




《1 前言》
1 前言
四轮转向 (four-wheel steering, 4WS) 是提高车辆操纵稳定性和主动安全性的有效控制策略, 已成为目前的研究热点之一。4WS控制系统的研究大多以经典控制理论为基础
常规的H∞控制由于实质是将各类不确定性总体叠加, 导致对鲁棒性而言常常过分保守。而μ综合鲁棒控制方法是鲁棒控制分析与综合的一种有效手段。该方法对不同不确定性分别建模, 可同时兼顾系统的稳定鲁棒性和性能鲁棒性, 通过定义结构奇异值作为度量, 采用矩阵不等式方法 (LMI) 确定其上下界, 引入定标矩阵实现上界的迭代逼近
本文根据4WS车辆控制器设计对稳定鲁棒性和性能鲁棒性的严格要求, 提出横摆角速度跟踪控制算法框架, 根据系统性能的要求选取不同环节的权函数, 采用μ综合方法实现4WS车辆控制器设计。仿真结果表明, 4WS控制系统对模型参数的摄动具有良好的动态性能、稳定鲁棒性和性能鲁棒性, 有效地提高了车辆操纵稳定性和安全性。
《2 车辆四轮转向系统动力学模型》
2 车辆四轮转向系统动力学模型
研究四轮转向汽车操纵稳定性可以采用两自由度转向模型, 其简化数学表达式为
式中δf和δr为前、后轮转角;Fy1和Fy2为前、后轮所受的侧向力, 线性轮胎模型是假定汽车转向时前、后轮所受侧向力大小与前后轮侧偏角成线性关系;m为汽车质量;Iz为横摆惯性力矩; β为质心点的侧偏角;γ为横摆角速度;v为行驶速度;Lf, Lr为质心至前、后轴的距离;Kf, Kr为前、后轮的侧偏刚度。
根据汽车转向响应的横摆角速度γ和车辆质心的侧偏角β, 可得到侧向加速度
式中y为侧向位移。
由式 (1) 和式 (2) 可得到如下状态方程形式的线性汽车模型:
考虑到方向盘转角与前轮转角一般都是比例关系, 仿真计算以前轮转角为输入。由于横摆角速度便于测量, 而质心侧偏角难以测量, 控制系统只取横摆角速度作为反馈变量来设计方向盘转角跟踪横摆角速度的μ综合鲁棒控制, 如图1所示4WS车辆闭环控制系统。前、后轮转向角到车辆质心横摆角速度的传递函数为
其中
理想横摆角速度增益定义为
《3 μ综合鲁棒控制器设计》
3 μ综合鲁棒控制器设计
《3.1μ综合鲁棒性能定理[2]》
3.1μ综合鲁棒性能定理[2]
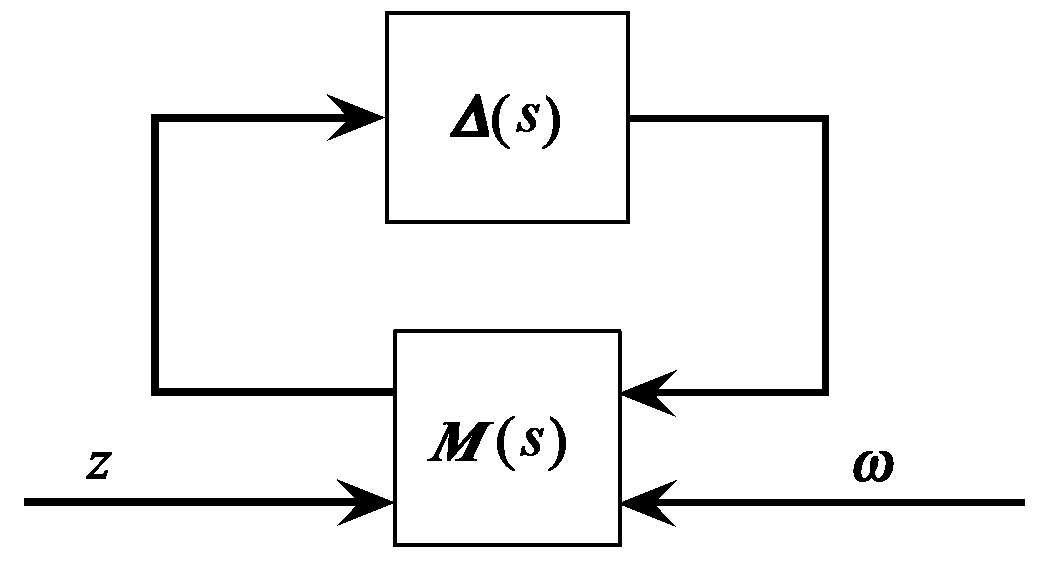
用结构奇异值μ定量地表征结构化不确定性对线性动态系统稳定性及性能的影响。如图2所示, 对于传递函数矩阵M表示的广义标称系统, M∈Cn×n, 块对角阵集合Δ (s) 表示结构化不确定性摄动, w表示外部输入, z表示外部误差输出, μ可定义为
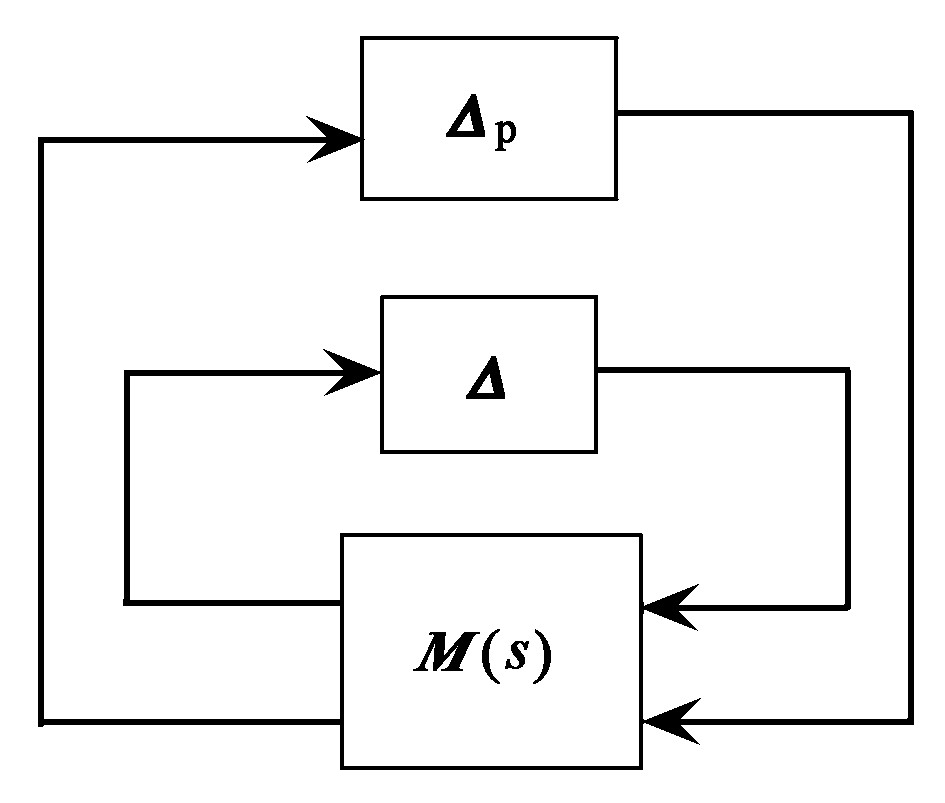
Dolye等通过引入一个假想不确定性Δp, Δ是实际摄动, 定义:
M (s) 有q1+q2个输入和p1+p2个输出, M (s) 是P (s) 和K (s) 的线性分式变换 (LFT) ,
为无模型摄动情况下的系统闭环阵。
如图3所示闭环系统对所有摄动Δ稳定的充要条件为μΔ (M) <1, ∀ω, ω表示频率域。
如图2, 图3所示的鲁棒性能分析的M-Δ结构框图, 鲁棒性能定理可描述为
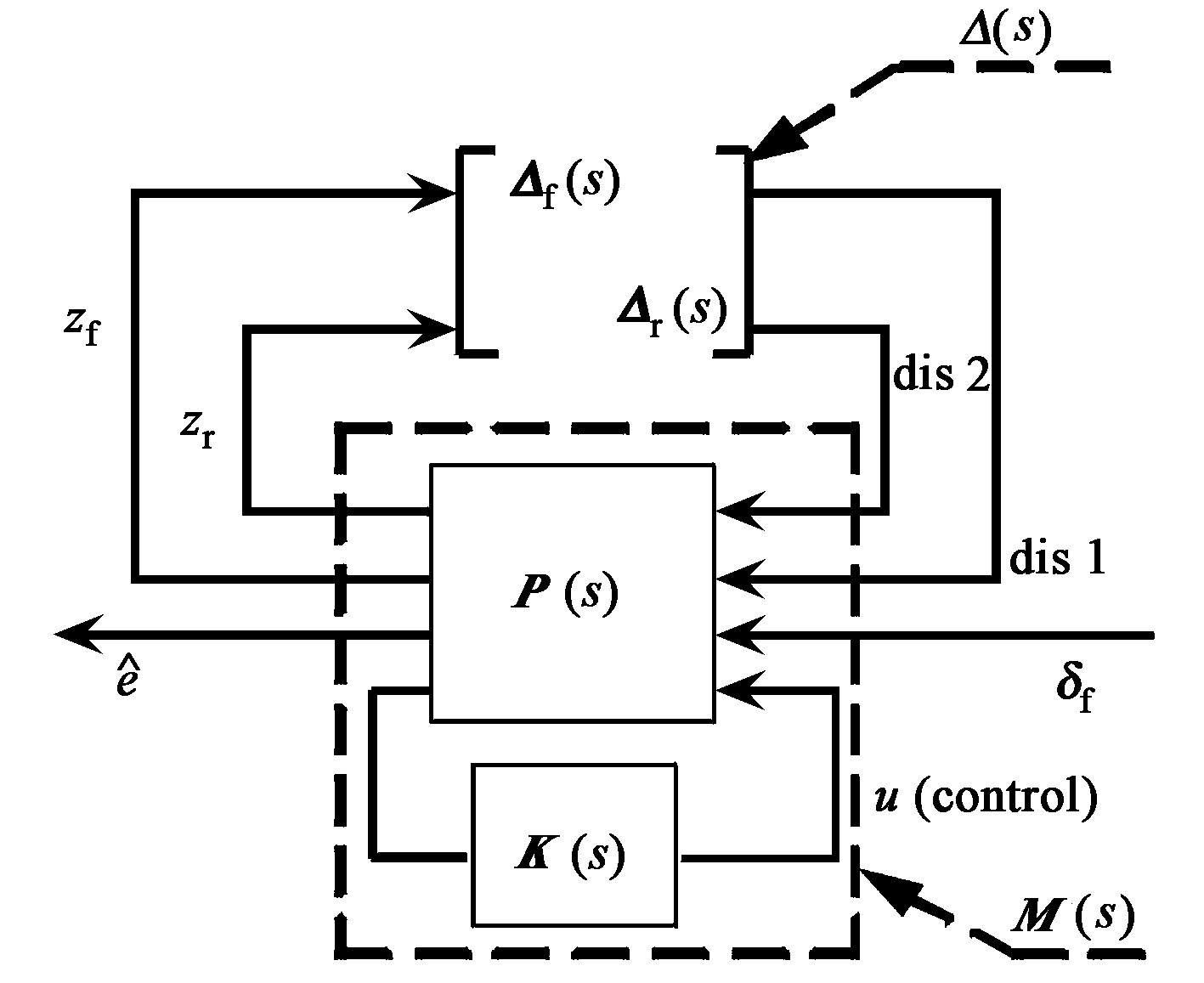
基于鲁棒性能的4WS车辆广义控制逻辑框图如图4所示。
《3.2μ综合鲁棒控制器设计》
3.2μ综合鲁棒控制器设计
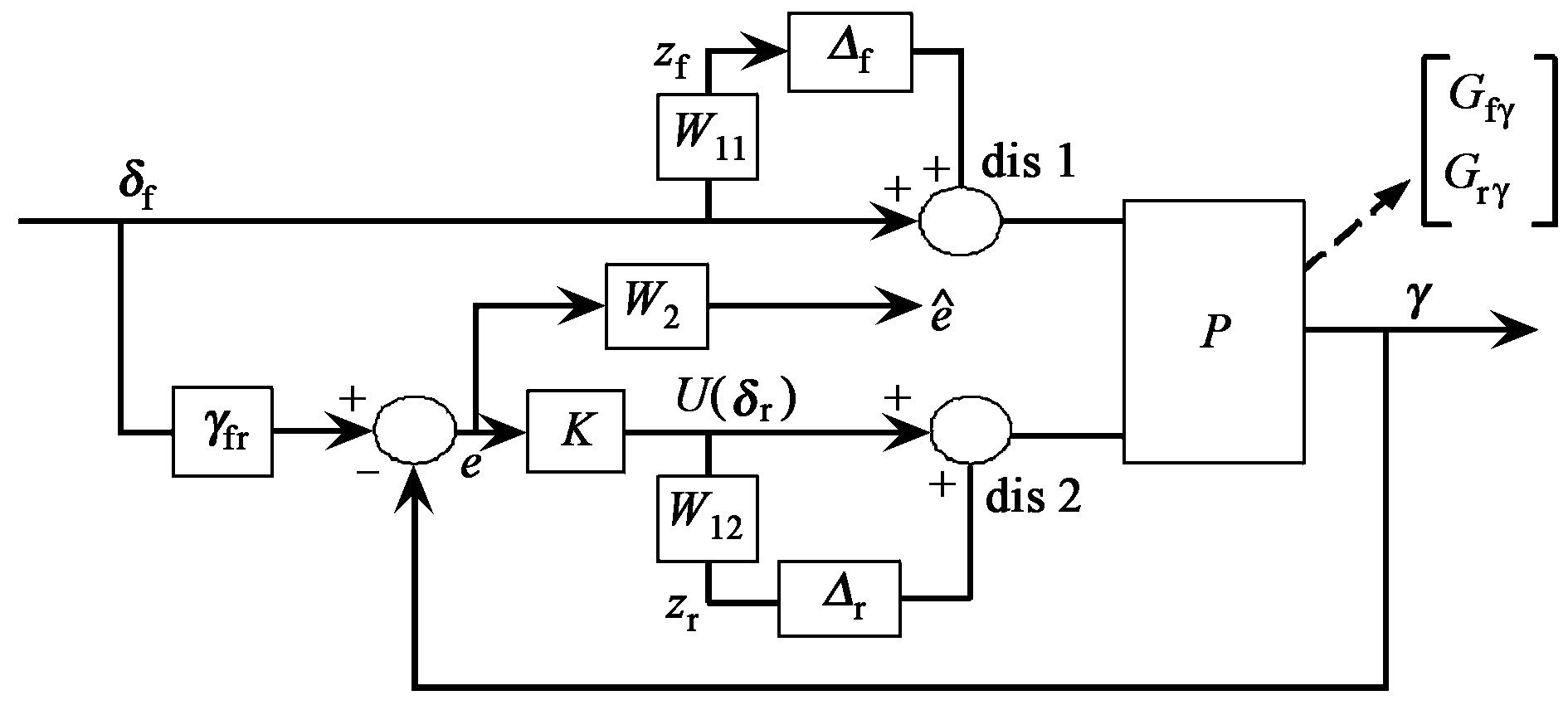
P (s) 为广义4WS车辆系统, K (s) 为μ综合反馈控制传递矩阵, γ为传感器输出的横摆角速度, u为控制输出的控制量;dis1, dis2和 zf, zr为前后轮车辆系统不确定性模块的输入及输出;以及实际系统中不确定性的环节Δf和W11, Δr 和W12, 建模中所有不确定性都归入归一化Δf, Δr, 它描述了标称模型P (s) 和实际系统模型M (s) 之间的差别。另外Δf, Δr是稳定的且仅知道有范数边界条件‖Δf‖∞<1, ‖Δr‖∞<1及其结构。W11, W12为模型不确定性频率加权函数, W2为系统性能加权函数反映在指定频率范围内系统所要求达到的性能权重。δf为前轮转角输入,
μ综合算法是在所有稳定的控制器K中最小化闭环系统的F1 (P (s) , K (s) ) 的
对稳定的车辆系统摄动Δf, Δr, 且‖Δf‖∞<1, ‖Δr‖∞<1, 找寻一个稳定的控制器K (s) , 使得闭环车辆系统在摄动情况下仍能保持稳定, 方向盘转角跟踪横摆角速度的瞬态响应, 加权灵敏度传递函数矩阵
有‖S (Δ) ‖∞<1成立。
4WS车辆系统μ控制器可描述为
μ控制器K (s) 的设计采用D-K迭代法, 在D-K迭代中, 设计μ综合鲁棒控制器转化为寻求稳定的控制阵K (s) 和尺度矩阵D (s) , 首先保持D (s) 不变, 则上式实际上是H∞优化控制问题, 通过求解Riccati方程得到;保持K (s) 不变, 即在已知一稳定的控制器K (s) 前提下, 对D (s) 进行凸优化。
《4 四轮转向车辆控制系统仿真》
4 四轮转向车辆控制系统仿真
定义:Gf0=Gfγ (v0) , Gr0=Grγ (v0) , 车辆系统仿真参数如表1所示。
Table 1 4WS vehicle data
《表1》
m /kg | Lf /m | Lr /m | Kf/ N·rad-1 | Kr/ N·rad-1 | v/ m·s-1 | Iz/ kg·m2 |
1 740 | 1.12 | 1.52 | 37 500 | 75 000 | 35 | 2 045 |
基于多变量不确定性的四轮转向车辆系统模型, 定义
对于车辆摄动Δf, Δr, 考虑‖Δf‖∞<1, ‖Δr‖∞<1, 把式 (8) 改写为
式 (9) 也可表达成另外一种形式:
根据式 (10) 及4WS车辆系统要求横摆角速度跟踪与尽量控制质心侧偏角为零的控制目标, W1, W2经过不断的试算, 现取模型不确定性加权函数W1=diag[W11, W12], Gfγ, Grγ对应的加权函数
系统的跟踪误差
模型不确定性加权函数W11, W12为乘法摄动, 如图5所示在simulink中建模, 方向盘转角输入为单位角阶跃输入, 现假设前轮转角为4°。考虑实际车辆系统乘法摄动外扰以白噪声为理论近似, 假设白噪声功率谱密度图 (PSD) 的高度为0.02 rad/s, 采样时间为0.01 s。
基于以上加权函数, 通过三次D-K迭代得到20阶控制器, 由于阶次过高, 应用MAILAB/simulink控制工具箱
Table 2 Summary of D-K Iteration
《表2》
迭代 | 控制器阶数 | 尺度矩阵D阶数 | γ值 | μ峰值 |
1 | 8 | 0 | 12.688 | 0.525 |
2 | 20 | 12 | 0.491 | 0.475 |
3 | 20 | 12 | 0.457 | 0.456 |
图6为横摆角速度操纵稳定性响应, 可以看出, 给方向盘一个角阶跃输入, 前轮转角为4°的工况下, 4WS横摆角速度峰值为0.06 rad/s;在时间1s时基本稳定;控制器设计的目标即为横摆角速度跟踪控制。在白噪声的外扰下, 横摆角速度基本上跟踪方向盘的转角, 稳定时间也比较快, 说明γ的Kμ控制器对系统的鲁棒性能有改善。图7为质心侧偏角响应曲线, 如图4所示, 系统反馈量为γ, 设计的是理想横摆角速度增益, 但4WS车辆质心侧偏角只是在较短时间内有小的波动, 最大峰值不到0.008 rad, 基本保持为零, 说明设计的4WS μ控制器Kμ对运动姿态也得到较好的控制。图8为侧向加速度响应曲线, 汽车侧向加速度在常速下的最大幅度一般不高于3~4 m/s2, 4WS由于后轮转向的加入, 使侧向加速度的过渡过程变得复杂;侧向加速度阶跃响应的最大幅值升高, 性能指标值的变化规律变得也较为复杂, 设计的控制器使得侧向加速度ay最大幅值为3.4 m/s2, 说明控制器很好地控制了侧向加速度性能, 响应曲线也充分证明侧向加速度反应时间迅速, 转向运动平稳, 在扰动工况下车辆仍能保持良好的动态性能。
仿真结果证明, 通过μ综合鲁棒控制设计, 不仅可以使4WS车辆系统具有良好的操纵稳定性和鲁棒性, 而且对外界干扰具有较好的抑制性能。
《5 结语》
5 结语
笔者应用μ综合鲁棒控制设计方法, 以模型不确定性的四轮转向车辆为对象, 基于横摆角速度跟踪理论对4WS车辆控制系统进行分析, 同时考虑了系统鲁棒稳定性、鲁棒性能及系统的动态性能。结果表明, 系统具有良好的跟踪性能, 对外扰有很强的抑制作用, 改善了以往控制器设计的保守性及车辆转向响应性能, 有效地提高了车辆操纵稳定性和安全性。











 京公网安备 11010502051620号
京公网安备 11010502051620号




