2007, Volume 9, Issue 10
Strategic Study of CAE >> 2007, Volume 9, Issue 10
Optimal Robust Control of AC Position Servo System for Multiple Rockets
School of Mechanical Engineering, Nanjing University of Science & Technology, Nanjing 210094, China
Next Previous
Abstract
In order to realize high speed and high precision position control in an AC servo system, in view of such kinds of uncertainties as moment of inertia and load moment changing widely, and strong impact moment, an optimal robust control tactics is put forward. Experimental results show that this control tactics has strong robustness, and has fairly good dynamic performances and steady-state precision.
Keywords
rocket mortar ; AC position servo system ; robust control ; optimal control
Figures
图1
图2

图3

图4

图5
图6
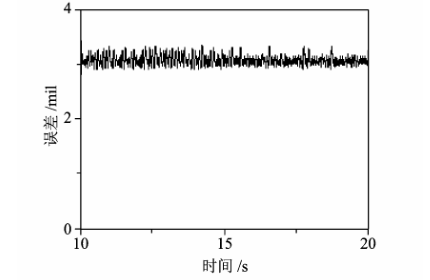
图7
References
[ 1 ] 彭熙伟,陈宝江,莫波,等.电液位置伺服系统的智能控制[J].北京理工大学学报,1997,17(3):344~349 link1
[ 2 ] 韩崇伟,林廷圻,贾志勇,等.基于H∞控制的火炮电液伺服系统研究[J].液压气动与密封,2002,(2):18~21 link1
[ 3 ] 解学书.最优控制———理论与应用[M].北京:清华大学出版社,1986
[ 4 ] 郭庆鼎,王成元.交流伺服系统[M].北京:机械工业出版社,1994
[ 5 ] 董炀斌,蒋静坪,吴茂刚.基于状态变换的交流伺服系统鲁棒二次最优控制方法[J].电工技术学报,2005,20(9):82~87 link1
[ 6 ] 韩崇伟.火炮位置伺服系统的鲁棒控制与应用研究[D].西安交通大学,2002
[ 7 ] 申铁龙.H∞控制理论及应用[M].北京:清华大学出版社,1996
[ 8 ] 严晞隽,高金源.鲁棒最优控制在随动系统中的应用[J].北京航空航天大学学报,2002,28(4):470~472 link1
[ 9 ] Gahinet P, et al.LM I Control Toolbox [ M ] .The Math Works Inc, 1995











 京公网安备 11010502051620号
京公网安备 11010502051620号




