
并联构型装备已成为制造业目前的研究热点之一。与串联构型相比, 并联构型具有刚度好、精度高、高速和高加速度等特点, 众多研究机构和制造企业都看好其在制造领域的应用前景。目前多种并联构型装备已经被设计和开发出来, 应用的领域涉及机床、机器人、定位装置、娱乐、医疗卫生等。研究人员正试图开发出在速度、刚度、精度和费用等方面更优的并联构型装备, 以便在与传统制造装备的竞争中占据更有利的地位。
《1 并联构型装备的发展及特点》
1 并联构型装备的发展及特点
结构中包含一个或多个并联机构的机器称为并联构型装备。只要是多自由度, 驱动器分配在不同环路上的闭式多环机构均可称为并联机构
关于并联机构最早的文献出现在19世纪末
1) 杆件只受拉压, 不受弯曲应力;
2) 刚度高, 承载能力与整机质量比大;
3) 移动部件质量小, 可获得很高的动态特性;
4) 零件标准化程度高, 易于实现模块化设计;
5) 作业空间与机器尺寸比小;
6) 灵活性较差, 运动平台倾斜角度较小;
7) 作业空间存在杆件干涉和奇异位变形危险。
《图1》

图1 Gough的轮胎测试机
Fig.1 Type testing platform designed by Gough
《图2》

图2 Stewart平台
Fig.2 Stewart platform
《2 并联构型装备的研究进展》
2 并联构型装备的研究进展
《2.1 应用领域》
2.1 应用领域
根据德国机床研究所提供的数据, 目前大多数并联装备应用于机床、定位装置和机器人领域, 其中机床所占比例最高 (见图3) 。但在该领域, 样机数量远远超过商业用机, 比例是 7∶3。机器人领域的情况则相反, 60%已投入实际工业应用, 40%是样机。定位装置领域的情况与机床领域类似。
《图3》
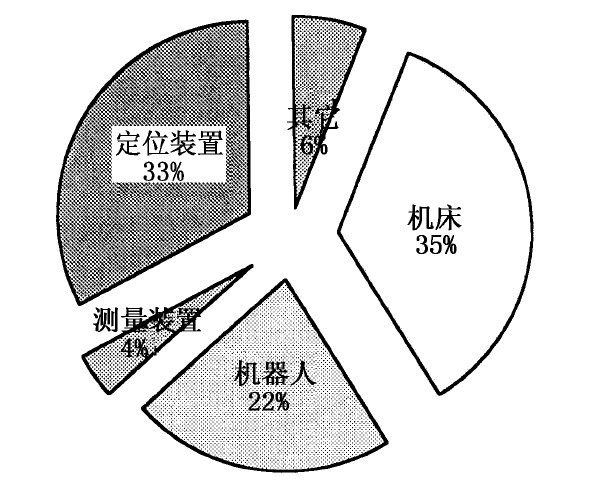
图3并联构型装备的应用
Fig.3 Application of parallel kinematics machines
不久前出现了混联结构, 也就是机构中至少包含一个串联和一个并联运动机构。这种结构在机器人领域得到广泛应用, 约占该领域整个并联装备的 40%。从总体上看, 混联结构的装备只占整个并联装备的 20% 左右。同纯并联机构相比, 由于末端执行器具有更大的倾斜角度, 混联机构的作业空间与机器尺寸比较大, 适合需要灵活性较高的环境, 但其刚度稍差, 所以在对刚度要求很高的机床或定位装置中, 纯并联结构的机器占 90% 以上。
《2.1.1 定位装置》
2.1.1 定位装置
并联机构在光学和微定位领域有很好的应用, 主要是发挥其刚度高、 运动误差无累积的特点。 定位装置一般采用纯并联结构 (大多数是基于六足结构的六自由度系统) , 个别采用平面或混联结构。驱动装置一般采用滚珠丝杠, 个别需要较小行程的设备采用压电驱动
《图4》

图4 PI公司的F-206精确定位系统
Fig.4 F-206 for accurately positioning tasks developed by PI Company
《2.1.2 机器人》
2.1.2 机器人
并联构型装备在机器人领域的应用主要集中在两个方面, 一是提供高加速度和高速度, 二是提供高于串联机器人的承载能力和刚度。
在需要快速移动能力的包装行业, 并联机器人得到广泛应用。比较成功的例子有三轴搬运系统 Delta 和六轴搬运系统 Hexa (见图5和图6) , 均使用肘关节驱动, 质量轻, 作业空间大。由于运动部件质量小, 最大加速度可达 20个g (Hexa) , 重复定位精度 0.01 mm。截至1998年底, 已经有 250 台Delta机器人投入实际生产环境。在制造领域, 使用并联机器人往往可以获得较好的刚度和精度。挪威MultiCraft公司的并联机器人就是一个成功的实例, 它主要应用于螺旋桨的磨削、门把手的磨削和抛光等 (见图7) 。
《图5》

图5 Demaurex公司的高速机器人Delta
Fig.5 High speed parallel manipulator—Delta, developed by Demaurex
《图6》
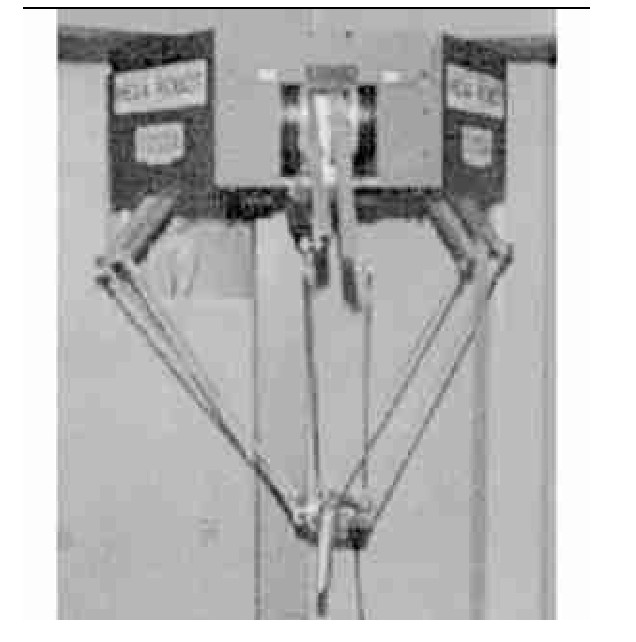
图6六自由度并联机器人HEXA
Fig.6 Six degree freedom parallel manipulator—HEXA
《图7》

图7挪威MultiCraft公司的MultiCraft 560
Fig.7 MultiCraft 560 developed by MultiCraft Company in Norway
《2.1.3 机床》
2.1.3 机床
目前大多数并联结构机床还处于样机阶段, 大约有30台, 其中80% 是铣床。表1列出了一些并联机床的主要性能指标。
表1前五种机床是连杆伸缩结构, 后两种采用铰链点移动结构, 均使用滚珠丝杠驱动, 大部分是纯六足结构, 主要面向五轴铣削加工。并联构型机床尚有许多需要完善的地方, 例如能够提供给系统设计者更多的标准化零部件, 提供给终端用户更加简单的避免干涉和处理奇异点的控制方式等。
目前许多公司正努力研制功能更加完备的并联装备, 以实现介于机床和机器人之间的应用, 即那些串联机器人无法满足要求 (可能由于刚度或精度等方面的原因) , 以及机床也不适合 (可能由于作业空间不够大, 或机床造价太高) 的操作任务。在该领域, 混联结构机器占有很大市场。比较成功的有Neos Robotics 公司的 Tricept (见图8) 、MultiCraft 560和应用于汽车薄板激光加工的 Georg V (见图9) 。这类机器的末端装有运动手腕, 其灵活性高, 作业空间与机器尺寸比可达 1∶3, 而普通纯并联机器只有 1∶6~1∶10, 传统机床也只是 1∶3~1∶4。在主受力方向的刚度一般为6~30 N/μm, 运动精度也高于传统串联机器人。以Neos Robotics 公司的TR805为例, 其最大速度可达100 m/min, 加速度2个g, 主轴功率45 kW, 最高转速24 000 r/min, 工作空间可达2 000 mm×1 800 mm×800 mm。由于末端装有串联式手腕, 刀具倾斜角度可达90°
《表1》
表1 并联机床的性能比较
Table 1 Survey of parallel kinematic machines

《图8》
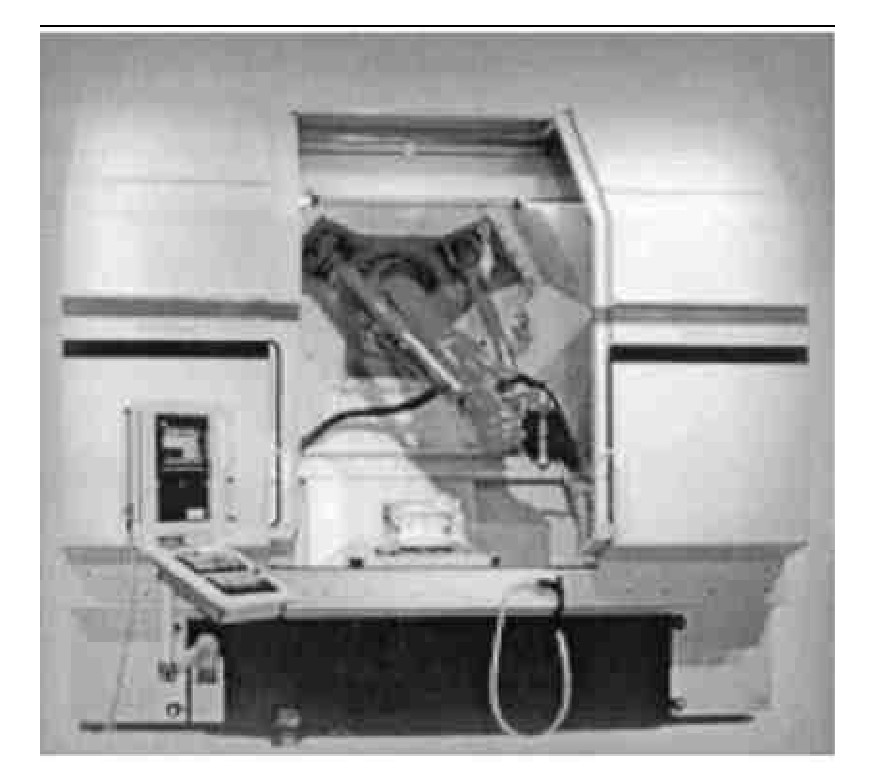
图8 Neos Robotics公司的TR805
Fig.8 TR805 developed by Neos Robotics
《2.2 驱动方式》
2.2 驱动方式
机器驱动方式主要由工作行程、加速度、速度、承载能力和精度等设计参数决定。在不同应用领域, 并联装备的尺寸相差很大。在一些微光学应用中, 整机尺寸只有几厘米;而在一些五轴机床的应用中, 整机尺寸可达几米 (例如 Ingersoll 的 HOH600 占地面积为 6 700 mm×5 600 mm) 。因此驱动方式也随着应用的不同而不同。对于小型装备, 使用压电驱动的例子越来越多。对于面向制造的铣削和激光加工, 尽管机器构型千差万别, 大多仍采用传统驱动方式——滚珠丝杠。只有个别装备采用直线电机驱动。一部分带肘部连杆的机器直接利用电机驱动。一般来讲, 采用直线驱动的机器可以获得更高的刚度, 而采用旋转驱动的机器能实现更高的速度和加速度。
《图9》

图9 Hannover大学的五轴混联机床GeorgⅤ
Fig.9 Five axis hybrid machine—GeorgⅤdeveloped by Hannover University
在支链伸缩的结构中, 为获得更好的运动精度, 滚珠丝杠普遍取代了液压驱动。这种结构的优点是不必在机架上安装直线轨道。由于驱动器要跟连杆一起运动, 增加了制造的难度, 尤其是增加了驱动杆的质量。在一些机器中, 将驱动器安装在铰链内部 (例如 Geodetic 和 Hexel) , 提高了制造精度, 降低了由于安装误差带来的运动偏差。图10为Geodetic开发的球形驱动器。
《图10》

图10球形驱动器
Fig.10 Spherical driver
苏黎世 ETH 的 Hexaglide采用直线电机驱动, 减少了传动过程中的机械环节, 可获得更大的速度和加速度以及更高的动态特性。因为机械传输不仅大幅度降低了直线运动和动态响应速度, 而且存在着反向间隙、摩擦、惯性负载以及结构刚度下降等问题。但直线驱动器受外力 (例如切削力、惯性力和摩擦力等) 的影响较大。由于各种扰动直接作用在驱动器上, 为了保证较高的位姿运动精度, 必须具有高质量的运动控制策略和更加精确的力控制方法
《2.3 控制技术》
2.3 控制技术
目前已有多家专业公司投身于并联构型装备的控制系统开发。开发出交互式NC后置处理器产生器CAM-POST的ICAM技术公司正在开发并联机床的NC后置处理器, 图11是其为Tricept 805开发的专用的并联机床后置处理器
TSOR技术公司为Tricept机器人的Siemens 840D 控制器开发了CNC程序的预览器, 名为TRE。操作者可以利用TRE运行实际的CNC代码, 得到三维动画演示, 可以在实际加工前检验控制代码是否正确。
《图11》

图11 ICAM针对并联机床开发的后置处理器
Fig.11 Postprocessor for parallel kinematics machine developed by ICAM
Siemens公司也开发了专门应用于并联机床的数控系统, 技术上的主要特点是:
1) 高速加工算法。包括预测算法、进给/加速的前向控制、振动限制等。
2) 误差补偿。支链的温度补偿、丝杠的误差补偿、铰链间隙补偿、基于冗余测量的整个系统补偿、自标定。
3) 3D可视化。加工仿真、NC检验、NC编程。
4) 开放式的CNC结构。实时的操作系统、友好的人机交互接口。
《2.4 几项重要研究计划》
2.4 几项重要研究计划
《2.4.1 NAMT计划》
2.4.1 NAMT计划
由美国NIST支持的NAMT并联机构研究小组主要进行三方面研究:并联机床性能研究和评价、远程控制技术和满足各种需求的仿真研究。利用Ingersoll开发的Octahedral Hexapod开展试验, 具体研究工作包括:
1) 评价、描述和比较这类新型机床的测试过程和标准;
2) 为机床使用者提供关于并联机床性能的第一手资料;
3) 面向远程试验、信息交互和集成的网络传感器和控制信息;
4) 面向机器快速开发的一些仿真工具, 例如程序验证、工作空间分析和工件定位等;
5) 提高精度的实用技术, 例如标定技术、反馈度量系统。
《2.4.2 ACROBAT计划》
2.4.2 ACROBAT计划
德国的ACROBAT计划的目标是基于SSM结构开发一台名为ACROBAT的样机 (见图12) , 从机床 (例如高速铣床) 和精密零件装配两个方面, 进行机器应用的各种评价试验, 首先进行刚度、惯性、灵活性和精度的评价。
《图12》

图12 ACROBAT的样机
Fig.12 The prototype for ACROBAT
《2.4.3 PAR.THE.NET》
2.4.3 PAR.THE.NET
PAR.THE.NET (Parallel machines thematic network, 并联机器主题网络) 由欧洲发起, 目标是在工业界和科研单位之间建立合作关系, 在机床和机器人领域共同致力于并联构型装备的研究和开发。以前, 欧洲主要致力于并联机构的基础研究, 发表了大量文章, 开发了许多试验样机。这种方法存在一定的不足, 因为将产品推向市场的实用化技术是经济发展最具推动力的因素。日本和美国已经率先将该技术应用于实际生产。因此, 在未来几年, 当基于并联机构的机床和机器人广泛应用于机械或相关领域时, 欧洲将落在后面。因此, PAR.THE.NET应运而生, 它反映了工业界的需求, 也为学术界指明了方向。
《2.4.4 ROBOTOOL计划》
2.4.4 ROBOTOOL计划
ROBOTOOL计划由欧盟委员会投资, 1998年启动, 研究期限为24个月, 总投资177万美元, 目标是针对整个欧洲进行并联构型装备的基础研究, 重点是针对机器构型和特殊铰链设计的软件工具开发、测量标定技术、专用CAM软件包、控制系统、伺服驱动技术和机电系统等。参加该项目的研究机构有:意大利的CNR-ITIA和技术转让部门、德国的IFW-Hannover和WZL/RWTH Aachen、瑞典的IVF、比利时的PMA/KU-Leuven、西班牙的Ikerlan、法国的LIRMM、英国的Delcam plc、瑞士的Sulzer NTI。
《2.4.5 KTI项目》
2.4.5 KTI项目
KTI项目始于1996年4月, 目标是研究并联机构在铣床工业中的应用, Hexaglide就是在该项目支持下开发的。基于Hexaglide原型样机的开发, 该项目进行运动学、标定技术、设计准则、动力学、控制策略和与传统机床的比较分析等方面的研究。此外, 该项目还开发了一台名为Triaglide 的三自由度并联机床样机 (见图13) 。参加的研究机构有瑞士的WZMO/KTI、Heidenhain (Schweiz) AG、Mikron SA Agno、W. Schneeberger AG和VSM。
《图13》
图13 Triaglide模型
Fig.13 The model of Triaglide
《3 亟待解决的关键技术》
3 亟待解决的关键技术
《3.1 设计》
3.1 设计
目前的研究主要集中在设计理论、设计方法等方面, 而要实现并联构型的产业化, 必须具备完善的设计手段和设计环境。
由于并联构型的输入和输出运动存在很强的非线性关系, 这给设计带来很大困难, 难以直观地判断和评价一个构型的运动是否可行, 性能是否满足要求。这就要求设计者不仅应具备精深的机构学知识, 还要熟悉机器人和机床的控制。即使这样, 设计中仍然不可避免地会出现构想与实际不相符, 导致设计周期长、工作量大、风险大, 很难适应商品化的要求。因此, 一个能支持并联机床所有设计活动的一体化软件集成环境很有必要
清华大学制造工程研究所基于虚拟制造的思想, 开发了并联构型装备虚拟产品设计系统。该系统为设计者提供数字化的设计开发环境, 提供包括并联机构概念设计、运动学设计、整机设计、动力学分析、精度设计、可制造性分析、作业过程仿真与性能分析等方面的分析和设计平台;为研究者提供并联装备设计方法研究、工作性能分析和作业工艺优化研究平台;为用户提供各种并联类装备的作业过程、作业效果、作业能力演示平台。该系统融合最新设计理论成果, 提供集成设计和仿真分析环境, 改善了研究手段, 提高了设计质量和效率, 促进了新型并联装备的开发
《3.2 精度保证策略》
3.2 精度保证策略
精度问题是并联构型装备能否投入工业运行的一个关键因素。从一般的机床研究观点来看, 提高精度的主要策略是精度分析、综合及补偿。目前提高并联装备精度的主要方法是通过精度设计和运动学标定, 在这方面有相当多的理论研究成果
并联构型与传统串联构型在运动原理上存在巨大差异, 仅仅依靠上述研究无法克服其全部误差。首先, 并联机构在作业空间中刚度变化很大
《3.3 控制》
3.3 控制
从伺服控制的角度来看, 开发并联装备需要的控制知识与开发传统三坐标、五坐标加工中心或多自由度机器人所需要的没什么不同
并联构型装备的驱动坐标系统与工件坐标系统完全不同, 对于普通用户, 如果没有任何帮助工具, 很难正确操作, 同时也给安装和维护带来困难。因此, 一个完备的控制系统除了能够提供必要的控制功能 (用户能按照工件坐标系进行控制) , 还应该提供一个三维的可视化系统或CAD/CAM工具。该系统能够让用户在机器工作之前检查实际运行情况。系统还应该能够标识临界位形, 例如可能的碰撞或支链的过载等, 应该能够避免机械奇异位形的发生。只有这样, 这种新型装备才可能被更多潜在用户所接受。
《4 结论》
4 结论
由于许多关键技术尚未完全解决, 并联构型装备的实用化进程并没有大多数人想象的那样顺利。对待这样一个新生事物, 既要看到它巨大的发展潜能, 又要保持清醒的头脑。可以肯定的是, 发展只有十余年的并联构型装备现在还无法在广阔的市场上同已有几百年历史的串联构型竞争。但它的出现为工业界提供了更多的选择。随着各种关键技术的解决, 并联构型装备肯定会在某些应用领域发挥巨大的作用, 成为串联构型装备的一个有益的补充和有力的竞争对手。











 京公网安备 11010502051620号
京公网安备 11010502051620号




