
《1 前言》
1 前言
微波成像仪是风云三号(FY-3)气象卫星的有效载荷之一。微波成像仪在多个特定的频率上接收来自地球表面和大气的水平及垂直两个极化的电磁辐射,将反映不同场景辐射亮温的输出电压,加上窄波束扫描得到的位置信息和其他相关的数据进行数字化处理后通过卫星传输到地面形成伪彩色图像,并反演出降雨、云和大气中水汽含量、土壤湿度、海温、海冰、雪覆盖及海面油污等分布情况,为天气预报、环境监测及军事应用等提供资料。微波成像仪所提供的全球性信息资料对提高天气预报的准确性,特别是预报台风、暴雨等自然灾害,对减少损失,保证航空、航海安全有重大作用。
在 FY-3 极轨气象卫星上,微波成像仪能全天候地提供遥感数据,可以遥感监测:a. 全球降水,特别是夏季暴雨;b. 云的液态水含量和云水相态;c. 土壤湿度;d. 海冰和雪覆盖。
微波成像仪由探测头部、冷空反射镜、配电单元、中央处理器、火工品控制器和扫描驱动控制器组成。冷空反射镜安装在卫星天顶面,配电单元、中央处理器、火工品控制器和扫描驱动控制器安装在星体内。探测头部是微波成像仪的主体部分,它以一个单机的形式安装在卫星头部。探测头部由天线、接收机、热定标辐射源和热反射镜、预处理器、扫描驱动机构等部分组成(见图1)。
《图1》
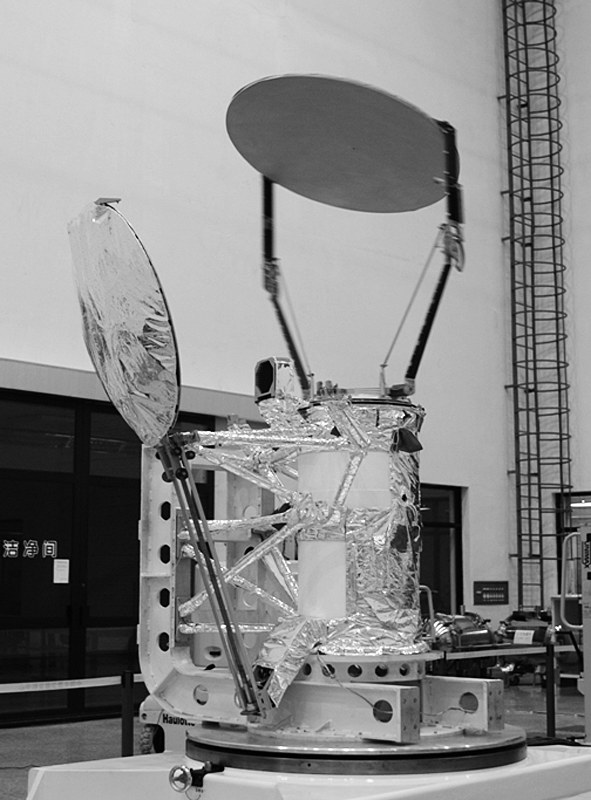
图1 微波成像仪
Fig.1 Microwave imager
在FY-3气象卫星01批发射成功的基础上,卫星用户提出了延长卫星寿命的要求,把01批的3年寿命要求延长到了5年,对产品的研制以及可靠性的保障提出了更高的要求。微波成像仪是集机、电、热一体的系统级单机,从功能上分析主要有天线、接收机、定标、控制和处理、扫描驱动、抬升和控制、热控、结构和机构等系统。而从其功能和性能分析,影响寿命延长的关键部分为扫描驱动系统和接收机系统。
《2 寿命风险分析》
2 寿命风险分析
《2.1 扫描驱动寿命风险分析》
2.1 扫描驱动寿命风险分析
扫描驱动系统由扫描驱动机构、动量矩补偿机构和扫描驱动控制器组成。其中扫描驱动机构主要包括电机、编码器和滑环组件;动量矩补偿机构主要包括电机和位置传感器。扫描驱动装置功能为驱动天线稳速扫描转动的同时,实现系统的动量矩补偿,并通过导电滑环可靠地传输功率和信号信息。
扫描驱动系统设计寿命从 3 年到 5 年,关键环节主要涉及两方面:a. 动量矩补偿机构轴承:动量矩补偿机构转速较高,为560 r/min,连续5年总转数需要达到1.5×1010 r,虽然其轴系采用油润滑,但达到该寿命要求存在一定的难度;b. 扫描驱动机构滑环:连续工作5年需要达到近亿转,对于滑环的摩擦对偶件,在5年寿命末期依然满足传输要求同样具有一定的难度。
《2.2 接收机寿命风险分析》
2.2 接收机寿命风险分析
微波成像仪接收机系统是一个五频点十通道的系统,在寿命延长的同时,用户对灵敏度和接收机非线性偏差的指标又大幅度提高,因此在达到高指标要求的同时必须保证其长寿命,微波成像仪接收机系统采用的是超外差接收机,技术方案比较成熟,由于其最高频率达到毫米波频段,采用了如高电子迁移率晶体管(HEMT)等器件,随着寿命的延长,对技术和工艺等都是一大挑战。接收机中的电子元器件在空间运行环境中所受的应力主要包括温度应力、空间环境应力以及自身的工作电应力所产生的综合应力的影响,由于这些应力的影响,在 5年寿命末期能保持接收机系统的性能没有恶劣变化也是提高接收机系统在轨寿命的关键。
《3 扫描驱动系统寿命分析和研究》
3 扫描驱动系统寿命分析和研究
扫描驱动系统包括扫描驱动机构与动量矩补偿机构,微波成像仪的核心器件、接收机、天馈都安装在驱动机构上,所以扫描驱动系统的正常工作是微波成像仪在轨运行的基本保证,是微波成像仪延寿实现的关键所在。扫描驱动机构由电机壳体、电机轴、轴承和依附于电机轴和电机壳体的导电滑环组成,电机输出轴为转筒提供轴向和径向支承,带动转动部分旋转完成天线扫描任务。动量矩补偿机构的作用是通过电机带动飞轮与转动体总成反向旋转来抵消由于转动部分旋转产生的动量矩,电机即飞轮的转速控制由扫描驱动控制器完成。
《3.1 扫描驱动系统电机寿命末期可靠度预估》
3.1 扫描驱动系统电机寿命末期可靠度预估
扫描驱动机构和动量矩补偿机构轴系均采用角接触球轴承。轴承寿命服从Weibull分布,其可靠度计算公式如下[1]

式(1)中,R 为任务末期可靠度;Ls为等效任务时间, r;L10为可靠度为0.9时的寿命;e 为Weibull斜率,球轴承e 为10/9。
在轨寿命5年电机需要的总转数:扫描驱动电机Ls 为9.3×107 r;动量矩补偿电机Ls 为1.5×109 r。根据扫描驱动机构和动量矩补偿机构轴承类型、尺寸、额定载荷、预载以及润滑情况得到其可靠度为 0.9时的寿命L10:扫描驱动电机L10为1.8×109 r;动量矩补偿电机L10为1.2×1010 r。
由公式(1)计算出工作5年轴承寿命可靠度:扫描驱动机构轴承可靠度为0.996;动量矩补偿机构轴承可靠度为0.990,达到了5年寿命末期可靠度的要求。
《3.2 扫描驱动系统部件裕度分析和研究》
3.2 扫描驱动系统部件裕度分析和研究
力矩裕度是机构设计和分析中所特有的,并且应用最为广泛,是最重要的设计准则,它直接影响到系统可靠性设计,并和其工作寿命密切相关。
微波成像仪活动部件主要是扫描驱动机构和动量矩补偿机构,扫描驱动机构和动量矩补偿机构都是由电机直接驱动,在轨工作环境下不考虑空气阻力以及重力引起的摩擦力矩,电机的驱动力矩由摩擦力矩与惯性负载启动力矩组成,其力矩裕度大小也是在寿命期内能否正常工作的关键,力矩裕度分析如下。
1)扫描驱动机构。通过对微波成像仪扫描驱动机构力矩和裕度的分析,可得到摩擦力矩 Tfr为 0.3 N;惯性力矩Tin为0.06 N ⋅ m;电机驱动力矩Tm为 2.3 N ⋅ m;力矩裕度Κ 为5.38。因此,满足力矩裕度 ≥2的要求。
2)动量矩补偿电机。通过对微波成像仪动量矩补偿电机力矩和裕度的分析,可得到摩擦力矩Tfr 为0.1 N ⋅ m;启动惯性力矩Tin为0.059 N∙m;电机驱动力矩Tm为0.9 N ⋅ m;力矩裕度Κ 为4.66。因此,满足力矩裕度≥2的要求。根据设计裕度,寿命由3年延长到5年不会对电机产品性能产生影响。
3)滑环。扫描驱动机构上滑环设计采取一环多刷双触点结构,同时电刷采用金基固体自润滑材料提高其耐磨性和可靠度。滑环设计时安全系数大于2,即设计寿命大于6年,因此,滑环能满足使用寿命为5年的要求。
《4 接收机系统分析和研究》
4 接收机系统分析和研究
《4.1 接收机系统寿命末期可靠度预估》
4.1 接收机系统寿命末期可靠度预估
接收机系统某一频点的可靠性模型图为串联结构(见图2)。在可靠性模型图中,假设各单元的失效出现是随机的、独立的,并认为各单元的可靠度服从指数分布,根据模型划分,设某一频点接收机可靠度为R(t),则

式(2)中,Ri(t)为第i 个单元可靠度。根据设计和分析,接收机系统5年可靠度预计为0.97,达到了5年寿命末期可靠度的要求。
《图2》

图2 接收机可靠性模型图
Fig.2 The receiver reliability model figure
《4.2 接收机系统延寿技术设计和研究》
4.2 接收机系统延寿技术设计和研究
接收机系统用于星载环境,宇宙空间环境对航天器会产生巨大危害,虽然接收机系统工作在微波成像仪探测头部内,不直接面对宇宙空间,但是仍承受宇宙辐射、深冷空间背景、频繁冷热交替等宇宙环境的强烈影响。因此设计时,应充分考虑空间环境对产品寿命的影响,并作相应的设计和研究。
针对寿命从 3 年延长到 5 年,对接收机重点在电磁兼容(EMC)、静电防护、抗辐照、热性能和工艺改进等方面进行了进一步的设计和研究。
4.2.1 EMC
依据卫星工作情况,对整个微波成像仪系统进行电磁特性分析,采取措施抑制电磁干扰和抗干扰。对微波电路严格按频率流程设计,确保无微波信号的干扰。接收机的本振是微波成像仪内部的信号源,避免了每个频段接收机的本振对其他接收机通道的影响和对其他部分电路和卫星上其他仪器、设备的影响。信号传输线采用屏蔽线。
信号接地的主要目的是为了抑制电磁干扰,设计时特别注意低电频电路的接地。接地点的位置选择需保证地线中的电流流向从小信号电路流向大信号电路,从而避免大信号电路地线电流对小信号电路产生干扰。加强电路的电磁屏蔽设计,并注意屏蔽的完整性和良好的接地措施。电磁屏蔽设计时,采用电导率高的材料作屏蔽体,并将屏蔽体接地。
4.2.2 静电防护
器件静电损伤大部分情况下是由累积效应引起的,是一种潜在性破坏,是长寿命工作的一大危害,因此做好防静电防护设计和研究对航天器可靠性至关重要,主要从以下几个方面进行设计和研究。
1)接收机中的部分元器件为静电敏感器件,主要是微波有源器件,该类器件在订购时,就要求厂家做好防静电保护措施,产品入库时要求用防静电保护的措施运输、储存,在器件安装时要求操作人员必须带静电手腕,防止人体静电对器件产生影响。在产品调试过程中,要求仪表要有良好的接地系统,工作台要有良好的防静电措施,严格禁止调试人员用手直接接触该器件,必须带静电手腕调试,产品在存放和传递过程中必须放置于防静电盒中。仪器的生产、测试、存放等要求试验厂房洁净度、温度、湿度达到一定标准。
2)接口防静电措施。射频接口采用波导结构、同轴结构等接口措施。低频接口主要是供电接口,使用电容滤波以后将电源线引入到内部电路。同时减小电源线的走线长度,以减小环境的干扰和信号之间的相互干扰。
4.2.3 抗辐照设计与分析
参阅美国航天局 JPL96—25《MMIC 可靠性保证指南》[2] 关于材料与器件抗电离辐射剂量的说明,可以看出双极晶体管的抗辐剂量约为2×104 rad(si)量级,GaAs 材料抗辐剂量可以达到 107 ~108 rad (si)量级。据此,单机内选用的关键微波元器件都用 GaAs 材料制成,而中频电路的晶体管均采用双极性晶体管。低频放大器选用满足抗辐射指标的器件,可以保证接收机整体的抗辐射性能。
接收机系统的各单机的外腔体和内部结构上都是一整块铝或铜,通过对电路进行合理的构形和布局,经过机加工使其形成许多相互隔离的微波腔,对空间辐射具有较好的屏蔽性能。
4.2.4 热设计与分析
依据卫星轨道参数及卫星边界条件对微波成像仪进行系统热设计,对微波成像仪采取独立的热控措施,使整个微波成像仪系统工作在最佳热环境中,并采取如下的一些措施。
1)涂层。对接收机机壳进行黑色阳极化处理,热辐射能力便大大加强。
2)合理进行机内布局。合理分布元器件,尽可能使发热零件分散,远离温度敏感的器件。
3)降低接触热阻。接触热阻和安装接触面的平直度和光洁度有关,较高的平直度和光洁度对降低接触热阻有益。为此,单机安装面提出了平直度和光洁度的要求,并在接触表面涂上导热膏或加导热绝缘硅橡胶片。
4)元器件的热设计。元器件的热设计包括元器件选择、对元器件工作温度的控制、元器件的自然散热、元器件的安装和布局。
4.2.5 工艺改进
把接收机中介质振荡器(DRO)的调谐盘改为固定结构,避免空间各种应力影响导致调谐盘变化而改变本振频率或性能变化,提高了长期使用的可靠性和频率稳定性。把接收机中部分射频组件的混频、前中、功分器电路基板从原采用导电胶粘接工艺改为焊料烧结工艺,提高了可靠性,延长了接收机寿命。
《5 加速寿命试验设想》
5 加速寿命试验设想
微波成像仪扫描驱动系统和接收机系统通过理论分析和设计措施,从目前来看,把寿命从3年延长到 5 年是可行的。在 01 批成功运行的基础上如果可以进行加速寿命试验验证,可以确保产品在轨性能万无一失。
加速寿命试验[3] 是验证星上产品可靠性的主要措施之一,针对扫描驱动系统和接收机系统的特点,设想重点对驱动电机、滑环和有 HEMT 器件的电路进行加速试验,以扫描驱动系统为例进行加速寿命试验的主要工作步骤如下。
1)确定产品敏感应力:通过对影响电机寿命和可靠性的主要应力以及在轨数据的分析总结,把电机和滑环的敏感应力定为温变(环境应力)和接触载荷(工作应力)。
2)多应力加速模型建立:建立温变和滑动磨损加速模型。
3)设计加速试验方案:针对产品的特点,进行加速退化试验。
4)进行加速试验:根据加速试验方案进行加速试验,并对其相关退化指标进行监控。
5)总结并给出分析评估:根据试验结果给出分析和评估。
《6 结语》
6 结语
FY-3气象卫星微波成像仪寿命从 3 年延长到 5 年,通过可靠性分析与评估以及各种改进措施的进行,已经能够达到5年在轨正常工作的水平。但是为了确保产品在轨5年获得优良稳定的性能,将继续努力实践,加强对星上产品延寿技术深入的分析和研究,验证其科学性、合理性及有效性,实现微波成像仪寿命的延长。











 京公网安备 11010502051620号
京公网安备 11010502051620号




