





《1 引言》
1 引言
船舶避碰决策主要是由航海人员依据海上避碰规则[1]及航海经验, 经过观测、分析、推理和判断等一系列智能活动完成的。开发集自动化、智能化于一体的避碰决策系统, 将使舰船避碰系统上一个新的台阶。
这里开发的航海智能避碰专家系统 (Navigation Intelligence Collision Prevention Expert Sytem简称NICPES) 集专家系统技术、智能决策技术、模糊技术及神经网络技术于一体, 是一种新型的航海避碰智能系统[2,3]。
《2 NICPES结构》
2 NICPES结构
NICPES的总体结构见图1。
·数据预处理:对观测数据进行预处理, 解算出目标船的运动参数。
·多元分层知识库:存储以一定形式表示的各种相关避碰知识。
·多路推理机:建立多种推理方法实现知识库查询并控制系统运行。
·数据库:存放初始观测数据、解算结果、推理过程的中间结果及最后方案、结论等。
·解释器:说明系统的推理过程, 对避让方案进行解释。
·学习管理系统:从外部学习新知识, 实现知识库的维护。
·人机接口:实现操作人员与系统各部分之间的信息交互操作。
·避碰参数计算:确定避让幅值及恢复原航向、航速的时间等。
《3 NICPES设计》
3 NICPES设计
《3.1多元分层知识库体系结构》
3.1多元分层知识库体系结构
为了将庞大、复杂的避碰知识“灌输”给NICPES, 基于最佳驱动思想, 建立了一种多元分层知识库体系结构。根据航海避碰领域知识的特点, 对各类知识建立相应的知识库模型, 形成一系列知识元。依据各个知识元之间的关系, 形成了系统的多元分层知识库体系结构, 见图2。
依据多元分层知识库体系结构, 建立相应的多元知识表示法。针对不同知识类型及知识库分类, 选取最适合的知识表示方法, 其中包括:航海示例知识的框架表示法、航海规则的产生式规则表示法、启发性知识和危险度判定知识的过程表示法及船型识别和会遇态势分类知识的神经网络表示法。这不仅使避碰领域大量规则、经验、航海示例及各种相关知识有机地存储在计算机内, 增加了系统的智能水平, 而且由于对各种知识采用了最佳知识表示方法, 使系统维护工作变得简单易行, 提高了运行效率。
《3.2 多路推理机制》
3.2 多路推理机制
人类在解决某一问题时常采取多种思维模式。因此, 为了使NICPES能像专家一样进行“思维”, 提出并建立了一种多路推理机制。针对不同知识表示方式及避碰决策制定过程中不同阶段解决问题的方法不同, 建立相应的推理方法, 系统能够根据运行情况自动选取最佳推理方法, 并能从一种推理方法平滑地转移到另一种推理方法上, 最终求得避让方案。
多路推理机制的关键在于各种推理算法的建立, 图3为系统具有的推理方法。这里, 应用元级推理来实现各种知识库及推理方式的选取。
系统的多种推理方法形式上彼此独立, 功能上相互依存, 一种推理方法求解问题的结果可作为另一种推理方法求解问题的条件。各种推理方法相互配合、协调工作, 共同完成系统总目标。如以航海示例知识库为例, 在求解单船会遇避让方案时, 各种推理方法之间的逻辑关系见图4。
《3.3 避碰领域相关模型》
3.3 避碰领域相关模型
3.3.1 碰撞危险度模型
船舶间碰撞危险是制定避让决策的依据。NICPES建立基于模糊原理的碰撞危险度模型。分别建立会遇最近距离DCPA (Distance of Closest Point of Approach) 、到达最近会遇点的时间TCPA (Predicted Time to Closest Point of Approach) 和两船间距离的隶属函数, 如式 (1) 、 (2) 和 (3) 。其中有关参数 (d1、d2为会遇最近距离区间, t1、t2为到达最近会遇点时间区间, r1、r2为两船距离区间) 的确定和选取上, 综合考虑能见度、会遇态势、船舶操纵性能等因素对碰撞危险的影响。
\(\begin{aligned} \mu\left(D_{\mathrm{CPA}}\right)=&\left\{\begin{array}{ll} 1 & D_{\mathrm{CPA}} \leqslant d_{1} \\ \frac{1}{2}-\frac{1}{2} \sin \left[\frac { \pi } { d _ { 2 } - d _ { 1 } } \left(D_{\mathrm{CPA}}-\right.\right. \\ \left.\left.\frac{d_{1}+d_{2}}{2}\right)\right] & d_{1}<D_{\mathrm{CPA}} \leqslant d_{2} \\ 0 & d_{2}<D_{\mathrm{CPA}} \end{array}\right.\\ \end{aligned}\) (1)
\(\mu\left(T_{\mathrm{CPA}}\right)=\left\{\begin{array}{ll} 1 & T_{\mathrm{CPA}} \leqslant t_{1} \\ \frac{t_{2}-T_{\mathrm{CPA}}}{t_{2}-t_{1}} & t_{1}<T_{\mathrm{CPA}} \leqslant t_{2} \\ 0 & t_{2}<T_{\mathrm{CPA}} \end{array}\right.\\\) (2)
\(\mu(R)=\left\{\begin{array}{ll} 1 & R \leqslant r_{1} \\ \frac{r_{2}-R}{r_{2}-r_{1}} & r_{1}<R \leqslant t_{2} \\ 0 & r_{2}<R \end{array}\right.\\\) (3)
求得DCPA、TCPA及距离R对于碰撞危险度的隶属函数后, 再通过式 (4) 求三个隶属度的加权αD、αT、αR和, 将其作为确定碰撞危险度μ的依据。
\(\mu=\alpha_{\mathrm{D}} \circ \mu\left(D_{\mathrm{CPA}}+\alpha_{\mathrm{T}} \circ \mu\left(T_{\mathrm{CPA}}\right)+\alpha_{\mathrm{R}} \circ \mu(R)\right.\) (4)
仿真试验结果表明:该模型能够正确地反映两船间碰撞危险程度。
3.3.2 避让时机决策模型
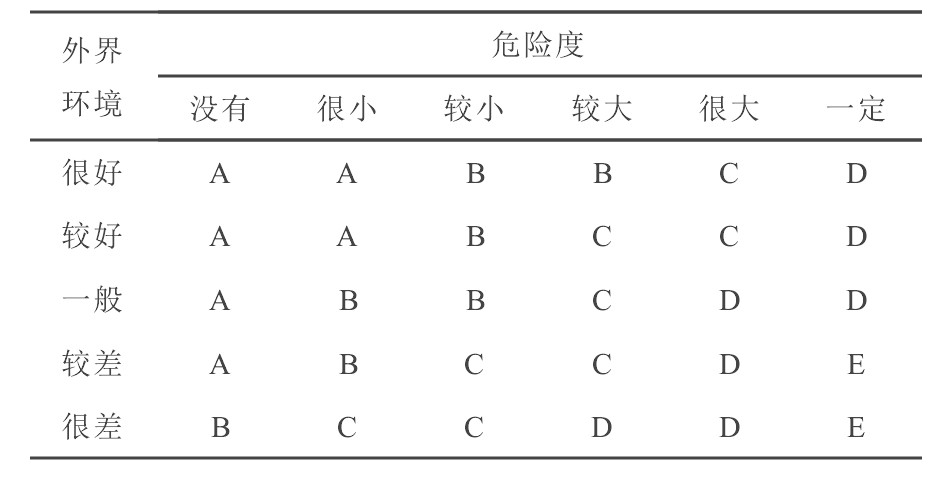
确定避让时机是正确避让决策不可缺少的一部分。建立基于模糊决策表的避让时机决策模型[4], 将避让时机的确定转化为对当前所处避让阶段的分类 (A:判断碰撞危险, B:采取避让行动, C:查核, D:紧迫局面, E:紧迫危险阶段) , 依据航海经验构造避让时机模糊决策表 (见表1) , 建立模糊产生式规则匹配算法, 实现模糊决策表的查询, 完成决策。
模型综合考虑了距离、时间及海域、天气状况等因素, 仿真试验结果表明:该模型对各种情况下避让阶段的划分符合人类判断结果。
3.3.3 会遇态势分类模型
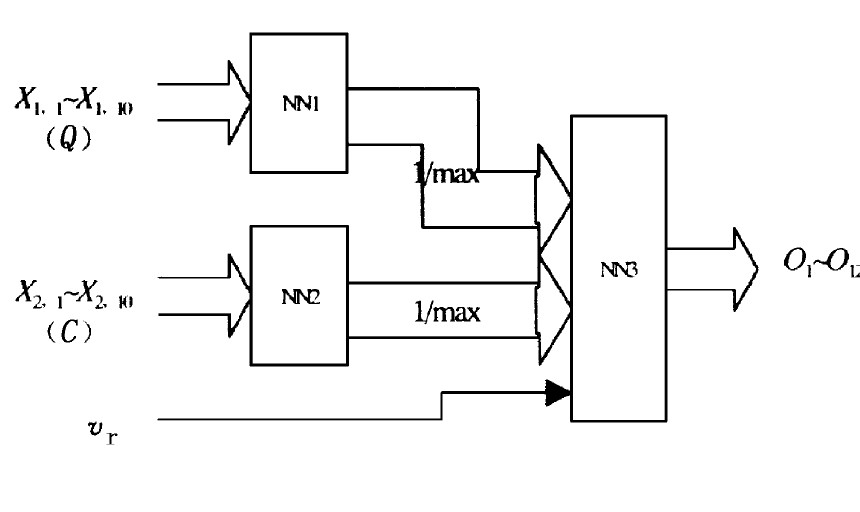
NICPES对会遇态势分类在避碰决策制定过程中所处的地位给予了足够的重视, 建立了基于神经网络的船舶间会遇态势分类模型[5]。模型的多级网络由三个子网构成 (见图5) , 子网NN1和子网NN2分别完成对五组连续输入的舷角值和航向交叉角值分类, 子网NN3完成产生式规则的模糊推理其输出为会遇态势分类结果。每个子网由BP网络实现。
《表1》
表1 避让时机模糊决策表
Table 1 A fuzzy decision table to determine the moment of collision prevention
仿真试验表明:该模型能够对船舶间的各种会遇态势作出正确判断, 对五组连续观测数据进行并行处理, 提高了系统的工作效率。因为不以一次观测数据作为会遇态势分类依据, 使分类结果更为细致、合理。另外, 模型对观测过程中偶尔出现的不正确数据也有较强的容错性。
《3.4 采用层次分析法解决多船避碰问题》
3.4 采用层次分析法解决多船避碰问题
多船会遇时, 人们通常采取的做法是:从各个危险目标船中选取最危险的一个, 对其采用单船避让的方案;该危险局面解除后, 再选取当前情况下最危险的目标船, 直至与所有目标船的危险局面都消失为止。这种方法并不是最佳的解决问题方式, 因此提出并建立了基于层次分析方法 (Analytic Hierarchy Process, 简称AHP) 的多船避碰模型。3.4.1多船避碰模型的层次结构对复杂的多船避碰问题, 形成若干与该问题有关的概念, 如:危险度、会遇态势、规则库及各种避让方案等, 根据这些概念之间的重要性级别、隶属关系, 进行上下分层排列, 形成一个递阶层次结构, 如图6所示。

图6 多船会遇避碰层次结构图
Fig.6 Level structure diagram for multi-ship encountering collision prevention decision making
3.4.2 多船避碰模型的综合算法
1) 建立同一层次各元素关于上一层次某一准则的判断矩阵;
2) 进行层次单排序, 由判断矩阵计算被比较元素对于某一准则的相对权重W (K) (K为层数) ;
3) 一致性检验;
4) 层次总排序, 计算各层元素对系统目标的合成权重P (K) 。
在NICPES中, 取目标船为第一层, 规则库及会遇态势为第二层, 避让方案为第三层, 综合过程如下:
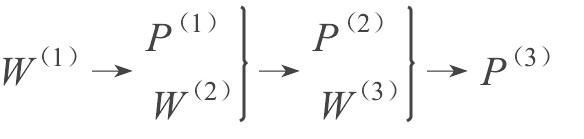
其中:
《3.5 避让参数的多目标最优化解法》
3.5 避让参数的多目标最优化解法
确定单船避让方案参数时, 按照重要性程度由大到小依次考虑:
·转向多大的角度后, 两船间的碰撞危险会减至最小;
·在减小碰撞危险的前提下, 尽量使转向角度最小;
·采取某一转向角度, 航行最少时间后, 恢复原航向、航速。
建立单船会遇下避让参数的多目标最优化数学模型[6]
\( \left\{\begin{array}{l} P_{1}: \min f^{1}(\theta) \\ P_{2}: \min f^{2}(\theta) \\ P_{3}: \min f^{3}(\theta) \\ s . t .\left\{\begin{array}{l} g_{1}(\theta)=\theta-30 \geqslant 0 \\ g_{2}(\theta)=180-\theta \geqslant 0 \\ g_{3}(\theta)=D_{\mathrm{an}}-f^{1}(\theta)>0 \\ g_{4}(\theta)=f^{3}(\theta)-40>0 \end{array}\right. \end{array}\right.\)
式中:决策变量θ为转向角度值;Dan为两船当前碰撞危险度。
目标函数f1 (θ) 为转向θ以后两船间碰撞危险度计算函数;目标函数f2 (θ) =θ;目标函数f3 (θ) 为本船恢复原航向航速的时间计算函数。
约束函数g1 (θ) =θ-30≥0和g2 (θ) =180-θ≥0表示每次转向角度要介于30度至180度之间;约束函数g3 (θ) =Dan-f1 (θ) >0表示要求转向后两船间的碰撞危险度要小于当前碰撞危险度;约束函数g4 (θ) =f3 (θ) -40>0表示恢复原航向、航速的时间限制在40 min内。
《4 航海仿真示例》
4 航海仿真示例
给出两种避让仿真示例, 说明NICPES工作过程及解决问题的能力。
《4.1 示例1》
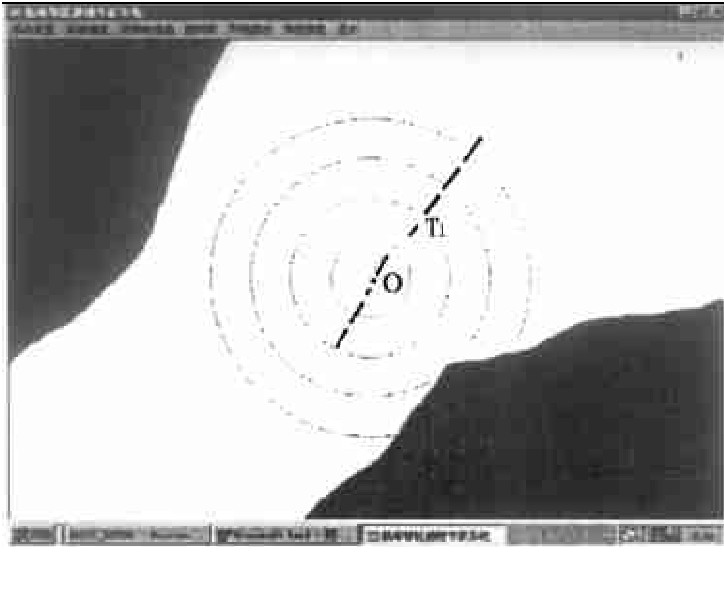
4.1 示例1
·本船初始航向30°, 航速20 kn;目标船T1初始方位40°, 初始距离2 n mile, 航向33°, 航速10 kn。
·本船与目标船T1相距约1.6 n mile时, NICPES推荐避让方案:向右转向71°, 沿新航向航行约6 min后, 恢复原来航向。整个过程见图7、8。
《4.2 示例2》
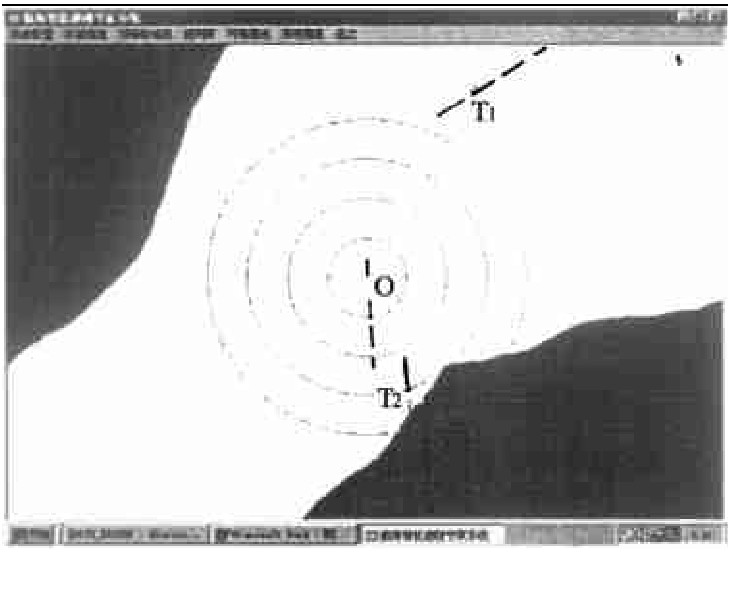
4.2 示例2
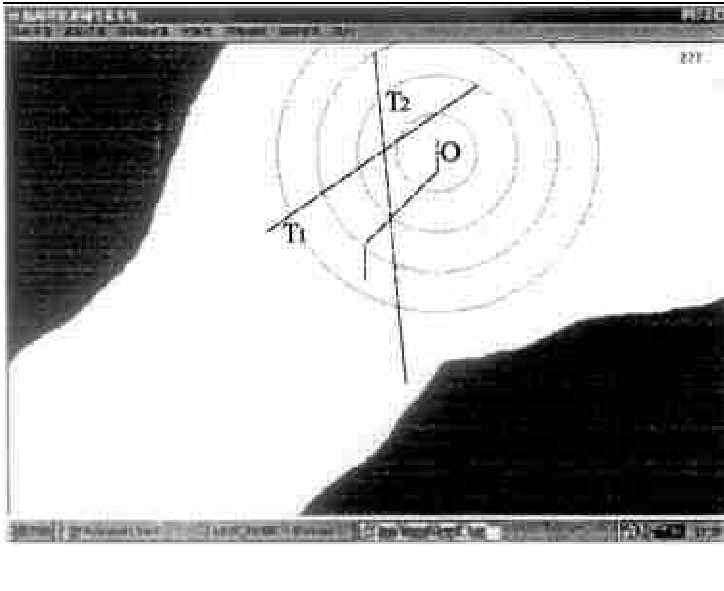
·本船初始航向0°, 航速10 kn;目标船T1初始方位30°, 初始距离5.5 n mile, 航向235°, 航速15 kn;目标船T2初始方位160°, 初始距离3 n mile, 航向355°, 航速20 kn。
·由多船避碰模型得推荐避让方案:“尽早右转”, 最优化方法计算得到最佳转向角度45°和航行时间14 min。整个避让过程见图9、10。
《5 结论》
5 结论
NICPES是一种集专家系统技术、神经网络技术、模糊技术及最优化方法于一体的智能型避碰系统。系统的多元分层知识库体系结构及其多元知识表示, 实现了对模糊数据、模糊描述语言的处理与理解, 避免了传统专家系统的“窄台阶”问题。基于多种推理方法的多路推理机制, 避免了单线推理不充分、效率低等缺点。避碰问题模型的建立, 实现了定性推理与定量计算相结合。基于层次分析法的多船会遇避让方案选取策略, 解决了多船避碰问题。最优化数学模型求最佳避让参数, 使避让方案更加完整。
仿真试验表明:NICPES能对各种会遇情况作出正确判断, 给出有效的避让决策。该系统还有待海上试验进一步完善和实用化。











 京公网安备 11010502051620号
京公网安备 11010502051620号




