2001, Volume 3, Issue 10
Strategic Study of CAE >> 2001, Volume 3, Issue 10
Analysis of Characteristics and CMAC Neural Networks Controller of Electrohydraulic Servo System of the 6-DOF Paralle Platform
1. Shanghai Jiaotong University, Shanghai 200030, China
2. Shanghai International Airport Co. Ltd., Shanghai 201202, China
3. Harbin Institute of Technology, Harbin 150001, China
Next Previous
Abstract
This paper analyzed the kinematics and dynamics of the 6-DOF platform, and adopted CMAC Neural Networks as controller to realize tailing track. Simulation results showed that the analysis of kinematics and dynamics was correct and the controller had the capabilities of resisting disturbance and good robustness.
Keywords
6-DOF in-parallel platform ; CMAC neural network ; kinematics ; kinetics
Figures
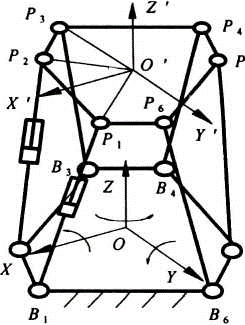
图1
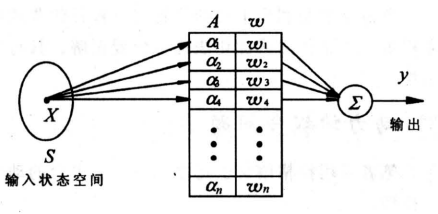
图2
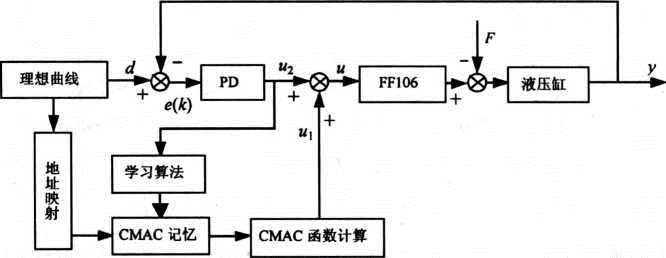
图3

图4
图5
图6
References
[ 1 ] Fichter E F. A stewart platform-based manipulator: General theory and practical construction [ J ]. Int J Robotics Res 1986, (5): 157~181
[ 2 ] Alizade R I, Tagiyev N R. A forward and reverse dis¬placement ananlysis of a 6-DOF in-parallel manipulator [J]. Mechanism & Machine Theory 1994, 29 ( 1): 115~124
[ 3 ] Hunt K. J. Neural networks for control systems-A sur¬vey [J]. Automatica, 1992, 28(6) : 1083 — 1112
[ 4 ] Albus J S. A new approach to manipulator control : The cerebellar model articulation controller (CMAC) [J]. J Dynamic System, Measurement and Control, Trans, ASME, 1975, 97(3): 220~227
[ 5 ] Albus J S. Data storage in the cerebellar model articula¬tion controller (CMAC)[j]. J Dynamic System, Mea¬surement and Control, Trans ASME, 1975, 97(3): 227~233
[ 6 ] Miller W T, Hewes R P, Glanz F H, et al. Real-time dynamic control of an industry manipulator using a neu¬ral- network-based learning controller [ J ]. IEEE Trans on Robotics and Automation, 1990, 6(1) : 1~9
[ 7 ] Miller W T. Sensor-based control of robotic manipula¬tors using a general learning algorithm [ J ]. J of Robotics and Automation, 1987, 3(2) : 157—165











 京公网安备 11010502051620号
京公网安备 11010502051620号




