
2003, Volume 5, Issue 11
Strategic Study of CAE >> 2003, Volume 5, Issue 11
AUV Path Planning in 3D Seabed Environment Using Genetic Algorithm
College of Automation, Harbin Engineering University, Harbin 150001, China
Next Previous
Abstract
The path-planning algorithm of AUV in 3D seabed environment is studied. For 3D environment, the optimal paths are classified into three different types. The optimal paths of each type are obtained flexibly by using genetic algorithm, especially the incorporating of problem-specific knowledge and penalty function. Simulation results show the feasibility and reliability of the path-planning algorithm, which has considerable value on the safe navigation of AUV in seabed environment.
Keywords
3D path planning ; genetic algorithm ; seabed terrain ; underwater vehicle
Figures

图1

图2

图3
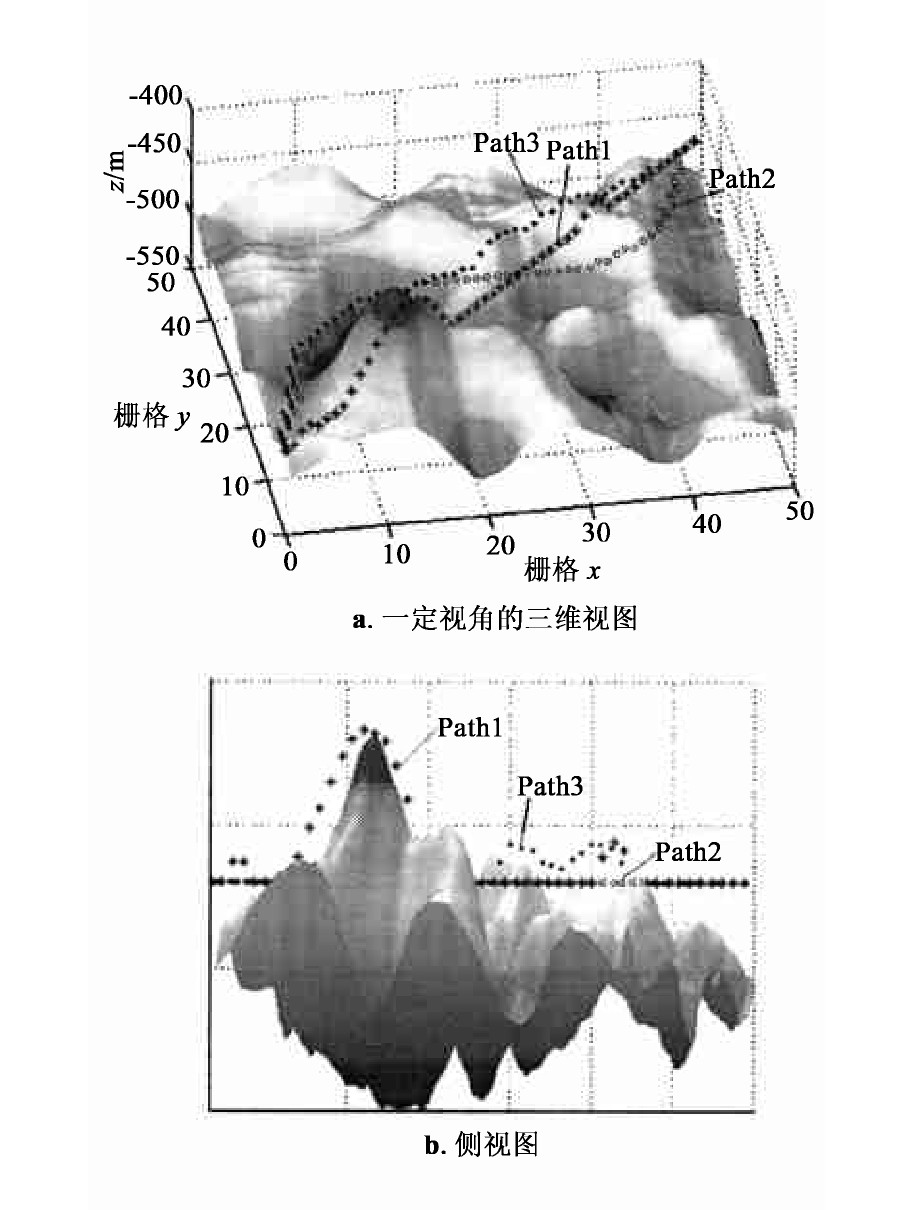
图4

图5

图6
References
[ 1 ] WarrenCW .Atechniqueforautonomousunderwatervehiclerouteplanning[J ].IEEEJofOceanicEngineering, 1990, (15) :199~204
[ 2 ] 孙茂相, 王艳红, 吴学曼, 等.动态补偿的水下机器人路径规划[J].机器人, 1993 (2) :8~12 link1
[ 3 ] CarollKP , McClaranSR , NelsonEL , etal.AUVpathplanning:anA approach[A ].ProcSymponAUVTechnology[C].WashingtonDC , 1992.79~84
[ 4 ] VasudevanC , GanesanK .Case basedpath planningforautonomousunderwatervehicles[J].AutonomousRobots, 1996, (3) :79~89 link1
[ 5 ] 尚 游, 刘百顺, 张万春, 等.基于案例的自主式水下机器人全局路径规划的学习算法[J].哈尔滨工程大学学报, 1998, 19 (5) :1~7 link1
[ 6 ] 孙树栋, 曲彦宾.遗传算法在机器人路径规划中的应用研究[J].西北工业大学学报, 1998, 16 (1) :79~83 link1
[ 7 ] 潘正军, 康立山, 陈毓屏.演化计算[M ].北京:清华大学出版社, 1998











 京公网安备 11010502051620号
京公网安备 11010502051620号




