ X Ι Μ Τ 0 ] , Φ 2 = [ Ι U 0 Ν ] , Ρ Φ 2 = Φ 1 , Φ 2 Τ Ρ Φ 2 = Φ 2 Τ Φ 1 = [ X Ι Ι U ] ,
⎡ ⎣ ⎢ ⎢ 0 Φ T 1 E ˜ T Φ 2 Φ T 1 ( A ˜ − E ˜ q ) T Φ 2 Φ T 2 E ˜ Φ 1 − r 2 Φ T 2 P Φ 2 0 Φ T 2 A ˜ Φ 1 − Φ T 2 E ˜ q Φ 1 0 − Φ T 2 P Φ 2 ⎤ ⎦ ⎥ ⎥ < 0 [ 0 Φ 2 Τ E ˜ Φ 1 Φ 2 Τ A ˜ Φ 1 - Φ 2 Τ E ˜ q Φ 1 Φ 1 Τ E ˜ Τ Φ 2 - r 2 Φ 2 Τ Ρ Φ 2 0 Φ 1 Τ ( A ˜ - E ˜ q ) Τ Φ 2 0 - Φ 2 Τ Ρ Φ 2 ] < 0
A C j = X A i U + M T A ¯ ¯ ¯ j N T + B C j C 2 i U + X B 2 i C C j , B C j = M T B ¯ ¯ ¯ j , C C j = C ¯ ¯ ¯ j N T , A C j = X A i U + Μ Τ A ¯ j Ν Τ + B C j C 2 i U + X B 2 i C C j , B C j = Μ Τ B ¯ j , C C j = C ¯ j Ν Τ ,
基于上述分析, 可得满足性能要求的动态输出反馈控制器的设计方法, 即定理5。
定理5 给定量H ∞ 性能指标γ >0和圆形区域D (r , q ) , 若X , U , A ¯ ¯ ¯ A ¯ j B ¯ ¯ ¯ B ¯ j C ¯ ¯ ¯ C ¯ j H ∞ 性能, 而且还能将其极点配置在指定的圆形区域内。
注 由以上分析可知, 若X , U , A ¯ ¯ ¯ A ¯ j B ¯ ¯ ¯ B ¯ j C ¯ ¯ ¯ C ¯ j M 和N , 满足I -XU =MN T , 然后求解方程
A ¯ ¯ ¯ j = ( M T ) − 1 ( A C j − ( X A i U + B C j C 2 i U + X B 2 i C C j ) ) ( N T ) − 1 , B ¯ ¯ ¯ j = ( M T ) − 1 B C j , C ¯ ¯ ¯ j = ( N T ) − 1 C C j ( 1 2 ) A ¯ j = ( Μ Τ ) - 1 ( A C j - ( X A i U + B C j C 2 i U + X B 2 i C C j ) ) ( Ν Τ ) - 1 , B ¯ j = ( Μ Τ ) - 1 B C j , C ¯ j = ( Ν Τ ) - 1 C C j ( 1 2 )
《3 算例》
3 算例
T h e n E x ˙ = A i x + B 1 i w + B 2 i u z = C i x i = 1 , 2 Τ h e n E x ˙ = A i x + B 1 i w + B 2 i u z = C i x i = 1 , 2
其中 x (t ) = (x 1 (t ) , x 2 (t ) ) T , 其模糊规则为:
E x ˙ = A 1 x + B 1 1 w + B 2 1 u , z = C 1 x 。 E x ˙ = A 1 x + B 1 1 w + B 2 1 u , z = C 1 x 。
E x ˙ = A 2 x + B 1 2 w + B 2 2 u , z = C 2 x 。 E x ˙ = A 2 x + B 1 2 w + B 2 2 u , z = C 2 x 。
h 1 ( x 1 ( t ) ) = ( 1 + c o n x 1 ( t ) ) / 2 , h 2 ( x 1 ( t ) ) = ( 1 − c o n x 1 ( t ) ) / 2 , E = ⎡ ⎣ ⎢ 1 0 0 0 1 0 0 0 0 ⎤ ⎦ ⎥ , A 1 = ⎡ ⎣ ⎢ 1 0 0 2 2 5 0 7 6 ⎤ ⎦ ⎥ , A 2 = ⎡ ⎣ ⎢ 1 2 0 1 1 0 . 6 0 0 2 ⎤ ⎦ ⎥ , B 1 1 = ⎡ ⎣ ⎢ 0 . 0 0 1 0 0 . 0 9 ⎤ ⎦ ⎥ , B 1 2 = ⎡ ⎣ ⎢ 0 . 0 0 2 1 0 . 0 0 1 ⎤ ⎦ ⎥ , B 2 1 = ⎡ ⎣ ⎢ 1 1 0 ⎤ ⎦ ⎥ , B 2 2 = [ 1 2 0 ] T , [ C 1 = C 2 = [ 1 0 0 ] 。 h 1 ( x 1 ( t ) ) = ( 1 + c o n x 1 ( t ) ) / 2 , h 2 ( x 1 ( t ) ) = ( 1 - c o n x 1 ( t ) ) / 2 , E = [ 1 0 0 0 1 0 0 0 0 ] , A 1 = [ 1 2 0 0 2 7 0 5 6 ] , A 2 = [ 1 1 0 2 1 0 0 0 . 6 2 ] , B 1 1 = [ 0 . 0 0 1 0 0 . 0 9 ] , B 1 2 = [ 0 . 0 0 2 1 0 . 0 0 1 ] , B 2 1 = [ 1 1 0 ] , B 2 2 = [ 1 2 0 ] Τ , [ C 1 = C 2 = [ 1 0 0 ] 。
对于上述算例, 设定系统输入是一个从零时刻开始的、终止值为10的阶跃函数。系统扰动是一个幅值为0.1的正弦函数。可以得到开环系统的输出曲线 (见图1) , 可以看出, 系统开环是不稳定的。
《图14》
图1开环系统响应
Fig.1 Response to open-loop system
由定理5, 利用LMI可以计算得出使系统满足控制目标的动态输出反馈控制器为:,
A ¯ ¯ ¯ 1 = ⎡ ⎣ ⎢ − 6 . 4 5 4 7 − 5 . 3 4 2 6 − 0 . 0 1 4 6 9 . 1 6 1 0 7 . 5 8 3 2 0 . 0 3 7 8 3 . 6 6 6 5 3 . 0 3 4 9 − 0 . 0 5 2 3 ⎤ ⎦ ⎥ , A ¯ ¯ ¯ 2 = ⎡ ⎣ ⎢ − 6 . 6 6 7 8 − 5 . 5 2 3 6 − 0 . 0 1 3 2 3 . 1 4 1 6 2 7 . 6 3 4 2 0 . 0 3 6 8 1 . 2 7 9 6 3 . 1 2 4 5 − 0 . 0 5 1 7 ⎤ ⎦ ⎥ ‚ B ¯ ¯ ¯ 1 = ⎡ ⎣ ⎢ − 1 . 1 2 1 6 − 0 . 9 2 8 4 0 . 0 0 0 1 ⎤ ⎦ ⎥ ‚ B ¯ ¯ ¯ 2 = ⎡ ⎣ ⎢ − 1 . 0 4 4 1 − 0 . 8 6 4 3 0 . 0 0 0 0 ⎤ ⎦ ⎥ ‚ C ¯ ¯ ¯ 1 = [ 0 . 0 0 2 4 − 0 . 0 1 7 8 − 0 . 0 6 8 9 ] ‚ C ¯ ¯ ¯ 2 = [ 0 . 0 0 4 7 − 0 . 0 2 5 8 − 0 . 2 0 6 0 ] . A ¯ 1 = [ - 6 . 4 5 4 7 9 . 1 6 1 0 3 . 6 6 6 5 - 5 . 3 4 2 6 7 . 5 8 3 2 3 . 0 3 4 9 - 0 . 0 1 4 6 0 . 0 3 7 8 - 0 . 0 5 2 3 ] , A ¯ 2 = [ - 6 . 6 6 7 8 3 . 1 4 1 6 1 . 2 7 9 6 - 5 . 5 2 3 6 2 7 . 6 3 4 2 3 . 1 2 4 5 - 0 . 0 1 3 2 0 . 0 3 6 8 - 0 . 0 5 1 7 ] ‚ B ¯ 1 = [ - 1 . 1 2 1 6 - 0 . 9 2 8 4 0 . 0 0 0 1 ] ‚ B ¯ 2 = [ - 1 . 0 4 4 1 - 0 . 8 6 4 3 0 . 0 0 0 0 ] ‚ C ¯ 1 = [ 0 . 0 0 2 4 - 0 . 0 1 7 8 - 0 . 0 6 8 9 ] ‚ C ¯ 2 = [ 0 . 0 0 4 7 - 0 . 0 2 5 8 - 0 . 2 0 6 0 ] .
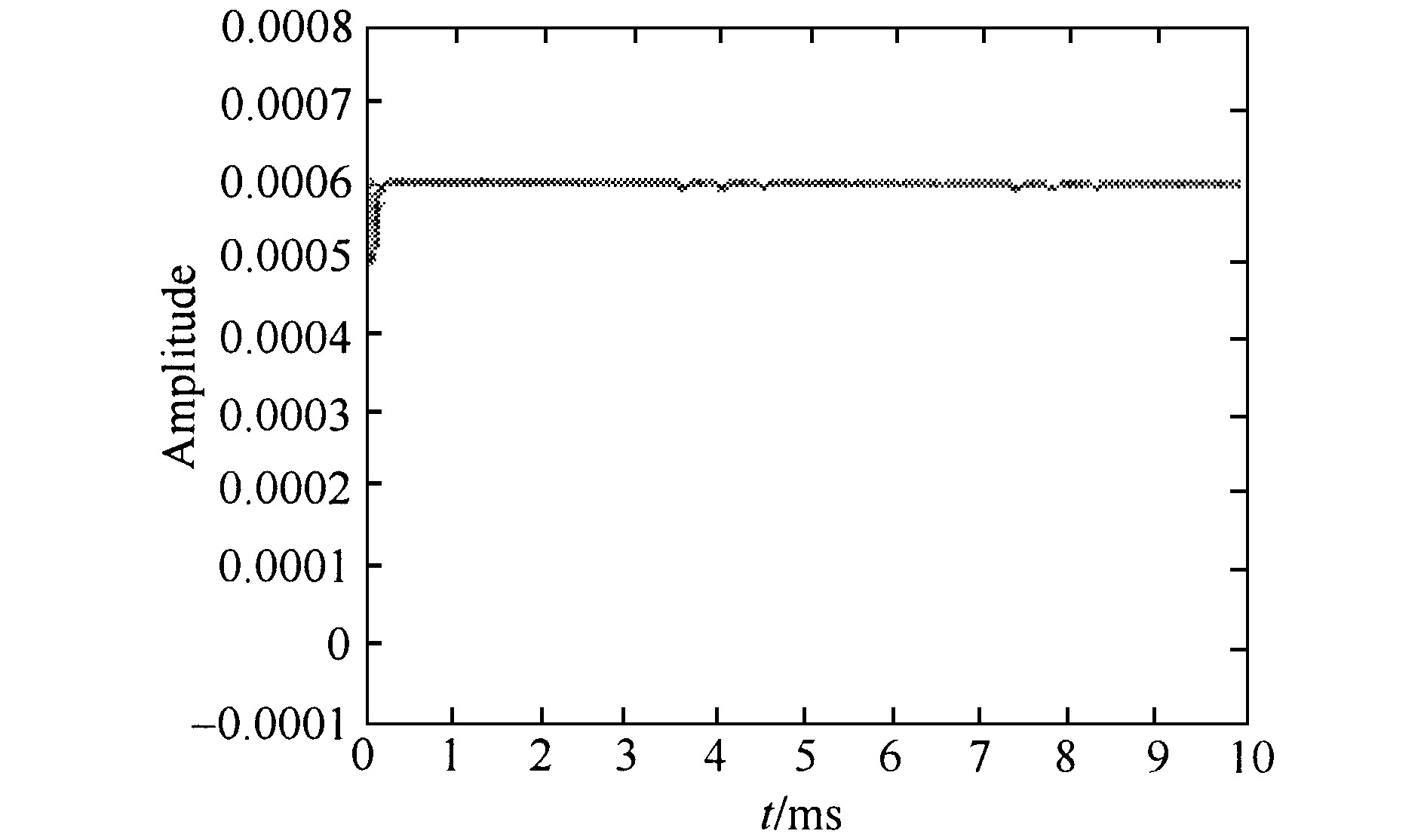
取系统的性能指标γ = 0.1, 即在系统稳定后, 系统相对应于其外部扰动的增益小于γ = 0.1, 闭环系统的极点配置在以-8为圆心、以1为半径的圆内, 闭环系统仿真结果如图2所示, 可见系统的响应速度达到了一个较快的水平。
《图15》
图2闭环系统响应
Fig.2 Response to closed-loop system
《4 结语》
4 结语
利用LMI方法给出了使闭环广义T-S模糊系统既具有H ∞ 性能、又具有将其极点配置在圆形区域内的动态反馈控制器存在的充分条件, 并阐述了由一组LMI的可行解得到动态输出反馈控制器的设计方法。






















 京公网安备 11010502051620号
京公网安备 11010502051620号




