《1 问题的背景》
1 问题的背景
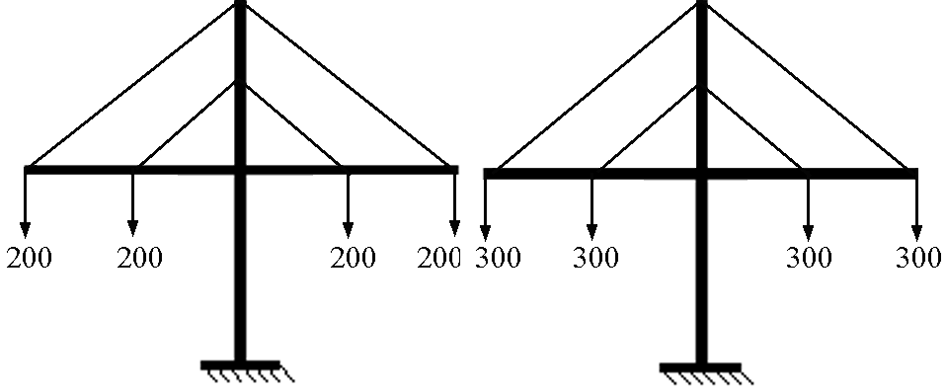
现代的大跨度桥梁,几乎均采用分阶段施工的建造方法,如拱桥的无拱架施工,连续梁(刚构)的悬臂施工,斜拉桥的施工过程更是要经历多次的体系转换才能达到最终的成桥恒载状态。区别于在落地支架上施工的一次成形结构,分阶段成形结构的最终恒载状态是分若干阶段形成的。分阶段施工结构的共同特点是,结构不是一次成形的,随着施工过程中结构的不断变化,结构上各部位恒载分阶段施加于不同的结构体系上(见图 1)。
《图1》
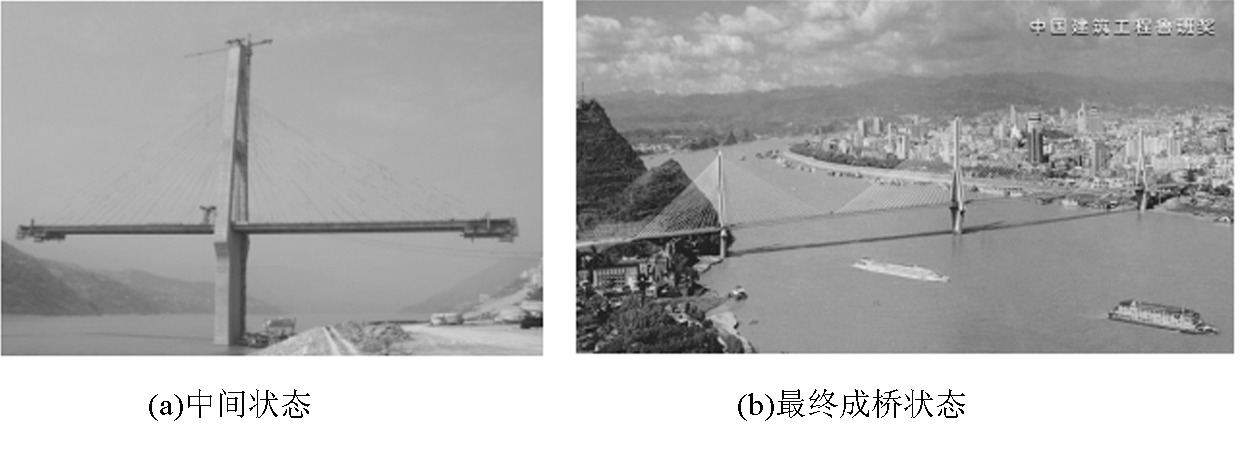
图1 桥梁施工中间状态与最终成桥状态
Fig.1 Mid stage and the last completed stage of bridge construction
如果桥梁在落地支架上一次成形,即先形成完整的结构,再在结构上施加荷载(恒载),桥梁成桥恒载作用下的平衡状态可由经典力学平衡方程(式(1))来描述。

图 2 为施工过程计算简图。图 2(f)的成桥恒载状态经历了(a)~(e)的中间施工过程,结构各部位的恒载分别施加于不同的结构体系上。显然, 成桥状态(f)的内力和位移不能直接以图 2(f)的计算图示和荷载,利用经典力学的平衡方程来求解。
《图2》

图2 施工过程计算简图
Fig.2 Calculation diagram of construction process
解决分阶段施工桥梁分析计算的传统方法是:假定中间过程((a)~(e))每一施工阶段是一次成形的,并借用一次成形结构的分析方法(式(1)),用该阶段荷载的增量和对应的计算图示计算该阶段内力和位移的增量并逐阶段累加,最后得到成桥恒载状态(f)的内力和位移,这就是分阶段施工桥梁的正装计算。桥梁成桥恒载状态(f)的内力和位移是由(a)~(e) 阶段内力和位移的增量的数值累加而得,最终成桥恒载状态(f)的平衡条件无法用式(1)来描述。
对于斜拉桥,成桥恒载状态的结构内力和线形一般是设计指定的,施工完成的斜拉桥的内力、线形必须满足设计要求。若斜拉桥采用分阶段施工,则施工前必须根据设计的成桥目标(见图 3(f))计算满足成桥状态要求的施工中间阶段((e)~(a))的结构内力和线形。传统的安装计算一般采用倒退分析法。
《图3》

图3 倒退分析简图
Fig.3 Diagram of backward analysis
图 3 为倒退分析计算简图,计算时是以成桥的目标状态(f)作为计算的起始点,按正常施工安装次序的逆序进行倒拆计算,通过内力和位移值的累加(累减)来确定斜拉桥施工各中间阶段((e)~(a))的内力和线形。 倒退分析是一个虚拟的过程,目的只是为了找到满足成桥目标要求的中间施工过程,实际施工中并不发生, 倒退分析完成后还必须按桥梁实际施工过程进行正装计算。
从前述的讨论可以看出,不论是正装计算还是倒退分析,都假定了分阶段施工桥梁任意中间过程是一次成形结构,用经典力学平衡方程(式(1))计算该阶段荷载增量产生的结构内力和位移的增量,施工阶段结构总内力和总位移是所有相关阶段内力和位移增量的累加。 传统方法存在如下不足:
1) 由于桥梁施工阶段内力和位移是由一系列增量的数值累加而来,施工阶段的总内力和总位移与相关的每个施工阶段的增量有关,环环相扣,一旦实际施工时工序需要调整,则全部安装计算都必须重新进行,应变能力差;
2) 倒退分析是一个工程施工中不存在的虚拟过程,增加了数据准备和计算的工作量;
3) 斜拉桥施工中,需要调整斜拉索索力,传统方法无法解决斜拉索索力调整与荷载变化的相互干扰问题。
《2 分阶段成形结构力学平衡方程》
2 分阶段成形结构力学平衡方程
分阶段成形结构的任意中间施工过程状态(或结构最终状态)如图 4 所示,用能量法来建立以结构总内力或总位移表述的力学平衡方程[1,2]。
《图4》
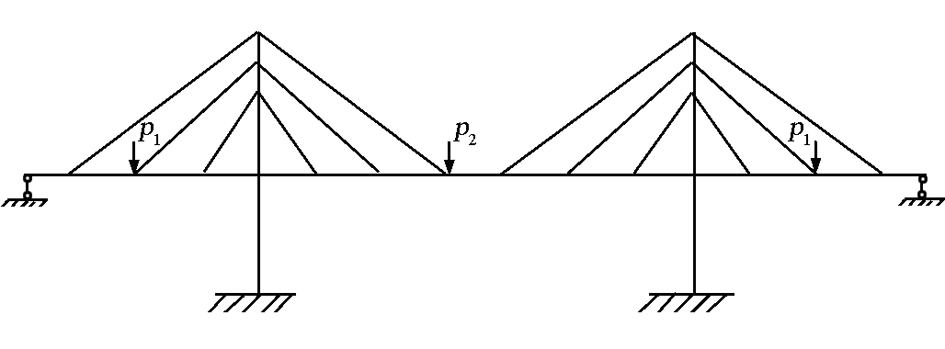
图4 分阶段施工的结构
Fig.4 Stage-constructed structure
不论结构形成过程如何,构件单元在什么阶段施工安装,最终状态(也可以是中间施工阶段)构件单元的变形势能只与单元的最终变形和零应力(无应力)时的长度和曲率有关[3]。
由于结构是分阶段成形的,后续单元安装时,已有结构上的节点可能有变形存在,构件单元的变形势能不能以节点位移的“零”为起算点,而必须以构件单元零应力时的长度和曲率为起算点。最终状态单元 i,j 的轴向变形,如图 5 所示。
《图5》
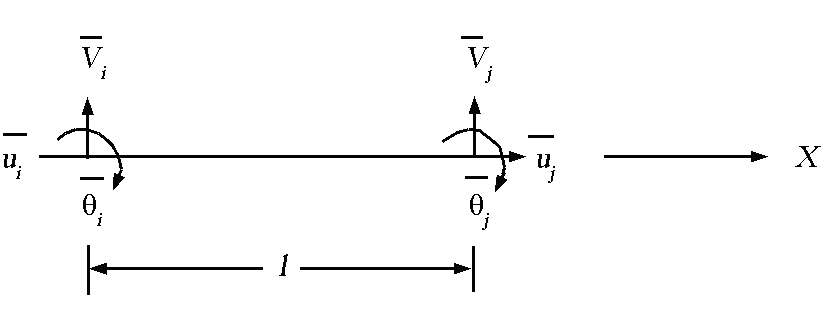
图5 局部坐标系下单元的变形
Fig.5 bElement deformation in local coordinate system

 为构件单元的无应力长度。
为构件单元的无应力长度。

i,j 单元上无单元荷载时,曲率 K 沿单元长度方向的变化一定是线性的[1]。设 i 端的曲率为 Ki ,i 端的曲率为 Kj ,则:

同样有:

由结构的平衡条件

可以推导出结构的平衡方程[1,3]:

式(4)中,[K],{P}具有与式(1)相同的形式。对于二维梁单元,定义单元无应力长度和无应力曲率两个无应力状态量,{L0 }为:

式(4)就是分阶段成形结构的力学平衡方程。对于任意类型单元,只要定义相应的无应力状态量都可以推导出类似的平衡方程[1]。不同的单元类型,式(5)具有不同的形式。
对比式(1) 和式(4) 可以看出,分阶段成形结构,由于结构分阶段成形,结构恒载施加于不同的结构体系上,后续安装的构件单元实际安装在已变形的结构上,形成一个广义的附加荷载{L0 }。如果结构一次成形,{L0 }等于零,式(4)自然退化成式(1)的形式。
《3 无应力状态控制法基本原理》
3 无应力状态控制法基本原理
由式(4)的平衡方程可以看出,分阶段成形结构任意阶段结构的内力和位移都可由下述 4 个条件唯一决定:a. 外荷载(结构恒载) 的作用位置和大小;b. 结构体系:组成结构的构件单元的几何尺寸,位置和刚度参数;c. 边界条件;d. 构件单元的无应力状态量。
对于分阶段成形结构任意的中间阶段或最终状态,当上述 4 个条件一定时,结构的内力和变形是确定的,唯一的,与结构构件单元的安装形成过程无关。这个结论对考虑几何非线性的结构也是适用的[1]。传统的分阶段成形结构分析中之所以会得出结构的内力和位移状态与结构的施工过程紧密相关的结论,是因为其分析过程没有考虑组成结构的构件单元的无应力状态量。换言之即分阶段成形结构最终状态的结构内力和位移与组成结构的构件单元在无应力时的几何长度和曲率有关。由此可得出无应力状态控制法的第一个原理。
1) 无应力状态控制法原理一。一定的外荷载、结构体系、支承边界条件、单元的无应力状态量组成的结构,其对应的结构内力和位移是唯一的,与结构的形成过程无关。
无应力状态控制法第一个原理描述的是分阶段成形结构施工过程与最终状态的关系。既然在单元无应力状态量确定的情况下,最终恒载状态与施工过程无关,那么就没有必要通过逐阶段分析去寻找中间施工过程,而只需控制好分阶段成形结构构件单元的无应力状态量。所以此方法称之为无应力状态控制法。
下面来研究过程状态的内力、位移与无应力状态量之间的关系。
《图6》
过程状态 1(P 1 ) 过程状态 2(P 2 )
图6 施工过程状态
Fig.6 Structural process state during construction
如图 6 所示是分阶段成形结构的两个中间状态,当结构体系无变化,仅荷载发生变化时,结构内力和位移的变化可由一次成形结构的方法来计算,其增量可由式(6)来表述:

依据分阶段成形结构的平衡方程,对于过程状态 1(P1 )有:

对于过程状态 2(P2)有:

式(7)-式(8):

式(9)-式(6):

由式(10)可以看出,结构单元的无应力量是结构本身的一个固有量,它不会随结构的荷载变化而变化。要改变构件单元的无应力长度和无应力曲率必须对构件单元的 “外形”有实质的“物理”改变,如拉索结构中,若要减少拉索单元的无应力长度必须通过张拉千斤顶人为地拔出拉索锚头,以减小拉索两锚固点之间的无应力长度。
令式(9)中 P1 =P2 :

式(11)描述了单元无应力状态量调整对结构内力和线形的影响,当荷载不变时,结构无应力状态量的变化会唯一对应一个结构内力和位移的变化。
实际工程中,单元的无应力状态量一般在安装前调整和控制,安装完成的构件要调整其无应力长度和无应力曲率比较困难。但拉索结构中索的无应力长度在整个施工过程都是可调的,考虑到拉索调索计算的习惯,可以推导出拉索结构单根拉索无应力索长变化与索力变化之间的关系[1,2,4]。
《图7》

结构状态 A:索的无应力长度 S10 ;索面积 A;拉索的弹性模量 E;索力 T1 ;通过用千斤顶主动张拉拉索成为状态 B:索的无应力长度 S 20 ;索力 T2 = T1 + ΔT12
图7 结构索力调整
Fig.7 Cable force adjustment of structure

式(12)说明了在外荷载和结构体系不变时,无应力索长调整与索力变化的对应关系。拉索 AB 的无应力长度从 S10 调整到 S20 对整个结构的效应与 AB 索张拉力增加 ΔT 12 等同。
综上所述,可得出无应力状态控制法的第二个原理[1,2,4]。
2) 无应力状态控制法原理二。结构单元的内力和位移随着结构的加载,体系转换和拉索的张拉而变化,单元无应力长度只有人为的调整才会发生变化。当荷载和结构体系一定时,单元的无应力长度的变化必然唯一地对应一个单元轴力的变化。
利用无应力状态控制法的两个基本原理,可以非常有效地解决分阶段成形结构分析计算和施工过程控制中的若干问题[5~11]。笔者主要介绍在斜拉桥中的 3 个典型应用。
《4 无应力状态控制法的工程应用》
4 无应力状态控制法的工程应用
《4.1 斜拉桥安装计算问题》
4.1 斜拉桥安装计算问题
如图 2 所示的斜拉桥安装成形过程,安装计算的核心就是要找到中间状态(a)~(e)结构的内力和位移,使斜拉桥施工完成后状态(f)的内力和线形满足设计目标要求。根据无应力状态法的原理一,只要在结构分析时增加构件单元无应力状态量的条件,则结构的内力和位移与经历的过程无关,没有必要通过逐阶段分析去寻找中间施工过程。例如,要计算中间状态(c)的内力和位移,其实并不需要状态(f)→状态(e)→状态(d)→状态( c)的倒退分析,而只需令状态(c)结构已有单元的无应力状态量与成桥状态(f)相等,用分阶段成形结构的力学平衡方程(式(4))直接求解状态(c)的内力和位移,分析时荷载应采用当前状态的总荷载(非荷载增量)。同样的方法也可直接求解过程阶段(e),(d),(b),(a)的内力和位移[1,4,9]。
若利用式(4)直接求解的施工过程中间状态的内力不能满足施工阶段的结构安全的要求,说明斜拉索的无应力索长不能一次张拉到位,这时,用无应力状态法的第二个原理中的索长与索力变化的关系,斜拉索的无应力长度可以分次张拉到位。
《4.2 斜拉桥施工中的并行作业问题》
4.2 斜拉桥施工中的并行作业问题
混凝土斜拉桥主梁节段悬浇时,为了控制节段混凝土全部浇注完成时主梁上缘的拉应力水平,节段混凝土浇注前必须张拉 Cn 斜拉索,使主梁上缘储存一定的压应力。 当新浇节段混凝土数量较大时,往往由于 Cn 索在混凝土浇注前预张拉时主梁下缘拉应力控制,使上缘的预压应力不足,这时需要在主梁节段混凝土的浇注过程中增加一次调索。如图 8 所示。
《图8》
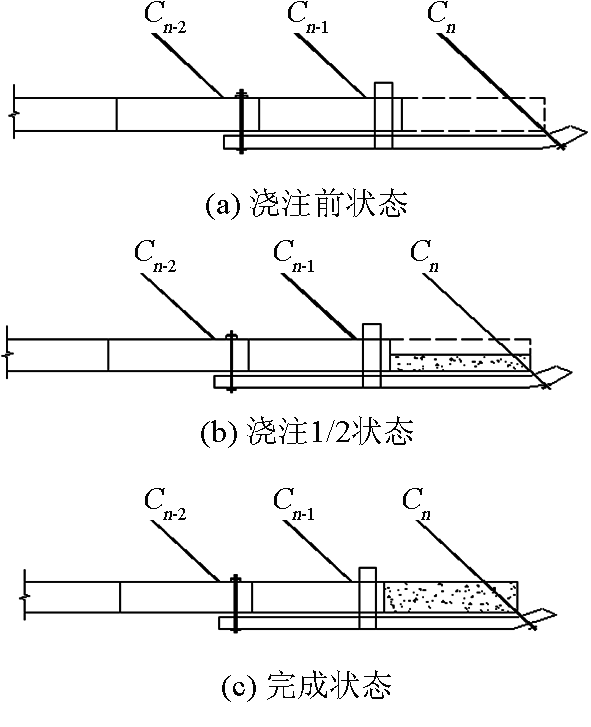
图8 节段混凝土浇注状态
Fig.8 State of concrete casting in segments
传统的做法是:节段混凝土浇注前预张拉 Cn 索至一定数值,浇注 1/2 节段混凝土,再次张拉 Cn 索,继续浇注节段混凝土直至完成。上述的做法存在如下问题:
1) 由于Cn 索的调整是以索力作为调整控制量,而索力与节段混凝土浇注的数量密切相关,1/2 节段混凝土数量在实践中很难准确估计,由于荷载估计不准,索力调整的精度差。
2) 由于施工现场的调索需要一定的时间,为了稳定桥上荷载而暂时中断现场的混凝土灌注会给施工带来风险。
3) 实践中,也有在 1/2 节段混凝土浇注完成时Cn 只粗略调整(不要求节段混凝土的重量准确),节段混凝土浇注完成时再将 Cn 索张拉至设计值。这样做的最大风险在于节段混凝土浇注完成时,接缝处混凝土一般已经初凝,再调索可能会影响节段混凝土的质量。
显然,若能实现混凝土浇注过程中同步并行调整斜拉索索力,则对保证工程质量意义重大,同时还可提高施工作业效率。
并行作业问题的核心是怎样在结构上荷载变化的情况下,准确实现设计要求的索力调整量。分阶段成形结构的力学平衡方程(式(4))有:
(a)节段混凝土浇注前状态:

(b)过程状态:

(c)节段混凝土浇注完成状态:

式(13)~式(15)

由式(16) 可以看出:不论经历如何的过程状态,只要{Pc - Pa },{L0c - L0a }确定,则状态(a)~(c)的内力和位移变化都是唯一的。只要以斜拉索无应力长度差值作为调索的控制量,就可以避免荷载变动对索力调整精度的影响。具体做法是:节段混凝土连续浇注,混凝土浇注过程中同步调整斜拉索索力,Cn 索的调整以步骤(c) 与步骤(a)两状态之间的无应力长度差来控制,同时预先通过计算设定 Cn 索调索的最早开始调索时间和最迟完成调索时间,确保结构的安全[4]。
斜拉桥施工中还有很多可以并行作业的工序,如多根斜拉索同时调整、悬浇挂篮移动与调索同时进行、钢筋帮扎与调索同时进行等。
《4.3 施工过程温度与临时荷载影响的过滤》
4.3 施工过程温度与临时荷载影响的过滤
斜拉桥实际施工时,斜拉桥上一般都布置有应力、索力、线形和温度测点。 在特定的监控测试阶段,选择凌晨日出前气温较为恒定的时段同时测试结构的应力、索力、线形和温度,当桥上有施工临时荷载时记录其大小和位置。由于测试的应力、索力和主梁线形数值有对应的温度和临时荷载,在计算机里很容易把应力、索力和线形的实测值修正至设计温度和标准荷载条件下的数值。这些经过标准化处理后的实测值与对应的中间施工过程理想状态的计算值进行对比,可以判断当前结构的状态,并决定下一阶段的操作,下达下道工序的操作指令。
上述施工测试的信息收集和制定控制对策的信息处理过程在理论上是严密的,实际操作的效果也是非常好的。但是,第三步信息的反馈———监控指令的执行却是一个难题。监控指令中的索力调整为设计温度条件下,不太可能要求现场的温度就是设计温度,对施工时的温度预测也是困难的,即使严格要求监控指令的施工操作在凌晨气温稳定时进行,但也只能消除日照温差的影响,况且这么做也是不实际的。所以传统做法监控指令的实施效果很差。
按照无应力状态法原理,如果监控指令中斜拉索的调整不用索力为调整依据,而是用两状态之间斜拉索无应力长度的差值作为调整的依据,则可完全避开温度和桥上施工临时荷载变动的影响。当用伸长量(无应力长度差值)调整时,即使温度和临时荷载与设计值有差异,桥上的实际索力变化与理论值不一致,但实际索力修正到设计温度和标准荷载时,索力的变化值必然等于理论计算值。
《5 结语》
5 结语
通常的结构分析方法是针对一次成形结构的,即先形成完整的结构体系再施加荷载,而分阶段成形结构,结构体系分阶段形成,结构上的荷载(主要是恒载)分阶段施加。传统的分阶段成形结构计算借用了一次形成结构的分析方法,并把在不同结构体系上计算的内力和变形增量逐阶段累加,这是用传统方法解决分阶段成形结构过程控制问题处理困难的直接原因。
笔者利用能量法建立了分阶段成形结构任意状态的力学平衡方程,由平衡方程得出了无应力状态控制法的两个基本原理。无应力状态控制法原理从理论上解决了结构恒载分阶段施加于不断变化的结构体系上的分阶成形结构过程状态之间、过程状态与最终状态的关系问题。通过单元的无应力状态量可以由桥梁最终恒载状态直接求解桥梁施工中间过程状态的内力和线形,解决了斜拉桥的安装计算问题;利用在构件单元无应力状态量一定的前提下,最终状态的内力和位移与施工过程无关的原理,可实现施工中的多工序并行作业,解决了施工中临时荷载和温度影响的自动过滤问题。
无应力状态法适用于所有结构形式和施工方法的分阶段施工桥梁,1992 年首次提出[5],目前已大范围推广,已在 29 座各种类型的大跨度桥梁成功应用[1,10,11]。











 京公网安备 11010502051620号
京公网安备 11010502051620号




