
1 导航卫星时间同步的意义和现状
现代卫星导航系统GPS (global positioning system) , GLONASS (global navigation satellite system) 均采用伪距定位原理。用户观测至4颗卫星的伪距, 在已知卫星钟差和位置的条件下, 解算用户的位置坐标, 定位方程为
![]()
其中X, Y, Z为用户在地球坐标系中的三维坐标值, Xj, Yj, Zj为卫星在同一坐标系中的三维坐标值, Ri为用户至卫星间的空间距离, 由用户通过对卫星的观测伪距获得, 其表达式为
![]()
其中ρj为用户测得至卫星的观测伪距, c为光速, ΔtSj为卫星钟面时相对于导航系统的时间偏差, Δtu为用户钟面时相对于导航系统的时间偏差, Δtu-ΔtSj为用户钟与卫星钟之钟差, ΔtDj为传播附加时延和其他误差。图1为伪距测量示意图
《图1 伪距示意图》
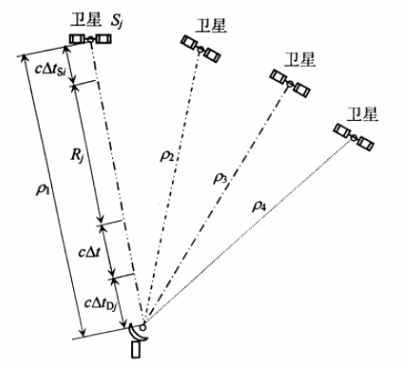
图1 伪距示意图
Fig.1 Pseudo range theorem view
式 (1) 的定位原理在于各个卫星按独立的钟面时发射导航信号, 用户按自己独立的钟面时进行至各颗卫星的伪距测量。ΔtSj由运控系统完成测量, 通过卫星导航电文向用户广播。完成导航卫星钟面时与导航系统时差的测量与计算方法称为导航卫星时间同步技术。导航卫星时间同步误差直接关系到用户定位精度, 是卫星导航的关键技术。在GPS系统中采用两种方法完成时间同步, 一种是倒定位法, 另一种是通过星间链路完成卫星间的时间同步。
倒定位法的基本原理。4个地面时间同步站同时接收某卫星的导航信号, 获得4个伪距观测值, 形成与式 (1) 、式 (2) 类似的观测方程, 在时间同步站位置及时间同步站与导航系统时间偏差已知的条件下, 求出卫星的位置坐标和卫星相对于导航系统时钟差。该方法得到的时间同步精度与各时间站间的同步精度关系极大。在缺乏地球静止轨道卫星参与双向时间同步的前提下, 其精度不高, 当采用地球静止轨道卫星双向时间同步后其精度较高。其误差分配如下:
1) 站间同步误差mf=2 ns,
2) 电离层误差mion=3 ns,
3) 对流层误差mtro=0.6 ns,
4) 地面同步站坐标误差mx=0.3 ns,
5) 测量误差mR=1 ns,
6) 多径误差mw=0.3 ns。
总等效距离误差为

考虑卫星与站间的几何图形, 取TDOP=2~4, 卫星钟与地面系统时间的误差为12.88~25.76 ns。据工程实际介绍, 一般优于18 ns。
星间链路时间同步方法的原理是:卫星间由发射和接收设备建立一条信号链路。通过卫星双方均接收对方发射的测距信号, 完成相互间的伪距测量, 当星间粗同步差由于卫星间相对运动产生的距离误差可以忽略不计时, 两个伪距差除以光速c即为星间钟差。其同步精度可优于2 ns, 且不依赖地面系统的介入, 具有星间自维持特性。但是, 星间链路代价高, 用UHF频段建立星间链路, 其功率放大器的发射功率将超过300 W, 加重了卫星的功耗和重量。用微波以上频段建立的星间链路, 其天线跟踪指向复杂, 结构庞大。正在建设的伽利略系统为降低卫星成本, 不打算采用星间链路。
俄罗斯的GLONASS采用雷达同步技术, 由地面C波段发射上行信号, 经卫星转发器应答获得星地间距离, 与地面观测的伪距一起解算星地钟差。这种方法, 同步精度与轨道精度相互关联。精度在10~20 ns。
2 伪距双向时间同步理论
伪距双向时间同步的工程理论是基于星地或星间两站之间信号传播路径完全相同, 那么两站钟差即为所测量的伪距之差除以光速c, 或为两站检测相应时标的时刻之差。其过程是, 两站A, B均在本地钟控制下以各自独立的钟面时发射信号, 各站接收机收到对方发射的信号后, 完成与本地钟间的伪距测量。设A站的钟面时为tA, B站的钟面时为tB, 两站的钟差为
![]()
两站所测得的伪距测量值ρA, ρB为:

其中tAr为A站接收B站信号时刻, tBr为B站接收A站信号时刻, ctAD为B站至A站的传播附加等效距离误差, ctBD为A站至B站的传播附加等效距离误差。
根据式 (2) 对伪距的定义, 扩展至任意两站间的通用表达式为

R0为两站间的空间真距离。由于传播路径相同。使用的信号频率相同, 有
![]()
将式 (6) 、式 (7) 分别代入式 (4) 、式 (5) , 然后式 (4) 减去式 (5) 有
![]()
式 (9) 表明, 两站间的钟差, 可用事件计时器来实现。tAr和tBr分别为A站B站接收双方时间标志的时刻, 它们的差即为两站的钟差。
3 伪距时间同步方法
根据建立的伪距时间同步理论, 找到满足该理论条件, 或经修正后满足额定精度要求。那么这些条件及修正算法就是伪距时间同步的方法。
星间伪距时间同步方法就是基于A, B两卫星以相同的信号积累方法和伪距测量方案确保两站相对运动引起的时间偏差基本抵消的基础上的。注意, 为满足相对运动两站空间距离不变, 那么他们应在相同的时刻进行伪距测量。这是确保精度的关键技术。根据上述思路, 可以概括出具有工程价值的时间同步方法:
1) 双向无线电伪距同步方法 (TWRPr, two ways radio pseudo range) ;
2) 星地双向激光伪距同步方法 (TWLPr, two ways laser pseudo range) ;
3) 双向卫星中继无线电伪距同步方法 (TWSrPr, two ways satellite-relay pseudo range) ;
4) 双向地球站中继无线电伪距同步方法 (TWErP, two ways Earth-relay pseudo range) 。
4 双向无线电伪距同步
双向无线电伪距同步的基本方法是, 需要同步的A, B 两站同时发送频率相同或相近的两路测距信号, A, B两站分别接收对方的测距信号并完成伪距测量。按式 (4) 至式 (9) 完成两站时差测量。
《4.1码分多址双向无线电伪距同步》
4.1码分多址双向无线电伪距同步
码分多址 (CDMA) 双向无线电伪距同步是A, B两站使用相同的频率, 以码分多址识别方式实现两路信号的调制和识别。传输路径上的附加时延完全相同而抵消。其关键技术是实现A, B两站伪距的同步测量, 使伪距测量时刻tjPR的同步偏差产生的空间路径偏差可以忽略不计。
卫星间时间同步方案应着重考虑两站间相对位置变化在各自伪距获得时刻tjPR的同步偏差ΔtjPR的要求。
![]()
其中tjPR为卫星j (或A站) 伪距获得时刻, t
当A, B两站发射信号采用同一时间系统时刻标志 (如1PPS) 时, ΔtjPR为A, B两站时间系统粗同步误差, 即在采用CDMA双向无线电伪距同步方法时, A, B两站应具备的初始同步精度, 或粗同步精度。设要求的同步精度ΔtABP=1 ns, 当用于中圆轨道 (MEO) 卫星双向同步时, 粗同步偏差ΔtjPR=0.187 5 ms。当用于MEO卫星与地球站时间同步时, 最大时间偏差ΔtjPR可放宽至0.375 ms。可见, 粗同步精度是容易达到的。
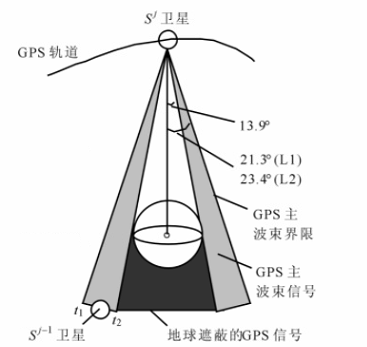
导航卫星间CDMA双向时间同步的理想方案是在卫星上安装导航接收机, 对另一颗星的导航信号进行伪距测量。其原理如图2所示。即
在卫星Sj-1, Sj对地面直接安装导航接收天线, 实现对Sj, Sj-1分星发射信号的伪距测量。以GPS卫星为例
该方法的优点之一是直接利用导航信号进行双向时间比对, 时间同步参考点与导航信号参考点在同一发射天线相位中心, 无附加时延。第二个优点是使用相同频率, 在近乎相同时刻进行双向比对, 其空间传输误差相同。所以时间同步精度几乎仅与测量误差有关, 可达1 ns。且无附加发射设备, 整体效益好, 但工程难度极大。
4.2频分多址双向无线电伪距同步
频分多址 (FDMA) 双向无线电伪距同步是两站各发射一个频率相近的测距信号, 既做到A, B站上发射信号与接收信号的频率分割, 又使其通过电离层传输的附加时延偏差为最小, 这种方法适用于卫星与地球站间的时间同步。利于卫星发射的导航信号和地面上行注入信号完成双向时间同步测量, 当发射频率分别为FN=1 268 MHz, Fu=1 340 MHz时, 以传输路径上总电子含量TEC为典型值1×1018 m2为例, 按
![]()
分别计算下行与上行的电离层附加时延分别为
![]()
上下行时延差为8.73 ns。然后利用导航系统提供的电离层校正参数分别进行校正后的残差为30%, 由电离层引起的传输误差为2.6 ns。该方法的星地时间同步误差分配如下:
mion为电离层误差2.6 ns,
mtro为对流层误差0.6 ns,
mR为测量系统误差2.6 ns。
总误差为 mPF=mion+mtro+mR=4.2 ns。
如果增加下行频率F3=1 561 MHz的伪距测量值, 同时对上下行伪距测量值进行电离层传播时延校正, 几乎可以完全消除因频率不同造成的传播时延影响。星地钟差地面对接试验表明, 误差为0.42 ns (RMS) 。
5 星地双向激光伪距同步
双向激光伪距同步的原理与双向无线电伪距同步法相似。用于星地系统时间同步。只不过是地球站发射激光测距信号, 卫星站的发射信号由星载反射镜产生。由于激光在电离层的传输时延极小, 测量精度可达0.01 ns。所以总的时间同步测量精度可达0.1ns量级。但必须对地球自转产生的两个信号路径差进行精确改正。否则可产生70 m量级的路径差。
6 双向卫星中继无线电伪距同步
双向卫星中继无线电伪距同步是利用地球静止轨道 (GEO) 卫星转发器实现地球站间时间同步的先进方法。传输路径如图3所示。为降低上下行信号在电离层的传播误差, 以利用Ku频段转发器为佳, 当载波频率分别为fUA=fUB=20 GHz, fDA=fDB=18 GHz。
《图3 双向卫星中继无线电伪距同步路径示意图 》
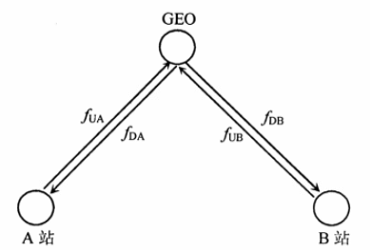
Fig.3 Two ways satellite relay pseudo orange time synchronization
根据式 (11) , 计算上下行附加总时延分别为0.34 ns和0.41 ns, 总时延差为0.1 ns。
如果采用上行6 GHz下行4 GHz的C频段工作, 上下行时延差为4.67 ns, 经系统校正后可达2~3 ns。在中国陆地三站观测试验表明, 精度优于1.75 ns (RMS) 。
7 双向地球站中继无线电伪距同步
双向地球站中继无线电伪距同步方法是利用地球站时间同步多波束收发再生系统直接实现卫星间的时间同步, 从而降低星间直接同步的难度和星上负担。其原理如图4所示。
《图4 地球站中继时间同步》
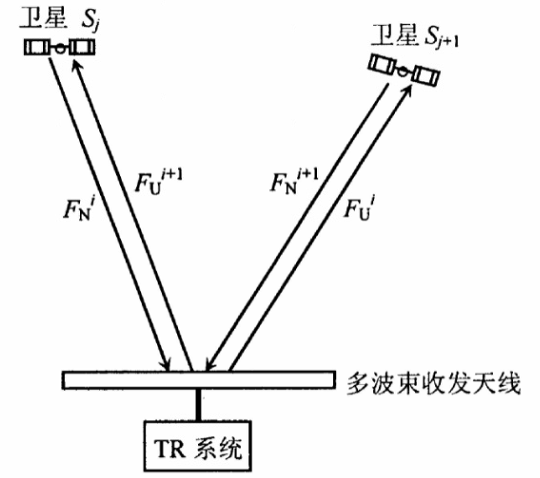
图4 地球站中继时间同步
Fig.4 TWErP time synchronization
地球中继站接收到卫星导航信号后, 延迟固定时间段Δtg后发射上行信号Fu。卫星Si接收Si+1经地球转发的Fi+1u信号, 进行伪距测量, 测得伪距ρi。
卫星Si+1接收Si经地球站转发的F
两卫星钟在满足必要粗同步条件下的钟差表达式为
![]()
Δtgs为地球自转使收发信号时延Δtg产生的路径误差, 可以精确改正。
当测距信号中包含有另一卫星的伪距测量信息时, 两卫星钟的钟差可以在卫星上直接求解。
这种方法与由地球站分别进行双向星地无线电伪距时间同步方法相比, 省去了地面高精度原子钟的授时及守时设备。适合境外 (洲际) 地球中继站的星间时间同步。一个具有6个收发波束的中继系统, 可同时完成6颗卫星与一颗指定卫星的时间同步。其时间同步精度与星地双向无线电伪距时间同步基本相当。如果在南极建一个时间中继站, 每12 h均可对星座内的卫星作一次时间同步, 其观测时间可长达3~4 h。
8 双向伪距时间同步的贡献
1) 利用双向无线电伪距同步方法实现星地、星间时间同步, 其精度达1.0 ns。
2) 利用双向激光伪距同步方法精密测定卫星原子钟稳定性, 其性能复现精度可达0.1ns, 并可用于对双向无线电伪距同步精度的检测。
3) 利用卫星中继双向时间同步方法实现地球站间时间同步。当采用Ku 波段时, 精度可达1ns。
4) 利用地球站中继的双向无线电伪距同步, 可以直接实现星间时间同步。
上述4种方法综合应用, 可十分经济地解决星间时间同步, 与星间直接链路相比, 大大降低卫星的复杂度, 从而降低卫星总重量和总功率。
参考文献
[1] 帕金森B W, 等编著.导航卫星全球定位系统[M].曲广吉, 佘明生, 赵正才, 等译.北京:测绘出版社, 1983.7
[2] Parkinson B W, Spilker J J, .Axelred Tr P, 等.GPS理论与应用第一卷 (上) [M].吴晓进, 谢洪华, 刘乾富, 等译.西安:西安导航技术研究所, 1999.6











 京公网安备 11010502051620号
京公网安备 11010502051620号




