
《1 Introduction 》
1 Introduction
Owing to the rapid advancement of automobile intelligence and electronics, self-driving vehicles have become vital to the future development of automobiles. In response to the intelligent transformation of the automotive industry, developed countries are actively implementing guidance and regulations for the application of self-driving vehicle technology by relying on their profound automotive industry foundation. U.S. companies have maintained their leading position in the research of self-driving technology, whereas management and legislative bodies have introduced relevant policies and regulations accordingly, such as the Federal Automated Vehicles Policy (2016) and the Self-Drive Act (2017). Germany focuses on establishing and improving methods and systems for the attribution of rights and responsibilities associated with intelligent vehicles and has introduced the Eighth Amendment (2017) to the Road Traffic Law on autonomous driving. In China, self-driving vehicles are transforming from the initial technology research and development (R&D) stage to the large-scale experiment and trial stages combined with specific application scenarios, whereas the associated supervision is still in the embryonic stage. The progress of industry management is being monitored actively. For example, through the Smart Cars Innovative Development Strategy (2018), a top-level plan for the intelligent vehicle industry is created. Meanwhile, the Internet of Vehicles (Intelligent Connected Cars) Industry Development Action Plan (2018) focuses on the construction of the intelligent vehicle industry system and proposes medium- and long-term planning.
It is noteworthy that the safety of self-driving vehicles, as a basic prerequisite for promoting large-scale applications and industrialization in specific scenarios, remains an issue to the industry, academia, and the society. In recent years, autonomous vehicles have collided with pedestrians during tests, causing injuries and deaths; meanwhile, electric vehicle brake failures have resulted in traffic accidents, which incited worry among the society and public regarding the safety of self-driving vehicles. Currently, China’s intelligent vehicle industry is developing rapidly. Enterprises, research institutes, and local governments have increased investments in key technology research areas to promote breakthroughs in industrial development. Safety is a prerequisite that must be considered when formulating regulations. Appropriate and long-term safety investigations must be conducted to ensure sustainable and high-quality development in the intelligent vehicle industry. Based on literature review, because driverless technology is yet to be industrialized, industry-specific statistics remain insufficient. Local and foreign researchers have performed qualitative investigations pertaining to the safety risks of self-driving vehicles [1]; in this regard, separate considerations exist for driverless technology risks and legal and moral hazards [2–13]. However, quantitative studies regarding security risks are yet to be reported.
Hence, in this study, we identify and define the key elements of self-driving vehicle safety risks and then quantitatively measure them. In addition to analyzing the data and summarizing the conclusions, we extend the countermeasures from the perspectives of enterprises, policies, and consumers to provide a basic reference for self-driving vehicle safety risk research and the development of the intelligent vehicle industry in China.
《2 Literature review: safety risks of self-driving vehicles》
2 Literature review: safety risks of self-driving vehicles
Self-driving vehicles rely on the collaboration of computer systems, artificial intelligence (AI) technology, sensing and image-based recognition, radar data-based detection, high-resolution maps, and high-accuracy positioning systems, as well as use electronic control units to function safely without human drivers [14]. In fact, self-driving vehicles do not adjust the structure of the car or change the original functions; instead, they integrate intelligent devices (including software and hardware) required for autonomous driving [3]. According to the standards established by the Society of Automotive Engineers International, autonomous driving can be classified into six levels from L0 to L5 [15]. For a more focused and precise research scope and concept definition, the term “self-driving vehicle” is used herein to refer to a car that is automatically and safely operated using an automatic driving system without a human driver (i.e., autonomous driving at the level of L5 and above).
《2.1 Engineering risks of self-driving vehicle》
2.1 Engineering risks of self-driving vehicle
A safe self-driving vehicle is inseparable from the “escort” of the following three systems: perception, decision making, and control. The perception system is used to capture real-time changes of the road surface, traffic signs, markings, and traffic lights. The decision-making system develops global and local path planning. The control system controls the throttle components, brake components, steering wheel, and speed change lever of the self-driving vehicle [2].
[10]
[6]
《2.2 Social risks of self-driving vehicle》
2.2 Social risks of self-driving vehicle
The social risks of self-driving vehicles include the following four aspects: law, ethics, psychology, and management. It is noteworthy that the psychology and management of self-driving vehicles have not been discussed, nor have comprehensive risk identifications and evaluations pertaining to self-driving vehicles been conducted. Hence, the safety risk identification and measurement of self-driving vehicles are first presented herein.
In terms of legal risks, researchers primarily focus on the identification of the subject of tort liability, the tracing of cause and effect, and the obligation of proof to provide a theoretical basis for perfecting legislation. (1) Self-driving vehicles are not “persons” at the legal level and cannot be the subject of tort liability [7]. Depending on the circumstances of an accident, the responsible parties may differ: for example, when a product is defective, the producer assumes responsibility and bears the tort liability [9]; the user assumes responsibility when an accident occurs in the manual driving mode or an accident is caused by improper maintenance by the user; the seller assumes responsibility when the product is improperly stored and the obligation of notification is not fulfilled truthfully, which results in an accident [5]. (2) Regarding the tracing of the cause and effect of an accident, a few researchers suggest that it should be recorded with reference to the “black box” technology of aircraft and high-speed railways such that it can be traced subsequently [4]. However, in the era of the Internet of Everything, relying only on the on-board “black box” may result in problems such as hacker attacks and information tampering. A cross-regional professional data analysis center can be established to focus on the preservation and analysis of self-driving vehicle information [16]. (3) Regarding the obligation of proof, current laws generally adhere to the principle of “who advocates, who produces proof.” However, in the field of autonomous driving, having consumers bear the burden of proof of rights protection after an accident is unfair. Therefore, the following has been proposed: consumers are required to only prove that the vehicle is in the automatic driving mode when an accident occurs [9].
In terms of ethical risks, researchers have analyzed ethical value trends in society and discussed machine-handling and coping strategies that involve ethics. The moral orientation of society has been investigated, where moral machine research was discovered to be the most influential. An online experimental website was designed to simulate the ethical and moral dilemmas encountered by self-driving vehicles. The focus of the plan was to count the choice tendency of subjects in various countries and the differences in choice tendencies resulting from differences in culture and country. Some studies show that users recognize self-driving vehicles that are designed in accordance with the principle of utilitarianism; however, they are more willing to ride in self-driving vehicles that can protect passengers [13]. Meanwhile, different conclusions were yielded from several experiments, i.e., participants exhibit higher moral inclinations and are more willing to “sacrifice themselves and protect others.” In particular, after considering the age factor, participants tend to implement measures to ensure the safety of people (e.g., by controlling the vehicle such that it turns to the side of a road) [12].
《3 Safety risk identification of self-driving vehicles》
3 Safety risk identification of self-driving vehicles
[17]
《3.1 Case acquisition and selection》
3.1 Case acquisition and selection
In this study, data were acquired via two methods: second-hand surveys and in-depth interviews. The former contain public information (e.g., company homepage information, business registration information, news reports, interviews with people, and annual reports of listed companies) and internal company data (e.g., internal publications, internal brochures, and presentation documents). The latter involve communications from residents of the Pearl River Delta and Yangtze River Delta regions, including senior corporate executives, project managers, technical personnel, and government managers, who possess extensive experience in the industry and a good understanding of the safety risks of self-driving vehicles. In this study, we selected 13 enterprise cases in the Pearl River Delta region and 9 government cases in the Pearl River Delta and Yangtze River Delta regions. A total of 22 relevant case documents with approximately 440 000 words were used.
The criteria for case selection are as follows: (1) The principle of differential replication of case studies: Companies can engage in different types of driverless businesses, government agencies are located in different regions, and management business attributes are different. (2) Data availability: Selected companies and government agencies can provide first- or second-hand information to the public, particularly if the enterprise is in a stable development state. (3) Convenience of research: The local government and alumni organizations can establish a good cooperative relationship with the surveyed company before visits are conducted, which facilitates research and return visits. (4) Quality of the content of case materials: The selected cases can fully reflect the risk factors of the self-driving vehicles.
《3.2 Data analysis and coding》
3.2 Data analysis and coding
[18]
3.2.1 Open coding
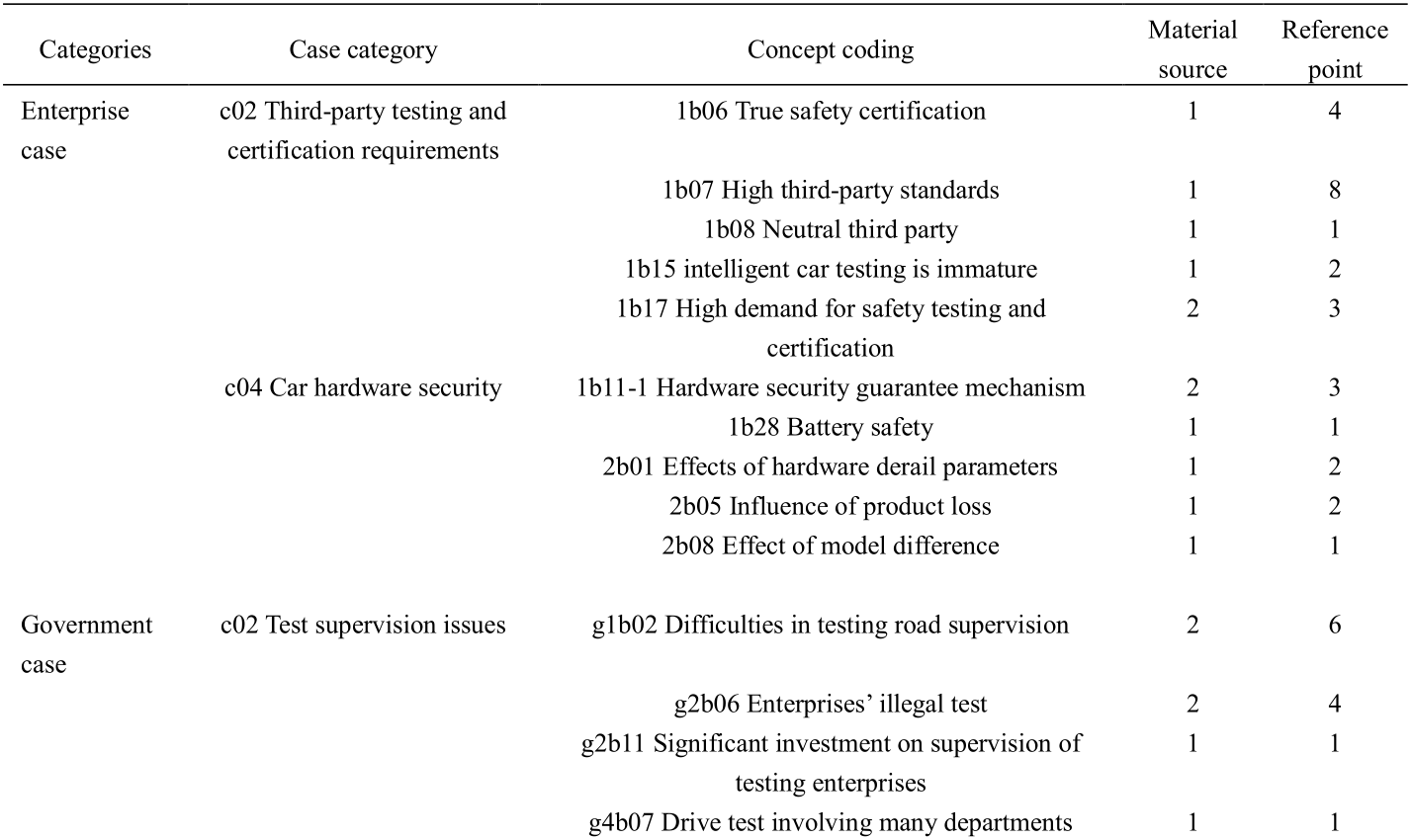
Focusing on the research theme, the extracted data were conceptualized and then categorized: conceptual coding includes labeling preprocessing and formal conceptualization, and categorical coding via a continuous comparison to modify the conceptual coding. Owing to the repetition and overlap of semantics, these concepts must be further summarized and integrated. To avoid premature information loss, the concepts of enterprise and government cases were separately integrated into the study. Therefore, based on 98 enterprise case concept codes and 71 government case concept codes obtained in the early stage, the coding was compared and revised. Finally, 25 enterprise and 13 government case categories were identified. Owing to space limitations, only the salient codes are listed in Table 1.
《Table 1》
Table 1. List of enterprise and government case categorization codes (partial).
3.2.2 Spindle coding
We analyzed the relationship among the categories obtained in the open-coding process and classified the interconnected components between the categories into higher-level main categories. After sorting, summarizing, and merging the categories in the previous steps, six main categories of enterprise cases and three main categories of government cases were obtained. At this point, the risk identification stage was completed.
《3.3 Element framework of safety risks》
3.3 Element framework of safety risks
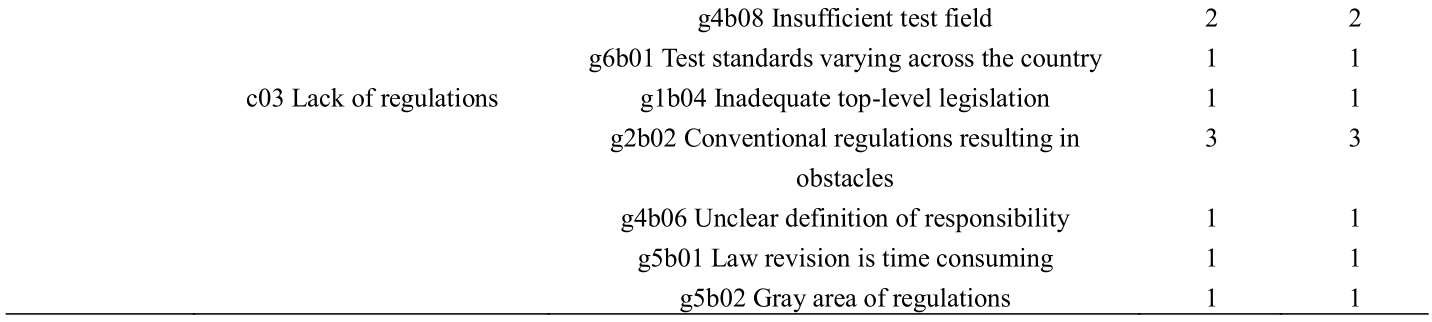
Because the connotations of the enterprise and government case frameworks overlap significantly, they are adjusted and merged into a single framework in this study (Table 2). The first level is the main category, which includes six types of safety risk elements. Among them, the first three categories are engineering risks, and the final three categories are humanities and social risks. The second layer is the measurement factor for the security risk elements. The third layer comprises items from the measurement questionnaires of the safety risk elements.
《Table 2》
Table 2. Element framework for safety risk of self-driving vehicle.

《4 Safety risk measurement of self-driving vehicles》
4 Safety risk measurement of self-driving vehicles
《4.1 Questionnaire design》
4.1 Questionnaire design
For each concept in the element framework, we referred to the text of its original source and compiled the corresponding and concisely summarized scale questions, e.g., “the difference between different models will impose an important and adverse effect on the safety of self-driving vehicles.” Finally, the corresponding questions of all concepts in the enterprise and government case frameworks were obtained, which were then used as the original question bank for the investigation. Subsequently, the members of the research team conducted two rounds of opinion discussion and revision, which resulted in the creation of an initial questionnaire comprising 142 questions. The first section of the questionnaire includes the basic personal information of the surveyed participants, including their gender, age, city, education, and employment status, as well as the industry in which they are engaged, whether they have worked with unmanned driving or related companies, and their employment length. The second section includes 28 scale questions pertaining to single-vehicle safety and networking safety. The third section includes 52 questions pertaining to laws, policies, and public opinions. The fourth section includes 54 scale questions pertaining to the technological level and industrial risk.
《4.2 Trial survey and questionnaire revision》
4.2 Trial survey and questionnaire revision
The survey was conducted in the form of self-filled questionnaires on the Internet and was distributed through the “Wenjuanxing” platform of Changsha Ranxing Information Technology Co., Ltd. The study duration was July 25–31, 2020. A total of 1310 questionnaires were administered. Among them, 1195 questionnaires were valid (effective rate: 91.22%).
Several deletions and corrections were performed to the items and latent variables in the confirmatory factor analysis model after the reliability, construct validity, discriminative validity, convergence validity, overall model fitness evaluation index, and correction index were considered comprehensively. For example, the measurement model of the single-vehicle safety component was adjusted (Fig. 1) to obtain a better fitting effect.
《Fig. 1》

Fig. 1. Measurement model of single-vehicle safety.
In terms of reliability, the Cronbach’s α coefficients of the three factors were 0.742, 0.782, and 0.822 (all exceeding 0.7), indicating the high reliability of the scale.
Meanwhile, exploratory factor analysis was performed to conduct a preliminary test on the construct validity. The Kaiser-Meyer-Olkin (KMO) value was 0.870, which is suitable for exploratory factor analysis as it passes Bartlett’s test and is a sufficiently high value. The explained total variance was 72.832%. Principal component analysis was performed to extract the fixed number factors, and the maximal rotation of variance method was used to analyze the measurement items. The results of the exploratory factor analysis show that the factor loading of the seven items investigated exceeded 0.7, although the loading of item Q209 was 0.616. The items were well distributed across the three factors.
In terms of convergent validity, the average variation extraction amount (AVE) of “multilayered safety assurance,” “road environment,” and “sensor safety” were 0.495, 0.592 and 0.698, respectively; as indicated, the AVE of “multilayered safety assurance” is approximately 0.5, whereas those of the other two are greater than 0.5. The corresponding combined reliabilities (CR) were 0.746, 0.813, and 0.822 (all exceeding 0.7), respectively, which indicates the good convergence validity of each factor.
In terms of discriminative validity, the square roots of the AVE of the abovementioned three factors were greater than the correlation coefficients of other factors, which indicates the good discriminative validity of the model.
《4.3 Formal investigation and risk measurement》
4.3 Formal investigation and risk measurement
Sample services for the duration of September 1–15, 2020 were obtained from the “Wenjuanxing” platform. A total of 3167 formal survey questionnaires were obtained, among which 3153 were valid questionnaires (effective rate: 99.56%). To verify each section of the model, the sample data were clean thoroughly in advance.
4.3.1 Measurement model of laws and policies
In this study, screening was performed primarily based on the intra-group variance of the item under each factor in each sample and the inter-group variance of the mean of each group. For the four groups of questions in the laws and policies sections, i.e., “standard gaps,” “law gaps,” “government promotion behaviors,” and “relevant regulatory field gaps,” the intra-group variance of each sample under each set of questions was calculated and summed. All samples were sorted based on the variance sum (the smaller the sum of variance within the group, the higher is the ranking of the sample). The variance among the four groups of questions was calculated. For the case involving the same variance within a group, the greater the variance among the groups, the higher was the ranking of the sample. Screening was performed based on the items in the single-vehicle safety section, and the top-1000 questionnaires were selected for model verification.
The statistics pertaining to the characteristics of the surveyed population show that the proportion of the population with each characteristic remained unchanged as compared with the trial survey sample. The proportions of men and women were 47.7% and 52.3%, respectively, which are relatively balanced. Those aged 20–30 years old and 30–40 years old constituted 28.6% and 35.1%, respectively. The education levels were primarily college and undergraduate; they constituted 29.1% and 36.3%, respectively, which are relatively balanced and reflect a certain degree of representativeness. Most of the participants were employed, which implies that they possess good social experience.
A total of 838 respondents from the three states of employed, unemployed, and freelance participated in the study, and they were not concentrated within a certain industry. The “manufacturing industry” and “information transmission, software and information technology service industries” constituted slightly higher proportions (22.91% and 15.04%, respectively) as compared with other industries. These industries are associated closely with self-driving vehicles. Therefore, the samples represent ordinary people who are associated with self-driving vehicles. A total of 166 respondents had worked for driverless-related companies, and their employment time was distributed relatively evenly, as follows: less than one year, 24.1%; one to three years, 45.78%; three to five years, 13.86%; five to ten years, 12.65%; more than ten years, 3.61%. The proportion of people who had worked in the industry for one to three years was relatively high. Because the number of people with extensive industry experience is relatively low, their effect on the overall results is ambiguous.
For the measurement model of the risk section of laws and policies, the formal samples obtained after detailed screening were used for verification. As shown in Fig. 2, the overall fitting effect of the model is favorable.
《Fig. 2》
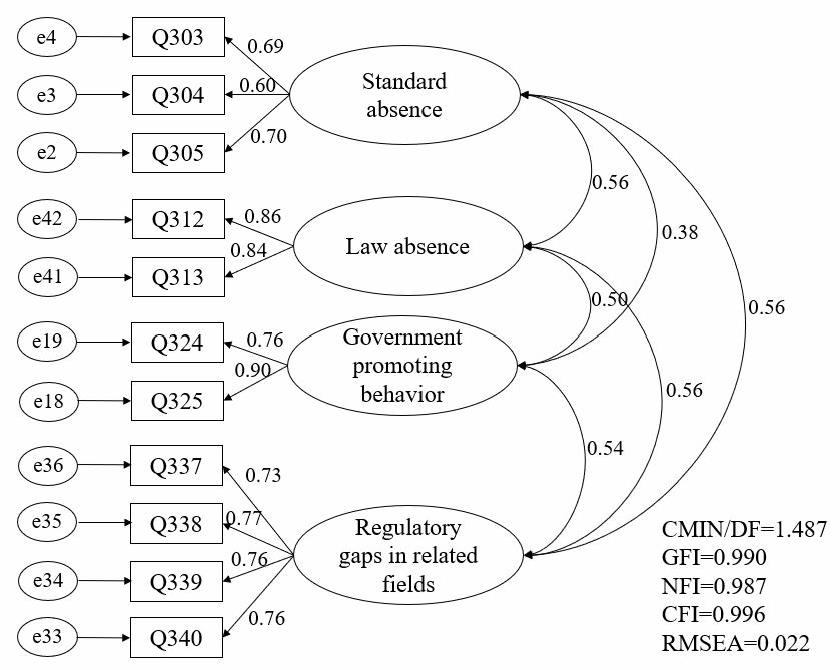
Fig. 2. Measurement model of laws and policies.
In terms of credibility, Cronbach’s α coefficients of factors “standard absence,” “law absence,” “government promoting behavior,” and “regulatory gaps in related fields” were 0.693, 0.837, 0.813, and 0.844, respectively. The “standard absence” factor was approximately 0.7, whereas that of the other three factors exceed 0.7, which indicates the high credibility of the scale in this verification.
In terms of construct validity, the KMO value of 0.850 is suitable for exploratory factor analysis as it passes Bartlett’s test and is a sufficiently high value. The explained total variance was 72.895%. Principal component analysis was performed to extract the fixed number factors, and the maximal rotation of variance method was used to analyze the measurement items. The result of the exploratory factor analysis shows that the factor loadings of the 11 items exceeded 0.7 (i.e., well distributed on the four factors).
In terms of convergence validity, the AVEs of factors “standard absence,” “law absence,” “"government promoting behavior,” and “regulatory gaps in related fields” were 0.437, 0.720, 0.695, and 0.577 respectively, among which three of the factors exhibited AVEs exceeding 0.5. The corresponding CRs were 0.698, 0.837, 0.819, and 0.845, respectively, among which three of them exceeded 0.7, indicating that the various factors in this verification exhibit good convergence validity.
In terms of discriminative validity, the square roots of the AVE of the four factors exceeded the correlation coefficients of other factors, which indicates the good discriminative validity of the model.
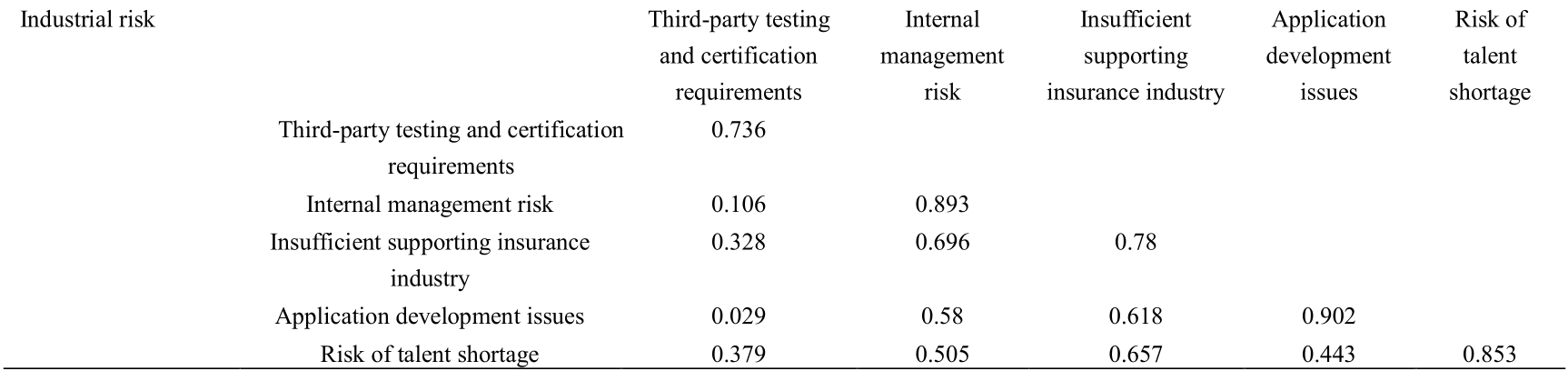
4.3.2 Model verification results of other risks
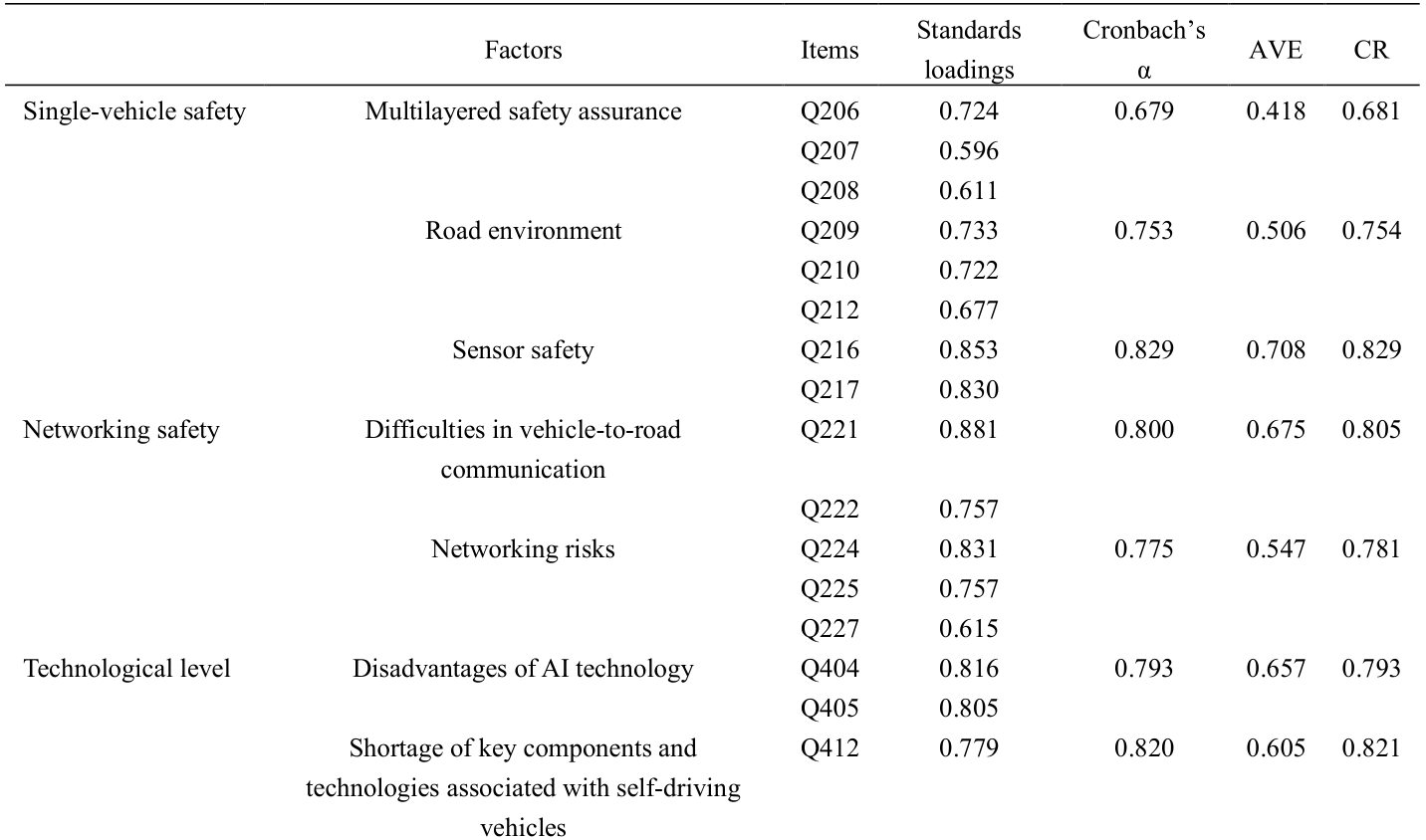
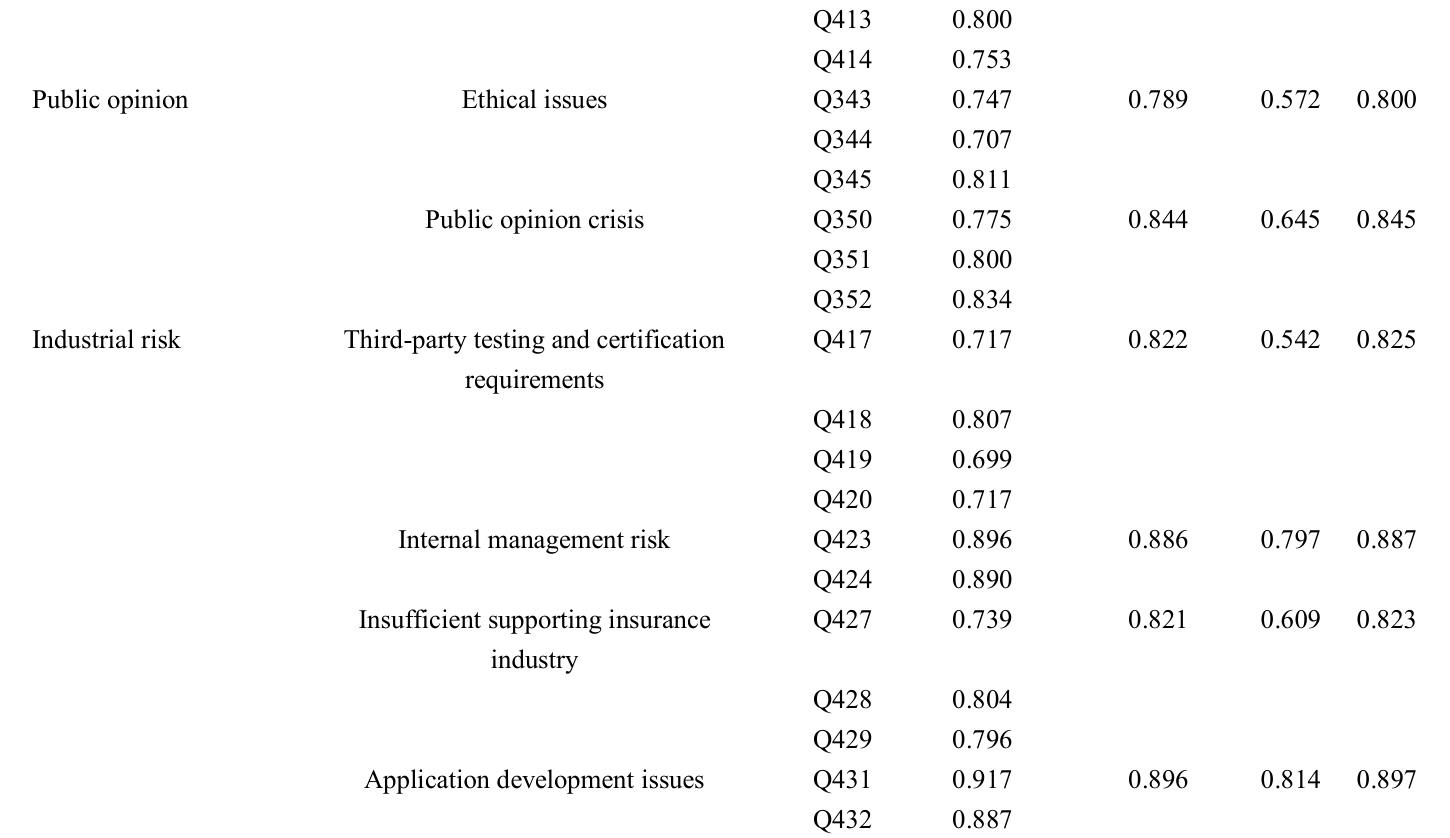
The model results for single-vehicle safety, networking safety, technological level, public opinion, and industrial risk are shown in Tables 3–5.
In terms of reliability, each factor of the five safety-risk models indicated good reliability. Except for the “multilayered safety assurance” factor under bicycle safety, the Cronbach’s α of the other factors exceeded 0.7.
Meanwhile, the construction validity of the five safety risk models was relatively good, and all models yielded good results in the exploratory factor analysis.
《Table 3》
Table 3. Credibility and convergent validity of model.

《Table 4》
Table 4. Construct validity and fitting index of model.


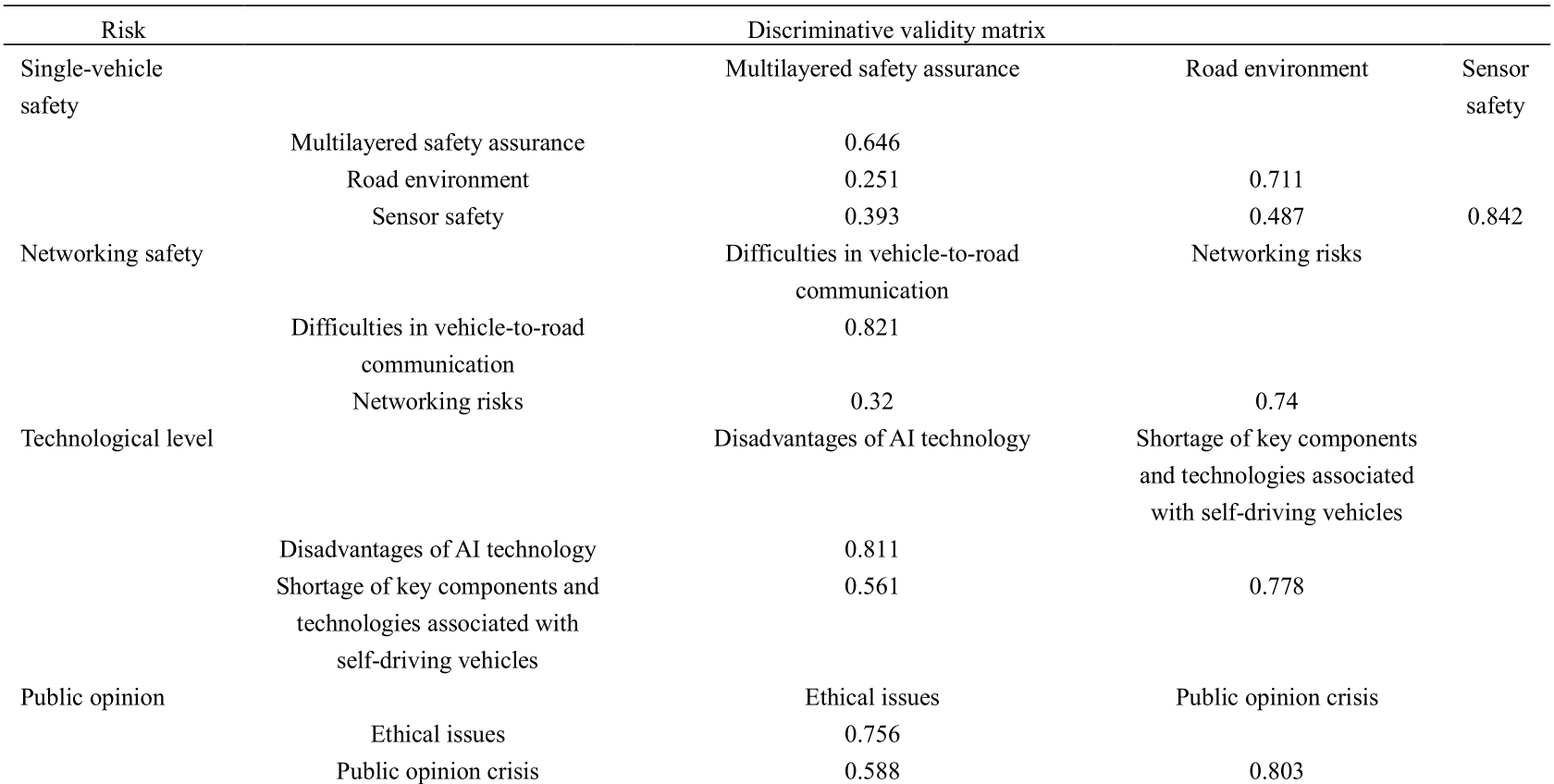
In the confirmatory factor analysis, the five models exhibited a good fit (except for the slightly unsatisfactory technology risk). Furthermore, the convergence validity of the five models was good. Except for the “multilayered safety guarantee” factor under bicycle safety, the AVE of every other factor exceeded 0.5, and the CR exceeded 0.7. The four models exhibited good discriminative validity, and all the square roots of the AVE of all factors exceeded the correlation coefficient of other factors for the same model.
In this study, the modeling process was verified (based on the scale data obtained from two rounds of questionnaire surveys), and a set of measurable and observable driverless safety risk element frameworks was formed (Table 3).
《5 Conclusion and countermeasures 》
5 Conclusion and countermeasures
《5.1 Conclusion》
5.1 Conclusion
In the risk identification stage, grounded theory was used to extract and identify the safety risks of self-driving vehicles from driverless company cases in the Pearl River Delta and government cases in the Pearl River Delta and Yangtze River Delta. The conceptualization–categorization–main axis coding method was used to organize the levels of risk elements; subsequently, a safety risk framework for the self-driving vehicle was formed. Six types of risks (main categories) were identified from the enterprise cases: single-vehicle safety, networking safety, technological level, laws and policies, public opinion, and industrial risks. The risks included 25 categories and 98 concepts that were important to the companies. The risks identified from the government cases included three main categories: official constraints, insufficient environmental protection, and the industry’s own problems. They included 13 categories and 71 concepts. The government was focused on management, such as the government’s methods and capabilities for promoting the industry, supervision of self-driving vehicles on road testing, and supervision of driverless related fields. A theoretical prototype of the safety risks of self-driving vehicles was established, which can provide theoretical support for subsequent analyses.
In the risk measurement stage, survey scales were compiled, questionnaires were designed based on the risk framework, and survey scale revisions were completed via the reliability and validity analysis of the trial survey. The risk measurement was verified via confirmatory factor analysis based on the formal questionnaire survey results. Regarding the safety risks of self-driving vehicles, the first level included six factors: single-vehicle safety, networking safety, technological level, laws and policies, public opinion, and industrial risks. Meanwhile, the second and third layers included 18 and 48 risk measurement items, respectively.
In this study, both theoretical and empirical aspects were considered to establish an applicable and measurable self-driving vehicle safety risk framework. The risk was formed into a theory, and the corresponding application scope can be further investigated and expanded (i.e., from small to large, and from typical people to ordinary people).
《Table 5》
Table 5. Discriminative validity of model.
《5.2 Countermeasures》
5.2 Countermeasures
5.2.1 Enterprises’ countermeasures
To ensure the safety of single vehicles, companies should improve the quality of key components and adopt driverless technology in the components of conventional cars. Self-driving vehicles will encounter complex or rare road conditions (e.g., unclear lane lines and extreme weather), and the range of training scenarios should be broadened to adapt to real driving scenarios.
To ensure networking safety in the development of vehicle intelligence, enterprises must strengthen information security construction, prevent hacker attacks to avoid the theft of important data, and maintain the safety and reliability of various types of information. The control and decision-making ability of self-driving vehicles should be decentralized, i.e., the car must retain sufficient control and decision-making authority to avoid being remotely controlled.
Regarding the risk of the technological level, AI technology exhibits uncertain, unexplainable, and data-dependent traits. Its ability to solve new and unexpected problems is not superior to that of humans in some scenarios. Therefore, driverless technology should not overly rely on Ai technology. Other technologies (e.g., the fifth-generation mobile communication technology, Internet of Vehicles, and blockchain) should be used in conjunction with AI technology. Additionally, technology R&D and performance upgrades of key driverless components (e.g., chassis, sensors, chips, and materials) should be prioritized.
To address the lag in promulgation of laws and policies, companies should actively focus on and participate in the research and formulation of laws and standards associated with driverless driving in a timely manner. Enterprises must comply strictly with laws and regulations when exploring driverless technology, and vehicle modification and testing should be performed to ensure adequate safety.
In response to public opinion, companies should perform sales activities while complying with regulations, refrain from false publicity to avoid misjudgment by consumers of autonomous driving technology capabilities, and promote business sustainability. In fact, they must advocate healthy competition in the driverless industry, eliminate malicious industry public opinion slander, avoid consumer doubts regarding the entire industry, and create a good atmosphere for the development of the industry.
In response to industrial risks, companies should be cognizant of their deficiencies, such as whether the management system is complete, the awareness of risk hazards is lacking, and emergency updates are timely and effective, such that the corresponding improvement measures can be implemented. Independent third-party institutions in the industry should be established to perform professional safety inspections and certifications. Investment activities should comprehensively consider the medium- and long-term development of the driverless industry, advocate value investment, and avoid the short-sightedness and disorder of industry development, which may be caused by excessive rapid commercialization.
5.2.2 Government’s countermeasures
Supervision of unmanned driving requires the cooperation of multiple departments. Relevant departments should strengthen communication to avoid work inefficiency caused by information asymmetry. The management agency should promptly perform the top-level design and comprehensive planning of the driverless industry, provide the society with clear industry layout guidance (e.g., promotion focus and promotion methods), and gradually eliminate conventional methods such as scattered subsidies to enterprises.
The supervision of testing and related fields should be strengthened appropriately. Some companies have privately modified or illegally tested vehicles without qualifications, which violates regulations. This matter should be addressed promptly, and modifications and tests that violate traffic safety laws and regulations should be eliminated the soonest possible.
Furthermore, the management department should conduct top-level investigations and layout designs of relevant regulations and standards the soonest, conduct social discussions regarding the regulations and standards of self-driving vehicles, and promulgate them appropriately to provide relatively clear guidelines and constraints for business investment and technology R&D activities of enterprises, which facilitates the rapid and orderly development of the driverless industry.
Additionally, legal issues, such as the delegation of responsibility toward self-driving vehicles after an accident occurs and the tracing of accident causes, should be considered the soonest possible. This is an important basis that enables enterprises to explore the market and develop new technologies. For example, current road traffic safety laws and regulations can be adjusted based on the progress of driverless technology to adapt to the times (such as not prohibiting drivers from having their hands off the steering wheel).
The construction of a driverless talent training system should be accelerated. In this regard, the local talent training model of universities and research institutes must be improved urgently for the driverless industry. Furthermore, active measures are to be implemented to attract and retain talent, such as by inviting excellent mature talent from abroad as well as cross-industry professionals. Management should gradually innovate the education and training model as well as support key technological breakthroughs and localized applications, such as chassis-by-wire, chips, and sensors.
5.2.3 Consumers’ countermeasures
At the psychological level, consumers tend to exhibit high trust in driverless technology when it is still in the development and progress stages; hence, they may be over-reliant on the system when driving. Consumers are advised to maintain the required qualities and vigilance of vehicle drivers, maintain good driving habits, and behave in a civil and courteous manner when driving. In particular, when encountering self-driving vehicle tests, they should not deliberately chase or whistle.
At the public opinion level, consumers should form opinions objectively instead of credulously believing exaggerated publicity. Even if smart vehicles are being exaggerated during the sales stage, consumers should maintain their typical expectations of the product and objectively evaluate the deficiencies of driverless products. Some media may improperly disseminate information to driverless companies because of peer competition. Consumers should remain rational and not indiscriminately believe the trend when a situation is unclear.
In terms of self-driving vehicle research, ordinary consumers, particularly “enthusiasts” who are interested in the driverless industry, can actively contribute their ideas, knowledge, and judgments for the further development of the industry.











 京公网安备 11010502051620号
京公网安备 11010502051620号




