


《1 引言》
1 引言
能源问题是当今世界普遍重视的问题。在给排水工程中, 水泵要消耗大量的能源, 电耗往往占制水成本的60 %以上, 我国每年水泵的电能消耗占电能总消耗的21 %以上
目前国内泵站装机是按最不利条件下的最大时流量和所需扬程配置的, 而在实际运行中, 泵站的流量和扬程在绝大部分时间里远低于所设计的流量和扬程。为了节能降耗, 必须采取调节措施使泵站适应负荷的变化运行。依靠阀门开启度来调节水量在阀门上产生了附加的扬程损失, 降低了泵效。应用变频调速恒压供水系统, 实时切换并联水泵、调节水泵转速, 使水压恒定。但是, 恒压供水系统仅仅根据水压 (即扬程) 进行调度, 有一部分能量消耗于管网中, 而且也未考虑调速水泵的效率问题。同时根据流量和扬程两个指标调度, 使水泵变压变流量运行, 有可能实现最佳的节能效果。
变压变流量调度在理论上属于有约束非线性规划问题。分别考虑水泵的台数切换或者只调速, 均达不到最佳的节能效果
变压变流量调度的常见建模方法为:为了使能耗最低, 通常取目标函数为水泵的轴功率, 同时以供水指标和水泵高效区作为约束条件, 但是建模复杂, 不易求解;取满足扬程指标时的实际流量与所需流量之差的二次方作为目标函数, 并约束水泵在高效区运行来建模, 约束条件少, 求解简便, 但与实际并联工况差别较大。因此, 提出了一种模型的物理意义与实际变压变流量运行工况相符的建模方法, 具有较高的精度, 并考虑了水泵的效率、模型求解运算量、水泵切换频率等工程实际问题。
《2 水泵给水系统工况分析》
2 水泵给水系统工况分析
《2.1水泵特性》
2.1水泵特性
离心泵在额定转速n0运行时满足扬程H与流量Q的H—Q特性曲线:
其中HX为流量为零时的虚总扬程, SX为泵体内虚阻耗系数。当其转速下调时, H—Q 曲线平行下移。若转速下调到n1, 则H—Q特性变为:
其中k= (n1/n0) 2为调速比。
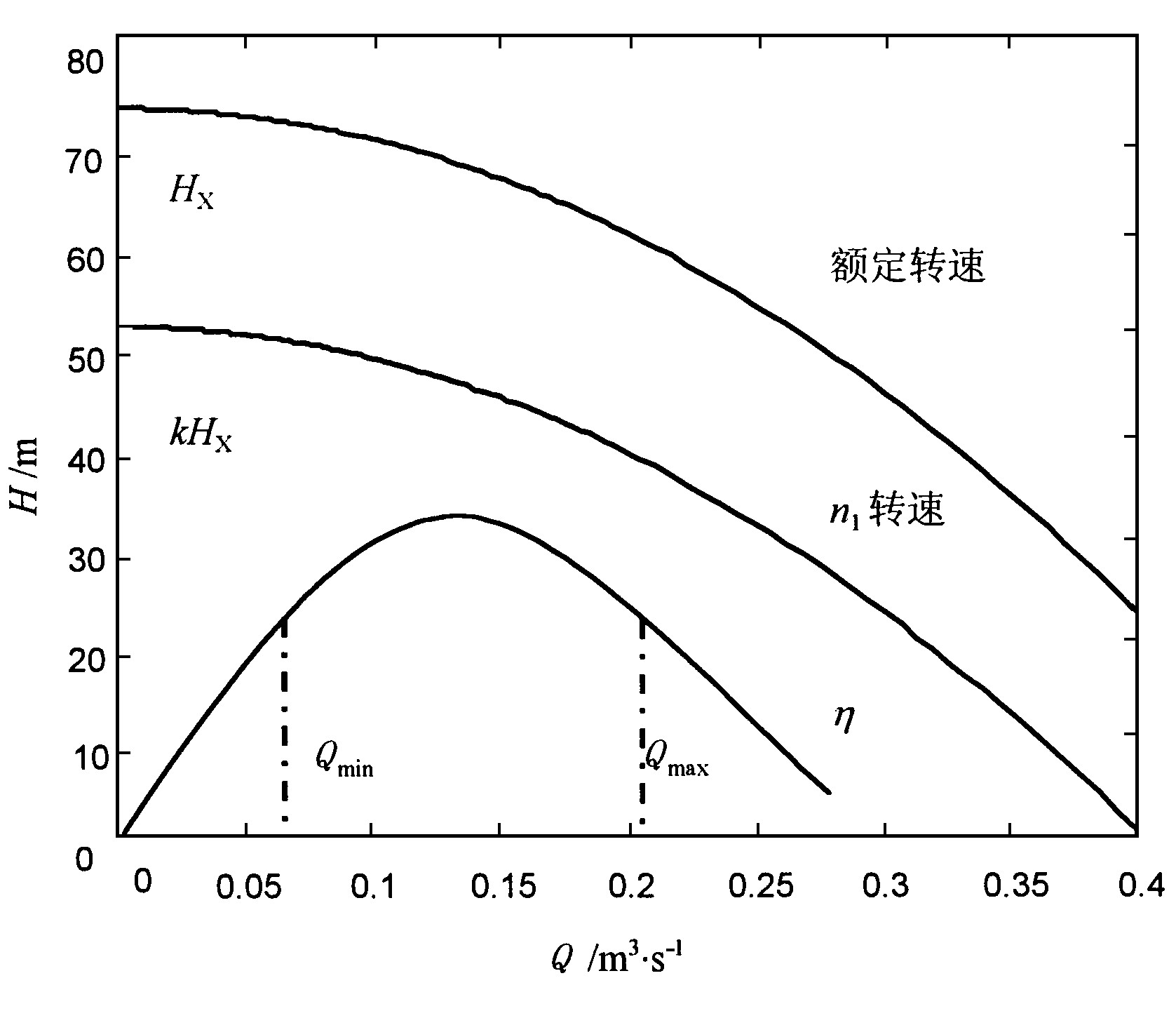
根据η—Q特性曲线, 水泵转速过低时, 其效率η将急剧下降, 故应限制水泵调速范围[kmin, 1];又Q过高或过低时, 效率η也很低, 还应限制流量Q范围[Qmin, Qmax]。这样可保证水泵在高效区工作, 如图1所示。
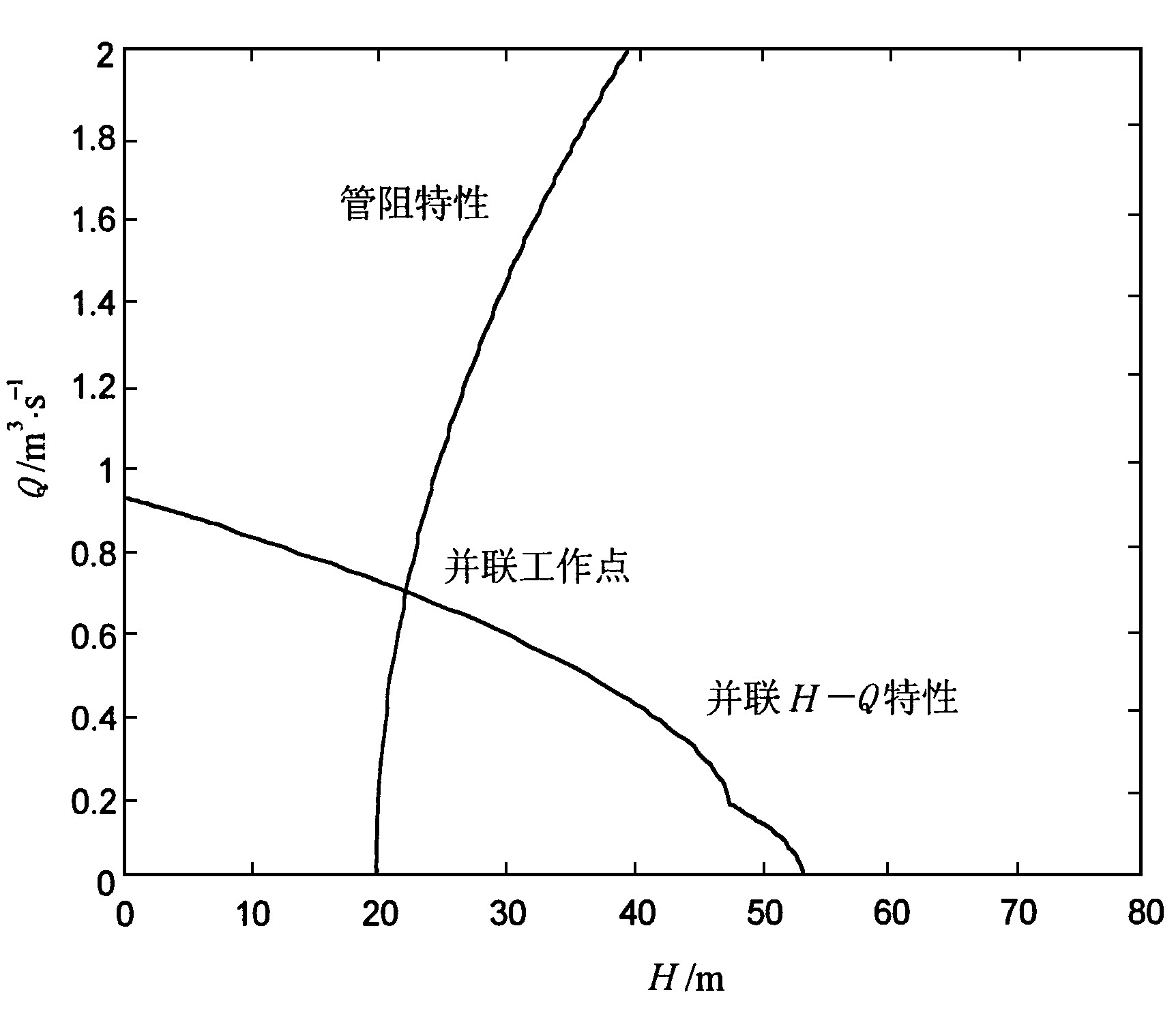
当多台水泵并联工作时, 将各水泵在相同扬程下的流量相加, 可得并联后的H—Q特性曲线, 如图2所示。
水泵运行应保证管网最不利供水点的用户能得到足够的水压。用户得到的水量是由用户端的阀门所决定的, 只要在水量变化时维持用户水压在所需的扬程值HST, 就能保证用户得到所需水量, 故最终目的是控制用户水压。但是用户端距泵站较远, 中间通过管网相连, 不易检测用户水压。在实际工程中, 扬程H的测量点一般设置在水泵出水口处。当水流经管道时, 由于受到阻力而损失扬程
其中S为管道阻力系数。故水泵实际应提供的扬程为
其中HST 为用户所需的扬程, 式 (4) 称为管阻特性。可见, 为了得到水泵应提供的扬程H, 必须预测用户所需水量, 即管网流量Q。
《2.1调度原则》
2.1调度原则
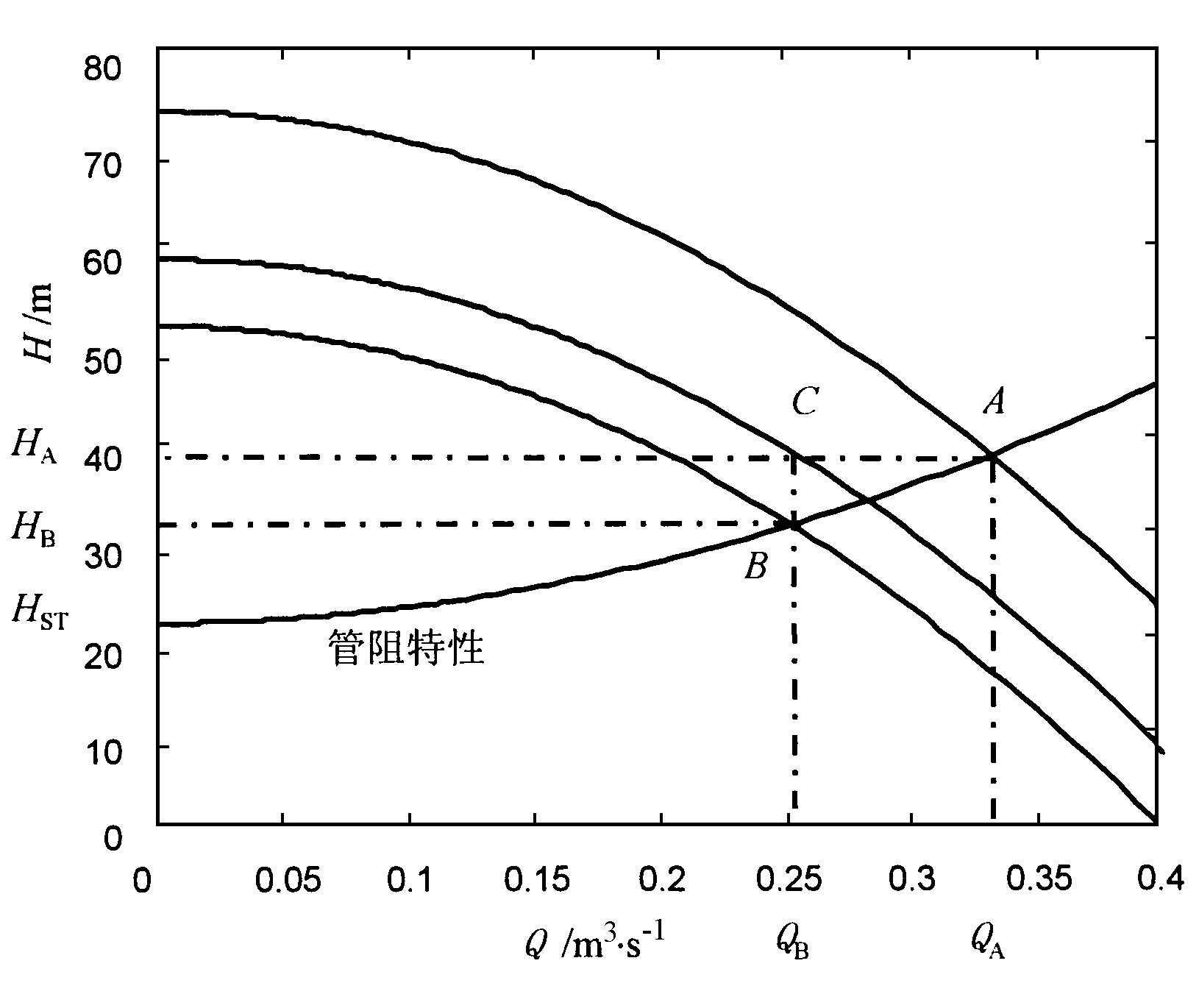
常见的恒压供水系统设计思路为:根据最不利条件下的流量QA和用户所需扬程HST确定水泵应提供的扬程HA, 选择水泵参数使其工作在A点 (HA, QA) 。在运行过程中, 只检测出水口处水压H, 并根据H进行调度, 使水压恒定在HA。若流量由QA减小到QB, 水泵工作点将沿水平线H=HA移动到C点 (HA, QB) 。但是根据式 (4) , 水泵此时应提供的扬程为
故多提供了扬程HA-HB, 这部分能量将消耗在管网中, 而且当HA-HB很大时会导致管网破裂, 造成用户供水中断和水资源的浪费。
变压变流量运行是根据流量Q和用户所需扬程HST进行调度
《3 优化问题模型》
3 优化问题模型
《3.1问题描述》
3.1问题描述
假设某泵站有n台离心泵, 其中1#, 2# , …, m#为调速泵, 其H—Q特性为
其中ki为调速比。设 (m+1) #, (m+2) #, …, n#为定速泵, 其H—Q特性为
管阻特性为:
供水指标为 (HST, Qe) , 即用户所需扬程为HST, 所需流量为Qe。
《3.2建模方法》
3.2建模方法
一般常用建模方法为:以水泵轴功率作为目标函数, 以调速范围[kmin, 1]、流量范围 [Qmin, Qmax] 和供水指标 (HST, Qe) 作为约束条件, 保证水泵高效工作且满足供水要求。这种方法直观, 容易理解, 但是约束条件多, 不易求解。
考虑到水泵轴功率
其中 γ 为水的比重, η为水泵的效率。由上式可知:在满足供水指标的条件下, 当扬程H、流量Q为最小值且工作在高效区时, 轴功率最小, 电能损耗为最小值。由此可建立另一种优化模型
其中
wi表示第 i#泵的工作状态 (1—工作, 0—不工作) 。
此模型是以满足扬程指标HST时的实际供水量Q与Qe之差的二次方作为目标函数, 同时通过约束调速范围保证水泵高效工作。在式 (12) 和式 (13) 中, λi, ci, di表示水泵高效工作时的调速范围和流量范围的约束条件kmin, Qmin, Qmax, 在Qmin, Qmax下计算最佳工作点的调速比, 并与λi、1比较, 使高效工作的约束条件只用调速范围 [αi, βi] 来表示, 这样简化了模型。
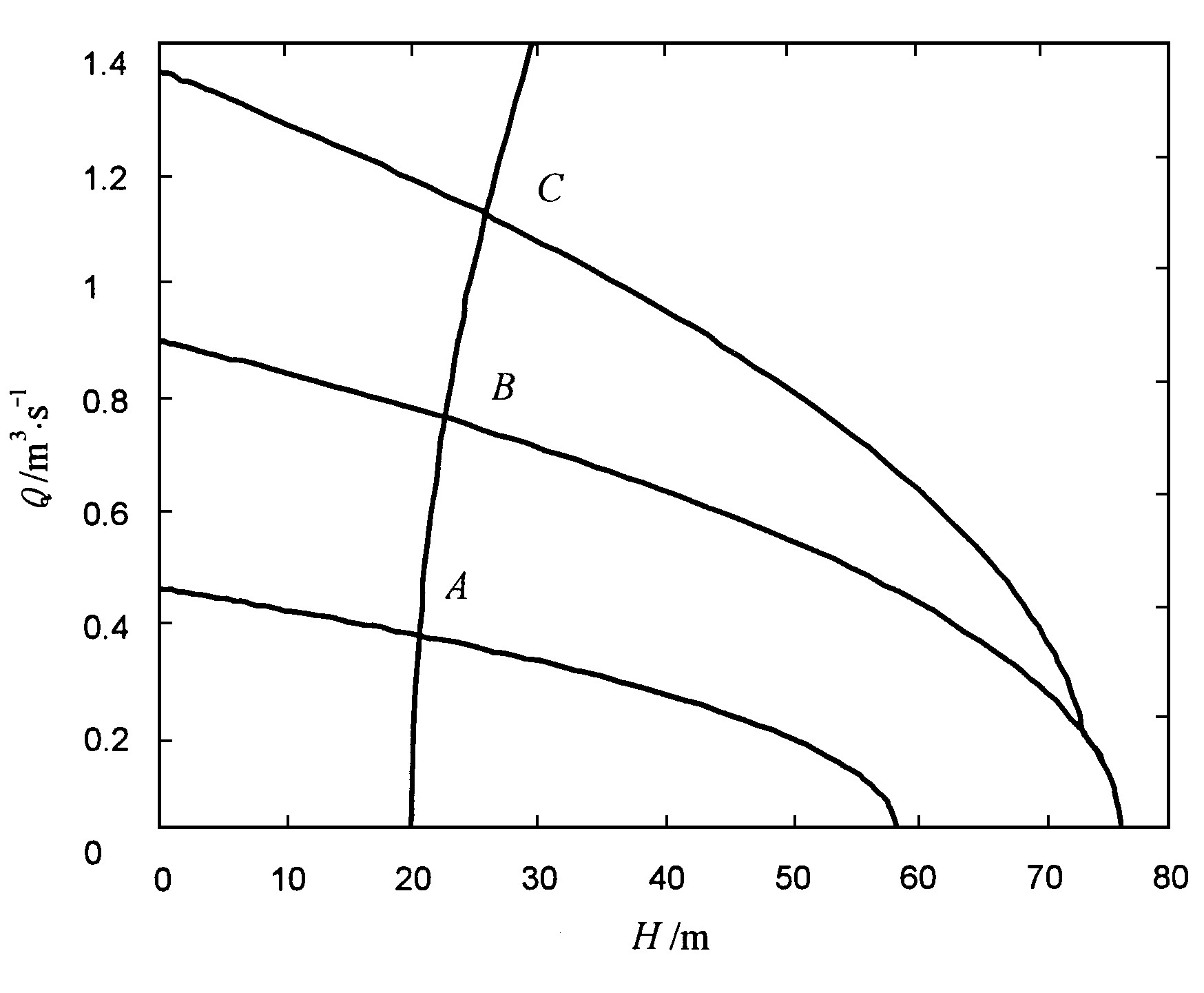
此模型存在不足:其目标函数与并联水泵的实际工况并不相符。它是将各水泵H—Q特性曲线与管阻特性交点的流量Qi直接相加, 并作为并联工作点的流量ΣQi, 但各交点的扬程并不相等, 如图4所示。事实上, 水泵并联工作是在相同扬程下各水泵的流量叠加, 故此目标函数中的总流量并不是并联工作时的实际流量, 应先写出并联后的H—Q特性方程, 然后与管阻特性方程联立, 求得两曲线交点处的流量才是真正的并联工作时的ΣQi。
并联工作的H—Q特性方程为:
式 (15) 和式 (8) 联立消Q可得:
式 (16) 中含有n+1个根号, 很难解出H的解析表达式, 也就无法得到Q的解析表达式。因此, 目标函数F= (ΣQi-Qe) 2不具有解析表达式形式, 其计算量很大, 计算精度也难以保证。但前述近似处理方法
考虑到利用已知的供水指标和管阻特性可以确定并联工作的最佳工作点。将供水指标 (HST, Qe) 代入管阻特性, 求得并联水泵的最佳工作点 (He, Qe) , 然后将各水泵在He下的流量相加得到并联工作时的总流量ΣQi, 这样就可得到目标函数F= (ΣQi-Qe) 2的解析表达式。这种方法是先确定最佳工作点, 然后通过选择水泵工作台数和调速泵的调速比, 使并联后的H—Q特性与管阻特性相交于该工作点上。
故优化模型为:
其中:αi, βi, ωi见式 (12) 、式 (13) 和式 (14) 。
《4 优化模型求解》
4 优化模型求解
式 (21) 的优化模型可结合0—1完全枚举法和Wolfe既约梯度法进行求解, 即首先将wi取0或1的各种组合全部列出, 并对每一种组合情况按照Wolfe既约梯度法搜索目标函数最优值, 然后比较各组合情况的目标函数最小值, 选取其中最佳者作为结果。为表述方便, 定义水泵运行n维状态权值向量w和m维调速比向量k:
其中w将各泵的运行状态wi合并为向量, 表示泵站所有水泵的运行状态;k是各调速泵的调速比ki合并的向量。
下面以n=5, m=2为例介绍求解步骤。
Step 1 0—1完全枚举。w的所有可能取值如表1所示, 共31种, 其中第4, 8, 12, 16, 20, 24, 28种只开定速泵, 不能利用变频调速节能, 故不予考虑。当取w为某一特定值时, 各水泵是否工作就完全确定, 目标函数F仅随调速比k而变化。如 w=
Step 2 对每个w值, 采用Wolfe既约梯度法搜索目标函数最优值。其基本思想是:把变量分为基变量和非基变量, 它们之间的关系由约束条件确定, 将基变量用非基变量表示并从目标函数中消去基变量, 得到以非基变量为自变量的简化的目标函数, 进而利用此函数的负梯度 (称为既约梯度) 构造下降可行方向。在此之前首先进行变量代换,
则目标函数可改写为:
再按照Wolfe既约梯度法进行求解, 即引入松弛变量, 将不等式约束转化为等式约束, 选择基变量, 将目标函数化为仅含非基变量的函数, 计算非基变量的梯度即既约梯度, 按梯度法迭代, 判断换基。
Step 3 比较各个w下的目标函数最优值, 选取其中“最佳”者作为求解结果输出。在工程实际中, 此处最佳意味目标函数接近最小值。考虑到大型水泵启动比较困难, 故切泵动作应越少越好。若存在多个w下的目标函数最优值满足精度要求, 则按下式进行选择:
且 j≠4, 8, 12, 16, 20, 24, 28。 (31)
其中w
《5 仿真实验》
5 仿真实验
使用数学软件MATLAB优化工具箱中的fmincon进行仿真计算, 它具有约束非线性规划的求解函数。下面仍以n=5, m=2为例, 采用表2的水泵参数编程进行仿真计算, 其中管阻特性参数S=5, 即:
Table 2 Simulation data
《表2》
泵号 | HXi /m | SXi /s2·m-5 | αi | βi |
1# | 73.12 | 317.12 | 0.50 | 1.0 |
2# | 81.76 | 188.17 | 0.50 | 1.0 |
3# | 76.25 | 100.00 | ||
4# | 76.25 | 100.00 | ||
5# | 76.25 | 100.00 |
若给定 (HST , Qe) = (20, 0.682 2) , 则:
w*=
最优点的目标函数值为:
F*=0.000 000 000 004 16。
采用图解法对上述结果进行验证, 即检验w=w*, k=k*时并联水泵的H—Q曲线与管阻特性曲线的交点处的Q是否为Qe。如图5和图6所示, 图6是图5的局部放大。从图中可以看出w=w*, k=k*时并联水泵的工作点处的Q≈Qe=0.686 2, 与模型求解结果相同。
若给定 (HST , Qe) = (20, 2.132 13) , 则
w*=
最优点的目标函数值为
F*=0.000 000 000 003 96。
事实上,
w31= (1 1 1 1 1) , k31= (0.706 997 174 424 910.641 312 410 827 75) ,
目标函数值为
F=0.000 000 000 000 26,
比F*更理想, 但考虑到工程中所能分辨的精度和切泵频率, 并考虑式 (30) , (w*, k*) 为最佳调度结果。对此结果仍可按照图解法进行验证, 其精度是令人满意的。
《5 结论》
5 结论
在分析并联水泵变压变流量运行优化调度问题的常用建模方法并比较各种方法优劣的基础上, 提出了一种新的建模方法。该方法从并联水泵实际运行工况出发, 以满足扬程指标时的实际流量与所需流量之差的二次方作为目标函数, 以水泵的高效区作为约束条件。该方法不仅考虑了供水指标、水泵的效率、模型求解计算量等工程实际问题, 而且模型物理意义与实际工况相符, 并根据水泵运行的权值向量的范数选取切换动作最少的解, 从而使切换频率最低, 故具有较高的精度与较强的实用性。仿真结果表明该方法是有效的。在实际控制系统中应用该模型, 并结合变频调速技术, 可使水泵高效、经济运行, 这对于节能降耗及提高我国供水行业的经济效益, 都具有十分重要的现实意义。











 京公网安备 11010502051620号
京公网安备 11010502051620号




