
《1 前言》
1 前言
与传统的控制系统采用点对点的信息无损传送方式相比,网络控制系统(NCS)[1]中的信息传送是通过公用或专用的通信网络进行传输的。由于 CPU 资源、网络带宽的限制以及传输机制的影响使得网络控制系统中的信息传输不可避免地存在着网络时延,时变的网络时延使得网络控制系统的分析变得更为复杂。从不同的角度处理时变的网络时延有不同的方法,一种方法是选择合适的控制方法来补偿网络时延对控制性能的影响[2,3];另一种是设计一个有效的调度管理策略对共享资源进行合理的优化和分配,在保证系统稳定的前提下最大限度地降低网络诱导时延对系统控制性能所带来的影响。
Hong 提出了基于时间窗原理的采样时间决策算法,使得每个控制回路的性能得到满足的同时提高了网络资源的利用率[4]。随后,Hong 和 Kim 将此算法扩展应用到了 CAN、周期性服务网络的带宽分配[5~7]。Park 等提出了一种调度算法使控制系统的采样周期尽可能的小,并且对 3 种类型的数据传输的带宽进行分配,保证周期性数据和偶发性数据传输的实时性,同时使非实时数据传输带宽利用率最小化[8]。文献 [4~8] 均是通过采样时间决策算法寻求各个控制回路的采样周期,对各个控制回路而言还是属于固定带宽分配方法。
在近年来的实际应用中,为了充分利用共享的网络资源和 CPU 资源,采用变速率采样方式对共享资源进行动态分配也是常见的。由于共享网络资源,有限的系统带宽以及多个控制回路信道容量的差异是网络控制系统采用变速率采样方式的原因之一 ;另外,对网络控制系统共享 CPU 计算资源的优化也是促使系统可能采用变速率采样方式的另一个原因。这两种方式均会导致 NCS 对数据采样和任务计算时间的分配不是等间隔或是周期性的。
Velasco 等采用了一种增广状态变量的方法,用带宽管理的方式来动态计算回路的采样周期,在每个采样周期中随着状态变量的更新,每个控制回路的带宽也随之进行了动态更新[9]。随后,作者又将优化带宽分配策略应用到采用 NCS 分布式结构的多关节机器人,从而提高了系统的控制性能和跟踪能力[10]。文献 [11] 采用了基于神经网络的反馈调度器对各个回路的采样周期进行动态调整,以适应负载的变化,同时提高了网络利用率。文献 [12] 采用 PID 算法对各个控制回路的采样周期进行动态调整,同时结合更大的绝对误差累计积分赋予回路更高优先级的方法,使得网络在高利用率的基础上有更好的控制性能。
提出的模糊带宽管理 ( fuzzy bandwidth management,FBM)方法,是通过一种基于一维输入输出映射关系的模糊逻辑调节器来动态管理 NCS 各个控制回路的网络带宽。同时用线性矩阵不等式(LMI)方法获得各个控制回路的带宽变化范围,以保证系统的稳定性。通过定义多回路归一化控制质量和归一化带宽需求度性能衡量指标,来说明带宽动态管理的有效性。
《2 模糊带宽管理策略》
2 模糊带宽管理策略
《2 .1 问题描述与系统结构》
2 .1 问题描述与系统结构
传统的带宽分配技术是基于已知或假定通信网络负载情况下的静态策略。如文献 [4~7],当采样周期按照某种调度算法确定下来,在系统运行期间是不能改变的。这种预定的固定分配方法在不可预见的运行环境下(如负载变动、变发扰动等)可能会导致系统性能的恶化甚至不稳定。文献 [13] 采用 QoS 管理器对并行网络控制系统的各个控制回路的采样周期进行了动态管理,但它的 QoS 管理器是网络上的一个主节点,通过对各个回路的数据进行收集并按采样周期调度算法对各个回路的采样时间进行刷新。显而易见,该调度节点将增加系统的通信负担。采用 FBM 方法无需添加专用调度节点,它的系统结构图如图 1 所示,控制系统共有 N 个回路,其中控制器和执行器节点采用事件驱动,传感器节点采用时间驱动,采样间隔系列 hi 为有限步的周期性序列,即 i = 1,2,…,m 为一个有限数。假设信息均以单包传送并且都能在一个采样周期内完成(如截止期等于采样周期),并且实时网络能在每个截止期内均能完成对控制回路的带宽分配。第 i 个控制回路的被控对象可用如下状态方程描述 :

《图1》

图1 基于模糊带宽管理的多回路 NCS 结构图
Fig.1 The multi-loop of NCS based on fuzzy bandwidth management
FBM 方法通过对带宽的动态管理试图使 NCS 全局性能得到优化的同时节省受限的网络资源。带宽管理器(BM)在不占用网络资源的情况下按照全局可用带宽 Ba 和每个控制回路的状态反馈在控制算法运行的同时得到该回路的下一个采样周期。
假设每个回路完成信息传送所需的时间为 ci(包括传感器到控制器和控制器到执行器的传输时间),则第 i 个回路的采样周期 hi 和信道带宽 bi 的关系为[10]

假设 ci 固定,从式(2)中可以看出,采样周期和信道带宽互为反比,因此描述系统带宽可以用采样周期来替代,反之亦然。为不失一般性,假设系统的平衡点为原点,定义第 i 个控制回路的误差 ei 为该回路 n 维可观测向量 xi = ( xi,1,…,xi,n )T 在向量空间 Rn 中的 Euclidean 范数为

当控制系统趋向平衡点时,系统误差越小。BM 是通过模糊逻辑调节器来实现,它由一维输入 ei 经模糊化、基于规则库的模糊推理和解模糊后得到下一个采样周期(控制回路带宽)。它对各个控制回路的带宽动态分配的基本原则是在某个控制回路的误差较大时,也即受到扰动时赋予较大的带宽(较小的采样周期)以提高系统的控制性能 ;当某控制回路的误差较小(近平衡点)时赋予较小的带宽(较大的采样周期)以节省网络资源。
《2 .2 基于模糊逻辑的带宽管理器》
2 .2 基于模糊逻辑的带宽管理器
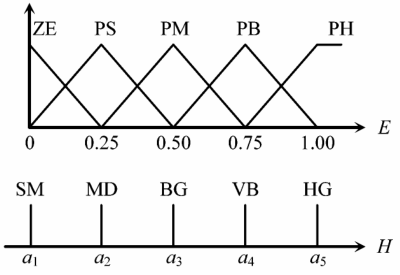
当文献 [14] 的基于“1D — 3D”映射关系的、最佳一维模糊系统的三个互不线性相关的 Fuzzy P 论域和规则库取相同时,该形式简化为一维输入输出映射关系的模糊系统。一维模糊系统没有多维模糊系统的功能缺陷[15],但使输入与输出呈现出一种非线性增益关系。FBM 策略是基于一维输入输出映射关系的模糊逻辑调节器来实现,它的输入输出隶属度函数和模糊规则表如图 2、表 1 所示,其中将输入的论域做归一化处理,输入变量 E 是控制回路的误差 ei 经模糊化后得到的,H 为输出变量。
《图2》
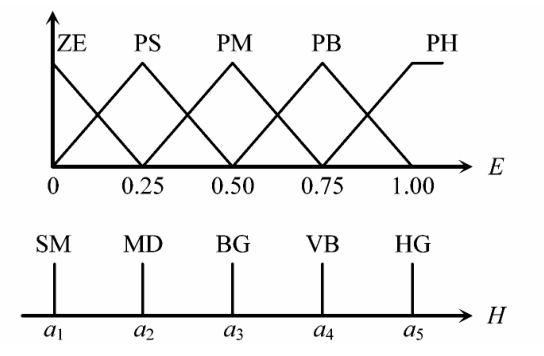
图2 输入变量 E 和输出变量 H 隶属度函数
Fig.2 The membership function of E and H
《表1》
表1 模糊规则表
Table 1 Fuzzy rule base

控制规则为 :Else [ if E is Ai then H is Bi ]。其中 Ai 和 Bi 分别为输入和输出的模糊集,输入模糊集为{ZE,PS,PM,PB,PH},输出模糊集为{SM,MD,BG,VB,HG}。通过基于规则库的模糊推理后,解模糊运算由

确定。输入模糊子集的隶属度函数表达式为

a,c,b 分别确定三角形隶属度的两脚和顶峰。ai 满足 Bi ( ai ) = 1,由下式确定 :
式中 η 为非线性偏移因子,由于 a2 > a1 及 a5 > a4,故 η ∈ (( hmin - hmax )/( hmax + 3 hmin ),( hmax - hmin )/(3 hmax + hmin ))。hmin 和 hmax 分别是各自控制回路允许的最小和最大的采样时间,易得 h(k)的值域为[ a1,a5 ]。从式(4)中可以看出,基于模糊逻辑的带宽管理满足带宽管理器的基本原则,同时不同的 η 将影响控制回路的带宽动态分配及系统的控制性能。由于该算法实现简单,不占用额外的网络带宽,在控制算法执行过程也同时完成了对各个控制回路的带宽分配,而额外占用 CPU 资源极小。
《2 .3 带宽动态管理的上下界》
2 .3 带宽动态管理的上下界
在反馈控制系统中,信息应该在一个采样时间内得到传送并保持系统的稳定性是很重要的。在很多应用场合,在允许范围内较小的采样周期能提高系统的控制性能,但当采样周期增大至一个确定的上界时,虽然系统性能有所下降但还能保证系统稳定,这个上界称之为最大允许时延 (maximum allowable delay bound,MADB)[8]。通过寻求 MADB 来保证 NCS 的稳定性[16,17],并且寻求一种网络调度策略来减少网络诱导时延是有必要的。网络诱导时延一般与网络的结构和协议有关,而 MADB 从对象的模型中获得,与网络的协议无关,因此可以将获得的 MADB 作为网络控制系统中最大采样周期的上界[8,18~20]。
当控制系统采用状态反馈律控制( u = -Kixi )时,式(1)可写成一般形式 :

式中 Mi = -BiKi, 为系统的初始状态,τi =
为系统的初始状态,τi = 分别为第 i 个控制回路信息从传感器到控制器、控制器到执行器的传送时间和控制器的执行时间。
分别为第 i 个控制回路信息从传感器到控制器、控制器到执行器的传送时间和控制器的执行时间。
为了求得保证系统稳定条件下的每个控制回路的最大采样间隔,引入以下引理。
引理 1[21] 假设 
 均定义在域 Ω 上,对于任何矩阵 X ∈
均定义在域 Ω 上,对于任何矩阵 X ∈ ,不等式
,不等式

成立,且 X,Y,Z 满足 。
。
定理 1 对于给定的第 i 个回路的采样间隔 hi > 0,若存在 Pi > 0,Qi > 0,以及 Xi,Yi,Zi 满足
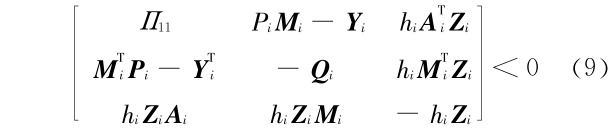
其中

则方程式(7)所描述的 NCS 是渐近稳定的。
证明选择 Lyapunov 函数
V( x( t - α ),α ∈ [ 0,τi,max ]) = V1+ V2 + V3,
其中

由牛顿 - 莱不尼兹公式
 可得
可得

对于 α ∈ [ t - τi,t ],定义 a(α ) = x(α ),b(α )=  ,N = PiMi,应用引理 1 得
,N = PiMi,应用引理 1 得


当 Ω < 0 时,由 Lyapunov-Krasovskii 稳定性理论,系统渐近稳定。再由 Schur 补定理即可得式(9)。证毕。
第 i 个控制回路在保证系统稳定的前提下占用最小带宽(最大采样周期 hi,max ),可以通过定理 1 用 LMI 方法以迭代形式从 hi 中求得。
在 NCS 中,采样周期越小时,数据包增多将可能导致系统性能恶化。第 i 个控制回路可占用最大带宽由

计算,式中 Ba 为各个控制回路总的可用带宽。因此可用

确定第 i 个控制回路的最小采样周期( hi,min ),通过式(9)、式(11)可以确定式(6)的 a1 和 a5 的值,也即确定了保证系统稳定条件下带宽动态分配的范围。
《3 用 QoC 和 RoB 管理来优化 NCS 性能》
3 用 QoC 和 RoB 管理来优化 NCS 性能
每个控制回路的控制质量(quality of control,QoC)可以用误差泛函积分评价指标来衡量,它是以控制系统的瞬时误差函数 e(t)为泛函的积分评价,包括 IE,ISE,ISTE,IAE,ITAE 等,采用常用的 IAE 指标来衡量[22],第 i 个控制回路的 IAE 为

式中 ωi 是根据各个控制回路的重要性赋予不同的权重系数,经离散后得

式中 hi (k)为第 i 个控制回路的采样周期,IAE i ( e : )表示第 i 个控制回路在随机网络时延序列 下而产生的绝对误差累积值。每个控制回路会因网络时延序列和随机扰动的不确定性而导致性能好坏不同,故某个回路的控制性能并不能反映整体 NCS 系统性能,系统整体性能与每一个控制回路的性能相关联。为了反映共有 N 个回路的NCS 的控制性能,文献 [22] 定义了单回路的归一化控制质量计算公式,但该式只能应用于网络诱导时延有界且可测量的 NCS,如在控制器和执行器集成的 NCS,则 τca = 0,τca 可测。当在某些协议中网络诱导时延中部分参数不可测时,可将该回路的控制性能与无网络环境( τi = 0)时最好的控制性能和任务均遇截止期(τi = Di )时最差的控制性能进行比较,定义多回路归一化控制质量(QoC)衡量指标为
)表示第 i 个控制回路在随机网络时延序列 下而产生的绝对误差累积值。每个控制回路会因网络时延序列和随机扰动的不确定性而导致性能好坏不同,故某个回路的控制性能并不能反映整体 NCS 系统性能,系统整体性能与每一个控制回路的性能相关联。为了反映共有 N 个回路的NCS 的控制性能,文献 [22] 定义了单回路的归一化控制质量计算公式,但该式只能应用于网络诱导时延有界且可测量的 NCS,如在控制器和执行器集成的 NCS,则 τca = 0,τca 可测。当在某些协议中网络诱导时延中部分参数不可测时,可将该回路的控制性能与无网络环境( τi = 0)时最好的控制性能和任务均遇截止期(τi = Di )时最差的控制性能进行比较,定义多回路归一化控制质量(QoC)衡量指标为
其中,
 ) 表示为控制回路在无网络环境下和任务均遇截止期情况下的绝对误差累积总和。由该式可知,QoC( e : ∈ [ 0,1 ],该数值越大,表明整个 NCS 控制系统性能越好。
) 表示为控制回路在无网络环境下和任务均遇截止期情况下的绝对误差累积总和。由该式可知,QoC( e : ∈ [ 0,1 ],该数值越大,表明整个 NCS 控制系统性能越好。
同样地,多回路归一化带宽需求度(requirement of bandwidth,RoB)衡量指标定义为

式中  为第 i 个控制回路的消息传送时间,
为第 i 个控制回路的消息传送时间, ,
, ,
, 分别表示第 i 个控制回路的第 k 次采样周期、该回路的最小和最大采样周期。从式(15)可知,RoB(
分别表示第 i 个控制回路的第 k 次采样周期、该回路的最小和最大采样周期。从式(15)可知,RoB( ) ∈ [ 0,1 ],在保证系统稳定的前提下,采样周期越大,带宽需求越小,该项指标就越小,表明系统在网络资源受限的情况下对带宽的需求程度越低。
) ∈ [ 0,1 ],在保证系统稳定的前提下,采样周期越大,带宽需求越小,该项指标就越小,表明系统在网络资源受限的情况下对带宽的需求程度越低。
由于误差的大小直接反映了各自回路的 IAE 的大小,因此根据误差的大小对各个控制回路的带宽进行模糊动态管理,能使 NCS 的控制质量得到改善的同时降低系统对带宽的需求,使控制系统的总体性能得到进一步的优化。
《4 性能评价》
4 性能评价
《4 .1 仿真设置》
4 .1 仿真设置
考虑一个 N = 3 的网络控制系统,每个回路采用相同的球杆控制系统为被控对象,其状态空间表达式为

其平衡点为原点,仿真在基于 Matlab/TrueTime 上实现。为了反映网络的资源限制,设置了一个具有高优先级的干扰节点,以随机相互独立方式向网络发送数据包,它占用 70 % 的带宽,3 个回路总的可用带宽 Ba = 30 %。3 个控制回路的权重系数 ωi = 1,并且每个控制回路以不同的时间间隔对被控对象施加随机扰动使小球脱离原点后重新回到平衡位置。控制器按无网络情况下采用 LQ 最优控制设计,此时 K = [ 0.591 61.238 2 ],按式(9)求得保证系统稳定条件下的最大采样周期 hi,max = 0.5 s。最小采样时间发生在 N 个回路中只有其中一个控制回路产生随机扰动的时刻,由式(10)、式(11)得 hi,min = 0.285 7 s。
为了说明控制质量和带宽需求度的改善程度,采用 FBM 与采用传统的固定带宽分配(fixed bandwidth allocation,FBA)[9,10]方法进行比较。由于控制回路采用相同的被控对象,FBA 方法则使 3 个控制回路总是完全地均等共享可适用带宽。为了得到各种可能的干扰情况以便于统计,仿真运行了 1 h。
《4 .2 性能分析》
4 .2 性能分析
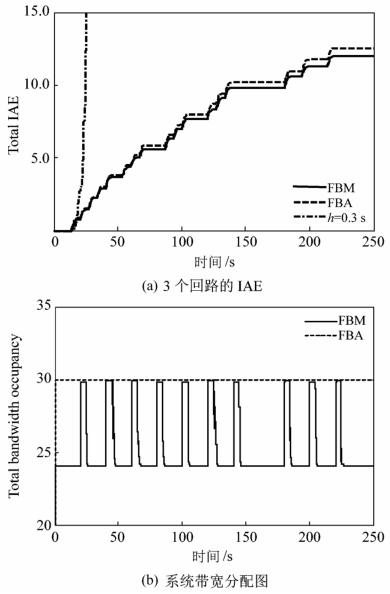
当对每个回路的被控对象各施加一个间隔为 20 s 的随机干扰(连续的随机干扰间隔可能是 20 s,或许更长),3 个回路的绝对误差累积总和及系统带宽占用情况如图 3 所示(取运行时间的一部分)。由图 3(a)可知,采用 FBM 的系统绝对误差累积值总是小于采用 FBA 的系统绝对误差累积值。当 3 个回路采用 FBA 方法运行在较小的采样周期( h = 0.3 s)时,系统所需总的带宽超出了网络资源限制条件而使系统急速趋于不稳定状态。图 3(b)是图 3(a)相应的带宽分配图,从图 3(b)中可以看出,FBA 方法由于使系统的带宽平均完全共享,故它始终处于可用带宽 Ba = 30 % 处,而 FBM 根据模糊规则使系统的带宽在一定范围内进行动态分配,当 3 个回路没有扰动发生时采样周期均处于最大的允许值,此时占用带宽为 24 %,当有一个或多个回路产生扰动时,FBM 方法对带宽进行及时调整,但不会超出带宽资源的限制。
《图3》


图3 NCS的 IAE 和带宽分配图
Fig.3 The total IAE and bandwidth allocation in NCS
图 4 是按式(14)、式(15)得出的多回路归一化 QoC 和归一化 RoB 性能评价图。从图 4(a)中可以看出,对于不同时间间隔的随机扰动,采用 FBM 的控制质量总是优于 FBA 的控制质量。当式(15)中最小采样周期取固定带宽的周期时,该式具有了以固定带宽分配为参照的相对归一化带宽需求度的含义,如图 4(b)所示。采用 FBA 由于完全均等利用了带宽资源,故它的带宽需求度始终是 100 %,而采用 FBM 在不同的随机扰动间隔下,它的带宽需求度总是低于 FBA 的带宽需求度。另外,随着随机扰动间隔增大,带宽需求度越小,这是由于系统受到扰动减少而处于平衡位置的时间增多的情况下,采用 FBM 方法节省了更多的资源空间,这在带宽受限的情况下使其他节点的受益是非常可观的。
《图4》

图4 NCS在不同的随机扰动间隔下的 QoC 和 RoB
Fig.4 The QoC and RoB of NCS in different stochastic perturb interval
当式(6)中的非线性偏移因子 η 在允许范围内取不同的值时,对系统的控制质量和带宽需求有不同的影响,如图 5 所示。其中图 5(a)是 NCS 在[ 10 s 100 s ]的随机扰动间隔作用下连续运行 1 000 s 所得到的 η 和 QoC,RoB 的关系图。由于网络诱导时延和随机扰动间隔的不确定性,在一些观测点之间存在着波动,但对系统控制质量总体上呈现一种增大的趋势,而相应的带宽需求度逐渐降低。因此,在系统的控制质量和带宽需求这两者折衷考虑下,非线性偏移因子 η 取值的较佳范围是 0.05 ~ 0.1。图 5(b)中是在不同时间间隔的随机扰动情况下,非线性偏移因子 η 分别取 -0.1,0,0.1 时的控制性能(CP)和带宽需求(BW)的性能改善图,它是相对于采用固定带宽分配情况下性能改善的百分比。从图 5 中可以看出,当非线性偏移因子逐步增大时,控制性能和带宽需求相对于采用固定带宽情况总体上均有不同程度的改善。这是由于不同的非线性偏移因子使得基于一维模糊推理的非线性关系对系统控制回路带宽分配的紧急度不同所引起的。这样可以根据系统需要选择适当的 η 值,从而在总体上进一步优化系统的控制性能和带宽需求。
《图5》
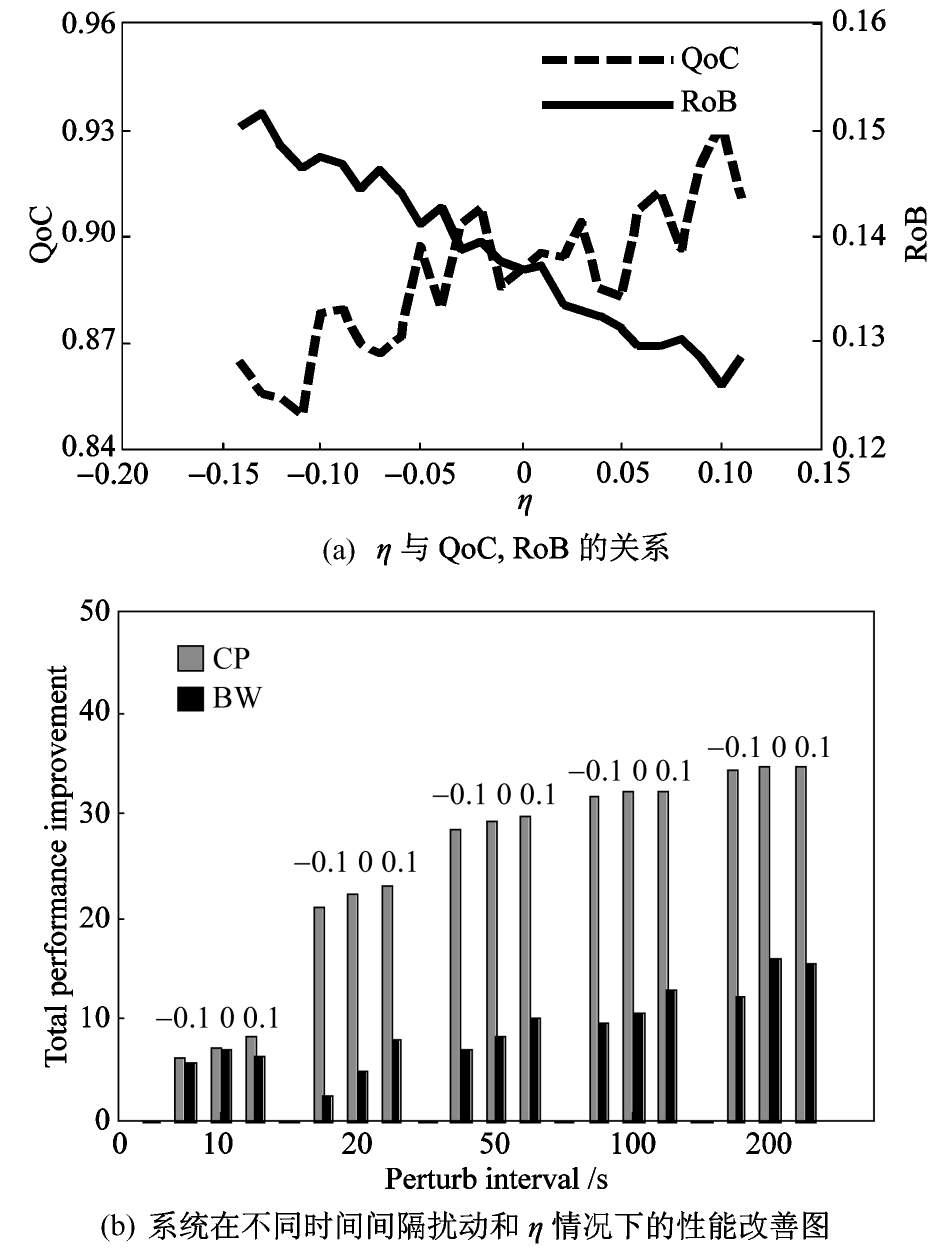
图5 η 对系统性能的影响
Fig.5 The relationship between performance and η
《5 结语》
5 结语
实际网络控制系统一般在 CPU 资源和(或)网络带宽受到一定限制的情况下运行。在网络带宽受限的情况下,设计了一个基于一维模糊推理的非线性关系来动态管理系统的网络带宽,并给出保证系统稳定的动态分配带宽的上下界。同时定义了多回路归一化控制质量和归一化带宽需求度性能衡量指标,以此来评价模糊带宽管理方法和固定带宽分配方法的各项性能指标。结果表明,在结合非线性偏移因子的调整下,采用的模糊带宽管理方法的控制质量和带宽需求度均优于固定带宽分配方法的相应指标。这种带宽动态管理方法在改善系统控制性能的同时能有效地节约受限的网络资源,对实际工程应用是非常需要的。











 京公网安备 11010502051620号
京公网安备 11010502051620号




