


矿山机械强调以人为本的设计理念, 改变矿山机械傻、大、笨、粗的外观形象, 降低其工作过程中的噪声和振动, 实现其操作与控制系统的人性化, 基于安全及乘坐的舒适性设计等, 是矿山机械设计与开发过程中必须注重的基本理念。
相对以满足功能为主的传统设计方法, 笔者提出了矿山机械的以人机工程学为第一, 以人为本, 从尊重人出发, 使用户满意, 操作司机满意, 乘坐人员满意和它周围工作人员都感到满意的设计新理念, 并以液压提升机为例, 就矿山机械的外观形象、降低噪声、操作与控制系统、安全性、乘坐舒适性等设计内容的分析与探讨, 这也目前矿山机械研究者与生产厂家的当务之急。
《1 改变矿山机械的形象》
1 改变矿山机械的形象
大多数矿山机械均为大功率复杂机电液一体化产品, 外形结构复杂, 傻、大、笨、粗, 带棱带角, 使人产生压迫感而无法接近。因此, 从以人为本的角度出发, 矿山机械的设计要讲究造型, 尽可能设计成圆弧和曲线组成的平滑圆润体, 使其有不俗的外貌;尽管矿山机械的使用环境恶劣, 如煤矿井下, 但也要注意其外观色彩设计、使用与环境协调和匹配的色彩, 使矿山机械具有一些“绅士”风度;更要注意矿山机械外表的清洁, 这就要求矿山机械液压传动与控制系统具有良好的密封性, 注意环境卫生的改善与设备的维护保养。当然, 但要达到这些要求并不容易, 必须在设计、加工制造、使用维护等过程中付出艰辛的劳动与努力。
《2 降低噪声和振动》
2 降低噪声和振动
在影响矿山生产环境与人体身心健康的各种因素中, 矿山机械的振动噪声是最恶劣的影响因素之一, 噪声对人的中枢神经系统、心血管系统、消化系统、呼吸系统和视觉器官均产生不良影响, 研究表明, 在超过85 dB (A) 的噪声作用下, 人的大脑皮层质的兴奋和抑制失调, 导致条件反映异常, 出现中枢神经系统功能障碍, 表现为头痛、头晕、失眠、多汗、恶心、乏力、心悸、注意力不集中等一系列症状。噪声还会引起心律不齐、心电图改变等对心血管系统的慢性损伤作用, 引起胃的收缩机能和分泌机能降低等消化系统疾病, 引起呼吸加快、加深等呼吸系统问题, 引起眼睛对光的敏感性降低、妨碍听觉信息的感知
矿山机械产生噪声的原因多种多样, 如发动机噪声, 系统振动噪声, 液压系统溢流噪声等, 降低机器噪声与隔离噪声源都是降低矿山机械噪声对人身心健康危害的有效措施, 如煤矿井下使用的液压提升机, 其噪声主要存在于提升主机之中, 据此, 目前液压提升机的主机多采用隔离洞室的办法控制噪声, 以确保噪声源与提升司机及有乘坐舒适性要求的提升容器之间有一定距离
振动是矿山机械产生噪声及引起司乘人员不舒适的重要原因, 人体可视为一个多自由度的振动系统, 有其自身的振动频率, 表1为人体不同器官的共振频率, 当外界振动频率接近器官的共振频率时, 即产生共振, 振幅迅速增大, 引起人体很大的生理反映。实验研究表明, 人体对4~8 Hz的振动感觉最敏感, 为人体的第一共振峰, 10~12 Hz的振动为第二共振峰, 20~25 Hz的振动为第三振峰, 随着振动频率的增高人的生理效应减弱。
表1 人体各部位的共振频率 Table 1 Main parts resonance freguency of human body
《表1》
| 器官名称 | 共振频率/Hz | 器官名称 | 共振频率/Hz |
| 胸腔内脏 | 4~8 | 手 | 30~40 |
| 脊柱 | 30 | 神经系统 | 250 |
| 眼 | 15~50 | 鼻窦腔、鼻、喉 | 1000~1500 |
| 关节 | 2~30, 500~1000 | 上下颌 | 6~8, 100~200 |
液压提升机提升容器的振动对乘坐舒适性影响很大, 提升容器的弹性振动主要发生于提升机启动或制动过程中, 在等速运行过程中由于各种其他扰动, 如容器阻力的变化, 滚筒的偏心及在装载、卸载过程中可能发生的程度不同的振动。在液压提升机加速启动与减速停车过程中, 由于液压驱动系统激励加速度的作用, 提升钢丝绳系将产生振荡, 提升容器产生纵向振动
由于液压提升机的绳系为一大弹性系统具有很大的阻尼减振作用, 其提升容器振动频率一般为第三振峰频率以上, 因此振动的作用不是影响乘坐舒适性的主要因素。但对其加速启动与减速停车过程中的加减速度曲线上二次谐波分量 (振动频率约4 Hz左右) 必须予以足够的重视, 因为它是人体纵向振动的敏感频率, 一旦存在会引起人体乘坐不舒适。
因此, 矿山机械的开发与设计中, 必须针对各种可能的噪声与振动源开展研究, 尽可能降低振动与噪声。
《3 操作与控制系统革命性设计[7,8,9,10]》
3 操作与控制系统革命性设计[7,8,9,10]
目前国产矿山机械的自动化程度偏低, 工人操作劳动强度大, 而且对操作技术要求较高, 据统计, 培养一个熟练的矿山机械操作工至少1年时间, 如培养一个高水平的液压提升机司机需要2~3年, 这是因为液压提升机作业动作多, 提升容器平层精度要求高, 尤其在减速过程中, 提升绳系的振动、钢绳中的动张力大小、乘坐舒适性等都与司机操作水平相关。提升司机在操作过程中, 右手控制操作手把, 左手操制动手把, 随时准备踩踏动力制动踏板, 实现紧急制动;启动时眼睛要三看, 即启动时看信号、提升方向和滚筒上钢丝绳排例情况;运行时看操作台上的各种仪表、深度指示器;停车时看深度指示器、耳朵听启动提升电铃信号, 运行中注意听提升机运行的声音是否正常等。在一个短短的提升循环时间内, 提升司机的手、脚、眼和耳都要工作, 遇到异常现象脑子还要反应快, 采取措施快, 这是一种紧张复杂的操作过程, 使提升司机容易疲劳。因此, 矿山机械的设计中, 除应尽可能进行操作系统的人性化设计外, 还要尽可能实现矿山机械操作与控制系统的自动化。
操纵台是提升设备的控制中枢, 提升机多采用直柜式斜面操纵台, 人以坐姿进行操作, 操纵台的水平台面上布置有制动手把、操纵手把、按钮开关、旋钮开关;倾斜台面上有电压表、电流表、压力表、信号灯、深度指示器;下部有动力制动踏板、安全制动脚踏开关。对操纵台的人机工程设计主要包括操纵尺寸和各种仪表、开关、信号灯及手把安放位置的确定等。
人坐姿作业时, 手臂的平面作业范围如图1所示, 双手动作的最好方向是左右各侧30°, 图示是操作台上的手把、开关应布置在上述的最佳范围内。
人的眼睛最佳注视范围为左右60°, 上下30°, 在此范围内眼球不必频繁转动观看物体, 就不容易引起视觉疲劳, 因此, 操作台上的各种仪表、灯光信号最好集中布置在人眼左右60°, 上下30°的范围内, 而且与司机观看顺序一致, 从左到右或由上到下排列。
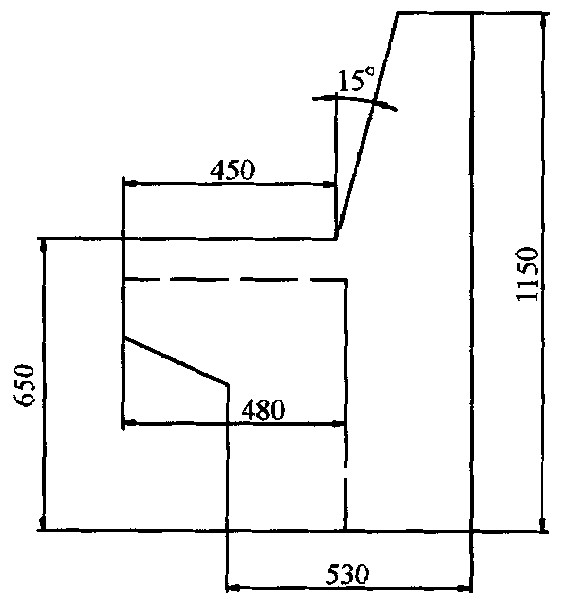
人坐姿用脚操纵踏板控制器时, 最适宜的操作条件是, 输出力小于300 N, 动作时, 两脚叉开的角度不大于15°, 螵关节的角度是90°, 大小脚间夹角为160°。据此, 形成提升机操作台的尺寸如图2所示。
因此, 像矿山机械这类设备必须进行操纵技术革命, 采用自动控制。从控制理论角度来讲, 液压提升机的液压系统是典型的非线性、变载荷、变参数的系统, 目前, 防爆液压提升机控制系统主要是容积调速控制, 即司机操纵控制阀向比例油缸输入逐渐变化的压力油, 比例油缸位移控制伺服阀阀芯位移, 伺服阀又通过差动油缸控制摆动缸体, 改变变量泵的斜盘倾角大小, 改变液压泵输出流量的大小和方向, 进而改变液压马达的速度大小和旋转方向, 实现对提升箕斗或罐笼的升降。
《4 安全性设计[13,14]》
4 安全性设计[13,14]
矿山机械的安全可靠性是矿井安全生产与司乘及工作人员生命安全的重要保证。矿山机械的安全特性应从两方面进行描述, 一是矿山机械的安全功能, 另一是相应安全功能的安全可靠性。不论是在含煤尘和易燃、易爆气体的煤矿井下或井口, 还是在各种金属、非金属矿山, 只有矿山机械具有齐全的安全功能与较高的安全可靠性, 才能确保矿井生产正常进行, 避免安全事故的发生。
各种矿山机械的安全功能因工作环境不同而不尽相同, 就煤矿井下使用的提升机而言, 其安全功能主要有防爆、超速及过卷保护、过载过压保护、防坠保护等。随着电控防爆与液压防爆技术的发展及各种防爆新理论、新元器件的出现, 各类提升机的防爆问题在设计上已不是主要问题。
《4.1防爆》
4.1防爆
在含煤尘和易燃、易爆气体的煤矿井下或井口环境中使用的提升机都有防爆要求, 液压提升机电控系统与电控式提升机电控系统相比相对简单, 防爆问题更易解决, 因为液压提升机由液压系统来实现矿井负载的提升与下放及其速度控制与调节, 驱动其主辅助油泵的电动机只需朝一个方向旋转, 不像电控式提升机那样电机有正反转要求;液压提升机的主辅助油泵为空载启动, 启动设备可更为简单;两液压泵的起动顺序是先起动辅助油泵, 再起动主液压泵, 其相应电机的磁力起动可利用控制回路中继电器的辅助触点联锁。
液压提升机电气控制系统主要采用隔爆型或安全火花型电气设备, 常用的防爆元器件有防爆自动馈电开关、鼠笼型防爆电机、防爆磁力启动器、防爆电磁阀、防爆干式变压器、防爆检漏器、防爆行程开关及防爆电铃等。
《4.2超速及过卷保护功能》
4.2超速及过卷保护功能
液压提升机在工作过程中尤其是在下放负载过程中, 容易发生跑车超速, 当跑车速度超过额定速度15%时, 系统必须自动断电, 以防机械或液压元件损坏和避免诱发重大安全事故。
图3为常见的机械式离心超速保护装置结构示意图, 安装在液压提升机主轴上, 内齿圈6与主轴相联, 将主轴转速输入超速保护装置, 内齿圈6与轴齿轮5构成超速保护装置增速装置。通过增速后, 轴齿轮5带动旋转体高速旋转, 在离心力的作用下, 离心块3被甩出, 并通过杠杆4推动顶杆2;主轴转速越高, 顶杆被推动的距离越大, 当主轴速度超过额定速度15%时, 顶杆触动超速保护行程开关1, 使它的接点断开, 使主油泵电机断电, 液压制动器紧急制动, 液压提升机停机。
《图3》
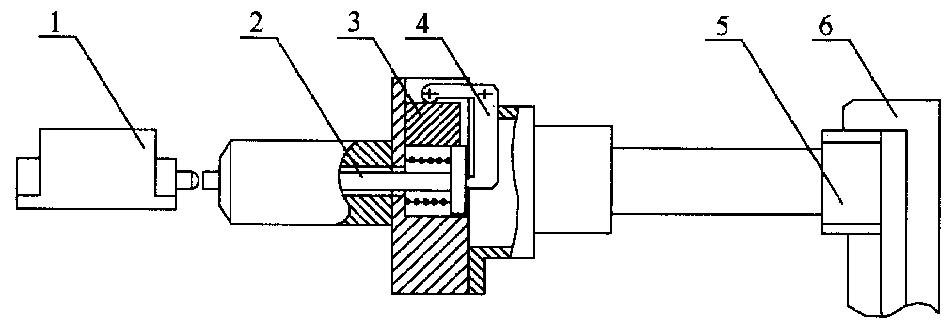
图3 液压提升机超速保护装置 Fig.3 Overspeed protective controller forhydraulic hoister
1—行程开关;2—顶杆;3—离心块;4—杠杆; 5—轴龄轮;6—内齿圈 (与主轴相联)
电气超速保护装置由测速发电机、速度指示器及速度开关组成, 实现超速保护。提升容器的提升高度超过限定位置 (即过卷) 时, 提升容器和深度指示器顶开安装在深度指示器顶部的过卷行程开关, 行程开关失电使液压提升机停电抱闸制动, 反向重新启动时, 必须反向扳动转速开关, 控制液流换向使提升容器下降。
《4.3高低压保护》
4.3高低压保护
在液压主回路中设置有高低压保护回路, 当液压系统工作压力升高超过正常工作台压力1.2~1.25倍时, 高压溢流阀开启, 液压油经高压安全阀、单向阀流入主回路的低压侧管道, 此时液压系统压力不会继续升高, 液压马达带不动过重的负载, 提升机自动停机。若辅助补油系统的补油压力过低, 低压保护压力继电器动作, 切断电源, 提升机也会自动停机, 且信号灯亮, 报警铃声报警。
此外, 当提升系统存在故障时, 提升机不能启动;运行中发生故障时, 系统能中途自动停机, 并紧急制动, 同时信号指示灯警示故障发生;闸瓦磨损过大, 负载在减速点未减速, 液压系统油温过高、油位过低, 系统都会停转并制动, 信号灯亮, 报警铃发声报警, 在紧急制动情况下, 司机脚踏制动开关 (ES) , 使提升机紧急停车, 并断开控制电源;一旦在提升或下降负载时出现断绳现象, 安装在提升容器两侧的防堕器会紧急抱紧罐道实现强制停车, 这些都是提升机实现其安全功能的保证措施。
《5 乘坐舒适性设计》
5 乘坐舒适性设计
对以载人为主的运输机械, 都有乘坐舒适性的基本要求, 对水平或小坡度运行的运输机械, 其乘坐舒适性与路轨的情况关系很大, 但以垂直运行的提升机械的乘坐舒适性则主要取决于机械本身。
乘坐舒适性实际上就是人员乘坐提升机时的综合感受, 人是一个在各种功能之间具有层次结构和多重反馈机构的有机统一体, 通常用五官感受环境, 舒适环境是一个包括装璜艺术在内的极其复杂的问题, 它涉及人的生理和心理等诸多方面。人们对提升机的运动尤其是垂直升降运动特别敏感。垂直运动的某些运动参数超出一定范围, 便会有明显的不舒适感, 一部分人甚至会有生理反应。提升机的乘坐感觉与上下工作人员的生理状态、心理状况等有关, 人们往往将上浮感、下坠感、不稳定感统称为不舒适感, 上浮感由向下的运动加速度产生, 下坠感由向上的加速度产生。影响液压提升机乘坐舒适性的因素包括振动、运行加减速度、噪声、照明、色彩和温湿度等因素。液压提升机的提升绳系是大弹性钢丝绳系统, 具有很大的阻尼减振作用, 且主机洞室 (噪声源) 与提升容器间有一定距离, 而在矿井生产这种噪声大、空气质量差等恶劣环境条件下, 过分强调提升容器的噪声、照明、色彩和温湿度等对乘坐舒适性也不完全合理。因此, 笔者认为影响液压提升机乘坐舒适性的主要因素是提升容器的加速度及加速度变化率
考察提升机的舒适性及运动效率, 通常用提升机的速度曲线、加速度曲线及加速度变化率曲线来表达。以往应用较多的是速度关于时间的二次函数曲线, 这类速度函数计算比较简单, 可以基本满足舒适性要求, 而且运动效率也较高。在舒适性要求更高的电梯设计中, 往往规定其加 (减) 速度对时间的变化曲线必须连续, 不能有突变, 常用的加、减速度曲线有正弦函数和余弦函数曲线。
矿山使用的提升机机械, 主要有机械电控式提升机与液压提升机两种, 虽然它们的提升绳系结构完全相同, 但其确保乘坐舒适性的控制方式是完全不同的。一般而言, 液压驱动系统的输出加速度即为绳系的激励加速度, 在此激励加速度的作用下, 提升绳系将不断振荡, 卷筒制动后, 提升容器仍将由制动瞬间的振荡初值以一定的衰减速度振荡。激励加速度不同, 提升容器振荡情况就不同。研究表明, 当提升机卷筒激励加 (减) 速度为如下函数时:
式中a0为提升机平均运行加速度, T0为加减速时间。钢丝绳系的动态冲击很小, 提升容器无加速度冲击, 且能满足振荡加加速度曲线连续、没有突变的舒适性基本要求。但司机的手动操作具有较大随机性, 难以确保准确产生所需要的加速度的函数, 所以实现液压提升机的计算机控制势在必行。调整液压系统结构、实现自动控制程度更高、安全可靠性更好、运行效率更高、满足乘坐舒适性要求的高品质液压提升机是近几年液压提升机的主要发展趋势
《6 结语》
6 结语
我们必须清醒地认识到, 21世纪的矿山机械必须考虑与人和环境的协调, 在产品的设计中贯彻人机工程学的原则, 采取必要的技术措施进行安全性设计, 降低振动与噪声, 改善井下生产作业环境, 提高乘坐舒适性。有我们多年来设计、制造与使用维护所积累的经验, 对开发与人、环境协调的矿山机械是完全可能的;同时改变现有矿山机械的简单手动操作与控制方式, 而实现以数字PID控制、自适应控制、模糊控制、神经网络控制或它们的复合计算机自动控制, 实现操作与控制系统革命, 这也是近几年矿山机械的发展趋势。











 京公网安备 11010502051620号
京公网安备 11010502051620号




