《1 前言》
1 前言
为了应对战场日益复杂的电磁环境,提高雷达的目标信息获取能力,现代雷达体制正在向高分辨力发展。已经证明,分辨力的改善有助于提高雷达的目标检测性能,并使雷达具备成像和目标识别能力,从而使雷达性能得到全面提升[1]。常见的高分辨雷达体制有很多种[2],在精确制导领域,步进频率信号因能实现较高的距离分辨力而得到了广泛的应用。这种体制雷达对开发制导雷达,特别是弹载制导雷达的功能,改善其在杂波背景下的目标检测、跟踪与识别性能有着独特的优势。步进频率体制雷达通过多脉冲相参合成处理来获得距离高分辨力,也就是对 N 个脉冲混频后的结果进行 IDFT 处理,距离分辨力可以提高 N - 1 倍。但是,基于 IDFT 的一维距离像算法有以下的缺点:由于强散射中心副瓣(或噪声) 的影响,可能会出现虚假的散射中心[3],并且散射中心受固定距离分辨力的限制[4, 5]。Prony 算法用指数函数的线性组合来描述等间距采样数据,为分离不同散射中心提供了可能[6]。笔者将扩展的 Prony 算法应用到高分辨雷达多目标检测(或多散射中心)中,并进行了建模分析。通过理论分析和实验仿真证明,Prony 算法能得到更为精确的目标信息。
《2 多散射中心的步进频率雷达信号》
2 多散射中心的步进频率雷达信号
根据距离分辨力  (B =
(B =  ) 是发射信号带宽,c 是电磁波传输的速度),提高雷达距离分辨力是以增大信号带宽为代价的,步进频率信号就是一种宽带信号。设有 N 个脉冲,每个脉冲的脉宽为 T1 ,脉冲重复周期为 Tr ,每个脉冲的载频是均匀步进的,步进量为
) 是发射信号带宽,c 是电磁波传输的速度),提高雷达距离分辨力是以增大信号带宽为代价的,步进频率信号就是一种宽带信号。设有 N 个脉冲,每个脉冲的脉宽为 T1 ,脉冲重复周期为 Tr ,每个脉冲的载频是均匀步进的,步进量为  (一般取 = 1/T1 ),则其步进频率雷达的发射信号为
(一般取 = 1/T1 ),则其步进频率雷达的发射信号为


其中,i = 0, 1, 2, …, N - 1,θi 为相对相位,Bi 为在第 i 个发射频率  上的脉冲幅度。则接收到的目标回波信号为
上的脉冲幅度。则接收到的目标回波信号为

其中, 是第 i 个发射频率
是第 i 个发射频率  上接收到的回波脉冲幅度。
上接收到的回波脉冲幅度。
目标的距离时延为 ,R 是目标的距离,Vt 是目标的速度。为方便分析,假设Vt = 0(对于运动的目标需要进行运动补偿,关于运动补偿的方法可参考文献 [7]),于是
,R 是目标的距离,Vt 是目标的速度。为方便分析,假设Vt = 0(对于运动的目标需要进行运动补偿,关于运动补偿的方法可参考文献 [7]),于是 
 。
。
相参检测用的参考信号为


这里将 B 假定为常数。则回波信号与相参信号混频后输出的基带分量为

式中 Ai 为第 i 个频率阶跃上混频器输出的幅度,混频器输出的相位是

由式(5)可见,目标的激励信息包含在混频器输出基带分量的相位中。脉间频率步进雷达的信号处理是要从这些相位信息中提取目标的散射中心信息。
如果接收的目标信号有 K 个散射中心(也可以认为接收的目标信号由 K 个点目标构成),并且 K 个散射中心都在天线主瓣内,则对于发射上述的步进频率信号而言,雷达系统接收的基带信号可写为

ρn 与目标的雷达截面积有关,Rn 为目标第 n 个散射中心的距离,n(i)为高斯白噪声。
《3 Prony 算法》
3 Prony 算法
Prony 算法是用指数函数的一组线性组合来描述等间距采样数据的数学模型[8]。该方法并不是一种通常意义下的谱估计技术,经适当扩展后,Prony 方法可用来估计非有理式的谱密度。扩展的 Prony 方法假定的模型是一组 p 个具有任意振幅、相位和频率的指数函数,其离散时间的函数形式

 作为 x(n)的近似,用作样本数据 x(0), x(1),…, x(M - 1)的模型。bm 和 zm 分别为复数,也是待估计的参数,p 为模型的阶数,需要根据实际应用而设定,p 的具体选取方法可参阅文献 [9]。
作为 x(n)的近似,用作样本数据 x(0), x(1),…, x(M - 1)的模型。bm 和 zm 分别为复数,也是待估计的参数,p 为模型的阶数,需要根据实际应用而设定,p 的具体选取方法可参阅文献 [9]。
Prony 算法的关键是估计 bm 和 zm 值,具体基本步骤可以归纳如下:
1)使用样本数据 x(0), x(1),…, x(M - 1)构造矩阵 R1

式中, 。
。
2)用奇异值分解总体最小二乘的方法确定 R1 的有效值 pe 及 多项 式 
 的系数
的系数  。
。
3)求多项式  = 0 的根
= 0 的根 ,并用式(10)递推计算出
,并用式(10)递推计算出  ( n = p ,p + 1 ,…,M - 1, 其中
( n = p ,p + 1 ,…,M - 1, 其中  ,即
,即

4)将式(8)写成矩阵形式  其中
其中
因此,可以求得 b = 。
。
5)利用步骤 3 与步骤 4 中求取的 b1 , b2 , …,bp 和  ,可以进一步估计出 b1 , b2 , …,bp 和 z1 , z2 , …, zp 中所包含的参数。
,可以进一步估计出 b1 , b2 , …,bp 和 z1 , z2 , …, zp 中所包含的参数。
综上所述,扩展的 Prony 方法有以下优点:不需要计算序列的自相关矩阵;可同时估计出多个参数。但是 Prony 方法在信噪比较小时,估计性能会有所降低[10],具体见仿真结果分析。
《4 多散射中心目标的 Prony 方法建模》
4 多散射中心目标的 Prony 方法建模
比较式(6)与式(8),可令

故多散射中心的步进频率雷达回波信号可用扩展的 Prony 方法进行建模,其算法流程如图 1 所示。
《图1》
图1 扩展的 Prony 算法建模流程图
Fig.1 The block flow diagram of extended Prony’s method modeling
为了方便比较,将式(12)代入式(8),并作 IDFT 变换[10] 得

式中,r =ct 。因为距离与目标之间的关系更为直接,故这里用雷达与目标间的相对距离 r 代替 t 。Ru =  是雷达作用的最大不模糊距离。
是雷达作用的最大不模糊距离。
从式(13)中可以看出,Prony 算法在第 m 模型阶数时将产生一个距离峰值,也就是说,第 m 模型阶数在相对距离 rm 处描绘了目标的散射中心。这样,Prony 算法就可以给出在距离 rm 处 p 个散射中心的距离响应像:

由以上分析可知,Prony 算法一旦模型的选择过程完成,目标的散射中心就可以用 p 对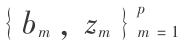 来描述。再将 p 对
来描述。再将 p 对  代入式(14),可得到每个散射中心的距离响应像。此外,根据式(12)Prony 算法还可以用来估计目标的雷达截面积。
代入式(14),可得到每个散射中心的距离响应像。此外,根据式(12)Prony 算法还可以用来估计目标的雷达截面积。
《5 实验仿真分析》
5 实验仿真分析
根据上述多散射中心的毫米波步进频率雷达信号以及扩充的 Prony 算法特点,选择仿真参数如下:雷达工作频率  = 94 GHz,
= 94 GHz, = 1/Tr = 50 kHz, T1 = 10 μs,
= 1/Tr = 50 kHz, T1 = 10 μs,  = 10 MHz, N = 64。对于距离 903 m,905 m,907 m,910 m 和 912 m 处的 5 个散射点,对应的 RCS 分别为 10 m2,20 m2,16 m2,4 m2 和 2 m2,信噪比分别为 10 dB 和 3 dB 的仿真波形如图2 至图 5 所示,各图中 IDFT 处理均采用 hamming 加窗处理。
= 10 MHz, N = 64。对于距离 903 m,905 m,907 m,910 m 和 912 m 处的 5 个散射点,对应的 RCS 分别为 10 m2,20 m2,16 m2,4 m2 和 2 m2,信噪比分别为 10 dB 和 3 dB 的仿真波形如图2 至图 5 所示,各图中 IDFT 处理均采用 hamming 加窗处理。
《图2》
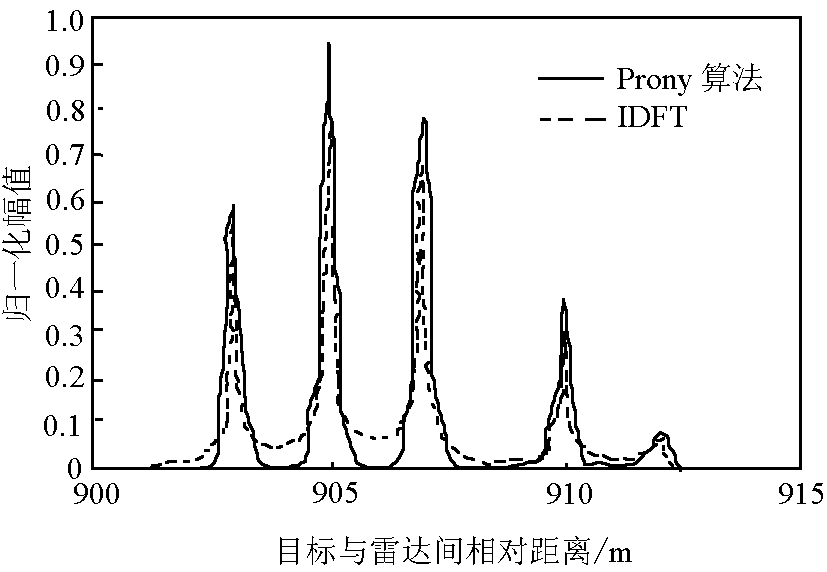
图2 SRN =10 dB 时,加汉明窗的 IDFT 与 pe =15,p =5 扩展 Prony 算法的多目标距离像
Fig.2 As SRN =10 dB, multi -target range profiles of an IDFT with a Hamming window and Prony algorithm with pe =15, p =5
《图3》
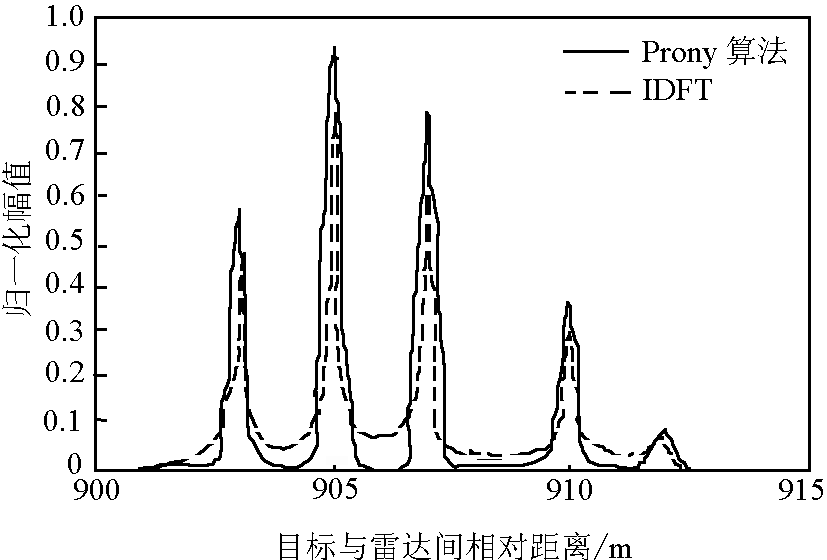
图3 SRN =10 dB 时,加汉明窗的 IDFT 与 pe =8,p =5 扩展 Prony 算法的多目标距离像
Fig.3 As SRN =10 dB, multi -target range profiles of an IDFT with a Hamming window and Prony algorithm with pe =8,p =5
《图4》
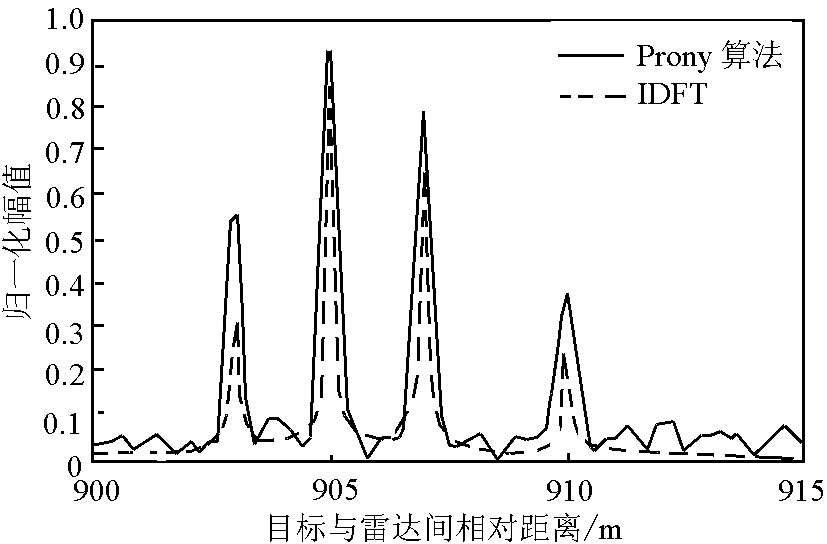
图4 SRN =3 dB 时加汉明窗的 IDFT 与 pe =10,p =5 扩展 Prony 算法的多目标距离像
Fig.4 As SRN =3 dB, multi -target range profiles of an IDFT with a Hamming window and Prony algorithm with pe =10, p =5
《图5》
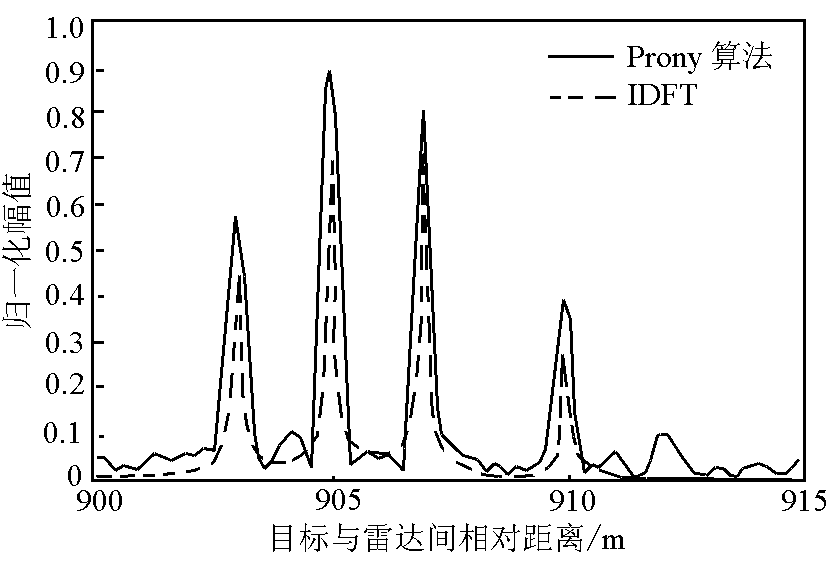
图5 SRN =3 dB 时,加汉明窗的 IDFT 与 pe =7,p =5 扩展 Prony 算法的多目标距离像
Fig.5 As SRN =3 dB, multi -target range profiles of an IDFT with a Hamming window and Prony algorithm with pe =7, p =5
在采用 IDFT 处理获得高距离分辨力的算法中,根据 Ru =  ,最大不模糊距离为 15 m;根据 ΔR =
,最大不模糊距离为 15 m;根据 ΔR =  ,距离分辨力为 0.234 m。图 2 中扩展的 Prony 算法选择 pe =15, p =5,可见,用 Prony 算法测量目标信息的精度明显优于直接用 IDFT 合成高分辨距离像。同理,图 3 中选择 pe =8, p =5 的扩展 Prony 算法亦如此。比较图 2 与图 3,当参数 pe 的值越接近模型的阶数 p,其估计的精度越高;而 IDFT 处理中其距离分辨力始终为 0.234 m,故散射中心的测量精度受固定距离分辨力的限制。图 4、图 5 亦如此。
,距离分辨力为 0.234 m。图 2 中扩展的 Prony 算法选择 pe =15, p =5,可见,用 Prony 算法测量目标信息的精度明显优于直接用 IDFT 合成高分辨距离像。同理,图 3 中选择 pe =8, p =5 的扩展 Prony 算法亦如此。比较图 2 与图 3,当参数 pe 的值越接近模型的阶数 p,其估计的精度越高;而 IDFT 处理中其距离分辨力始终为 0.234 m,故散射中心的测量精度受固定距离分辨力的限制。图 4、图 5 亦如此。
从图 4 和图 5 中可以看出,由于噪声的影响,使得 IDFT 处理中强散射目标的副瓣加大,位于 912 m 处的目标幅值与目标 903 m 与 905 m 之间的副瓣幅值相当,难以区分真假目标,此时若采用门限判决可能会出现虚假的散射中心。图 4 和图 5 中的 Prony 算法参数分别选择为 pe =10, p =5 和 pe =7,p =5,Prony 算法仍有较高的距离分辨力,并且无虚假目标出现,但是由于噪声影响的加强使得目标比较弱的散射中心难以检测。因此,在应用 Prony 算法时,对雷达系统的灵敏度要求较高。
《6 结语》
6 结语
步进频率体制雷达中,其接收的基带信号可看作包含目标信息的指数函数的线性组合,因此可以用扩展的 Prony 算法给予估计,从而计算出目标的距离响应像。通过理论分析和实验仿真表明,Prony 算法在步进频率雷达多目标检测中,可以获得比较精确的目标信息,并且可以克服直接采用 IDFT 处理中的一些缺点。但 Prony 算法对雷达系统的灵敏度要求较高,实际应用中还需考虑模型阶数的选择。











 京公网安备 11010502051620号
京公网安备 11010502051620号




