
《1.引言》
1.引言
人们对自动驾驶汽车的展望已经有很长一段历史了。自1925年在纽约展示了无线电控制汽车的原型“Linrrican Wonder”后[1],自动驾驶技术就成为科幻小说的一个重要话题,并且最近,自动驾驶技术也进入了工程科学领域的研究范畴。目前,大型汽车制造企业和其他工业领域的从业者宣布了他们在未来十年内引进完全自动驾驶汽车的决心。
自动驾驶汽车正朝着市场投入的方向迈进。这就需要在汽车和基础设施方面都要具备一整套全面连接的,甚至系统整合的高端技术。自动驾驶的关键技术就是实时高清(HD)地图。这项技术对自动驾驶提出了三项主要挑战。
第一项挑战是汽车根据周边环境对自身进行精确定位的能力。第二项挑战是解决车载传感器覆盖范围外、距车头或车四周200m范围内的路况识别和反应的难题。第三项挑战是汽车在行驶过程中满足乘客和其他交通参与者的需求的能力[2]。
截止到目前,车载地图已经被广泛用于导航及搜索周边兴趣点,但这些地图的分辨率对于自动驾驶来说还是不够精确。另外,现有的地图不能满足实时信息(也就是实时地图)的要求,而且也不能为自动驾驶提供足够的信息。尤其在交通密度较高的城市环境中,对安全、完全自动驾驶的要求是极高的,不仅对汽车的规格有要求,而且对基础设施的规格也提出了很高的要求。欧洲在这一研究领域的进展概况为自动驾驶技术提供了其道路地图的智能系统[3]。
本文对基于未来城市——智能城市(iCity)的高清地图和旨在实现自动驾驶的应用科学研究机构的研究进行了剖析。
《2.高清地图(HD)和自动驾驶》
2.高清地图(HD)和自动驾驶
完全自动驾驶需要一套包括高性能传感器和机器人技术的智能控制系统,且要求技术系统必须能够明显反映人类所需要的驾车能力。仅仅简单识别道路位置对于自动驾驶来说是远远不够的。自动驾驶汽车必须有检测和规避障碍物的能力。在行驶途中,除了固定的障碍物,还包括动态移动的交通参与者,比如其他车辆(特别是在城市区域内)和脆弱的行人及骑车者。尤其在危急情况下,自动驾驶汽车的检测和控制系统必须有快速反应期。自动驾驶汽车需要一系列的诸如声纳设备、立体照相机、激光传感器、雷达和car-to-X通讯系统等的传感器技术。所有这些技术都有不同的关注点,而且每种技术都有一个堪比人类五感的一项或多项特定用途。自动驾驶汽车的主要感官就是LiDAR(light detection and ranging),即激光探测与测量,这是一个以激光为基础的,在汽车近场环境内探测物体的过程[4]。
图1展示了装备在自动驾驶汽车上的LiDAR设备采集的点云图像。
《图1》

图1.一辆接近十字路口的汽车的点云图像阐释了由Velodyn LiDAR收集的数据的复杂性[5]
激光探测与测量系统的重要性源于其准确性,其精度高达100m,旋转能力为360°。激光探测与测量系统可以以每秒超过两百万读数的工作效率为自动驾驶汽车提供车身周边环境的高分辨率信息。
自动驾驶汽车的第二个核心感官就是全球定位系统(GPS),这使汽车具备了粗略定位的能力。该定位能力是最先进的导航系统的基础,该系统拥有3D地理显示功能,能够显示虚拟现实建筑和短时交通信息。虽然这是一项先进的技术,但是全球定位系统的准确度已不能满足下一代高度自动驾驶汽车的要求了。在最理想的情况下,全球定位系统精确度能达到5m;然而,自动驾驶需要的是厘米级别的精确度。
对精确度的需求意味着自动驾驶汽车必须要配备整体的附加传感系统来提供汽车周边环境的实时高分辨率图像。雷达、超声波传感器和立体相机是汽车实时环境的重要“触角”。传感器数据和全球定位系统数据的融合使得汽车的定位精度保持在10cm以内。
除了高精度定位以外,车辆与基础设施、车辆与车辆直接的通信系统还可以提供更多的信息,从而增强对远达1km范围内的周边环境的感知能力。通过想象,数以万计的汽车就像相互连接的、可移动的探测设备一样运行着,同时配备着采集传感器数据和提供对应云解决方案的信息平台,这必将促进新的商业化模式的创新。因此,奥迪、宝马和戴姆勒等财团已经获得了诺基亚的衍生产品——HERE。这笔交易使这些汽车制造商得到了先进的导航软件去研发下一代自动驾驶汽车。
同其他竞争者相比,HERE的优势在于其所收集的巨大的数据量远超其他平台。将每辆汽车当作一种滚动测量仪,并以此为基础,通过应用大众外包商业模式,利用这种逻辑逐渐提高趋向完美、不断发展的云服务的质量。除了HERE,罗伯特•博世有限公司(Bosch)公司,通腾导航科技(中国)有限公司(TomTom)、拥有deCarta的优步公司,及谷歌和苹果公司都已经加入了追求自动驾驶汽车的队伍。
自动驾驶技术最有前景的策略之一就是即时定位与地图构建(SLAM)算法的应用。整合从配备云端高清地图数据的车载传感器实时收集到的数据,为自动驾驶提供汽车周边地标的虚拟图像,从而对汽车位置及其与其他道路使用者之间的关系做出准确判定。SLAM技术对自动驾驶的计算能力和数据传输能力提出很高要求。目前主要的发展瓶颈如下所述:
•数据采集:1h的驾驶时间能产生相当于1TB的数据。
•数据处理:通过高速处理设备分析收集到的1TB数据,需要花两天时间才能处理生成可用的导航数据。
•数据传输:虽然目前LTE(4G)技术已经能够使数据传输速度达到100Mbit·s–1,但是自动驾驶技术要求数据传输速度达到2.2Gbit·s–1。尽管5G技术能使数据传输速度达到5Gbit·s–1,但是在2020年后该技术才能市场化。
•延迟时间:对于实时执行来说,延迟时间必须低于10ms,这就要求车载系统具备高性能处理能力。
有关这些问题的研究现状通过原型方式证明了自动驾驶技术的能力。新的从业者和研究机构,如弗劳恩霍夫应用研究促进协会同汽车制造商和信息技术公司就考虑采用新的推进概念的解决方案展开合作[6]。对不同研究项目的进度必须要分别考虑。在全面考虑原始设备制造商(OEM)的需要列表的同时,对新的或即将诞生的科技企业要采取不同于一级汽车工业供应商的运营方式进行运营。随着安卓或CarPlay系统与嵌入式系统的整合,新的科技企业可以以更加敏捷和灵活的方式开发自动驾驶解决方案。当然,目前此项开发仍然停留在初级阶段;然而,若要实现完全自动化的转变,软件将会变成重要的驱动力。因此,为了保证能获取关键知识和技术,此领域的风险投资变得越来越重要,诺基亚HERE这个案例就证实了这一点。
对目前主要的自动驾驶研究项目所取得的进展进行分析,可以得到一些有趣的结论。例如,谷歌的成果并没有像媒体所暗示的那样成为一个市场化的解决方案。一个小型半自动汽车车队运行的多公里里程数据远远不能满足完全自动驾驶的要求。相比之下,诺基亚HERE拥有超过400辆配备有LiDAR和2400万像素的四台广角摄像头的汽车车队,而且已经绘制出超过3×106km区域的地图。研发高清地图所需的额外数据从内置陀螺仪和高端全球定位系统中获取。这些不同数据源的数据融合由拥有高性能处理能力的传感器数据融合设备来完成。数据的储存要求高速硬盘拥有大量存储空间。数据从汽车到中央云端计算机的传输过程是通过完整的硬盘信息交换来实现的。至今为止,这种方式是最快捷、最安全的。这些数据被用于描述道路情况和生成高清地图。基于此类高清地图,一辆完全自动驾驶的戴姆勒原型车可跨越德国完成测试。
除了依靠自动驾驶汽车的传感器外,如果想尝试让汽车在交通流中做出合适的行为,那么高清地图对自动驾驶技术的必要性就变得尤为明显。迄今为止,还没有一种传感器能够对汽车周边的环境进行准确定位和判断。虽然一些研究项目正在研究基于量子定位系统的解决方案,但这些研究仍处于初步阶段,而且第一代自动驾驶汽车的原型比一辆旅行车的后备箱都大。这套量子物理技术距投入使用还需要很多年的时间[7];所以,自动驾驶还得依靠动态高清地图。定位的准确性可通过利用类似建筑物的地标作为参照物进行高清地图的信息绘制来保证。依靠各种地标能够对汽车进行准确的定位。下一步就是在一系列汽车中完成高清地图绘制的整合[8]。
由成千上万辆测试车所收集的传感器数据使得建立高精度和实时信息的动态高清地图成为现实。通过这种自主学习的云端服务,最新更新的数据可通过4G蜂窝数据连接装置被发送到所有已注册的汽车中。加入的汽车越多,高清地图云端解决方案就会变得越准确。
目前,第一批自动驾驶汽车原型已经在封闭区域部署到位。为了通过自动驾驶仪运行汽车,宝马和奥迪已经在各个赛道上安装了高清地图,而且目前已经打破好几项单圈记录。高清地图同车载传感器和控制系统的整合使得高性能驾驶达到极高水平[9]。
自动驾驶的下一个等级的测试是离开像赛道这样的封闭区域,对其在公共高速道路上的自动驾驶性能进行测试,这比在城市环境下拥挤的交通中的测试难度要小。高度自动驾驶(HAD)指的是自动驾驶汽车在真实的交通环境(高速公路最高速度为130km·h–1)中安全驾驶的能力。据宝马公司的一项最新的研究报告,像环境感知、定位、驾驶技术和汽车控制等基础技术就是为高度自动驾驶所开发的[10]。
自动驾驶汽车的最终阶段就是在无人干预的、所有可以预想到的外界环境下的完全自动驾驶。这是该项技术面临的最大挑战,特别是在道路用户多样和交通密度高的高度复杂的未来城市交通环境中,这种情况尤为如此。
到目前为止,这份报告主要从汽车角度思考交通运输系统。然而,为了从车外角度(不管是由人还是由机器控制的汽车)解决复杂的交通状况,就必须建立起能够与周边环境进行通信交互的通信系统。此类通信系统涵盖其他交通参与者,以及交通标识和基于传感器的路边设施(图2)。车辆与车辆(V2V)通信系统可以通过预防碰撞和提供有问题的交通状况预警来帮助提高自动驾驶安全性。车辆与基础设施(V2I)通信系统是基于促进车载随意移动网络(VANETs)的路边基础设施而建设的;这些长期的解决方案对为自动驾驶提供重要安全应用和服务的智能交通系统(ITSs)有举足轻重的作用。虽然车载随意移动网络变得越来越令人着迷,但是当前的研究还不能在真实情况下完全有效解决车载随意移动网络技术的各种约束。
《图2》

图2.采集实时交通运行情况的数据并同车辆进行通信的路边设施。
为了保证车载随意移动网络的稳定无缝连接,最佳可用频道的全覆盖是必需的。目前,管理相邻路边单元的重叠信号是最大的挑战之一。在一项综合仿真研究中,Ghosh和他的研究团队[11]调查了“在不同的移动环境下,随意移动网络提供无处不在的通信的可行性和优势。通过使用如网络驻留时间(Network Dwell Time)、时间切换(Time Before Handover)和退出时间(Exit Times)等概念研究了重复效应”。车载随意移动网络研究领域的第一批研究结果表明“在城市道路和高速公路环境中,混合路由协议是车载随意移动网络的最佳选择”[12]。
在与工业互联网等专业互联网业界相联系的自动化和机器人领域中,强大的信息和通信技术是其发展的必要条件。在“充满智能和高度互联的智能城市”的未来发展愿景中,自动化汽车会变成网络实体系统[13]。
路边单元基础设施和车载高清地图的融合是实现自动驾驶非常有希望的途径。车载节点可从实时高清地图系统的车载部分获取准确的定位和道路信息,并且可以将其提供给基于路由协议的专门的交通互联网系统。车载随意移动网络高度动态和高速变化的网络拓扑正在生成准确的汽车周边环境的实时图像。通过这项技术,大量的智能自动驾驶技术得以实现[14]。
对从所有测试车辆上获取的数据进行大数据分析,可以为道路用户和政府研究机构提供额外的云服务。这类云服务的案例主要包括:
•自动汽车的深度机械学习(为了在交通环境中获得最佳表现);
•智能交通控制系统的持续改进;
•为污染控制开发生态路径探测器;
•基于监测机制的安全保障解决方案[15]。
因此,为自动驾驶技术开发的云解决方案被认为是未来交通系统基础设施建设的一部分,该系统将涵盖自动驾驶汽车、路边设施、高清地图以及云服务高性能计算和存储设备(图3)。
《图3》
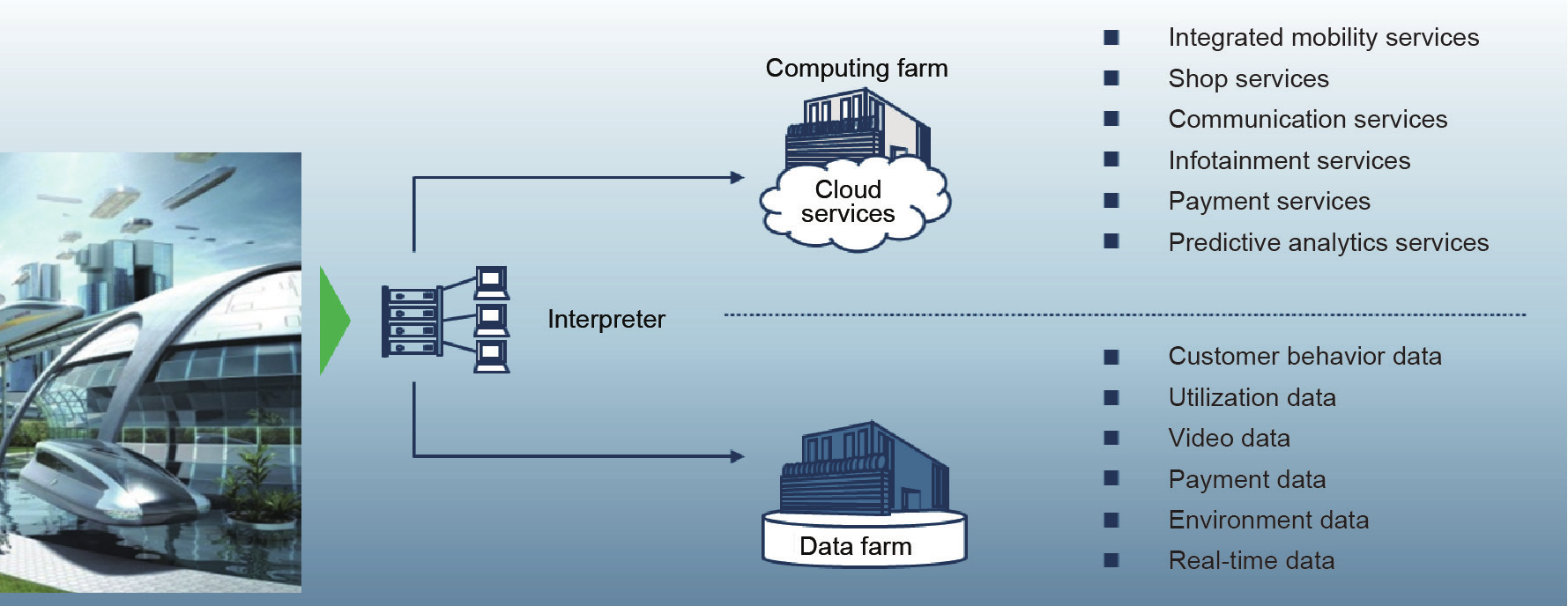
图3.与交通相关的云服务概念。
在当前的科技发展状况下,在智能城市中没有一项智能移动解决方案能够替代高清地图。为了克服现存的瓶颈,5G传输技术、中央(基础设施后端)和分散(车载)的高性能运算能力及大数据解决方案是必需的[16]。
至于更深层次的挑战,3D扫描技术将成为未来智能城市中自动驾驶的下一个发展阶段。这里有两种主要的获取3D高清地图数据的方式:第一种是为绘制高效准确的路面3D地图而配备仪表化的、高科技的设备车辆[17];第二种是配备类似于激光探测与测量系统或立体摄像机的这种轻型传感器的无人空中车辆系统,为摄影测量学提供新颖平台。这将会使3D扫描技术能够以自动快速的数据获取、低差错以及密集点云图像的方式获取精确的3D地图[18]。一旦开始实施自动驾驶技术,高清3D地图将会变得尤为关键,特别是在像中国这样的人口高度密集的城市。图4展示了未来智能城市的愿景并阐释了3D地图绘制所面临的挑战。
《图4》

图4.面临全新3D地图绘制挑战的未来智能城市[19]。
《3.总结》
3.总结
自动驾驶技术正在逐步变成现实。最新一代的高档车上配备的高级驾驶辅助系统(ADAS),可以让乘客在高速公路上拥有几秒钟的自动驾驶体验。这种功能的基础是能够扫描车周围环境的光学和雷达传感器,将这些扫描数据输入到操控、加速和刹车制动器,可保障汽车在低复杂性的情形下进行自动驾驶。这是实现自动驾驶的第一步。当转入到城市交通环境中时,这些传感器所获取的信息就不足以满足完全自动驾驶的需求了。这就需要获取准确的车辆位置、速度和方向以及当前交通状况和其他交通参与者的行为等数据。这种多维信息的基础参照就是精确度为±10cm的高清地图。通过更新,高清地图能够被增强至扫描更大范围(约1km范围内)的车周环境的实时状况。因此,高清地图是汽车工业面临的一项重要挑战,特别是因为这个主题直到现在还一直没有被当成是汽车制造企业的核心竞争力。
本文揭示了关于当前研究情况的一些背景信息,并展望了未来的发展愿景。
《Compliance with ethics guidelines》
Compliance with ethics guidelines
Heiko G. Seif and Xiaolong Hu declare that they have no conflict of interest or financial conflicts to disclose.











 京公网安备 11010502051620号
京公网安备 11010502051620号




