

1 引言
广义预测控制器 (GPC)
GPC的设计通常基于一个较低阶的线性近似模型, 而复杂的工业过程或航天航空过程, 在模型阶次、非线性性、未知环境扰动等方面存在较大的不确定性, 因而研究GPC的鲁棒性程度, 探讨GPC的参数设计对其鲁棒性的影响具有重要的理论意义与实际应用价值。但是对GPC的鲁棒性分析难度较大, 主要是由于GPC是以大范围预测为基础的在线滚动优化策略, 使得其闭环传递函数较为复杂, 主要设计参数蕴含在闭环传递函数中, 难以推导出设计参数和闭环特性之间的定量关系。陈增强等
然而, 传统的由反馈系统的偏差的比例 (P) 、积分 (I) 、和微分 (D) 的线性组合构成的反馈控制律——PID控制, 由于具有原理简单, 直观易懂, 易于工程实现, 鲁棒性强, 适用面广等一系列优点, 仍一直是工业过程控制中应用最广泛的一类基本控制律。为了应用这两种控制方法的长处, 把PID控制和GPC控制结合起来, 可形成一种新的预测控制方法 (PID-GPC) 。这个方法采用了比例加积分加微分的新的目标函数, 因此推导的控制器具有一种广义的“比例+积分+微分”的结构。
首先推导了PID-GPC控制下的闭环反馈结构, 并获得了闭环鲁棒稳定的一个充分条件, 然后采用频域的幅频分析的方法, 分析了PID-GPC控制器的设计参数选择对系统鲁棒性的影响。因而能够有效地指导PID-GPC的参数设计, 对这种新型控制方法的工程应用具有重要意义。
2 PID广义预测控制器 (PID-GPC)
用离散时间差分方程模型
![]()
描述一个单输入单输出的过程, 其中

y (t) 和u (t) 分别表示系统的输出和输入, q-1为后移算子, {ai}, {bi}和{ci}分别为A, B和C 3个多项式的系数, na, nb和nc为对应的阶次。
PID-GPC 目标函数如下:

其中N为预测前位。Nu为控制前位。λ>0为控制加权因子。Kp, Ki, Kd 分别为比例项系数、积分项系数和微分项系数。

产生, 其中yr (t) 为t时刻的设定值, α (0≤α<1) 为柔化因子。
j=1, 2, …, N 为获得系统输出的向前j步最优预测, 解两组丢番图方程:
![]()
其中Ej, Fj, Gj, Hj为关于q-1的多项式, 阶次分别为 j-1, na, nb-1。
由式 (1) 、式 (5) 和式 (6) 可得

其中

最优预测

定义
![]()
则
![]()
令

为了推导方便, 引入向量和矩阵:

其中gi是Gj (q-1) 中q-i项的系数。
这样得到

将式 (2) 化成向量形式, 可得
![]()
令∂J/∂U = 0, 并化简, 最终可得

将矩阵

引入上面式子, 简化得

令Ω=KiI+KpSTS+Kd (S2) T (S2) , 则

即

将上式化为
![]()
其中

3 PID-GPC鲁棒性的频域分析
被控对象仍同式 (1) , 为下面分析简单起见, 令C (q-1) = 1和忽略ξ (t) , 设系统的实际模型为
![]()
辨识模型为
![]()
那么系统的建模误差 (MPM)
![]()
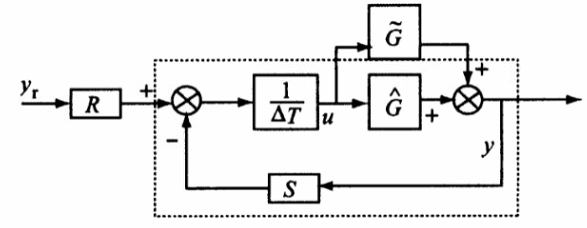
由前面的推导, 闭环反馈系统的结构图可以化为如图1所示。

《图1 PID-GPC 的反馈结构图》
图1 PID-GPC 的反馈结构图
Fig.1 The feedback structure of PID-GPC
图1 中的虚线部分记为M, 易得
![]()
据图1, 由小增益定理, 可直接得到下面定理。
定理1 如果控制器的设计使M (q-1) 稳定 (即![]() 根在单位圆内) , 带有附加扰动的闭环系统稳定的一个充分条件是
根在单位圆内) , 带有附加扰动的闭环系统稳定的一个充分条件是

推论1 稳定界|1/M (e-jω) |的稳态增益等于过程模型的稳态增益。
证明 由式 (31) 得
![]()
因为Δ (e-jω) =1-e-jω, 在稳态 (ω=0) , Δ (e-jω) =0, 代入式 (32) 可以直接得证。
从推论可知, 在低频时, (1/M (e-jω) |受过程模型的影响比控制器的影响大。如果未建模部分的稳态增益超过了过程模型的稳态增益, 则PID-GPC的稳定性不能保证。
4 仿真研究
仿真模型的传递函数取为
![]()
采样周期取Ts=1, 模型离散化后为

采用方波输入, 最小二乘辨识, 取na=1, nb=1, 得到的辨识模型为

下面通过对参数的调整, 来测试各个参数对频域鲁棒界的影响。
《4.1Ki的影响》
4.1Ki的影响
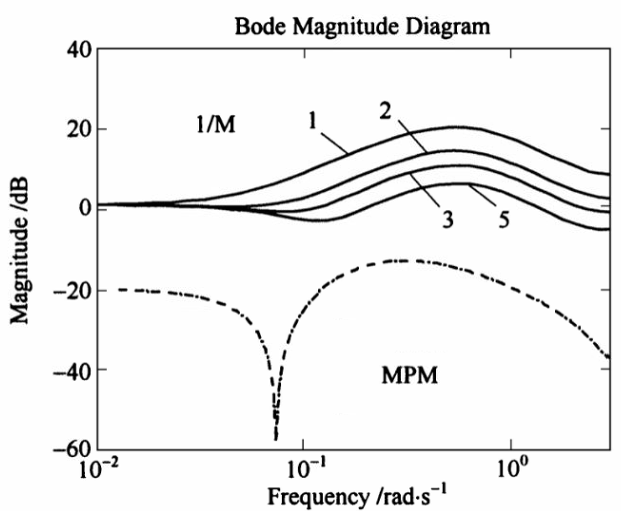
图2画出了MPM曲线, 以及Ki取不同值时的|1/M (e-jω) |曲线。其中Nu=3, N=3, α=0, λ=5, Kp =0, Kd=0。图2表明, 随着Ki的增大, 鲁棒区域 (|1/M (e-jω) |和|

《图2Ki对稳定界变化的影响效果》
图2Ki对稳定界变化的影响效果
Fig.2 Effect of Ki on stability bound
《4.2Kp的影响》
4.2Kp的影响
从图3可以看出, 增大Kp, 虽然可以使控制器的跟踪加快, 但鲁棒性降低了。其中Nu=3, N=3, α= 0, λ=1, Ki=1, Kd=0。

《图3Kp对稳定界变化的影响效果》
图3Kp对稳定界变化的影响效果
Fig.3 Effect of Kp on stability bound
4.3Kd的影响
从图4可以看出, 增大Kd, 可以使控制器的跟踪加快, 鲁棒性也增加了。其中Nu= 3, N=3, α= 0, λ= 0.5, Ki = 1, Kp = 0

《图4Kd对稳定界变化的影响效果》
图4Kd对稳定界变化的影响效果
Fig.4 Effect of Kd on stability bound
5 结论
推导了PID-GPC的闭环反馈结构, 采用频域中幅频分析的方法分析控制系统的鲁棒性, 并指导PID-GPC的参数设计。所获得的设计方法有重要的工程实用价值。为预测控制的推广与应用开辟了一条有效的途径。
参考文献
[3] 陈增强, 袁著祉, 李玉梅, 等.工业锅炉的加权预测自校正控制[J].自动化学报, 1993, 19 (1) :46~53
[4] 孙明玮, 陈增强, 袁著祉.飞航导弹高精度自适应预测控制设计[J].中国工程科学, 2005, 7 (10) :23~27
[8] 毛宗星, 陈增强, 孙青林, 等.基于频域的广义预测控制器 (GPC) 的稳定性分析[J].控制与决策, 2002, 17 (6) :859~862
[9] 孙青林, 陈增强, 袁著祉.基于频域的多变量广义预测控制器稳定性分析[J], 中国工程科学, 2004, 6 (10) :39~44
[10] 毛宗星, 陈增强, 孙青林, 等.基于频域的广义预测控制器 (GPC) 的鲁棒性分析[J].华东理工大学学报, 2002, 28 (增刊) :15~19











 京公网安备 11010502051620号
京公网安备 11010502051620号




