



《1 动力气垫地效翼船的空气-流体动力设计特点和难点》
1 动力气垫地效翼船的空气-流体动力设计特点和难点
如文献[1~4]所述, 动力气垫地效翼船 (又名两栖地效翼船) 与一般船相比, 具有超高速性、耐波性、两栖性、可登陆性及多航态运行等特点, 由此给气动布局带来一系列问题, 给设计带来极大难度。本文着重分析在流体空气动力学设计 (气动布局) 方面的特点和难点。
《1.1 静垫升性》
1.1 静垫升性
如同全垫升气垫船一样, 动力气垫地效翼船必需具有两栖性与陆上机动能力。但是正如图1、2、3所示, 动力气垫地效翼船在首尾部并没有像全垫升气垫船那样的围裙*, 首尾没有围裙的“天鹅”号 (代号“751”) 动力气垫地效翼船从正面看来仅有狭窄的主船体和两个侧浮体, 犹如三把刀形浮体, 在波浪中即使偶尔擦水也仅有较小的附加阻力, 使艇的失速很小。
如同所有气垫船专家所意识到的那样, 大门敞开的首部对静垫升带来了极大的困难。因此提高地效翼船的静升推比ηLS是一个关键。
《1.2 多航态运行》
1.2 多航态运行
为了使艇能用于军民领域, 即能在普通地面上陆、下水、进山洞, 在狭窄航道上机动、靠船帮与码头, 以及在风浪中高速飞行, 艇必需具备如下航行模式:a.陆上静垫升, 低中速航行;b.水上低速排水航行;c.水上中速 (气) 垫态航行;d.地效区内水上高速离水飞行。
众所周知, 艇的重心一般是不变的, 但是水 (地) 面对船的空气流体的支持力中心是随航态而变化的, 作用在地效翼上的流体空气动力支持力一般有:a.静垫升力 (艇在水面或地面上静垫升时的支持力) ;b.主船体与侧浮体的阿基米得浮力 (艇在水上排水航行时) ;c.主船体与侧浮体的水动升力 (艇在水上中速航行时) ;d.主翼与水平尾翼、组合翼等的动力 (气垫) 升力 (艇在水上或陆上中速垫态航行时) ;e.主翼与水平尾翼、组合翼等的气动升力 (艇在水上或陆上高速飞行时) 。
因此空气-流体作用力中心归纳起来有船体的静 (动) 流体作用力中心、主翼 (包括主船体与浮体) 的气垫压力中心和主翼与船体的气动力中心。虽然船体与浮体的静 (动) 浮力如与重心在纵向不一致时仅带来船舶一定的纵倾, 且纵倾不太大时不致于带来过大的危害;但如重心与气垫压力中心在纵向不一致时将使艇一端触地而无法在陆上静垫升机动、上陆与下水;而重心与气动力中心的不一致将导致船失稳甚至倾覆。前苏联三次实船倾覆与“天鹅”号船模数次大纵倾角险情即为很好的例证。
一般说来, 如不精心设计, 气动中心很难与气垫中心在纵向吻合。总之, 气 (流体) 动力在各种航态下的配平已成为设计上的一大难点。
《1.3 高速纵向稳定性》
1.3 高速纵向稳定性
地效翼船在地效区飞行时横向稳定性固然不成问题, 但是如果气动布局不当将恶化艇的纵向稳定性, 尤其是仰角焦点 (XFα) 、高度位置焦点 (XFh) 和重心XG位置对艇的纵向稳定性及其在风浪中的抗干扰能力具有十分重要的意义。难处是它不像其他高性能船有章 (或规范、指导性文件) 可循, 船模的尺度效应又比较大, 故设计中判断艇的飞行稳定性和选择XFα、XFh是颇为棘手的, 弄不好不是导致机毁人亡, 就是在风浪中运动剧烈。
《1.4 升阻比》
1.4 升阻比
虽然艇在地效区运行有较好的升阻比, 但是它不像飞机表面那样光滑规则, 它的外形比较复杂, 又有突出部, 如前置导管轴系及其支架和管路、侧浮体等, 而且机翼的展弦比较小, 各国地效翼船在地效区动作时, 机翼的理论升阻比虽可高达20或以上, 但整机的升阻比往往在15左右或以下。因此提高地效翼船的升阻比是一个重要课题。
《1.5 推力恢复系数》
1.5 推力恢复系数
前置导管推力器在中低速时起着垫升机作用, 在高速运行时则起着推进器的作用。因此前置导管螺旋桨的设计、安装位置及其导流片设计十分重要, 它不仅应使艇具有较高的静升推比ηLS, 而且在高速时应该有较高的动推力恢复系数ηTd, ηTd=Td/Tdo, Td为高速航行时前置导管螺旋桨在艇上的推力, Tdo为单独导管桨的动推力。ηTd是至关重要的系数, 有时螺旋桨虽有很高的效率, 但ηTd太低, 有效推力将很小。
《2“天鹅”号地效翼船空气-流体动》
2“天鹅”号地效翼船空气-流体动
《2.1 静垫升性研究》
2.1 静垫升性研究
静垫升至关重要, 它直接影响以下性能:a.两栖性;b.可登陆性;c.艇的阻力峰、起飞性能和垫态机动性;d.风浪中起飞性能, 抨击、船体运动等耐波性能。因此对静垫升必须予以重视。一般来说, 艇如在陆地上有好的静垫升能力, 则下水起飞等运动性能将不成问题。
如何推导艇的静垫升解析式?早在20世纪70年代美国海军研究中心 (泰勒水池) 就提出著名的克拉乌斯-高林登理论, 以用于动力增升地效翼船[6]。该理论假设:a.前置导管推力器喷出的射流均匀分布于翼展;b.考虑气流喷射出来后的引射原理, 即与周围气流进行湍流混合;c.艇的基面并未离地, 部分射流经尾部间隙逸出, 部分气流流向翼上部由首部逸出。
此理论广泛用于国外动力增升地效翼船并可直接求得静垫升升力与阻力。但此理论有如下考虑不周之处, 且用在动力气垫地效翼船 (即两栖地效翼船) 上不太适合:a.射流气流均匀分布于翼展, 且认为单位翼展升力与翼展无关, 显然与事实不符;b.未考虑翼背可安达效应;c.尾部襟翼有开启高度t2而周边无逸流, 这显然与两栖地效翼船的流体动力模型相违背;d.未考虑主船体与侧浮体对升力的作用;e.未充分考虑首部大开口对气垫升力的影响等。
为此中国船舶及海洋工程设计研究院 (以下简称MARIC) 从1994年起再次开展地效翼船的静垫升研究:从半船模开始, 进行了十余个半船模风洞试验;采用不同的主翼展弦比、翼型参数、主船体和侧浮体的线型、襟翼形式、导流片形式与参数、前置导管桨的形式及其相对位置等进行试验, 然后进行最佳组合。在此基础上, 再制造若干个整船模型。
从风洞试验与固体壁面上的测压与静垫升试验 (图4) 中发现, 气垫内部的压力分布与气垫船相似, 为均匀分布。由此可见其静力气垫形成的机理和全垫升气垫船基本相似, 其静升推比和飞高有着密切的关系:飞高越大, 流量Q越大, 气垫压力pc将迅速下降, 升力及静升推比也急剧下降。
经过不断改进, “天鹅”号地效翼船的静升推比ηLS大幅度提高, 见表1。由于静垫升能力的大大提高, 保证了艇的各项总体性能在实船试验时一次成功。
《2.2 起飞后的快速性》
2.2 起飞后的快速性
船起飞后水阻力已基本为零, 因此完全可以从风洞试验中求得最佳参数组合。与上述静垫升特性一样, 先在多个半船模风洞试验基础上进行筛选, 以获取最佳的主翼配置和展弦比、主翼、冲角、襟翼、组合翼、导流片、侧浮体、端板型式等。
主要判别系数为Cy、Cx、ηLd、ηTS、ηTd、Xdc、K1、K2等与h、n、γ、θ、β的关系。
经过反复试验, 升阻比提高约30%, 从而保证了艇的快速性。
《表1》
表1 各船模的ηLS比较 (ηLS/ηLS.750)
Table 1ηLSComparison of three DACWIG models

《2.3 起飞前后的阻力》
2.3 起飞前后的阻力
起飞前有时具有两个阻力峰:前阻力峰为艇滑行兴波引起的阻力峰, 后阻力峰为艇虽已大部分离水, 仅尾部擦水, 但由于此时航速较高、飞溅阻力较大, 形成为阻力峰。因此无论水上飞机、地效翼船等对起飞性能均十分重视。为了改善起飞性能一般采取的措施有:a.船体滑行面的断级;b.加装起飞水翼;c.气垫起飞。我们采用气垫起飞。
为了研究艇在垫态航行和离水飞行时在水面上的阻力特性与耐波性, MARIC与俄罗斯的克雷洛夫研究院 (KSRI) 合作, 由MARIC供图, 在KSRI进行船模加工以及静水与波浪中的拖曳试验;改变各种参数如襟翼角、导流片角、水平舵角与重心位置等进行阻力与运动特性试验。从试验可知此型艇的阻力峰并不大, 一般在排水量傅氏数FrD≈5时即能起飞。
从试验看出动力气垫地效翼船在阻力峰时的升阻比高达6或以上。图5为俄罗斯的有动力增升和无动力增升时地效翼船的阻力峰比较[5]。“天鹅”号地效翼船在阻力峰时的升阻比高达6以上无疑是在总体性能上的一个较大突破。
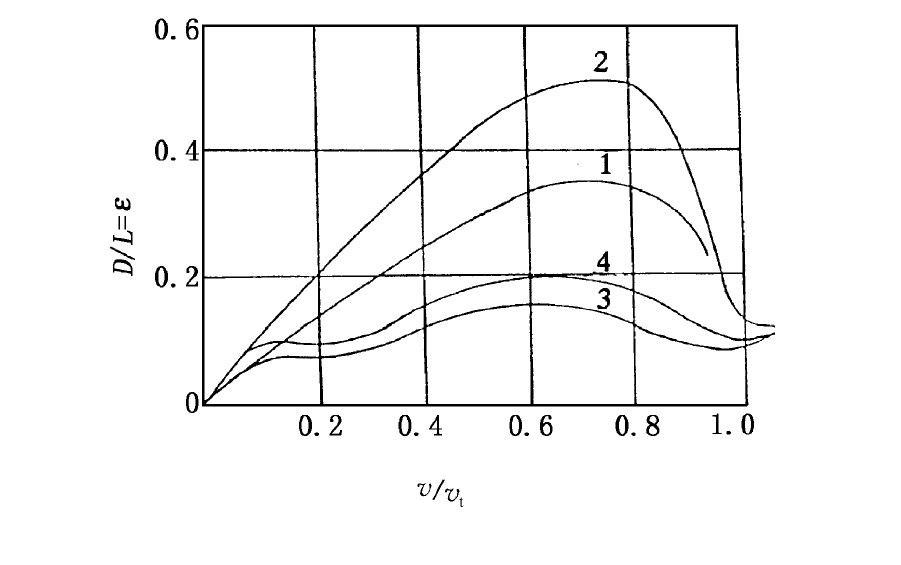
图5 有、无动力增升时地效翼船阻力峰
Fig.5 WIG drag hump with power-augment or not
D—阻力;L—升力;v—航速;vt—起飞速度1.静水, 无动力增升;2.横浪, 无动力增升;3.静水, 有动力增升;4.横浪, 有动力增升
《2.4 耐波性》
2.4 耐波性
标征船耐波性的优劣可以从四个方面分析:风浪中的起飞性能与风浪中的附加阻力;风浪中的失速;风浪中运行时船底遭受的水抨击压力与艇体的过载加速度;风浪中运行时艇的运动, 即纵横倾、升沉的加速度与幅值。
1) 风浪中的阻力峰与起飞“天鹅”号地效翼船船模在KSRI拖曳水池中进行了规则逆浪与顺浪、长浪与短浪的阻力与静水阻力对比试验, 结果表明:
a.无论在逆浪或顺浪, 长浪或短浪, 由于存在气垫, 实际一次阻力峰与静水时差别不大。
b.在二次阻力峰方面 (起飞时由水花飞溅阻力引起) , 显然在波浪中的阻力将加大, 尤其在长随浪时 (相对波长λ/C=3.5, λ为波长) , 但在短浪时要小得多。如此小艇在沿海的遭遇机会并不多, 而在短逆浪中情况将有改善。
c.更为重要的是在水池试验时并未考虑风速, 如考虑风速则在逆风起飞时将大为改善, 尤其是在二次阻力峰时傅氏数已经较大, 再加上风速将使主翼产生更大的升力。“天鹅”号地效翼船与“750”地效翼船在淀山湖的逆风起飞试验充分证明了这一情况。
因此在恶劣气象下运行时船长往往采用逆风起飞, 起飞后再按预定航向运行。
2) 风浪中的失速当动力气垫地效翼船离水飞行时, 波浪的附加阻力极小, 只需计及风的附加阻力 (在逆风时) , 而由于船的航速很高, 故风速影响很小
3) 风浪中运行时的冲击加速度在KSRI试验时得出如下结论:水动力冲击加速度远远小于其他高速船 (如滑行艇、气垫船与水翼艇) ;在船模所有航速下在重心处的垂向加速度, 随浪时<0.3g (g为重力加速度, g≈9.81 m/s2, 下同) , 逆浪时<0.63 g, 而首部冲击加速度则在所有航速下无论逆浪与顺浪均<0.4 g, 只有在极个别情况下才例外。这可能是极强气垫作用带来的后果。
4) 波浪中的运动和运动加速度“天鹅”号地效翼船船模在静水与逆顺浪中的相对吃水 (即飞高) 比较:波浪中包括长浪 (λ/C=3.5) 与短浪 (λ/C=1.75) 两种情况, 由试验可知无论长浪或短浪, 与静水相比, 其相对吃水均比较接近。
由波浪试验可知, “天鹅”号地效翼船船模随遭遇频率而变化的相对升沉幅值ΔY=Δy/hw (其中:Δy为升沉幅值, hw为波高) 与纵摇角Δα°幅值均较小, 尤其在高速时, 其幅值更小, 呈平台航行, (在“750”船上也得到证实, “750”实船在hw=0.5~0.7 m、风力4~5级下在淀山湖试航记录的纵摇幅值为0.3°, 横摇幅值为0.52°, 垂向升沉加速度为0.2 g) , 即使在共振升沉纵摇时其幅值也较小。
5) 配平与纵向稳定性的保证地效翼船的配平始终是一个比较棘手的问题, 其原因为艇有多种运行状态, 而在各种航行状态下其作用力的合力中心也在变化, 很难与重心吻合。
在排水航行时浮力中心的纵向位置与重心不吻合而产生某些纵倾角不致于造成太多困难, 但在陆上或水上高速航行时其重心和气垫压力中心或气动中心不一致将造成配平的困难。如果仰角焦点和高度位置焦点配置不当, 有可能在高速飞行时造成剧烈运动甚至有倾覆的危险。
过去有的两栖地效翼船 (如“750”) 是采取三心合一的办法, 即重心、气垫中心和气动中心在任何航速下在纵向始终处于同一位置。在这种情况下重心始终不能变化, 因此只能适用于试验艇。为此MARIC采取了一系列的措施, 例如配置了一些配平机构 (前置导管螺旋桨后的导流片、襟翼、高平尾翼及其水平舵等) , 并进行多方案比较分析, 通过风洞中的自由飞试验取得定性比较, 然后采用无线电遥控模型的自由放飞试验取得了满意的结果。
这些试验结果显示出艇能得到足够的纵横向稳定性, 证明艇的气动布局是合理的。
《3“天鹅”号实船试验》
3“天鹅”号实船试验
在淀山湖进行一年多的实船试验表明[2]:
1) 艇具有良好的静垫升性和满意的静垫升高度, 能在陆地上自由移动, 在登陆场地很小的情况下自行下水与上陆, 也可籍人力拖曳原地调头;
2) 艇在淀山湖的浅水场地能很快越峰与起飞, 起飞时的水花颗粒较全垫升气垫船细小, 起飞距离与时间也较短;
3) 艇的最大航速超过130 km/h, 由于湖面太小, 故飞到对岸时艇尚处于加速状态;
4) 艇在各种航速下与船模试验一样有稳定的航行状态, 说明气动配平、仰角与高度焦点的配置是适当的;
5) 由于各种原因海上试验尚未进行, 实船耐波性尚待试验证实。
《4 缺点和有待改进之处》
4 缺点和有待改进之处
“天鹅”号的研制见参考文献[7]。这里主要归纳“天鹅”号的空气与流体动力性能方面存在的缺点、具有的潜力与有待改进之处:
1) 艇的外形 (主要是主船体和浮体) 设计有待改进, 以减小艇在高航速时的阻力;
2) 主翼的翼型与安装也可进一步改进, 使艇的静升推比与高速气动力品质进一步改善;
3) 艇的主船体和浮体线型及其下部着陆装置有待改进, 以便进一步提高两栖性、可登陆性、高速性耐波性与起飞性能
4) 如能选用尺寸较小的燃气轮机, 则垫升主机与轴系可望有较大的改进, 以大大改善艇的空气垫力性能。
总之, 提高“天鹅”号动力气动地效翼船的性能, 包括两栖性、耐波性与高速性, 尚有较大的潜力











 京公网安备 11010502051620号
京公网安备 11010502051620号




