


《1 引 言》
1 引 言
在非线性振动系统中, 当系统参数满足一定条件时, 即使在确定性输入下, 输出仍呈现不规则的振动, 称为混沌振动
1996年, 本文第一作者在CVE-1型混沌激振器的基础上, 又研制了CVE-2型混沌激振器, 装于0.75 t轻型混沌振动压路机, 其力学模型与数值仿真见文献
振动压路机是建筑基础施工、水坝、港口、铁路、公路和矿山工程中必不可少的施工设备。由于被压实工料的结构成分异常复杂, 且其物理力学性能具有多样性, 即不同颗粒要在不同的振动加速度下才能达到较好的压实效果, 故用CVE-2型激振器装备重型混沌振动压路机
《2 压路机压实力学模型》
2 压路机压实力学模型
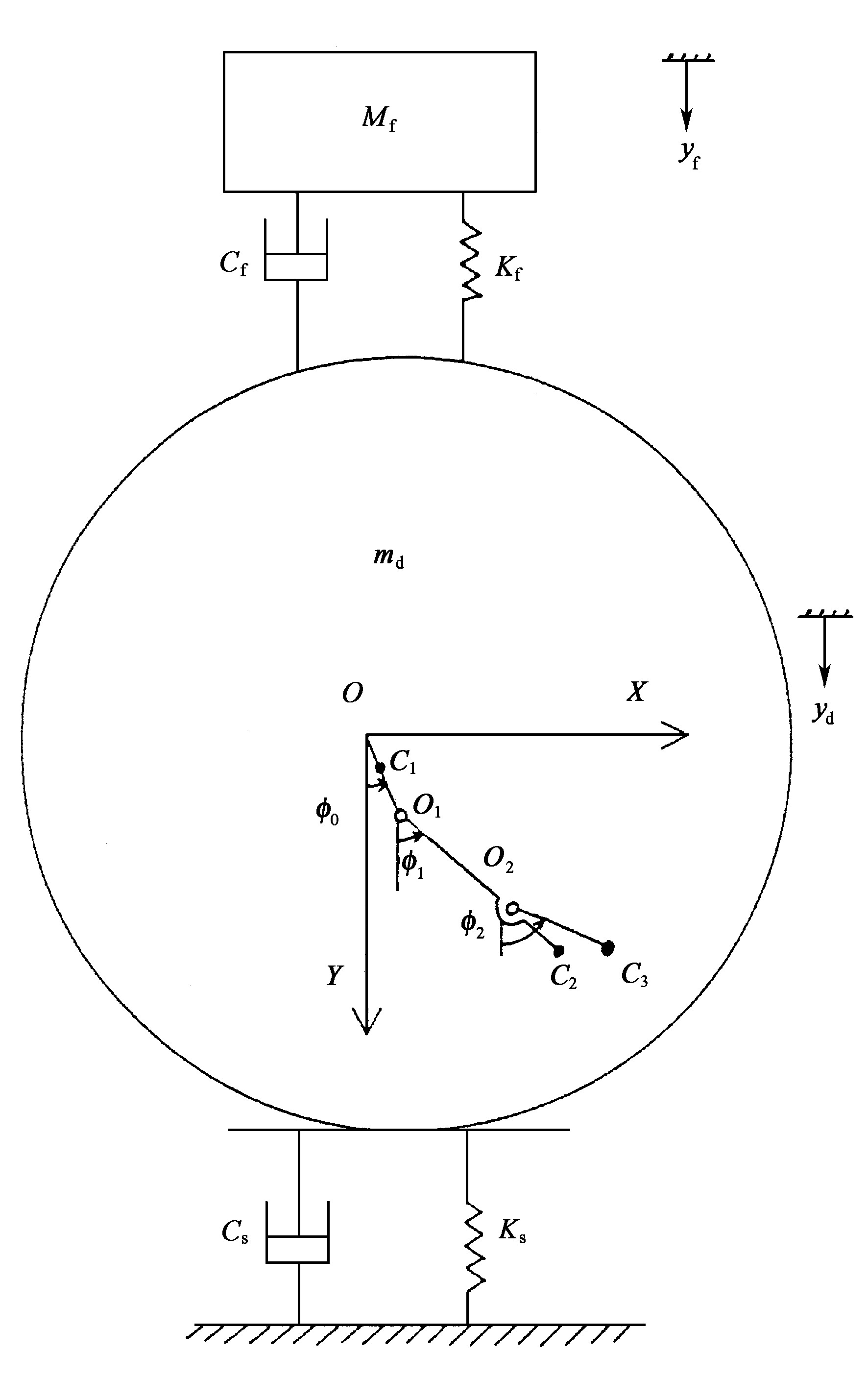
考虑振动轮在垂直方向的运动, 且假定振动轮始终与地面接触。混沌振动压路机“机架-振动轮 -土”系统的力学模型如图1所示。CVE-2型激振器由偏心1——OO1, 偏心2——O1C2 , 和偏心3——O2C3 组成。C1, C2和C3分别为偏心1, 偏心2与偏心3的质心。φ0=ωt, ω——偏心1的角速度。Mf——机架的当量质量。Cf ——减振器阻尼, Kf——减振器刚度, md ——振动轮质量, CS——土壤阻尼, KS——土壤刚度。
对图1的四自由度力学模型, 用Lagrange第二类方程, 以机架位移yf, 振动轮位移yd, 偏心2转角φ1, 偏心3转角φ2为广义坐标, 建立14 t混沌振动压路机的相应运动微分方程为:
式中常系数:k1=1 464 kg, k2=4.071 2×103kg, k3=0.078 6 kg·m2, k4=2.419 6 kg·m2,
k5=0.001 5 kg·m2, k6=0.022 5 kg·m2, k7=0.011 5 kg·m2, k8=0.768 1 kg·m, k9=0.394 4 kg·m, k10=5.769 3 kg·m , u1=3.864 6 N·m, u2=56.539 2 N·m, u3=1.434 7×104N , u4=3.989 8×104N, u5=14×106N/m, u6=5.25×106N/m, r1=7×104N·s/m, r2=2.625×103N·s/m, r3=0.311 4 N·s·m, r4=3.517 8 N·s·m .
《3 数值仿真与混沌识别》
3 数值仿真与混沌识别
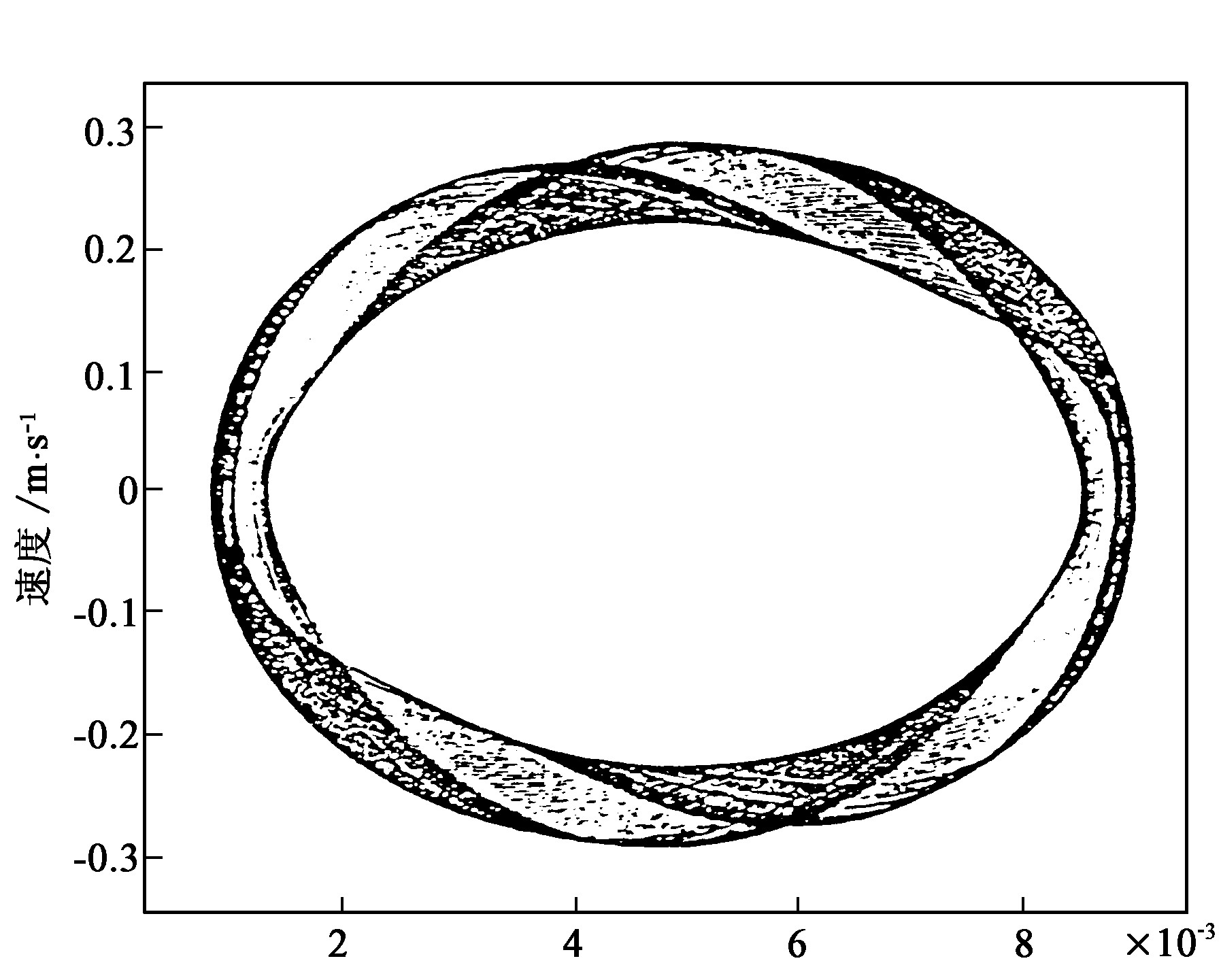
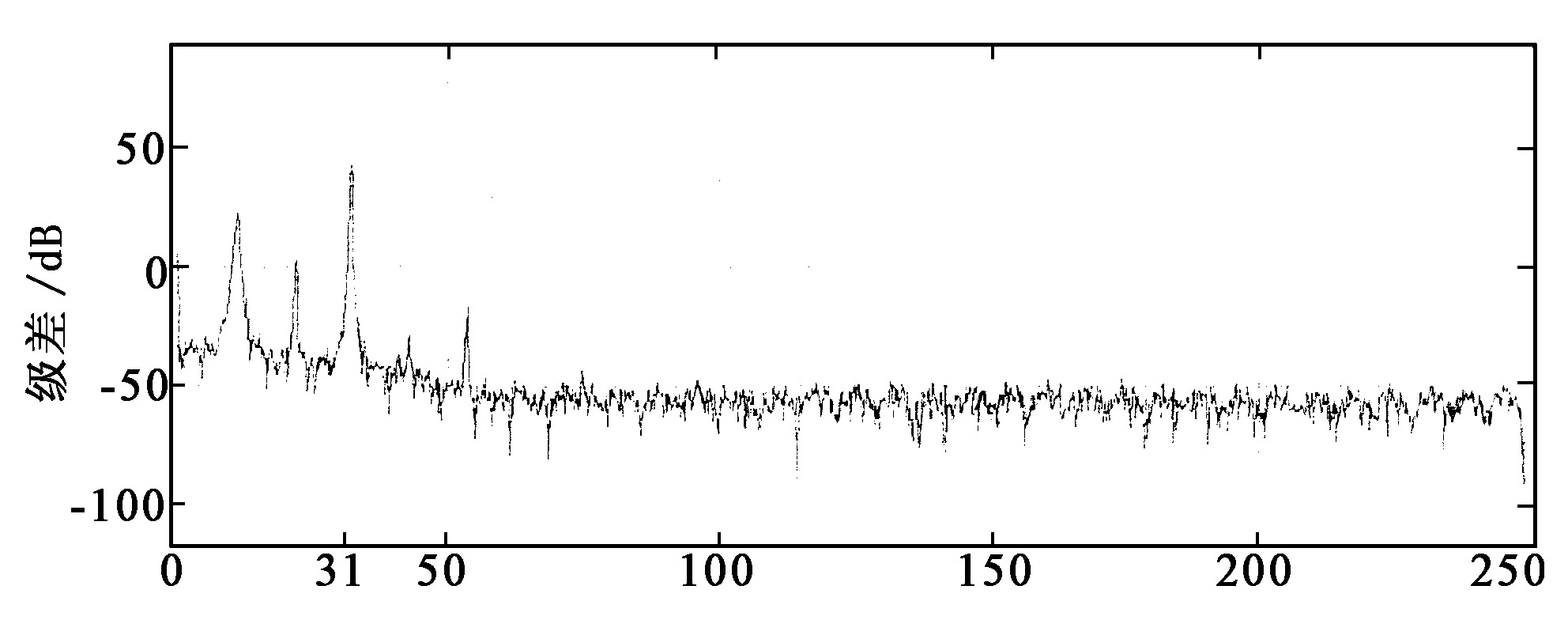
用MATLAB语言对14 t混沌振动压路机的压实力学模型进行数值仿真, 得到振动轮相轨图 (图2) , 加速度功率谱图 (图3) 及Lyapunov指数 (0.056 5) 。
Lyapunov指数为正, 相轨缠绕 (图2) , 功率谱为宽频 (图3) , 均表明振动是混沌的。
《4 振动试验》
4 振动试验
《4.1 试验工况》
4.1 试验工况
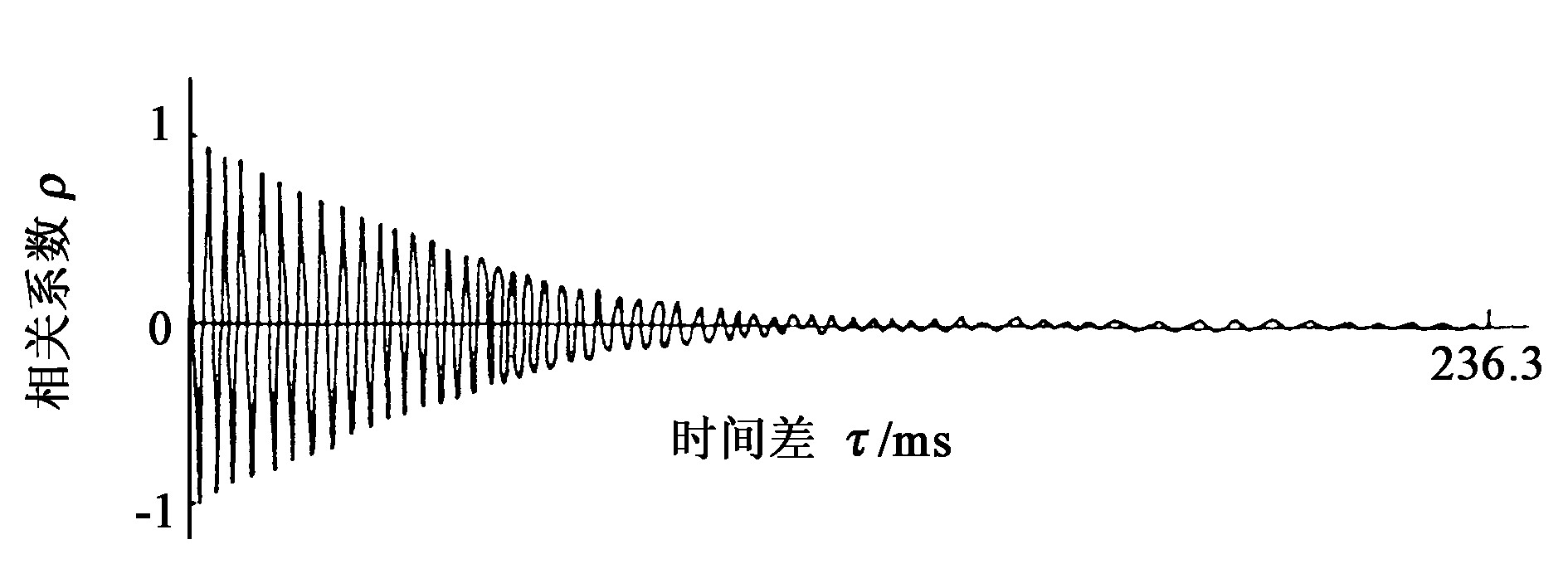
对重型混沌振动压路机 (14 t) 进行了振动试验, 试验时, 压路机停在混凝土地面上, 振动轮下垫轮胎, 加速度传感器放在振动轮上, 信号由B.K.2034信号分析仪进行实时处理。
《4.2 试验结果》
4.2 试验结果
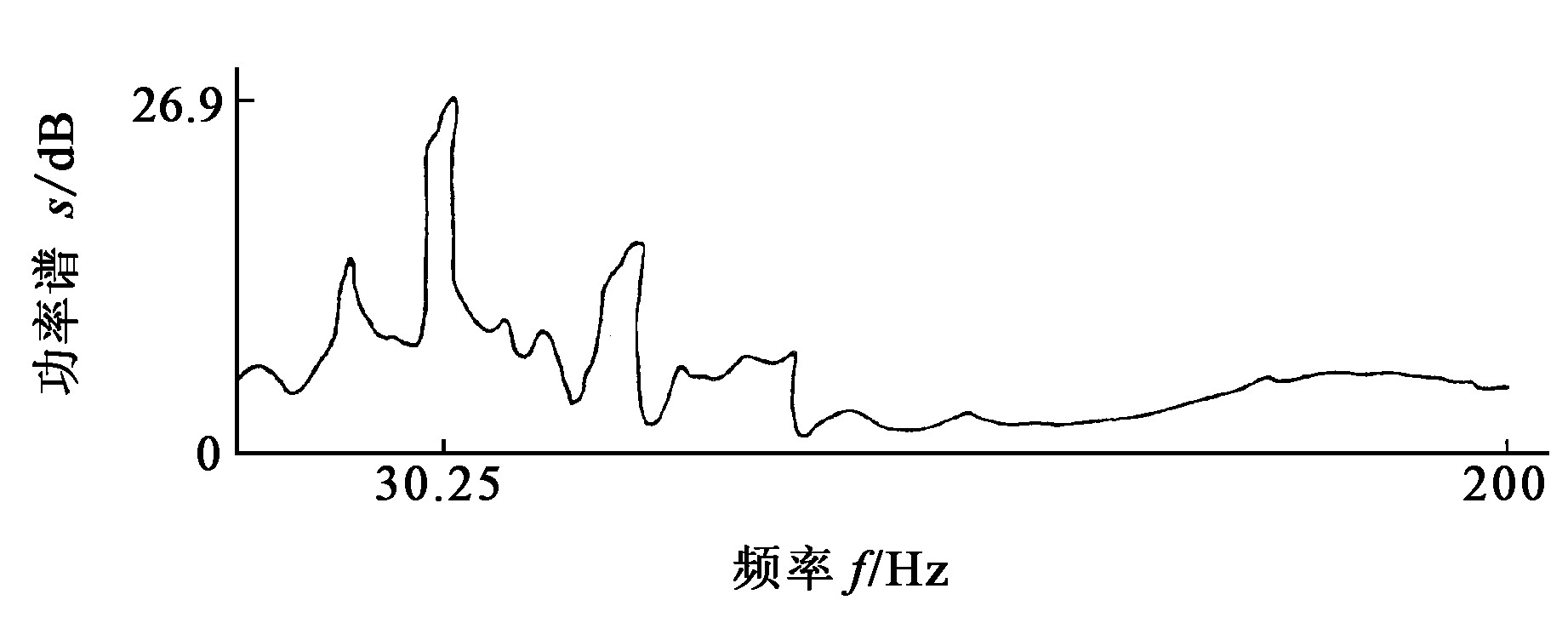
振动轮振动自相关图 (图4) 的衰减性体现了振动的不规则性。振动轮加速度实测功率谱 (图5) 的宽频性体现了振动在主频附近有丰富的频率成分, 这都证实压路机作混沌振动。
《5 压实试验》
5 压实试验
《5.1 试验工况》
5.1 试验工况
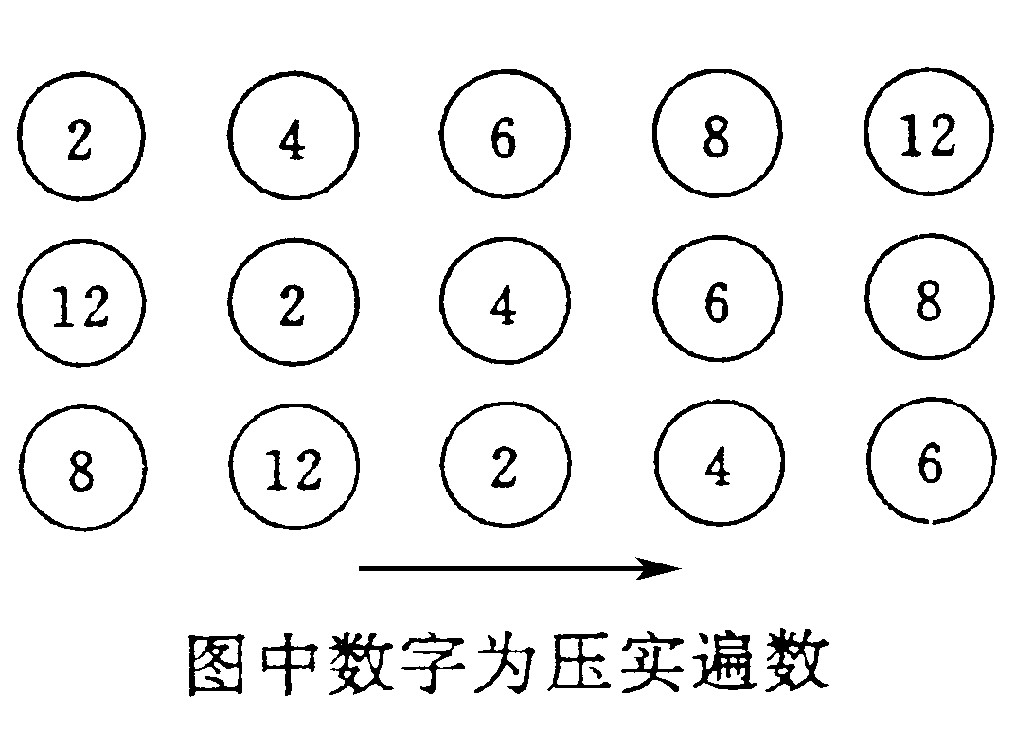
对重型混沌振动压路机 (10 t) 与同吨位的普通振动压路机用级配土进行压实对比试验。两台压路机平行轮流交替振压, 在不同压实遍数后用取土环刀取土样, 每次取三个点, 每点取三层:表层, 中层 (深20 cm) , 下层 (深40 cm) , 取样位置见图6。
《5.2 试验结果与分析》
5.2 试验结果与分析
图7为压实6遍后的压实曲线, 可见混沌振动压路机中层压实度已达到94.12%, 而普通振动压路机仅为91.23%。
若以中层压实度95%为压实合格, 从图8可见, 混沌振动压路机只需压7.9遍, 而普通振动压路机要压9遍。故可提高压实效率12.2%。试验的其它数据证明, 混沌振动压路机所有压实度均大于普通振动压路机。
《6 结 语》
6 结 语
振动试验与仿真结果表明:振动轮的振动是混沌的。
压实试验结果表明:混沌振动压路机比普通振动压路机可提高工效12.2%。
14 t重型混沌振动压路机已用于我国西部高速公路开发。这是混沌在重型机械中的首次应用, 它从理论与实践上证实了混沌的可控性与可用性。
《7致谢》
7致谢
在14 t与10 t混沌振动压路机的研制中, 对作为合作单位的上海工程机械厂和徐州工程机械厂的大力协作, 谨致谢意。











 京公网安备 11010502051620号
京公网安备 11010502051620号




