

《1 综述》
1 综述
根据国家统计局的报告, 2000年我国国民生产总值已达到8.9×104亿元, 人均GDP超过830美元, 北京已达到2 700美元, 上海、深圳等部分沿海城市已达到4 000美元。这个数字表明, 按照发达国家的发展规律, 当人均GDP达到800美元时, 汽车工业将有一个突变式的增长, 家庭将逐渐形成对汽车的购买力;当人均GDP达到1 000美元时, 汽车的千人拥有量将达到20辆, 汽车生产进入高速增长期, 这一时刻在美国是1920年, 在西德是1956年, 在日本是1965年。我国国民经济发展速度若按7%~8%计算, “十五”期间正是汽车大量进入家庭的时期, 如果有1%的家庭买车, 全国大约需要300×104辆, 此时千人汽车保有量约25辆。
未来几年这么多的汽车进入市场, 驶向马路, 所造成的交通拥堵, 单靠修路是解决不了的, 那样会耗费巨额资金, 占用大量耕地, 牺牲大片生态环境。现在已经进入后PC时代。一种可行的办法就是发展高科技, 充分利用免费提供定位信息的全球定位系统。
GPS (全球定位系统) 于1973年由美国空军牵头筹建, 1993年建成并投入使用。它能提供七维 (三维位置, 三维速度, 一维时间) 全方位、全天候、实时高精度的信息服务。美国1996年就开发出80多种具有竞争力的GPS产品, 给美国创造了十几万个就业机会
近几年来GPS接收机芯片的年综合增长率 (CAGR) 都在58%以上, 价格则逐年下降
我们就是利用这种低功耗的微型芯片, 分三层组装成GPS电子表, 再与GPS星载原子钟频率比对, 可以得到几百纳秒级的时间精度, 供运动员、旅游者使用, 同时也为广告业提供高精度免维护的广告钟。在高尔夫球杆上嵌入微型GPS定位测距仪, 可以准确地测量出高尔夫球的飞行距离, 增加球场主和球手的乐趣。
我们把GPS和电子地图数据库预装在掌上电脑里, 大大地增加了它的功能。把GPS微形芯片与移动电话集成, 除了能自动报警、提供急救外, 还能给出发生事件地理位置的信息。
我们还设计出装有GPS和MEMS (微电子机械系统) 低精度陀螺传感器的模型飞机玩具, 它可以在GPS设定的范围内自由飞翔, 开拓了玩具市场。我们应该充分利用GPS免费提供的信息资源, 创造更大的市场。目前正是入市良机。
20世纪80年代末世界两大阵营对峙的冷战状态结束后, 导致兵器工业的萎缩。一些原来只用于军事上的高新技术纷纷转向民用领域。我们把制导技术中的GPS导航, 由推算定位技术组成的自律导航和地图匹配技术应用到汽车上, 可以构成三重精度的汽车导航系统。从而实现汽车的门对门 (door to door) 服务。
《2 汽车导航系统的构成》
2 汽车导航系统的构成
汽车导航系统主要是近代信息技术、数据通信技术和自动控制技术等通用电子技术在汽车电子领域移植的集成。它包括GPS导航、自律导航、微处理器 (MPU或DSP) 、DVD-ROM驱动器、TFT-LCD显示器、地图匹配器以及电子地图数据库等相应的软件, 见图1。
《图1》

图1 汽车导航系统方框图 Fig.1 Car navigation system's block diagram
《2.1GPS导航》
2.1GPS导航
GPS是由分布在与地球赤道面倾角55°的6个轨道面上的24颗卫星 (21颗工作星, 3颗备份星) 组成的, 其运行周期为118 min, 轨道平面高度为20 200 km, 这样分布是为了保证每天出现在地平线以上的卫星数目为4~11颗 (最多不超过12颗) , 见图2
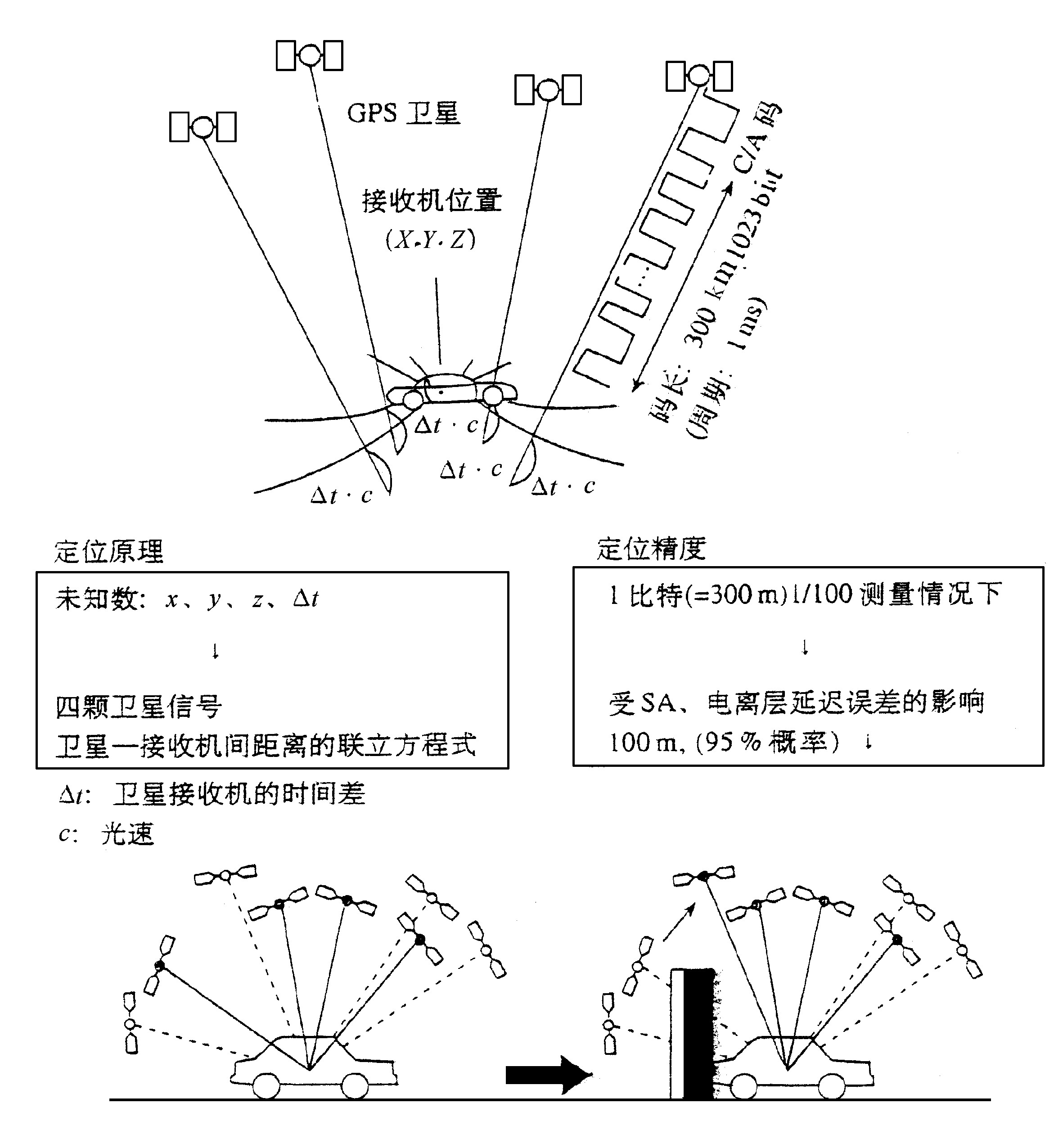
GPS卫星播发的信号有:载波信号 (其频率为L1=1 575.42 MHz, L2=1 227.6 MHz) 、P码、C/A码、导航电文等, 汽车导航接收的是C/A码, 码长为1 023 bit, 码宽为0.977 52 μs, 一个周期的码长为299.79 km≈300 km。C/A码有1 023种不同结构, 不同的卫星采用不同结构的C/A码。如果接收机精度取码宽的1%, 观测精度就是2.9 m。
根据三角学测量定位原理, 测量三颗卫星的距离就可以定位。但由于卫星钟与接收机钟很难保持同步, 我们把接收机钟差也作为一个未知数, 与其他测量坐标数据一并求解, 这样在一个观测点就须求解4个未知数 (3个坐标点和1个钟差) , 即要同时观测到4颗卫星的数据, 见图3。
汽车导航要求在高速行驶的动态环境中定位, 使GPS的载波信号产生“多普勒频移”, 载波跟踪环失锁, 丢失载波跟踪距离变化测量的“导航解”, 所以要特别注意对多普勒频移的估算方法。如果采用卡尔曼滤波技术或多星技术, 应选用12通道的接收机, 因为采用多通道接收机时, 接收的卫星数目增加1倍, 定位噪声就会降低3 dB, 从而提高定位精度。12通道接收机会简化和优化选星的繁琐程序, 减轻CPU运算的负担。汽车在高速行驶时GPS信号的副载波会产生时延, 使卫星星历难以获取, 设计与工程中都要加以注意。
GPS天线应选用装有高灵敏度纳伏级的前置低噪声放大器和变频级的有源圆环微带天线, 增益为26~30 dB;接收机选用已装配好且经过全面检测的OEM模块, 这比在芯片上设计要经济得多
《2.2自律导航》
2.2自律导航
当汽车行驶在隧道、高层楼群、高架桥下以及密集森林等地段时, 由于遮挡, 汽车与卫星失去联系, 我们用车速传感器自动地从汽车前进的速度中检测出车速脉冲, 通过微处理器的运算直接由速度和时间中求出行驶的距离。汽车在高速行驶时轮胎会膨胀, 用轮胎转速求出的距离会产生误差, 应取一个向上的距离系数来修正, 见图4。
当汽车行驶在发夹式弯路、蛇形路面、勾状山道, 以及遇有雪地打滑、轮渡过河、更换轮胎与环状盘形桥时, 汽车的前进方向和行驶状态 (即汽车行驶的角速度) 都会发生变化, 须通过陀螺传感器对航向绝对位置进行检测和修正, 才能得到汽车的正确定位坐标
由于使用了多种传感器, 它们具有不同的性质和工作方式, 应在系统中对各种传感器进行数据融合 (data fusion) , 把来自具有互补性质的不同信号源的信息融合成一种表达方式, 这个过程就是推算定位法 (dead reckoning) 。当GPS信号质量较好时, 可以GPS信号和推算定位信息的差值, 送至卡尔曼滤波器中, 估算出推算定位的误差, 加以修正;当GPS信号被遮挡后, 系统会自动进入推算
《图4》

图4 车速传感器的距离修正 Fig.4 Amendment of distance coefficient for wheel speed sensors
定位系统, 此时推算定位系统经过卡尔曼滤波器的估算和修正, 系统可以在一定时间内保持一定精度。在校正过程中为确保精度, 计算量相当大, 增加了系统的计算负担, 所以CPU应选择快速32 bit的。
这种不受时间、地点、路况影响, 而又具有一定精度的导航方法称之为自律导航或自主导航。
《2.3地图匹配器》
2.3地图匹配器
GPS导航和自律导航都能给出一定精度的定位信息, 但是在实际运行环境中, 由于种种原因有时收不到GPS的正确信号, 自律导航中的传感器数据融合技术所检测到的定位信息也存在着一定误差, 这种误差会随着时间的推移产生累积, 这两种组合定位精度的降低集中反映在显示车辆正确位置的鼠标上, 鼠标不能显示在电子地图上的道路中央, 尽管电子地图经过GPS校准且具有一精度。为了解决这个矛盾应采取地图匹配技术 (map matching) 。
地图匹配器的工作原理是把汽车行驶轨迹与数字地图数据库提供的路径进行相关比较, 它实际上是一个数字相关比较器。当推算定位给出汽车在地图上某一位置时, 推算定位的数据就与电子地图上的数据进行相关比较, 通过地图匹配器把汽车的位置调整到地图上的“绝对”位置。也就是用GPS的输出将行驶在道路上的汽车匹配到相应道路指定点的过程, 即把指示汽车位置的鼠标显示在行驶的道路中央。工作前提是汽车已经行驶在道路上, 电子地图要相对准确, 立交桥上中下三层的变换要作相应的拓朴关系描述 (选择的电子地图比例是25 m, 1∶2500, 制图精度<10 m) , 见图5。
地图匹配技术实际上是借用制导技术中的地图匹配器技术。利用制导技术中的另一种景像匹配技术, 对马路边的建筑物、十字路口的标志物等制成景像数据库进行景像识别, 将实现汽车的门对门的服务。
新近发展起来的模糊逻辑控制的地图匹配技术, 替代了复杂的数字相关匹配电路, 它只需要模糊化、推理机、反模糊化三个过程就把每个传感器的信号和路径指派为0—1的模糊逻辑真值进行决策, 大大地简化了结构, 降低了成本。
有了地图匹配技术、多种传感器数据融合技术组成的推算定位的自律导航以及GPS导航, 实现了汽车在高动态行驶中快速捕获卫星信号的三重精度的汽车导航。
《2.4电子地图数据库》
2.4电子地图数据库
一旦GPS确定了汽车的位置, 地图就是与位置有关的特征提供者。电子地图数据库是定位与导航的参照标准, 我们把纸质地图转化为矢量编码结构的地图, 存储于DVD光盘中, 便于计算机检索。因为矢量编码地图占用存储空间少且存取速度快, 地图数据结构的各要素之间建立的又是隐含关系, 操作灵活, 更能真实地反映地图各要素之间的固有关系, 所以没有采用扫描仪数字化纸质地图。矢量编码地图是基于解析几何的道路网络特征来表示的, 它把真实世界用点、线、面联系起来, 将其相关属性 (包括道路类型、街道名称、地址范围、行驶速度、十字路口状况、联通性、各种标志和转弯限制等等) 用数字形式编译成文件或文件集合, 包含了原始数字制图的数据, 再以数字压缩形式生成一定格式的输出文件, 便于计算机自动处理和快速存取。
如果要跟踪, 还要把存储在电子地图数据库中的各种路径进行路径规划 (route planning) , 然后对车辆进行路径引导 (route guidance) , 即需要向司机实时地提供依次转向的指令 (包括街道名称、行驶距离、路标等) , 把车辆位置作为时间的函数, 不断与路径规划模块提供的最佳路线作比较, 向司机发出信号。这种算法的选择是为了便于和交通信息通信系统 (VICS) 联网, 获得交通道路堵塞信息, 选择最佳行驶路线 (包括最短距离、最少时间、最少收费路口等) , 进行最优化设计和动态实时更新信息, 从而解决交通拥堵问题。一张DVD光盘可以预存4 000万个街道地址, 4 900万个电话号码, 分11+1层处理
电子地图除采用平面地图外, 还可以制成三维立体图或鸟瞰图。这里介绍一种由平面图到鸟瞰图的转换, 它以地面上空300 m高, 汽车后方约1 000 m 设计, 此时, 汽车前方的视野景深可达6 300 m, 上、中、下三段的视野可实现汽车周围360°的了望功能。司机在一张地图上可以看到6 000 m以上的道路信息, 实现由起始点到目的地全貌的一目了然, 见图6。
《图6》

图6 由平面图到鸟瞰图的转换 Fig.6 From plane figure to bird's eye figure change
《2.5其他硬件配置》
2.5其他硬件配置
《2.5.1 LCD液晶显示器 》
2.5.1 LCD液晶显示器
从显示清晰和交通安全角度出发, 汽车导航系统的显示器一般都选用7英寸宽屏幕画面、对角线180 mm、336 960个像素 (234×1 440) 、横纵比为16∶9的薄膜晶体管有源矩阵液晶显示器 (TFT-LCD) 。由于在每个像素后面都配置了一个半导体开关器件来驱动, 从而实现了高亮度视频显示。16∶9宽屏幕画面在增加AD转换芯片和PIP处理芯片后, 可提供左右或上下双画面、画中画、九通道画面以及竖立起来纵向长距离扩大画面显示, 清晰地显示出检索到的最优化选择的3条乃至8条路线, 符合交通安全要求。
在线路上, 利用GPS给出的当地坐标, 通过天文年历查出当地的日出日落时间, 然后用它自动控制系统的白天、黑夜显示。在结构上设计成自动伸缩型。
《2.5.2 DVD-ROM驱动器 》
2.5.2 DVD-ROM驱动器
我们选用单面双层DVD光盘, 其容量为8.5 GB, 相当于14张CD-ROM光盘, 可储存4 000万个街道名称, 4 900万个电话号码, 或者储存290座100万以上人口城市的三维坐标多媒体地理信息
选择DVD光盘是因为它具有高密度海量数据的存取, 光盘是无接触读取数据, 能延长数据存取的寿命, 少量灰尘不影响回放质量, 数据传输速度快, 图像分辨率高, 回放时间长, 每个字节成本低, 特别适用于汽车导航系统。
光驱的结构采用电子防震系统和双门防尘措施, 以满足汽车高速行驶的要求。
《2.5.3 关于CPU的选择 》
2.5.3 关于CPU的选择
为提高行车路径的规划和路径引导, 加速自律导航中各种传感器数据融合算法的运算, 满足汽车在快速行驶中实时处理道路上发生的突发事件, 以及提高最佳行车路线的检索速度, 一般要求在一个画面上同时检索并显示出3条乃至8条最佳到达目的地的路线供选择, 所以汽车导航系统都要搭载32 bit的RISC (精简指令集运算) CPU。车速为40 km/h定义为交通堵塞。汽车导航系统各部件在汽车上的安装示意图见图7。
《图7》

图7 汽车导航系统各部件安装示意图 Fig.7 Install sketch map of car navigation system
《3 结束语》
3 结束语
中国是发展中国家应用GPS最早的国家, 然而GPS应用设备的标准、导航软件标准和定位导航统一规范, 都还没有建立起来。现在通常使用的硬件为INTEL公司的奔腾系列, 软件是微软公司的WINDOWS CE, 两者简称为WINTEL平台。采用人家的平台就要受人控制, 而且WINDOWS CE又有许多缺点, 比如它的模式呆板生硬, 占用的驻留空间内存大约2 MB左右, 功耗大, 不适于便携式, 而且没有实时操作功能, 实际应用中须作增删改进。所以只有发展自己的平台, 才能独立自主地开创自己的信息产业。有人误认为计算机产业就是高科技, 实际上它只是一种劳动密集型的组装产业, 属低科技水平。
当务之急是, 我们应该建立自己的导航标准, 独立开发适合我国国情的具有自主知识产权的平台, 才能把市场做大。











 京公网安备 11010502051620号
京公网安备 11010502051620号




