《1 前言》
1 前言
提升绳系的弹性振荡主要发生于提升机的起动或制动过程中, 它决定着提升容器的乘坐舒适性和提升钢绳中动张力的大小, 而主要取决于提升绳系特性、提升负载变化规律和提升机驱动系统瞬态输出加速度即绳系的激励加速度;在绳系、负载特性一定的条件下, 又取决于提升机驱动系统的输出加速度。Jan Hankus, Jacek Zarudzki, 潘英, 梁兆正等, 对提升机绳系尤其是安全制动情况下, 绳系的振动和动张力特性进行了研究, 取得许多有意义的结论[1 ,2 ,3 ,4 ]
朱昌明等关于垂直运行交通工具的乘坐舒适性问题做了详细研究并在液压电梯设计中得到应用[5 ,6 ] ρ ≤ 2 m/s3 , 不舒适感可以减到最小程度, 当ρ ≥5 m/s3 时, 就会使人感到不舒适。
确定提升机绳系的激励加速度, 使提升容器既能获得满足舒适性基本要求的加速度曲线, 又能保证提升钢丝绳产生较小的动张力, 并易于实现, 这仍需做进一步研究与探讨。基于钢绳为连续弹性杆的条件, 建立提升钢丝绳系的偏微分方程, 采用特性线数值分析方法, 以满足提升容器的乘坐舒适性和提升钢丝绳产生较小动张力为目标, 反演设计了矿井提升机械驱动系统的合理激励加速度。
《2 提升绳系微分方程的建立》
2 提升绳系微分方程的建立
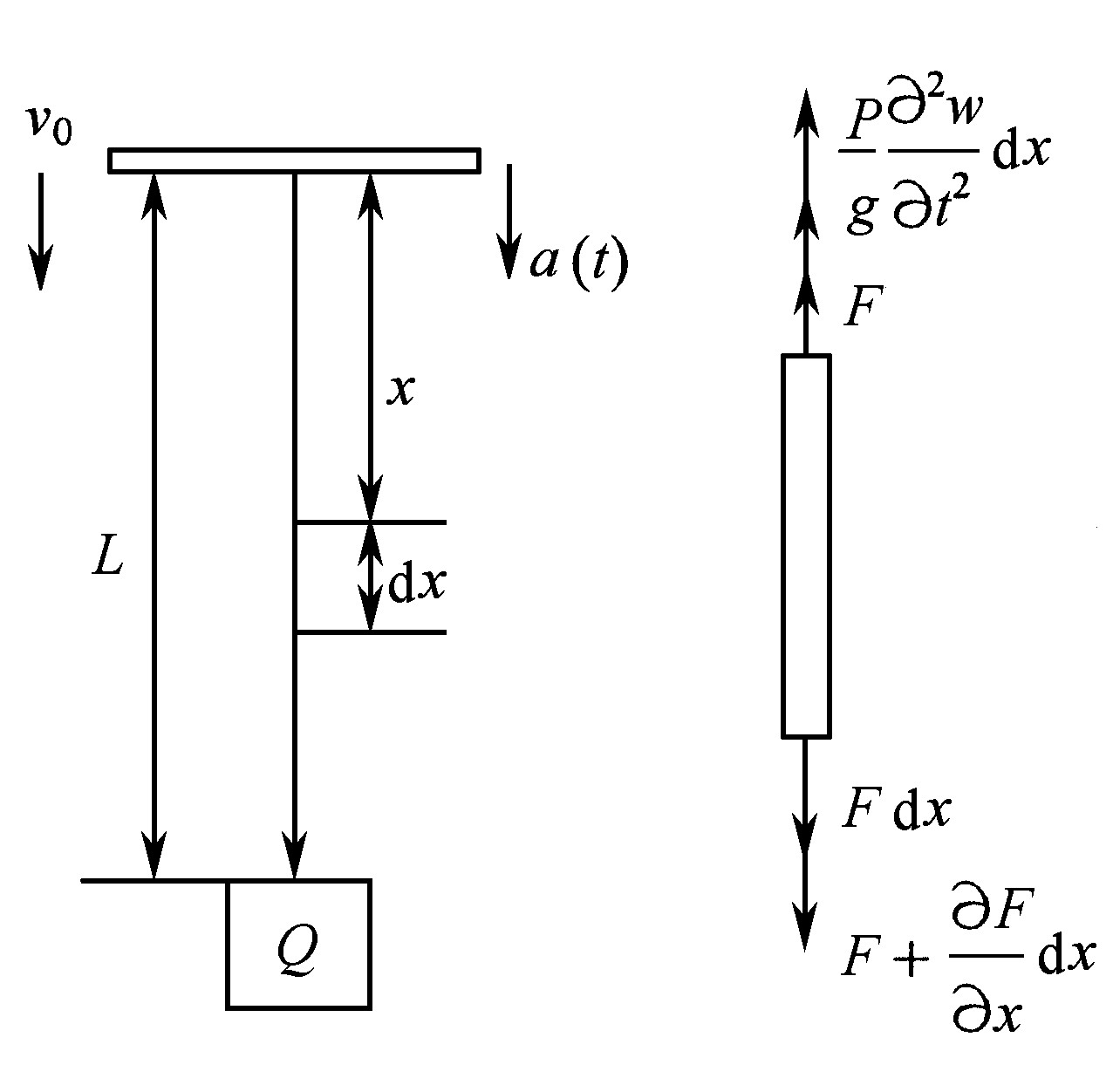
基于如下假设:a.不计天轮与滚筒及其间钢绳的弹性;b.钢绳与提升滚筒间没有相对滑动;c.悬垂提升钢丝绳为连续弹性体;d.不考虑提升容器在运行过程中与罐道的摩擦阻力和风流阻力, 则提升机驱动系统的输出加速度为提升滚筒的加速度, 也即为提升绳系的激励加速度。提升绳系力学模型如图1所示。
《图1》
图1提升机绳系力学模型
Fig.1 Physics model of winder rope system
图1中:F 为绳中的动张力, F = − A E ∂ v ∂ x F = - A E ∂ v ∂ x
a (t ) 为滚筒的输出加速度, 即绳系的激励加速度;
v 0 为提升机加、减速度前的最大运行速度, 起动时v 0 = 0;
Q 为终端荷重, 其中包括容器、有益载荷和尾绳质量;
L 为主绳的悬垂长度, 因加、减速运行与匀速运行距离相比很小, 可认为加减速过程中L 不变;
A 为钢丝绳的横断面积, 假定提升机工作过程中A 值不发生变化。
不计提升钢丝绳与其表面上的粘性阻力并将钢绳质量集中到负荷Q 上, 得钢绳中的偏微分方程[7 ]
∂ 2 w ∂ t 2 − C 2 ∂ 2 w ∂ x 2 = 0 。 ( 1 ) ∂ 2 w ∂ t 2 - C 2 ∂ 2 w ∂ x 2 = 0 。 ( 1 )
这是一维弹性杆的标准波动力力学方程, 式中C 为弹性波在钢丝绳中传播速度, 它是钢丝绳的一个物理常量, C = E A g p − − − − √ C = E A g p E 为钢丝绳的弹性模量。
式 (1) 是用位移表达的微分方程, 经适当变换可以表达成速度、作用力的二阶偏微分方程。为了求解方便, 也可采用含有速度v 和作用力F 两个未知函数的一阶偏微分方程组, 且与含有一个未知函数的二阶偏微分方程等价, 即
ρ A ∂ v ∂ t + ∂ F ∂ x = 0 A E ∂ v ∂ x + ∂ F ∂ t = 0 } 。 ( 2 ) ρ A ∂ v ∂ t + ∂ F ∂ x = 0 A E ∂ v ∂ x + ∂ F ∂ t = 0 } 。 ( 2 )
∂ v ( x = 0 , t ) ∂ t = a i ( t ) ‚ ∂ v ( x = 0 , t ) ∂ t = a i ( t ) ‚
− Q g ∂ v ( x = L , t ) ∂ t = F ( x = L , t ) , ∂ v ( x = L , t ) ∂ t = a o ( t ) ‚ - Q g ∂ v ( x = L , t ) ∂ t = F ( x = L , t ) , ∂ v ( x = L , t ) ∂ t = a o ( t ) ‚
v (0≤x ≤L , t =0) =v 1 , 制动时v 1 =v 0 , 起动时v 1 =0) ;
x ∗ = x / L t ∗ = c t / L , v ∗ 1 = v 1 / v 0 , F ∗ = F / ρ c A v 0 , a ∗ i = a i / v 0 c / L , a ∗ o = a o / v 0 c / L 。 x * = x / L t * = c t / L , v 1 * = v 1 / v 0 , F * = F / ρ c A v 0 , a i * = a i / v 0 c / L , a o * = a o / v 0 c / L 。
∂ v ∗ ∂ t ∗ + ∂ F ∗ ∂ x ∗ = 0 , ∂ v ∗ ∂ x ∗ + ∂ F ∗ ∂ t ∗ = 0 , ∂ v ∗ ( x ∗ = 0 , t ∗ ) ∂ t ∗ = a ∗ i , k ∂ v ∗ ( x ∗ = 1 , t ∗ ) ∂ t ∗ = F ∗ ( x ∗ = 1 , t ∗ ) , ∂ v ∗ ( x ∗ = 1 , t ∗ ) ∂ t ∗ = a ∗ o ‚ v ∗ ( 0 ≤ x ∗ ≤ L , t ∗ = 0 ) = v ∗ 1 , F ∗ ( 0 ≤ x ∗ ≤ L , t ∗ = 0 ) = 0 。 ⎫ ⎭ ⎬ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ( 3 ) ∂ v * ∂ t * + ∂ F * ∂ x * = 0 , ∂ v * ∂ x * + ∂ F * ∂ t * = 0 , ∂ v * ( x * = 0 , t * ) ∂ t * = a i * , k ∂ v * ( x * = 1 , t * ) ∂ t * = F * ( x * = 1 , t * ) , ∂ v * ( x * = 1 , t * ) ∂ t * = a o * ‚ v * ( 0 ≤ x * ≤ L , t * = 0 ) = v 1 * , F * ( 0 ≤ x * ≤ L , t * = 0 ) = 0 。 } ( 3 )
式中k 为负荷与钢绳的质量之比, k =-Q /ρAgL 。
《3 反演设计方法》
3 反演设计方法
特征线方法是求解双曲线型偏微分方程组的常见数值分析方法, 根据特征线理论式 (3) 的特征线方程和相应的相容关系方程为[9 ,10 ]
d t ∗ ∓ d x ∗ = 0 d v ∗ ± d F ∗ = 0 } 。 ( 4 ) d t * ∓ d x * = 0 d v * ± d F * = 0 } 。 ( 4 )
将钢丝绳离散成n 等分, 相应的时间步长为Δt * =1/n , 空间步长为Δx * =1/n , 并将各离散网格从左到右连续编号, 形成图2所示的特征线网格。
考察网格中a , b , c 三点, 设b (i +1, j -1) 和c (i -1, j -1) 为已知点, a (i , j ) 为待求点, 得到以下差分方程
F ∗ i , j − F ∗ i − 1 , j − 1 + v ∗ i , j − v ∗ i − 1 , j − 1 = 0 ‚ i = 0 , ⋯ ‚ n , ( 5 a ) F i , j * - F i - 1 , j - 1 * + v i , j * - v i - 1 , j - 1 * = 0 ‚ i = 0 , ⋯ ‚ n , ( 5 a )
《图2》
图2提升钢绳模型及网格
Fig.2 Hoisting rope model and gridding
F ∗ i , j − F ∗ i + 1 , j − 1 + v ∗ i , j − v ∗ i + 1 , j − 1 = 0 ‚ i = 0 , ⋯ , n − 1 。 ( 5 b ) F i , j * - F i + 1 , j - 1 * + v i , j * - v i + 1 , j - 1 * = 0 ‚ i = 0 , ⋯ , n - 1 。 ( 5 b )
v ∗ 0 , j − v ∗ 0 , j − 1 = a ∗ i ( j / n ) / n , ( 6 a ) k ( v ∗ n , j − v ∗ n , j − 1 ) = F ∗ n , j / n , ( 6 b ) v ∗ n , j − v ∗ n , j − 1 = a ∗ o ( j / n ) / n , ( 6 c ) v ∗ i , 0 = v 1 , F ∗ i , 0 = 0 , i = 0 , ⋯ , n − 1 。 ( 6 d ) v 0 , j * - v 0 , j - 1 * = a i * ( j / n ) / n , ( 6 a ) k ( v n , j * - v n , j - 1 * ) = F n , j * / n , ( 6 b ) v n , j * - v n , j - 1 * = a o * ( j / n ) / n , ( 6 c ) v i , 0 * = v 1 , F i , 0 * = 0 , i = 0 , ⋯ , n - 1 。 ( 6 d )
由式 (5) 展开与式 (6) 联立构成了2 (n +1) 元线性方程组, 若绳系的激励加速度a i t ) 已知, 由联立方程组结合定解条件就可从j =0开始依次求得各时刻t * =j Δt * 的绳系动张力与动态速度及相应的响应加速度, 这就是已知具体激励加速度求绳系响应的力学分析原理, 亦称为正问题, 而将由提升容器振荡加速度求激励加速度称为反演设计。
绳系中某一截面上的动张力与振荡速度、加速度求解是依时间分析, 而由某一点的参数求整个绳系的参数, 必须采用依空间的波动力学分析方法。为此现考察网格中a , d , c 三点, 设a (i , j ) 和 d (i , j -2) 为已知点, 而c (i -1, j -1) 为待求点, 由特征方程和相容关系方程式可得如下差分方程
F ∗ i , j − F ∗ i − 1 , j − 1 + v ∗ i , j − v ∗ i − 1 , j − 1 = 0 , ( 7 a ) F ∗ i − 1 , j − 1 − F ∗ i , j − 2 + v ∗ i − 1 , j − 1 − v ∗ i , j − 2 = 0 。 ( 7 b ) F i , j * - F i - 1 , j - 1 * + v i , j * - v i - 1 , j - 1 * = 0 , ( 7 a ) F i - 1 , j - 1 * - F i , j - 2 * + v i - 1 , j - 1 * - v i , j - 2 * = 0 。 ( 7 b )
F ∗ i − 1 , j − 1 = ( F ∗ i , j − 2 + F ∗ i , j + v ∗ i , j − v ∗ i , j − 2 ) / 2 , ( 8 a ) v ∗ i − 1 , j − 1 = ( v ∗ i , j − 2 + v ∗ i , j + F ∗ i , j − F ∗ i , j − 2 ) / 2 。 ( 8 b ) F i - 1 , j - 1 * = ( F i , j - 2 * + F i , j * + v i , j * - v i , j - 2 * ) / 2 , ( 8 a ) v i - 1 , j - 1 * = ( v i , j - 2 * + v i , j * + F i , j * - F i , j - 2 * ) / 2 。 ( 8 b )
式 (8) 是依空间坐标i 到i -1点分析方法的基本公式。在钢丝绳末端条件已知的条件下, 即可通过程序的编辑实现输入激励求解。
《4 反演结果与分析》
4 反演结果与分析
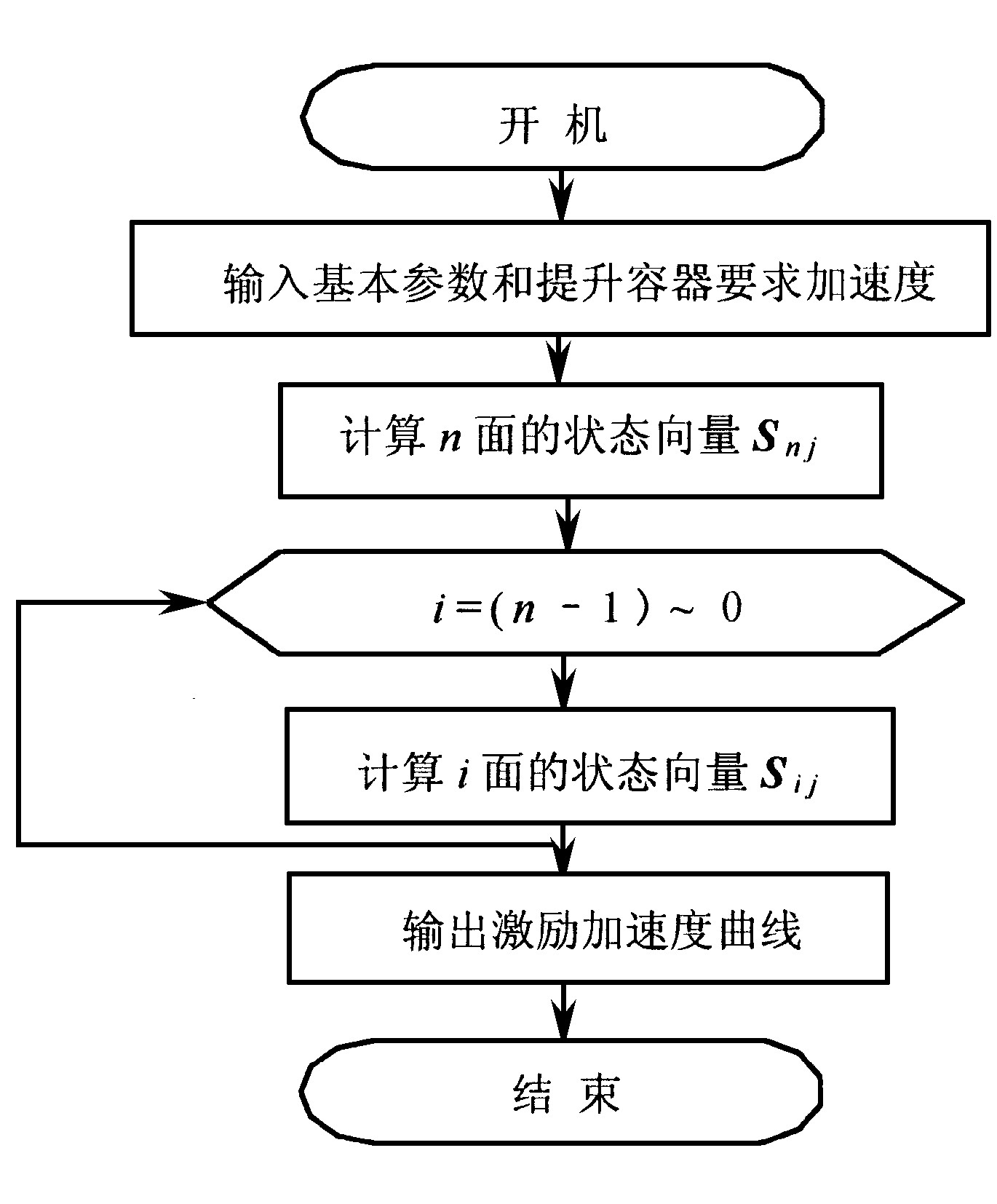
根据以上推导与分析, 以NJM4×4提升机为例, 应用MATLAB工具编制了反演设计程序, 其程序框图如图3所示。
《图3》
图3反演设计程序
Fig.3 Inverse designing program
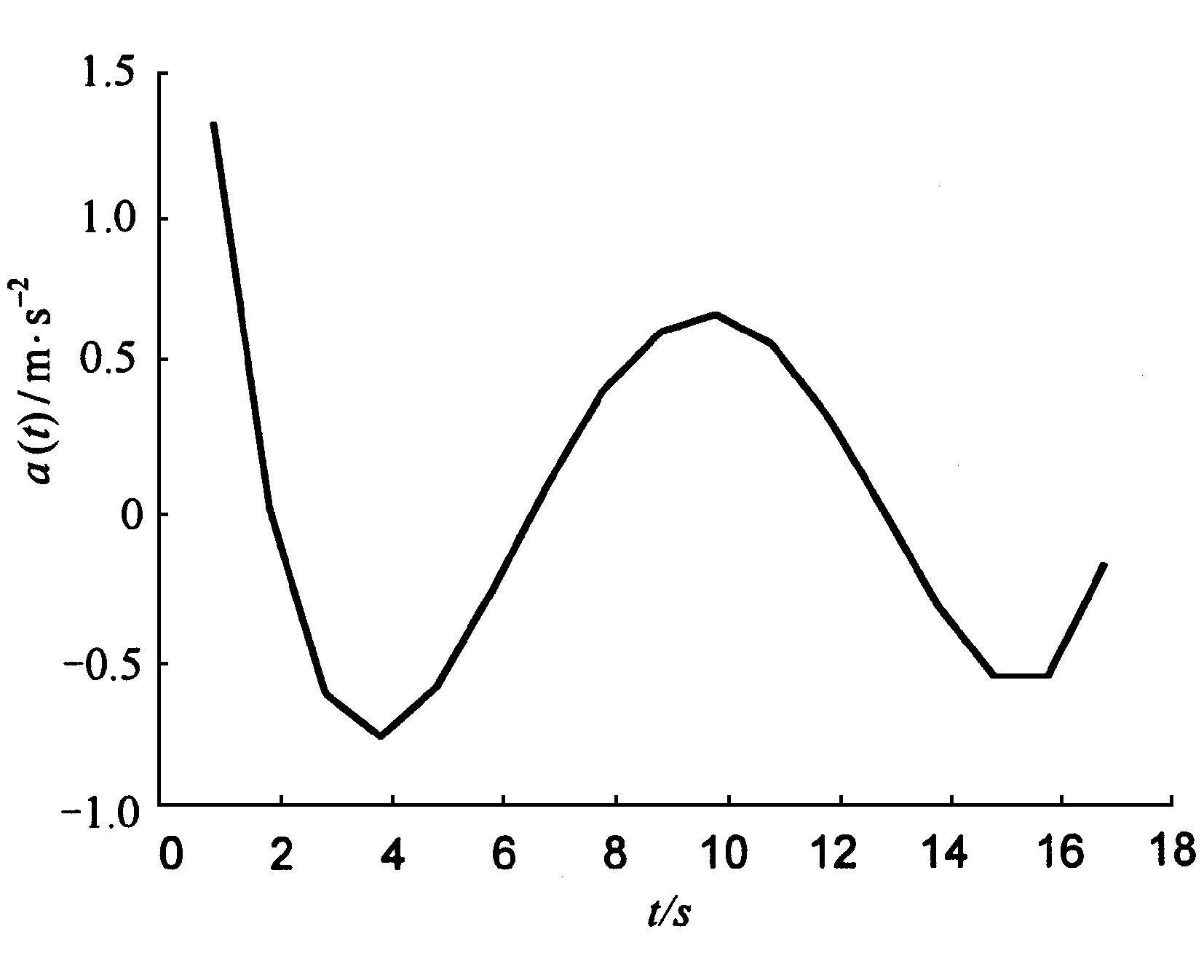
对任一满足乘坐舒适性基本要求的加速度方程, 都可反演得到相应的激励加速度曲线, 经频谱分析得知, 这是一组由方程p L Q = ω i L C t g ω i L C p L Q = ω i L C t g ω i L C a ( t ) = v 0 2 π T 0 = sin π t T 0 a ( t ) = v 0 2 π Τ 0 = sin π t Τ 0 T 0 加减速时间, v 0 为最大运行速度) , 运行反演程序, 并经曲线拟合得到如图4所示的激励加速度曲线, 这与输入激励为正弦函数, 按正问题求解得到的提升容器的加速度方程相似。
《图4》
图4反演激励加速度
Fig.4 Inverse prompting acceleration curve
a ( x , t ) = ∑ n = 1 ∞ ( A n i sin ω i x + B n i cos ω i x ) sin ω i t ( 1 0 ) a ( x , t ) = ∑ n = 1 ∞ ( A n i sin ω i x + B n i cos ω i x ) sin ω i t ( 1 0 )
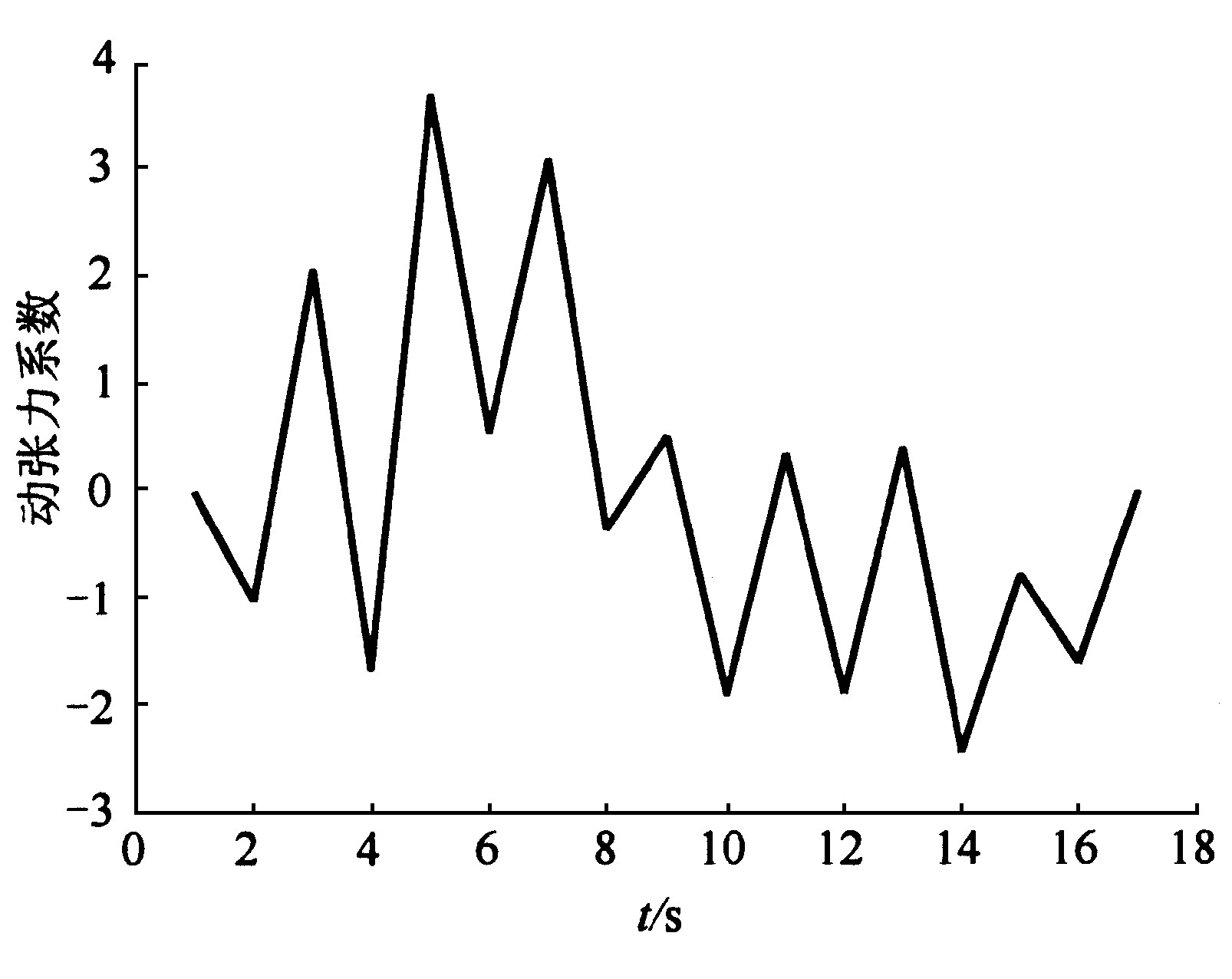
图5为反演分析得到的钢绳中x =0.5 L 处的动张力系数变化情况。
《图5》
图5x =0.5L 钢绳中的动张力变化情况
Fig.5 The varying dynamic tensile force of ropeat x = 0.5 L
若将式 (10) 作为激励加速度并经反演程序运行, 也将得到近似正弦曲线。这说明在本文的条件下, 提升钢绳系具有可逆特性。
考虑式 (10) 所对应的加速度函数也满足加速度变化率连续、没有突变的乘坐舒适性基本要求, 驱动系统实现加速度曲线的难易程度, 根据绳系激励与响应可逆工作的特性, 也可将a ( t ) = v 0 2 ⋅ π T 0 sin π t T 0 a ( t ) = v 0 2 ⋅ π Τ 0 sin π t Τ 0
同样可从正反两方面比较若干满足乘坐舒适性基本要求的加速度曲线, 如a ( t ) = v 0 2 ⋅ π T 0 ( 1 − cos π t T 0 ) , a ( t ) = a 0 2 ( 1 − sin π t T 0 ) , a ( t ) = v 0 2 π T 0 cos π t T 0 a ( t ) = v 0 2 ⋅ π Τ 0 ( 1 - cos π t Τ 0 ) , a ( t ) = a 0 2 ( 1 - sin π t Τ 0 ) , a ( t ) = v 0 2 π Τ 0 cos π t Τ 0 a ( t ) = v 0 2 π T 0 ( 1 − cos π t T 0 ) a ( t ) = v 0 2 π Τ 0 ( 1 - cos π t Τ 0 ) a ( t ) = v 0 2 π T 0 sin π t T 0 a ( t ) = v 0 2 π Τ 0 sin π t Τ 0
笔者在研究中忽略了提升容器在运行中的各种阻力, 且是在起动工况下研究得到的结论。对加速、减速提升、加减速下降负载的情况和考虑提升容器阻力和与提升钢丝绳波阻条件下进行研究, 得到的结论也基本相同。
《5 结语》
5 结语
1) 合理的激励加速度决定着提升容器的乘坐舒适性和提升钢绳中动张力的大小, 过大的动张力将导致滑绳 (摩擦提升) 或断绳 (缠绕式提升) 。运用反演分析与设计的方法对满足提升容器乘坐舒适性与在提升钢绳中产生较小动张力的激励加速度进行研究, 对提升机的进一步研究与设计具有一定的理论与实用意义。
2) 考虑提升机驱动系统的可实现性应选择相对简单的函数作为激励, 在目前提升机驱动系统容易产生的激励加速度曲线中a ( t ) = a o 2 ( 1 − cos π t T 0 ) , a ( t ) = v 0 2 π T 0 sin π t T 0 a ( t ) = a o 2 ( 1 - cos π t Τ 0 ) , a ( t ) = v 0 2 π Τ 0 sin π t Τ 0












 京公网安备 11010502051620号
京公网安备 11010502051620号




