2002, Volume 4, Issue 9
Strategic Study of CAE >> 2002, Volume 4, Issue 9
Study on Algorithm A* Based on Dynamic Representation of Binary Tree for Environment and Robotic Path Planning
1. Faculty of Computer, Guangdong University of Technology, Guangzhou 510090, China
2. Faculty of automation, Guangdong University of Technology, Guangzhou 510090, China
Next Previous
Abstract
This paper deals with a way of representing dynamic environment based on binary-tree. A new algorithm A* , which plans the path of soccer robots in complicated environments is presented. With the soccer game's environments represented by dynamic binary-tree, optimal results were obtained in a simulation of the soccer game.
Keywords
Figures
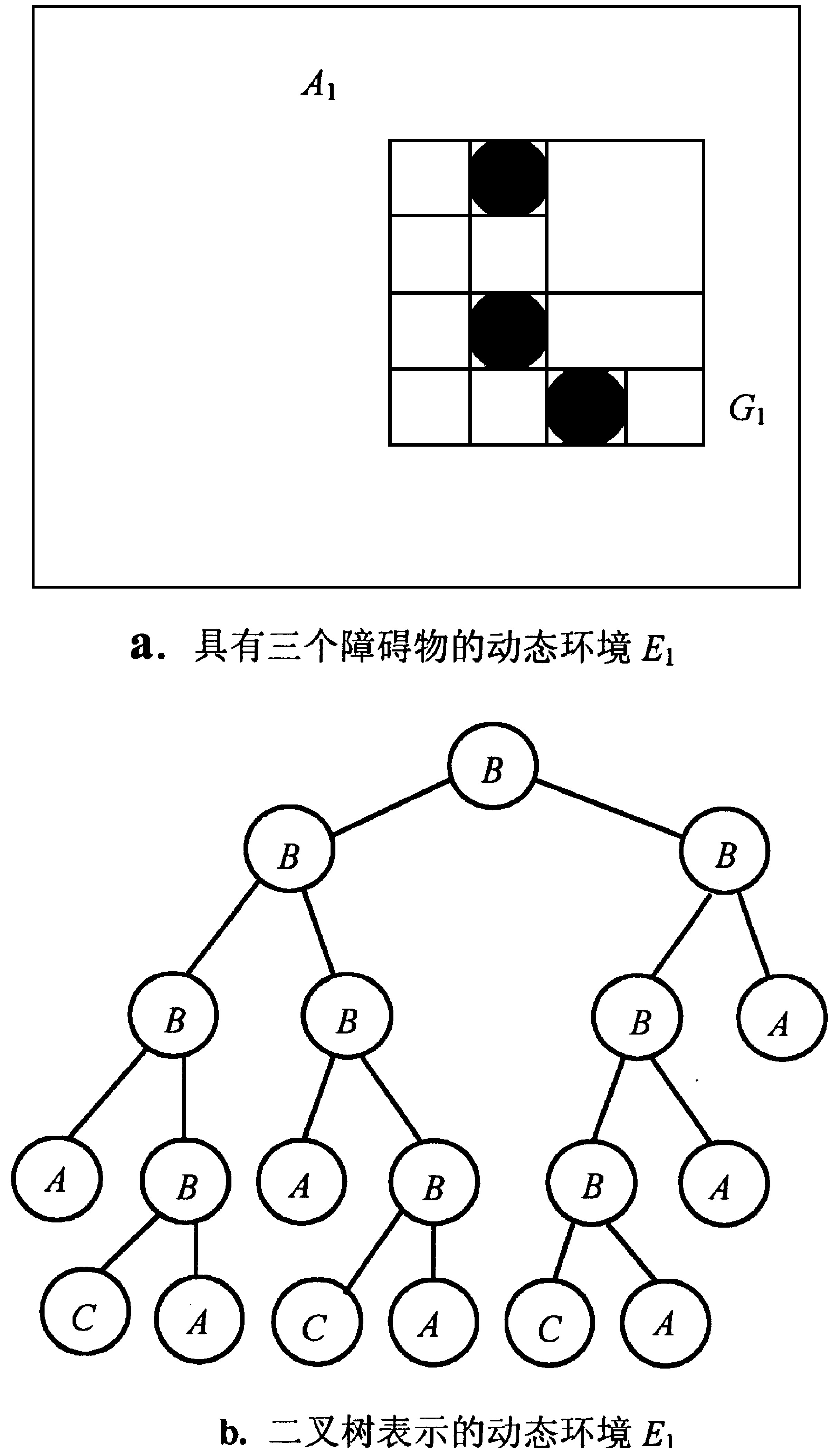
图1
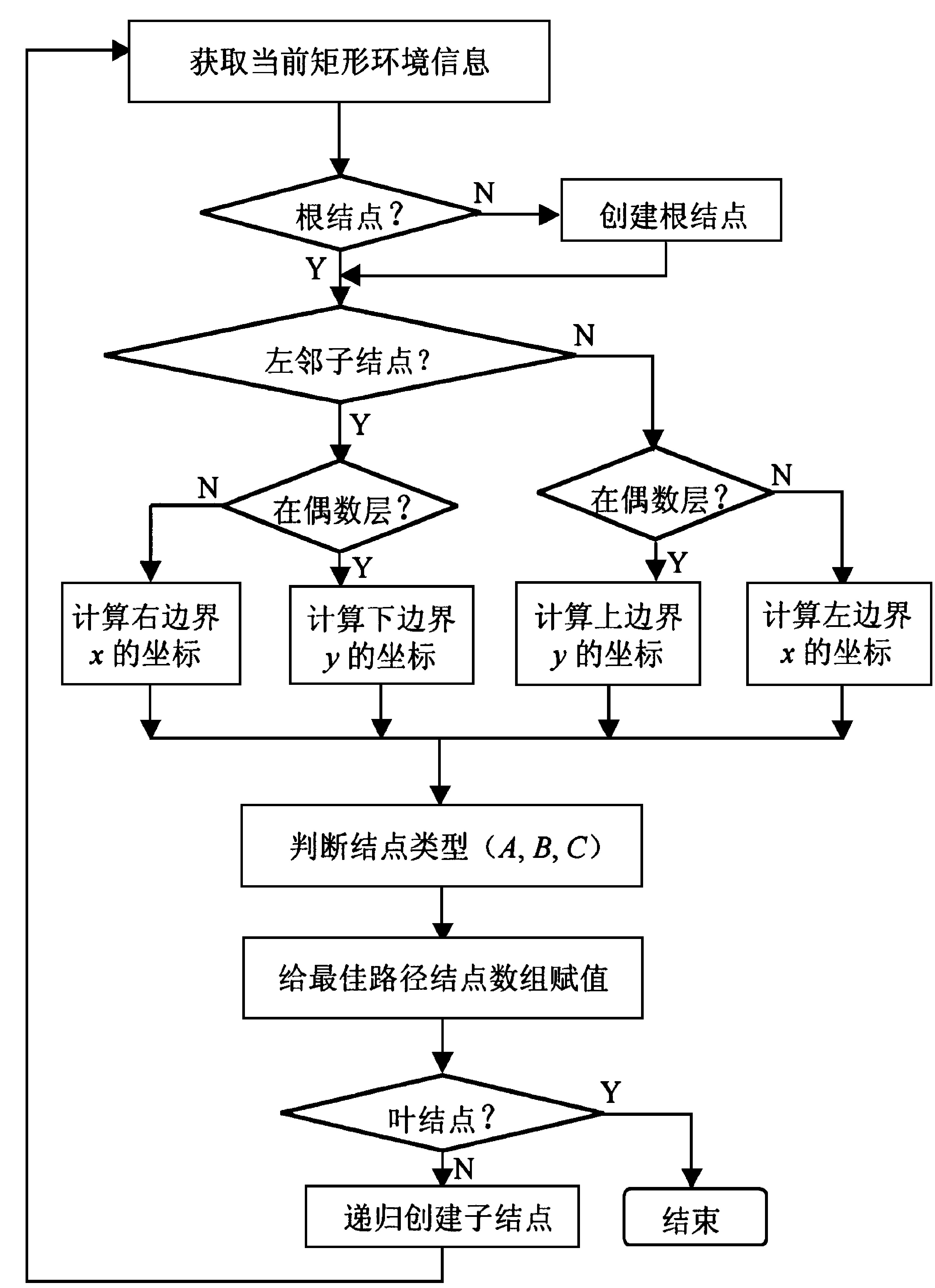
图2
References
[ 1 ] NoborioH , NaaniwaT , ArimotoS .Afeasiblemotion planningalgorithmforamobilerobotonaquadtreerepresentation[A].ProcIEEEIntConfRobotandAutomation[C], 1989.327~332
[ 2 ] 李 强, 林良民, 颜国正.一种新的移动机器人环境模型[J].机器人, 1999, 21 (5) :379~385 link1
[ 3 ] 张 育.移动机器人路径规划算法研究[D].上海:上海交通大学, 1996
[ 4 ] 蔡自兴, 徐光佑.人工智能及其应用[M ].北京:清华大学出版社, 1996 link1
[ 5 ] 严慧敏, 吴伟民.数据结构[M ].北京:清华大学出版社, 1996 link1











 京公网安备 11010502051620号
京公网安备 11010502051620号




