2006, Volume 8, Issue 4
Strategic Study of CAE >> 2006, Volume 8, Issue 4
A Description Model for Dynamic Evolution of Robot Team Formation
1. Department Computer Science , Nanjing University of Science & Technology , Nanjing 210094 , China
2. Department of Computer Science , Beijing Information Science & Technology University , Beijing 100085 , China
Next Previous
Abstract
At present, there are some conception confusions about organization, team and group, and also team formation is still in qualitative analysis phase in multi-robot field. The paper, using Markov course and evolution calculation theory for reference, researches the difference between team and organization in conception and the formation mechanism of robot team from cooperative entity layer and ability layer. This paper proposes and describes a dynamic evolution model about robot team formation. There hasn't been a similar model at home and abroad now. The model can not only wholly describe robot team, but also quantitatively describe dynamical evolution course of the team formation.
Keywords
Figures
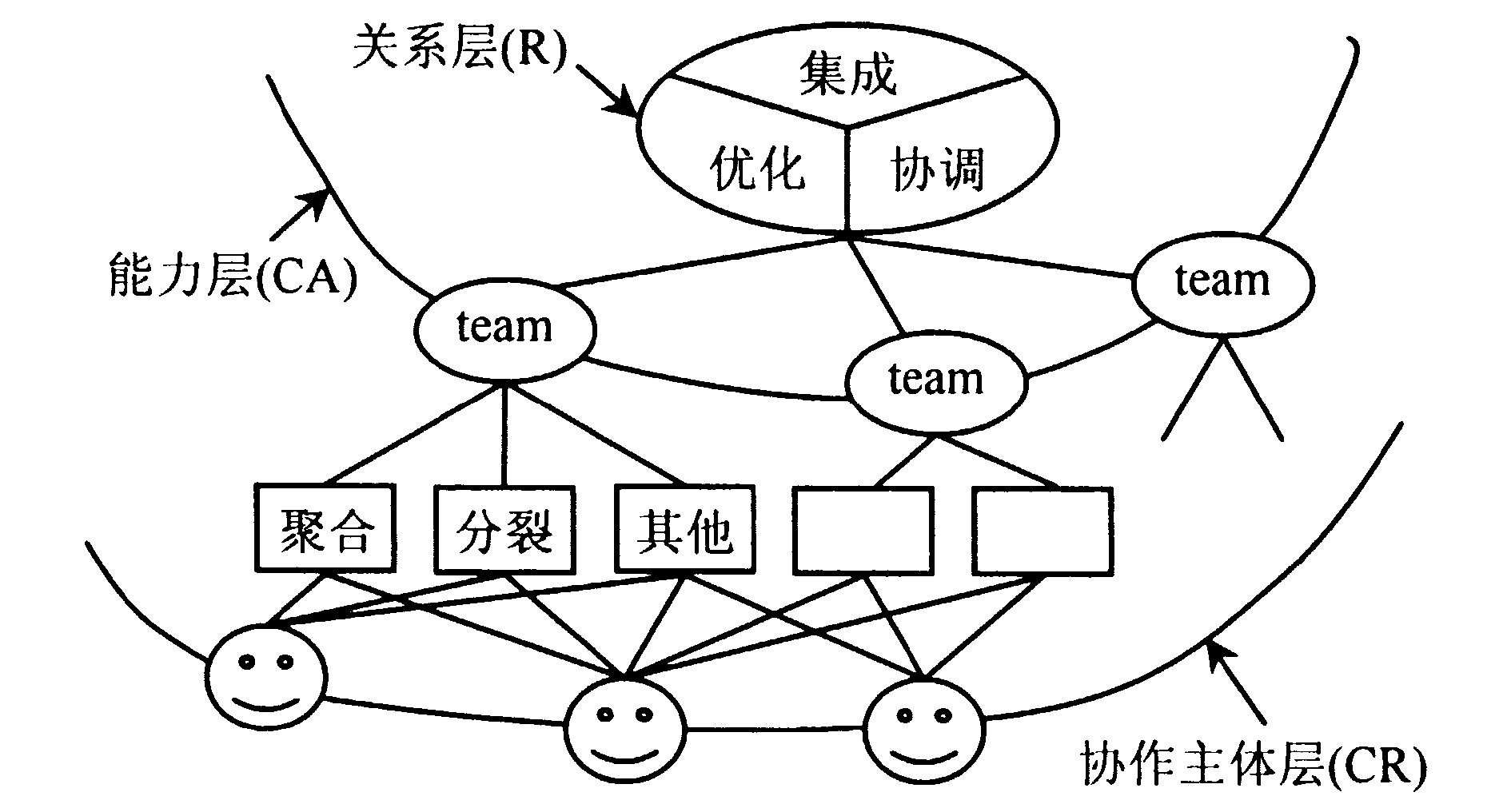
图1
References
[ 1 ] 席裕庚, 陈卫东.机器人向智能化的发展和多移动机器人协作系统[A].自动化综合技术[M].北京:自动化博览编辑部, 2003.149~153 link1
[ 2 ] Aarme H, Jakubik P, Schonberg T, et al.The concept ofrobot society and its utilization[A].Proceedings of theInternational Workshop on Advanced Robotics[C].Japan:Tsukuba, 1993.29~35
[ 3 ] Shen Weimin, Salemi B.Distributed and dynamic taskreallocation in robot organization[A].Proceedings of the2002 IEEE International Conference on Robotics&Automation[C].Washington DC, 2002.1019~1024
[ 4 ] Dahl T S, Mataric M J, Sukhatme G S.Adaptive spatio-temporal organization in groups of robots[A].Proceedingsof the 2002 IEEE/RSJ International Conference onIntelligent Robotics and Systems[C].EPFL Lausanne, Switzerland, 2002.1044~1049
[ 5 ] 唐振民.智能移动机器人及群体关键技术研究[D].南京:南京理工大学, 2001 link1
[ 6 ] 张艳, 史美林.描述虚拟企业协作关系动态演变的模型[J], 计算机集成制造系统 (CIMS) , 2003, 9 (11) :966~971 link1
[ 7 ] 李淑琴, 唐振民, 赵春霞, 杨静宇.一种基于多智能体系统的机器人群组织形式[J].计算机应用与研究, 2004, 21 (1) :61~63 link1











 京公网安备 11010502051620号
京公网安备 11010502051620号




